装车机械手计算说明书
- 格式:docx
- 大小:61.55 KB
- 文档页数:13
工业机器人结构设计00(陕理工机械工程学院机自专业000班,陕西汉中 723003)指导教师:000[摘要]本文简要介绍了工业机器人的概念,机器手硬件和软件的组成,即plc控制的机械手的系统工作原理,机械手各个部件的整体尺寸设计,plc控制的特点。
本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。
同时设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩.设计了机械手的手臂结构。
利用可编程序控制器对机械手进行控制,选取了合适的plc型号,根据机械手的工作流程制订了可编程序控制器的控制方案,画出了机械手的工作时序图,并绘制了可编程序控制器的控制程序.[关键词]工业机器人机械手The Industrial robot design000(Grade00,Class00,Major Mechanical Design,Manufacturing and Automation,415Dept。
,Shaanxi University of Technology,Hanzhong 723003,Shaanxi)Tutor:000Abstract This paper introduces the concept of the composition of industrial robots,robot hardware and software, system working principle that plc manipulator control,the overall size of the various components of the robot design, plc control characteristics. In this paper,the robot overall program design,to determine the coordinates of the robot forms and degrees of freedom to determine the technical parameters of the robot。
目录一、--------------------------------------------------- -投标书二、---------------------------------- 货物简要说明一览表三、------------------------------- 规格、技术参数偏离表四、---------------------------------------- 商务条款偏离表五、------------------------------------------------- 设备说明六、---------------------------------设计调试及预验收样件七、---------------------------------------------售后服务说明八、------------------------------------------时间进度计划表九、---------------------------------------------资质证明文件十、---------------------------------------------------------附件一、投标书致:上海汽车股份有限公司乘用车分公司根据贵方为上海汽车股份有限公司乘用车分公司招标设备名称:特殊工装文件编号:L-MP-171。
项目招标采购货物及服务的投标邀请,签字代表__姜明_____经正式授权并代表投标方上海乾承机械设备有限公司(原:上海塑良机械设备有限公司)地址:上海青浦区徐泾镇徐民路333号(1) 货物简要说明(2) 设备说明(3) 进程表(4) 资格证明文件等据此函,签字代表宣布同意如下:1.投标方将按招标文件的规定履行合同责任和义务。
2.投标方已详细审查全部招标文件,包括修改文件(如有的话)以及全部参考资料和有关附件。
我们完全理解并同意放弃对这方面有不明及误解的权利。
