(完整word版)SAR合成孔径雷达图像点目标仿真报告(附matlab代码)
- 格式:doc
- 大小:656.16 KB
- 文档页数:24
合成孔径matlab摘要:1.合成孔径雷达(SAR)简介2.合成孔径雷达(SAR)在Matlab 中的实现3.合成孔径雷达(SAR)的参数设置与优化4.合成孔径雷达(SAR)的应用领域5.总结正文:合成孔径雷达(Synthetic Aperture Radar,简称SAR)是一种高分辨率成像技术,通过合成一个虚拟的孔径,可以获得地物的高分辨率二维或三维图像。
它具有不受光照和气象条件影响、可实现全天候、全天时工作等优点。
近年来,随着电子技术的不断发展,SAR 技术在各个领域得到了广泛的应用。
在Matlab 中,可以利用现有的工具箱或自编代码实现SAR 数据的处理与分析。
首先,需要安装Matlab 的Image Processing Toolbox 和Signal Processing Toolbox,这两个工具箱提供了丰富的图像处理和信号处理功能。
接下来,可以通过以下步骤实现SAR 数据的处理:1.数据预处理:包括噪声去除、滤波等操作,提高SAR 数据的质量。
2.参数设置:根据实际需求设置SAR 的参数,如波长、天线方向图、观测距离等。
3.成像处理:利用SAR 的原理,对预处理后的数据进行成像处理,得到SAR 图像。
4.图像优化:根据需要对SAR 图像进行进一步处理,如图像增强、滤波等。
5.结果分析:对处理后的SAR 图像进行分析,提取地物信息。
合成孔径雷达(SAR)的参数设置与优化是实现高质量成像的关键。
在Matlab 中,可以通过调整参数实现对SAR 图像质量的优化。
主要包括以下几个方面:1.波长:波长对SAR 图像的空间分辨率有直接影响,波长越短,空间分辨率越高。
但同时,波长也会影响到SAR 的穿透能力和接收信号强度。
2.天线方向图:天线方向图决定了SAR 的成像范围和形状,不同方向图适用于不同场景。
3.观测距离:观测距离影响到SAR 图像的分辨率和质量,需要根据实际需求进行选择。
合成孔径雷达(SAR)技术在众多领域都有广泛应用,如军事侦察、地质勘探、环境监测、城市规划等。
合成孔径matlab报告
合成孔径雷达(SAR)是一种用于合成孔径雷达的计算机技术,通过使用不同的脉冲编码和信号处理技术,可以获得高分辨率的图像。
在SAR中,接收到的信
号被数字化并存储在计算机中,然后使用适当的算法进行处理以获得所需的图像。
在MATLAB中,可以使用不同的函数和工具箱来处理SAR数据。
其中,最常用的函数是“imread”和“imwrite”,它们可以用于读取和写入SAR图像。
此外,还可以使用其他函数和工具箱,例如“fft”和“ifft”,来执行快速傅里叶变换,以在频率域中进行图像处理。
在SAR数据处理中,常见的算法包括运动补偿、多普勒频率补偿、斑点噪声抑制、多视处理等。
其中,运动补偿是SAR数据处理中最关键的步骤之一。
由于SAR飞行器的运动和地面目标的运动,必须对接收到的信号进行运动补偿,以消除运动引起的失真。
在MATLAB中,可以使用不同的算法来实现运动补偿。
其中,最常用的算法是
距离走动补偿算法。
该算法通过计算每个像素点的距离走动量,并将其应用于相应的像素点来补偿运动失真。
除了运动补偿外,SAR数据处理还包括其他一些步骤,例如多普勒频率补偿、斑点噪声抑制和多视处理等。
这些步骤可以通过MATLAB中的不同函数和工具箱来实现。
MATLAB是一种强大的计算机编程语言,可用于SAR数据处理和分析。
通过使用不同的函数和工具箱,可以实现对SAR数据的处理和分析,从而获得高分辨率的图像。