使命: 为客户提供有效的解决方案, 共创! 共赢! 共享!愿景: 创全球知名品牌, 建国际卓越企业!敢于追求创新立意高度敏锐放眼未来使命必达全力以赴团队合作不屈不挠勇于尝试敢于变革Mission: to provide customers with effective solutions and create together! Win win! Share!Vision: to create a global famous brand and build an international excellent enterprise!经营理念: 简单的事情重复做, 重复的事情用心做!Operation Concept : Repeating simple things , Repeating what you do attentively!全球销售网络分布图Global network sales location代理商Agent CULTURE CORPORATEn O rm T o l no基础框架Base Frame产品描述 :产品为一模两穴产品采用吸盘取出,料头用水口夹取出气路为两吸一夹夹具约为2.0 kgProduct Description:Two caves in one mold.Take product out with vacuum cup;Take sprue gate out with sprue gripper.Gas circuit divides into two suction and one gripping.The weight is about 2 kg.BOM 清单 BOM List清单仅含C RG 标准件 / The list contains only CRG standard parts.型材Extruded Profiles水口夹Sprue Gripper可旋转悬件双层吸盘Rotative SuspensionsVacuum Cups FGA Series十字型材连接件Cross Mounting Bracket For Profiles固定支架Mounting Bracket快换QuickBOM 清单 BOM ListBase Frame气动剪刀Air NipperSUS 钢管Sus Tube水口夹Sprue Gripper机械手固定支架Manipulator fixing bracket滑移支架Slide Bracket产品描述 :产品为一模两穴采用水口夹取料头连带产品取出夹具约为1.5 kgProduct Description:Two cavities in one mould;Taking products out and clamping the sprue by sprue gripper.The weight is about 1.5 kg.清单仅含C RG 标准件 / The list contains only CRG standard parts.Base Frame气动针夹Pneumatic Needle Gripper型材Extruded Profiles固定支架Mounting Bracket十字型材连接件Cross Mounting Bracket For ProfilesBOM 清单 BOM List产品描述 :产品为一模两穴嵌件(无纺布)采用气动针夹取出,埋入气路分为两路,一穴一路Product Description:重量:7 kgTwo cavities in one mould; Take out or embed the insert (Non-woven bafric) by pneumatic needle gripper;The gas circuit is divided into two paths; one cavity is one path.Weight: 7 kg清单仅含C RG 标准件 / The list contains only CRG standard parts.Base Frame双层吸盘Vacuum Cups FGA Series型材Extruded Profiles模具定位器Mould Positioner气动拨指Pneumatic Finger GripperBOM 清单 BOM List产品描述 :产品为一模一穴一侧取出 , 一侧埋入取出侧 : 采用吸盘 , 拨指取出气路为吸盘一路 , 拨指一路埋入侧 : 采用仿形 , 拨指取嵌件,埋嵌件气路为气缸一路 , 拨指一路 , 模具定位器一路重量:Product Description:9 kgOne cavity in one mould; Take out on one side ; embed on the other side;One side: Taken out by vacuum cup and one finger angular pneumatic gripper; The gas circuit is divided into two paths including vacuum cups and one finger angular pneumatic gripper; The other side: Profile modeling; Take out or embed by one finger angular pneumatic gripper; The gas circuit is divided into three paths including path of cylinder, path of one finger angular pneumatic gripper and path of mould positioner; Weight: 9Kg清单仅含C RG 标准件 / The list contains only CRG standard parts.Base Frame产品描述 :治具名称:仪表盘取出治具机台吨位:2700T 治具重量:25KG 料头数量:11个本产品因成型周期短,需模内完成取出+剪切动作,剪切精度要求0.3mm 以内,夹具采用无痕吸盘,夹持接触部位采用软胶垫,并使用角度可调多功能弯臂完成夹取。
1 1前言1.1工业机器人简介工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。
1.2世界机器人的发展国外机器人领域发展近几年有如下几个趋势:(1)工业机器人性能不断提高(高速度、高精度、高可靠性、便于操作和维修)(2)机械结构向模块化、可重构化发展。
例如关节模块中的伺服电机、减速机、检测系统三位一体化;由关节模块、连杆模块用重组方式构造机器人整机;国外已有模块化装配机器人产品问市。
(3)工业机器人控制系统向基于PC机的开放型控制器方向发展,便于标准化、网络化;器件集成度提高,控制柜日见小巧,且采用模块化结构;大大提高了系统的可靠性、易操作性和可维修性。
(4)机器人中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,装配、焊接机器人还应用了视觉、力觉等传感器,而遥控机器人则采用视觉、声觉、力觉、触觉等多传感器的融合技术来进行环境建模及决策控制;多传感器融合配置技术在产品化系统中已有成熟应用。
(5)虚拟现实技术在机器人中的作用已从仿真、预演发展到用于过程控制,如使遥控机器人操作者产生置身于远端作业环境中的感觉来操纵机器人。
(6)当代遥控机器人系统的发展特点不是追求全自治系统,而是致力于操作者与机器人的人机交互控制,即遥控加局部自主系统构成完整的监控遥控操作系统,使智能机器人走出实验室进入实用化阶段。
1 前言1.1 国内外发展概况]1[机械手首先是美国开始研制的。
1958年美国联合控制公司研制出第一台机械手。
它的结构是:机体上安装一个回转长臂,顶部装有电磁块的工件抓放机构,控制系统是示教型的。
1962年,美国联合控制公司在上述方案的基础上又试制成一台数控示教再现型机械手。
商名为Unimate(即万能自动)。
运动系统仿照坦克炮塔,臂可以回转、俯仰、伸缩、用液压驱动;控制系统用磁鼓作为存储装置。
不少球坐标通用机械手就是在这个基础上发展起来的。
同年该公司和普鲁曼公司合并成立万能自动公司,专门生产工业机械手。
1962年美国机械制造公司也实验成功一种叫Vewrsatran机械手。
该机械手的中央立柱可以回转、升降采用液压驱动控制系统也是示教再现型。
虽然这两种机械手出现在六十年代初,但都是国外工业机械手发展的基础。
1978年美国Unimate公司和斯坦福大学,麻省理工学院研究Unimate-Vicarm型工业机械手,装有小型电子计算机进行控制,用于装配作业,定位误差小于±1毫米。
联邦德国机械制造业是从1970年开始应用机械手,主要用于喷涂、起重运输、焊接和设备的上下料等作业。
联邦德国KnKa公司还生产一种喷涂机械手,采用关节式结构和程序控制。
日本是机械手发展最快、应用最多的国家。
自1969年从美国引进两种机械手后大力从事机械手的研究。
前苏联自六十年代开始发展和应用机械手,至1977年底,其中一半是国产,一半是进口。
目前,工业机械手大部分还属于第一代,主要依靠工人进行控制;改进的方向主要是降低成本和提高精度。
第二代机械手正在加紧研制。
它设有微型电子计算控制系统,具有视觉、触觉能力,甚至听、想的能力。
研究安装各种传感器,把感觉到的信息反馈,是机械手具有感觉机能。