(完整)雷达系统仿真matlab代码编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望((完整)雷达系统仿真matlab代码)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为(完整)雷达系统仿真matlab代码的全部内容。
%====================================================================== =====================%% 该程序完成16个脉冲信号的【脉压、动目标显示/动目标检测(MTI/MTD)】%===================================================================================== ======%%程序中根据每个学生学号的末尾三位(依次为XYZ)来决定仿真参数,034% 目标距离为[3000 8025 9000+(Y*10+Z)*200 8025],4个目标%目标速度为[50 0 (Y*10+X+Z)*6 100]%===================================================================================== ======%close all;%关闭所有图形clear all; %清除所有变量clc;%===================================================================================%%雷达参数 %%===================================================================================% C=3.0e8; %光速(m/s)RF=3.140e9/2; %雷达射频 1。
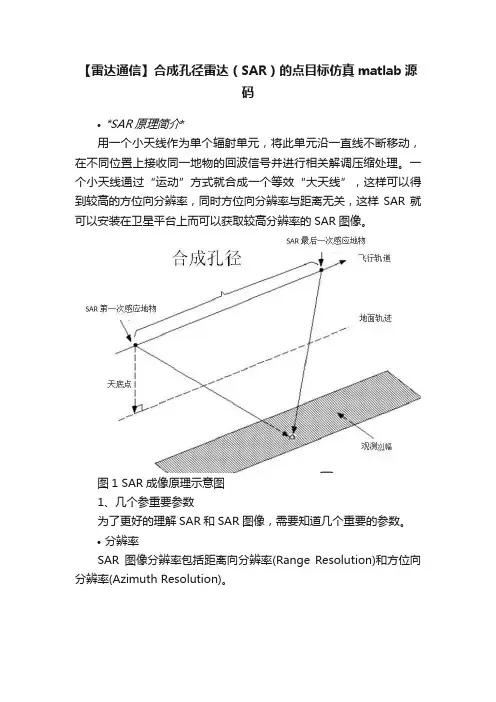
【雷达通信】合成孔径雷达(SAR)的点目标仿真matlab源码•*SAR原理简介*用一个小天线作为单个辐射单元,将此单元沿一直线不断移动,在不同位置上接收同一地物的回波信号并进行相关解调压缩处理。
一个小天线通过“运动”方式就合成一个等效“大天线”,这样可以得到较高的方位向分辨率,同时方位向分辨率与距离无关,这样SAR就可以安装在卫星平台上而可以获取较高分辨率的SAR图像。
图1 SAR成像原理示意图1、几个参重要参数为了更好的理解SAR和SAR图像,需要知道几个重要的参数。
•分辨率SAR图像分辨率包括距离向分辨率(Range Resolution)和方位向分辨率(Azimuth Resolution)。
图2 距离向和方位向示意图•距离向分辨率(Range Resolution)垂直飞行方向上的分辨率,也就是侧视方向上的分辨率。
距离向分辨率与雷达系统发射的脉冲信号相关,与脉冲持续时间成正比:Res( r) = c*τ/2其中c为光速,τ为脉冲持续时间。
•方位向分辨率(Azimuth Resolution)沿飞行方向上的分辨率,也称沿迹分辨率。
如下为推算过程:·真实波束宽度:β= λ/ D·真实分辨率:ΔL = β*R = Ls (合成孔径长度)·合成波束宽度βs = λ /(2* Ls) = D / (2* R)·合成分辨率ΔLs = βs* R = D / 2其中λ为波长,D为雷达孔径,R为天线与物体的距离。
从这个公式中可以看到,SAR系统使用小尺寸的天线也能得到高方位向分辨率,而且与斜距离无关(就是与遥感平台高度无关)。
图3 方位向分辨率示意图•极化方式雷达发射的能量脉冲的电场矢量,可以在垂直或水平面内被偏振。