第三代机械手则能独立完成工作中过程中的任务。
它与电子计算机和电视设备保持联系,并逐步发展成为柔性制造系统FMS和柔性制造单元FMC中的重要一环。
目录第一章 AGV体系结构 (2)1。
1 AGV的基本用途 (2)1.2 AGV基本车型和典型应用 (3)1.3 AGV的基本运行方式 (4)1.4 AGV的导向系统 (5)1。
5 AGV的区域闭锁 (5)1。
6 AGV通讯 (5)1。
7 AGV地址识别技术 (6)1.8 AGVS中的停车站 (6)1。
9 AGV蓄电池充电 (7)1。
10 AGV的行走机构 (8)1。
11 AGV小车控制系统概述 (9)1。
12 AGV小车计算机通讯协议 (10)1。
13 技术参数 (12)第二章 AGV小车手动操作说明书 (14)第三章 AGV软件操作说明 (21)第一章AGV小车体系结构自动导向车系统(以下简称AGVS)是无人操纵的自动化输送系统,主要由自动导车(以下简称AGV)、地面管理系统、(VSM)、导引系统、地址编码系统、通讯系统、停车站、充电站和周边设备等基本单元组成。
其中AGV是自动导向车系统的主要部分之一.AGV在日本被称作“无人驾驶运输车”、在欧洲一些公司被称作“智能运输车”.AGV的优点是:能实现揉性运输、使用灵活、运输效率高、节能、系统工作可靠、无公害可以改善工作环境。
目前国外AGV已广泛应用于汽车制造业、新闻印刷业、新闻纸工业、电子工业、机械加工业、家用电器业、食品业、自动仓库、火箭发射中心、高层建筑的事务所、图书馆、医院等许多领域。
近年来AGV和AGVS技术发展很快。
体现在:小车向智能化方向发展,车型品种繁多;系统采用计算机分级管理,在控制方面采用集散式控制技术;在通讯方面采用无线数字通讯、FSK(移频键控)、感应式数字通讯、红外通讯技术;在地址识别方面采用射频识别技术、光电识别技术、磁电识别技术;在车群管理方面采用分区控制、小车实时控制、优化调度、在线自动充电和模拟显示等先进技术。
不难看出AGVS是比AGV更为复杂的技术,这是因为AGVS所涉及的技术更多更难.对于用户来说决定AGVS的规模、AGV车型和相关技术是关系到用户经济利益和用户系统成败的关键。
一、总体方案设计1.1设计任务基本要求:设计一个多自由度机械手(至少要有三个自由度)将最大重量为40Kg的工件,由车间的一条流水线搬到别一条线上;二条流水线的距离为:1000mm;工作节拍为:70s;工件:最大直径为160mm 的棒料;1.2总体方案确定1.2.1自由度自由度是指机器人所具有的独立坐标轴运动的数目,但是一般不包括手部(末端操作器)的开合自由度。
自由度表示了机器人灵活的尺度,在三维空间中描述一个物体的位置和姿态需要六个自由度。
机械手的自由度越多,越接近人手的动作机能,其通用性就越好,但是结构也越复杂,自由度的增加也意味着机械手整体重量的增加。
轻型化与灵活性和抓取能力是一对矛盾,,此外还要考虑到由此带来的整体结构刚性的降低,在灵活性和轻量化之间必须做出选择。
工业机器人基于对定位精度和重复定位精度以及结构刚性的考虑,往往体积庞大,负荷能力与其自重相比往往非常小。
一般通用机械手有5~6个自由度即可满足使用要求(其中臂部有3个自由度,腕部和行走装置有2~3个自由度),专用机械手有1~2个自由度即可满足使用要求。
在控制器的作用下,它执行将工件从一条流水线拿到另一条流水线这一动作。
在满足前提条件上尽量使结构简单,所以我们这次选择5自由度机械手。
1.2.2机械手基本形式的选择常见的工业机械手根据手臂的动作形态,按坐标形式大致可以分为以下4种: (1)直角坐标型机械手:特点:操作机的手臂具有三个移动关节,其关节轴线按直角坐标配置。
优缺点:结构刚度较好,控制系统的设计最为简单,但其占空间较大,且运动轨迹单一,使用过程中效率较低。
结构图:(2)圆柱坐标型机械手:特点:操作机的手臂至少有一个移动关节和一个回转关节,其关节轴线按圆柱坐标系配置。
优缺点:结构刚度较好,运动所需功率较小,控制难度较小,但运动轨迹简单,使用过程中效率不高。
结构图:( 3)球坐标(极坐标)型机械手:特点:操作机的手臂具有两个回转关节和一个移动关节,其轴线按极坐标系配置。
目录1前言 (1)1.1 设计题目的背景及目的 (1)1.2 概述 (1)1.3. 机械手发展简史 (2)1.5 机械手应用概况 (3)1.6 发展趋势 (4)2 工业机械手设计概述 (5)2.1机械手设计目的及意义 (5)2.2 本次机械手的设计内容 (5)3 设计要求及方案论证 (6)4总体设计及分析 (8)4.1 系统原理介绍 (8)4.2 系统结构论述 (9)4.2.1机械手结构设计的特点 (10)5机械手各部分设计及计算 (10)5.1驱动系统的选择 (10)5.2 机械手基座部分设计 (12)5.2.1机械手基座结构的设计原则 (12)5.2.2 基座部分的设计计算 (13)5.2.3计算传动装置的运动和动力参数 (16)5.2.4主要传动尺寸的确定 (16)5.3 机械手手臂部分设计及计算 (23)5.3.1机械手手臂结构设计的原则: (23)5.3.2机械手手腕部分设计及其计算 (32)6 直接示教轻动化设计 (36)7 总结 (37)参考文献 (38)谢辞 (39)1前言1.1 设计题目的背景及目的机器人是近30年来发展起来的一种高科技自动化生产设备。
机械手是机器人的一个重要分支。
它的特点是可通过变成完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其是体现了人的智能和适应性,机器作业的准确性和在各种环境完成作业的能力。
本设计完成了多自由度关节式机械手的运动方案设计和驱动方式选择,并对机座,手臂及末端执行器等机械装置进行了结构设计。
本次设计的内容是多自由度关节式机械手的结构设计,属于工业机械手机械部分设计,本次设计的机械手属于专业机械手,主要附属于某一主机,如自动机床或生产线上,用以解决机床的上下料及工件的传输等任务,动作比较单一,只能完成某些特定的任务。
1.2 概述机器人是一种人类很早就梦想制造的、具有仿生性且处处听命于人的自动化机器,它可以帮助人类完成很多危险、繁重、重复的体力劳动或者进入各种服务领域。
第1章绪论1.1工业机械手简介机械手是模仿人的手部动作,按照给定程序、轨迹和要求实现自动抓取、搬运和操作的自动装置,它是机械化、自动化的重要手段。
因此,获得了日益广泛的应用,特别在高温、高压、危险、易燃、易爆、放射性等恶劣环境,以及笨重、单调、频繁的操作中,它代替了人的工作,具有重要的意义。
在机械加工中,冲压、铸、锻、焊、热处理、电镀、喷漆、装配以及轻工业、交通运输、国防工业等各方面,也已愈来愈引起人们的重视。
机械手一般由执行机构、驱动机构、控制机构以及位置检测装置等组成,驱动系统可采用液压传动、气动传动、电气传动和机械传动等形式,而多数采用电液机联合传动。
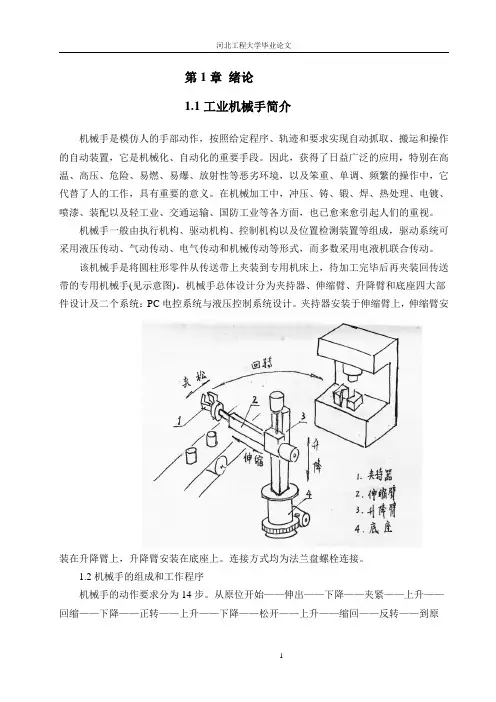
该机械手是将圆柱形零件从传送带上夹装到专用机床上,待加工完毕后再夹装回传送带的专用机械手(见示意图)。
机械手总体设计分为夹持器、伸缩臂、升降臂和底座四大部件设计及二个系统:PC电控系统与液压控制系统设计。
夹持器安装于伸缩臂上,伸缩臂安装在升降臂上,升降臂安装在底座上。
连接方式均为法兰盘螺栓连接。
1.2机械手的组成和工作程序机械手的动作要求分为14步。
从原位开始——伸出——下降——夹紧——上升——回缩——下降——正转——上升——下降——松开——上升——缩回——反转——到原位停止,准备下次循环。
圆柱形零件的尺寸为直径80毫米,高为150毫米,机械手回转角度为90度,升降高度为500mm,伸缩长度为300mm。
本设计为工业机器人机械手的夹持器设计,机器人通过夹持器的松紧动作,实现工件的加紧与放松。
第2章机械手设计2.1设计参数和性能要求(1)所要抓紧的工件直径为80mm。
放松动作时两爪间最大距离为110-120mm。
抓持速度为20mm/s,夹持器从运输车上抓取待加工的坯料送到加工机械上及把加工好的工件送回到运输车上。
(2)抓持速度为20mm/s(3)工件重约6㎏,材质:45#钢,(4)加紧动作平稳,起动和终止无刚性冲击;由运动分析及所需夹持力得到机构各部分尺寸。
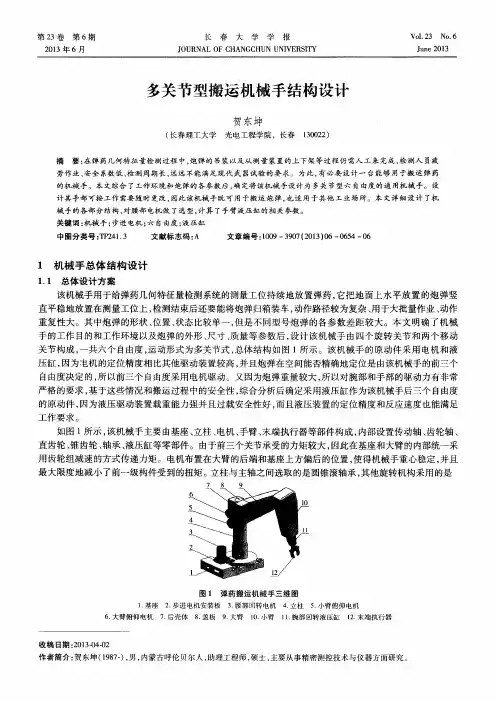
长春师范大学学报Journal of Changchun Normal University 2021年2月Feb.2021第40卷第2期Vol.40No.2轮胎「I动装配机械手结构设计张志豪,蒋东霖(长春师范大学工程学院,吉林长春130032)[摘要]轮胎自动装配机械手结构设计是针对汽车轮胎搬运、螺栓拧紧的机械结构设计。
该设计包含三部分,分别为螺栓拧紧部分、拧紧机轴前进部分、机械爪抓取部分。
三个部分协调配合,在生产线上将轮胎由一条生产线搬运至另外一条生产线,同时在第二条生产线上将轮胎装配到汽车上,完成对汽车轮胎的自动装配。
轮胎自动装配机械手避免了在汽车轮胎的装配过程中采用人工方式进行装配产生的诸多弊端,同时能够让汽车的生产满足自动化装配需求,打造未来自动化工厂。