无论哪个波长,雷达信号可以传送水平(H)或者垂直(V)电场矢量。
接收水平(H)或者垂直(V)或者两者的返回信号。
雷达遥感系统常用四种极化方式———HH、VV、HV、VH。
sar面目标回波仿真matlab程序根据提供的信息,可以得知,本篇回答是关于 SAR 面目标回波仿真MATLAB 程序方面的。
SAR 技术全称 Synthetic Aperture Radar,是一种利用合成孔径技术合成雷达波束的一种雷达成像技术。
SAR 系统可将地面平面上各个点的反射信号合成为一条与雷达运动方向垂直的轨迹,从而得到一张高分辨率的 SAR 图像。
在 SAR 图像重建的过程中,面目标回波仿真是一个非常重要的步骤。
通过对面目标回波仿真计算,我们可以模拟测试 SAR 系统对不同类型目标的检测识别能力以及成像效果,从而确定 SAR 系统的整体性能,为 SAR 的实际应用提供依据。
而 MATLAB 是一款十分优秀的科学计算软件,它提供了非常丰富的功能工具箱和可视化工具,方便科研人员和工程师们快速有效地实现SAR 的图像处理、面目标回波仿真等计算过程。
下面我们将重点介绍一下如何使用 MATLAB 实现 SAR 面目标回波仿真程序设计。
首先,我们需要定义一个面目标,包括其散射中心、面积、形状、反射率等参数。
然后,通过 SVD(奇异值分解法)或其他数值计算方法对目标进行回波模拟,得到模拟回波数据。
接着,将模拟回波数据代入SAR 成像算法,对其进行图像重建与处理,得到SAR 图像。
最后,通过对 SAR 图像的分析和评估,确定 SAR 系统性能和目标检测效果的准确性。
具体实现过程如下:1. 定义面目标的散射中心、面积、形状和反射率等参数。
二维图形中,可以用矩阵表示目标的位置和大小;三维图形中,可以用立方体体元 (cubature) 表示目标的位置、大小、方向和反射率。
2. 对目标进行回波模拟。
可以考虑使用 SVD 等数值计算方法,将目标的反射系数表示为若干个基函数的线性组合形式,然后将其分段连续函数化,用离散化的形式进行数值计算,得到目标回波数据。
3. 进行 SAR 成像算法处理。
可以选择相位历程算法、谱带归一化算法、旋转并且叠加相干序列算法等成像算法。
超声合成孔径成像 matlab
(原创版)
目录
1.超声合成孔径成像简介
2.Matlab 在超声合成孔径成像中的应用
3.超声合成孔径成像的优点
4.面临的挑战和未来发展方向
正文
一、超声合成孔径成像简介
超声合成孔径成像(Synthetic Aperture Imaging,SAI)是一种基于合成孔径雷达(Synthetic Aperture Radar,SAR)的成像技术。
它利用雷达在不同位置接收到的回波信号,通过数据处理方法合成一个大孔径的天线,从而获得高分辨率的图像。
这种技术在环境观测、灾害监测、地图测绘以及战场态势侦察等领域有着广泛应用。
二、Matlab 在超声合成孔径成像中的应用
Matlab 是一种广泛应用于科学计算和工程设计的软件,它可以方便地实现超声合成孔径成像。
通过 Matlab,可以模拟雷达回波信号的接收过程,并进行数据处理,最终生成合成孔径成像的结果。
三、超声合成孔径成像的优点
超声合成孔径成像技术具有以下几个优点:
1.高分辨率:通过合成大孔径的天线,可以获得高分辨率的图像,提高目标识别的准确性。
2.穿透性:超声波可以穿透一定深度的物体,因此合成孔径成像可以应用于各种材料的探测和成像。
3.全天时、全天候工作:合成孔径成像不受气象条件影响,可以在任何时间、任何天气情况下进行工作。
4.灵活性:合成孔径成像可以灵活地调整雷达的参数,例如工作频率、脉冲重复频率等,以适应不同的应用场景。
四、面临的挑战和未来发展方向
尽管超声合成孔径成像技术具有许多优点,但仍然面临着一些挑战,例如如何提高成像速度、如何降低系统成本等。