[关键词]汽车轮胎;装配;机械手;结构设计[中图分类号]TH112[文献标志码]A[文章编号]2095-7602(2021)02-0187-051研究背景在当今社会中,汽车已经成为人们必不可少的交通工具之一。
我国汽车行业起步于20世纪50年代,经过多年努力,在技术上有了突飞猛进的发展。
汽车装配对汽车的性能、质量等有重要影响,但我国很多汽车配套装配设备仍依赖进口,从国内市场来看,多数汽车生产厂家在安装轮胎时不用自动化装配,而由工人先将轮胎送至汽车旁,然后移送至汽车轮胎安装处,最后手工将轮胎拧紧[1]o汽车轮胎装配时,人工搬运导致的工人劳动强度大、生产效率低、损伤轮毂、轮胎安全系数降低等问题亟待解决。
对国内外轮胎装配机械手的研究发现,关于汽车轮胎自动装配机械手系统的技术文献资料较少,关于夹具的设计资料在国内外现有文献中均未找到[2]o2总体设计结构及方案轮胎自动装配机械手的三维模型如图1所示。
轮胎自动装配机械手结构分为三部分,分别为螺栓拧紧机构、拧紧机轴前进机构、机械爪抓取机构。
螺栓拧紧机构由伺服电机、三级行星减速器、扭矩传感器、弹簧、拧紧轴、输出轴、花键联轴器等组成,伺服电机将输出的电机通过精密三级行星减速器、花键联轴器将输出转矩传递给输出轴,完成螺栓的拧紧。
FANUC机器人操作说明书资料FANUC机器人操作说明书资料一、安全注意事项在使用FANUC机器人之前,请务必阅读以下安全注意事项,确保操作过程的安全性:1、机器人操作应由经过充分培训且熟悉机器人系统的操作员进行。
未经授权的人员操作可能导致人身伤害或设备损坏。
2、确保机器人运行区域内的安全。
在操作机器人之前,清除杂物,确保机器人移动路径畅通无阻。
3、始终保持机器人周围的工作区域整洁、清晰,以防止意外碰撞。
4、在操作机器人之前,务必确认急停装置的位置并确保其处于良好状态。
5、操作机器人时,必须始终保持警惕,以防潜在的危险。
6、在操作过程中,如果机器人出现任何异常情况,立即按下紧急停止按钮,以停止机器人运动。
7、定期对机器人进行维护和检查,以确保其始终处于良好状态。
二、基本操作以下是FANUC机器人的基本操作步骤:1、打开机器人控制电源,启动机器人。
2、通过示教器或触摸屏界面,输入机器人程序并加载运行。
3、使用手动控制模式,手动操纵机器人的关节轴,使其移动到所需位置。
4、根据程序设置,调整机器人的运动速度和加速度,以确保安全运行。
5、在运行过程中,根据需要调整机器人的运动轨迹和姿态。
6、当完成程序运行时,通过示教器或触摸屏界面停止程序的执行。
7、关闭机器人电源,结束操作。
三、编程与调试以下是FANUC机器人的编程与调试步骤:1、使用示教器或触摸屏界面进入编程模式。
2、根据所需任务和工艺要求,创建新的机器人程序或修改现有程序。
3、在程序中添加必要的指令和动作,以实现所需的运动路径和姿态。
4、对程序进行调试和优化,确保机器人在安全、稳定和高效的情况下运行。
5、在调试过程中,根据实际运行情况进行必要的参数调整和优化。
6、当程序调试完成后,将其保存并退出编程模式。
7、在实际运行过程中,根据需要随时调整程序参数和指令,以满足不同的工艺需求。
四、维护与保养为了保证FANUC机器人的稳定性和持久性,以下是一些建议的维护与保养操作:1、定期检查机器人的关节轴、传感器和电缆等部件是否有磨损或损坏。
“变形金刚”机械人设计说明书目录1、设计题目的背景 (2)1.1 设计题目的要求 (2)1.2 场地的分布 (3)1.3参赛作品内容 (4)1.4机器人实物模型的制作规定 (4)2、设计方案的拟定 (4)2.1过河方案的选择 (4)2.1.1过河方案设想一(独木桥式) (5)2.1.2过河方案设想二(自己展开式) (5)2.1.3过河方案设想三(上下台阶) (5)2.1.4过河方案设想四(过平桥) (5)2.2抓取机械手方案的选择 (7)2.2.1对机械手抓取目标物分析 (7)2.2.2对机械手抓取目标物形状的选择 (7)2.2.3旋转螺母机械手方案的选择 (8)2.3最终设计模型展示 (9)2.3.1作品的特点 (10)3、理论依据 (11)3.1底盘分析与计算 (11)3.1.1自制轮 (11)3.1.2驱动的选择 (11)3.1.3轮子分布(二维图见附件) (12)3.2机械手的分析与计算 (14)3.2.1抓取机械手的分析 (14)3.2.2旋转螺母机械手的分析 (16)4、线路设计 (20)4.1行走电机控制 (20)4.2机械手电机控制 (21)5、特色 (21)5.1底盘特色 (21)5.2机械手特色 (21)6、结束语 (21)7、参考文献 (22)8、附件 (22)“变形金刚”机械人设计说明书摘要:本文通过对题目背景的分析,从过河机构设计、抓取机构设计、旋转机构设计三个方面为切入点,运用对比的方法选择最优方案为重力偏右式的过河机构、拉线式的抓取机构、普通旋转螺母机构,通过proe 软件绘制三维图,再通过对行走驱动计算选择电机型号。
通过齿轮传动设计与校核确定齿轮的大小。
采用四个机械手(三个抓取机械手,一个旋转机械手)提高工作效率。
关键词:对比 重力偏右式 拉线式普通旋转螺母 四个机械手1、 设计题目的背景1.1 设计题目的要求竞赛题目来源于第十届浙江省大学生机械设计竞赛,要求如下几点:1、机器人在设计收缩状态时,其长宽高均应≤300mm (展开状态时尺寸不限) 。
机械设计课程设计 设计计算说明书
设计题目: 装车机械手 姓 名:XXX 学 号:XXX 班 级:XXX 指导教师:XXX 设计时间:XXX 目 录 一、设计任务书…………………………………………………1 二、传动方案修改………………………………………………2 三、总体设计计算………………………………………………3 1. 电机型号选择 2. 各级传动比分配 3. 各轴的运动参数和动力参数计算(转速、功率、转矩) 四、传动机构设计计算 ………………
1. 齿轮传动(一):齿轮3与齿轮4 2. 齿轮传动(二):齿轮5与齿轮6 五、轴系零件设计计算………………
1. 轴的设计计算(一):轴2 2. 轴的设计计算(二):轴3 六、润滑和密封方式的选择……………………………………
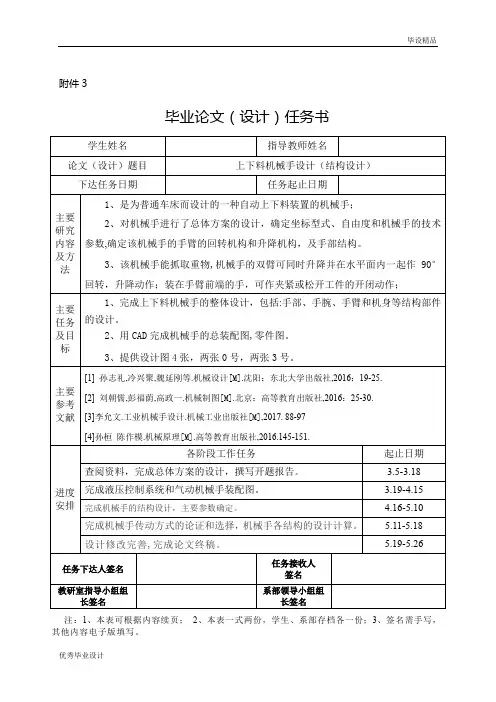
七、箱体及附件的结构设计和选择…………………………… 八、设计总结…………………………………………………… 参考文献………………………………………………………… 一、设计任务书 设计题目:装车机械手 设计一台装车机械手,将生产线上的纸箱搬运到货车车厢。如图所示,已知纸箱箱体尺寸A×B×Cmm3,重M kg,其他条件及要求见表一。要求搬运能力J件/小时,工作寿命6年,每年工作300天。选择电动机型号,分配总传动比,计算各轴的转速、输入输出功率。对各级传动进行设计计算,并对整机进行结构设计。允许选用步进电机正反转工作。
设计过程及计算说明 二、传动方案修改 1. 系统运动方案图 注一: 1.零件1是带内螺纹的套筒,与齿轮2做成一体; 2.零件2是带外螺纹的套筒,与零件1旋合; F=1000N V=2.0m/s D=500mm L=500mm
纸H L C
B
机械手 K A 车箱 3.零件3是与上机箱连接的空心轴; 注二: 1.零件3与轴4之间用滑键连接,零件3可随轴4转动,并可沿其上下移动; 2.零件2带动零件3上下运动; 3.零件2与零件3、零件3与轴4之间皆用圆锥滚子轴承。
三、总体设计计算
1、电机型号选择 (1)电动机类型的选择: Y系列三相异步电动机 (2)电动机功率选择: 传动装置的总功率: η1=η联轴器×η4轴承×η3齿轮 =0.96×0.982×0.97×0.99×0.96 =0.808 η2=η联轴器×η3轴承×η齿轮×η梯形螺纹 =0.96×0.983×0.97×0.4 =0.350 电机所需的工作功率: P工作1=jW/η1 =100×0.393/0.808 =48W P工作2=FV/η2 =75W P工作=P工作1+ P工作2 =123W (3)确定电动机转速: 计算滚筒工作转速: n筒=60×0.25/4 =3.75r/min n升降=0.1×60/(4×0.01) =150r/min 按手册P7表1推荐的传动比合理范围,取圆柱齿轮传动一级减速器传动比范围i’a=3~5。则三级圆柱直齿轮的总传动比现实范围为i’a=27~125,因步进电机转速可调,故可将电机转速设为100r/min。 (4)确定电动机型号 根据以上选用的电动机类型,所需的额定功率及同步转速,选定电动机型号为Y2-712-6。 其主要性能:额定功率:250,满载转速850r/min,额定转矩2.0。设置转速为100r/min。 2、计算总传动比及分配各级的传动比 n升降=150r/min n滚筒=3.75r/min η1=0.808 η2=0.350 P工作=123W 电动机型号 Y2-712-6 i1=80/3
i2=2/3
据手册得 I12=2/3
I34=8/3
I56=10/3
I78=3
nI =100r/min
nII=37.5r/min
nIII=11.25r/min
nⅣ=3.75
r/min
PI=238W
PII=88W
PIII=84W
PIⅣ
=80W
TI=22729N·mm
TII=22411N·mm
TIII=71307N·mm
TⅣ
=203723N·mm (1)总传动比: i1=n电动/n转轴=100/3.75=80/3
i2=n电动/n升降=100/150=2/3
(2)分配各级传动比 取齿轮i齿轮1=2/3,i齿轮2=8/3,i齿轮3=10/3,
i齿轮4=3;
∵i1=i齿轮2×i齿轮3×i齿轮4=80/3
∴i2= i齿轮1=2/3
3、各轴运动参数及动力参数计算 (1)计算各轴转速(r/min) nI=n电机=100r/min
nII=nI/i齿轮1=100×3/8=37.5 (r/min)
nIII=nII/i齿轮2=37.5×3/10=11.25(r/min)
nⅣ=nIⅢI/i齿轮3=11.25/3=3.75(r/min)
(2)计算各轴的功率(KW) PI=250×0.97=238W
PII=PI×η齿轮×η轴承=88W
PIII=PII×η轴承×η齿轮=84W
PIⅣ=PⅢ×η轴承×η齿轮
=80W
(3)计算各轴扭矩(N·mm) TI=9.55×106PI/nI=22729N·mm
TII=9.55×106PII/nII=22411N·mm
TIII=9.55×106PIII/nIII=71307N·mm
TⅣ=9.55×106PIⅣ/nⅣ=203723N·mm
四、传动机构设计计算
1、齿轮传动的设计计算(一):齿轮3与齿轮4 1.选定齿轮类型、精度等级、材料及齿数 (1)根据要求,齿轮采用软齿面直齿轮。压力角取20°。 (2)参考《机械设计》表10-6,选用7级精度。 (3)材料选择。由《机械设计》表10-1,小齿轮选用40Cr(调质),齿面硬度为280HBS。大齿轮选用45(调质),齿面硬度240HBS; (4)选小齿轮齿数Z3=24,大齿轮齿数Z4=u Z3=8/3x24=64 2.按齿面接触疲劳强度设计 由式计算小齿轮分度圆直径,即 𝑑3𝑡≥√2𝐾𝐻𝑡𝑇1𝑑𝑢+1𝑢(𝑍𝐻𝑍𝐸𝑍𝜀[𝜎𝐻])23 1)确定公式中的各参数值 ①试选KHt=1.3。 ②小齿轮传递的转矩T1=22729N·mm。 I34=8/3 Z3=24 Z2=64 u=8/3 T1=22729N·mm αHlim3=500Mpa
αHlim4=430Mpa
N3=1.728×108
NL2=6.48×107
[σH]3=666Mpa [σH]2=649Mpa d1=32.182mm
m=1.69mm
𝑌𝐹𝑎𝑌𝐹𝑎
[𝜎𝐹]=0.0157
𝑚𝑛𝑡=1.035 m=2 𝑧3
=17 ③取齿宽系数𝑑
=1
。
④查得区域系数𝑍𝐻=2.5
。
⑤查得材料的弹性影响系数𝑍𝐸=189.8𝑀𝑃𝑎12⁄。 ⑥计算接触疲劳强度用重合度系数𝑍𝜀。 𝛼𝑎3=arccos[𝑧3𝑐𝑜𝑠𝛼(𝑧3+2ℎ𝑎∗⁄=arccos[24×𝑐𝑜𝑠20°(24+2×1)⁄]
=29.841°
𝛼𝑎4=arccos[𝑧4𝑐𝑜𝑠𝛼(𝑧4+2ℎ𝑎∗⁄=arccos[24×𝑐𝑜𝑠20°(64+2×1)⁄]
=24.326°
𝜀𝛼=[𝑧3(𝑡𝑎𝑛𝛼3−𝑡𝑎𝑛𝛼′)+𝑧4(𝑡𝑎𝑛𝛼4−𝑡𝑎𝑛𝛼′)]2𝜋⁄ =[24×(𝑡𝑎𝑛29.841°−𝑡𝑎𝑛20°)+64×(𝑡𝑎𝑛24.326°−𝑡𝑎𝑛20°)] 2𝜋⁄ =1.698
𝑧𝜀=√4−𝜀𝛼3=√
4−1.698
3 =0.876
⑦计算接触疲劳许用应力[𝜎
𝐻]
。
查得小齿轮和大齿轮的接触疲劳极限分别是𝜎𝐻𝑙𝑖𝑚3=600𝑀𝑝𝑎
、
𝜎𝐻𝑙𝑖𝑚4=550𝑀𝑝𝑎 计算应力循环次数: N3=60n1jLb=60x100x1x(6x300x2x8)=1.728x108 N4=N1/u=1.728x108/(64/24)=6.48x107 查得接触疲劳寿命系数KHN3=1.11,KHN4=1.18。 取失效概率为1%,安全系数S=1,得
[𝜎𝐻]3=𝐾𝐻𝑁3𝜎𝐻𝑙𝑖𝑚3𝑆=1.11×6001𝑀𝑃𝑎=
666𝑀𝑃𝑎 [σ𝐻]4=𝐾𝐻𝑁4𝜎𝐻𝑙𝑖𝑚4𝑠=1.18×5501MPa=649MPa 取其中较小者作为该齿轮副的接触疲劳许用应力,即 [σ
𝐻]=[σ𝐻]4=649MPa
2)计算小齿轮分度圆直径
𝑑3𝑡≥√2𝐾𝐻𝑡𝑇1𝑑𝑢+1𝑢(𝑍𝐻𝑍𝐸𝑍𝜀[𝜎𝐻])23
=√2×1.3×227291(6424)+1⁄6424(2.5×189.8×0.876649)23 =32.182mm
(2)调整小齿轮分度圆直径
𝑧4
=45
d3=34 d4=90 a=62 b3=41 b4=34 m=2 z5=18 z6=60 d5=36 d6=120 a=78 b5=42 b6=36 P2=88w n2=37.6r/min T2=22411N·mm