基于MATLAB的SAR点目标成像仿真1 课题来源雷达成像技术是20世纪50年代发展起来的。
它是雷达发展的一个重要里程碑。
从此,雷达的功能不仅仅是将所观测的对象视为“点”目标,来测定它的位置与运动参数,而且它能获得目标和场景的图像。
同时,由于雷达具有全天候、全天时、远距离和宽广观测带,以及易于从固定背景中区分运动目标的能力,从而使雷达成像技术受到广泛重视。
雷达成像技术应用最多的是合成孔径雷达(SAR,Synthetic Aperture Radar)。
当前,机载和星载SAR的应用已十分广泛,已可得到亚米级的分辨率,场景图像的质量可与同类用途的光学图像相媲美。
利用SAR的高分辨能力,并结合其他雷达技术,SAR还可完成场景的高程测量,以及在场景中显示地面运动目标(GMTI)。
SAR的高分辨,在径向距离上依靠宽带信号,几百兆赫的频带可将距离分辨单元缩小到亚米级;在方位上则依靠雷达平台运动,等效地在空间形成很长的线性阵列,并将各次回波存储作合成的阵列处理,这正是合成孔径雷达名称的来源。
合成孔径长度可达几百米或更长,因而可获得高的方位分辨率。
本课题是信号处理方面的理论研究课题,它的提出是为了使本人运用相关专业知识理解各种算法原理,从而进一步认识合成孔径雷达成像原理。
在此基础上,利用MA TLAB语言编程在MATLAB平台上实现仿真图像。
2 研究目的和意义合成孔径雷达是一种高分辨率成像雷达。
即使在能见度极差的气象条件下,利用合成孔径雷达技术,我们也可以得到类似光学摄像的高分辨率雷达图像。
这是因为微波成像不受气候、昼夜等因素的影响,具有全天时、全天候的优点。
1951年,美国Goodyear航空公司的C.Wiley首次提出用多普勒频率分析方法分析改善机载雷达角分辨率的思想,这就是早期的合成孔径技术。
接着,又有学者提出了利用载机的规则运动可以将雷达的真实天线尺寸合成为大尺寸的线性天线阵列的概念。
合成后的孔径长度比真实天线大很多,因此合成孔径技术可以大大提高雷达方位向的分辨率。
合成孔径雷达仿真参数
合成孔径雷达(SAR)是一种通过合成天线孔径来产生高分辨率雷达成像的技术。
在进行SAR仿真时,需要考虑多种参数,包括以下几个方面:
1. 地物特征参数,地物的反射特性对SAR成像有着重要影响,包括地物的电磁特性、形状、方向等。
这些参数对于合成孔径雷达的仿真至关重要,因为它们直接影响着SAR成像的质量和分辨率。
2. 平台参数,包括飞行高度、速度、姿态稳定性等。
这些参数会影响到合成孔径雷达的观测角度和观测距离,进而影响成像的质量和分辨率。
3. 雷达参数,包括雷达频率、脉冲重复频率、极化方式等。
这些参数会直接影响到合成孔径雷达的成像性能,例如频率决定了分辨率,极化方式决定了反射特性。
4. 地形参数,地形对合成孔径雷达成像也有着重要的影响,包括地形的起伏、遮挡等。
在仿真中需要考虑地形对雷达信号的散射和反射情况。
5. 天气参数,大气条件对合成孔径雷达成像也有一定影响,例如大气湍流会导致信号的衰减和散射。
在仿真中需要考虑不同天气条件下的成像效果。
综上所述,合成孔径雷达的仿真参数涉及到地物特征、平台参数、雷达参数、地形参数和天气参数等多个方面,需要综合考虑这些参数对合成孔径雷达成像的影响,以获得准确的仿真结果。
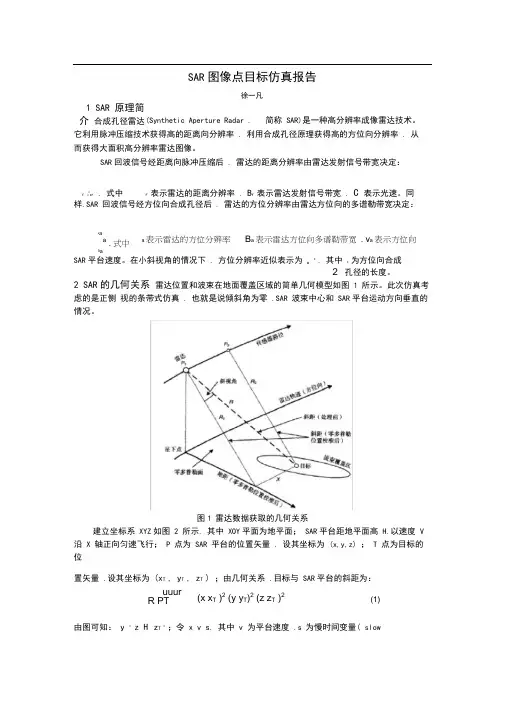
SAR 图像点目标仿真报告徐一凡1 SAR 原理简介 合成孔径雷达 (Synthetic Aperture Radar . 简称 SAR)是一种高分辨率成像雷达技术。
它利用脉冲压缩技术获得高的距离向分辨率 . 利用合成孔径原理获得高的方位向分辨率 . 从 而获得大面积高分辨率雷达图像。
SAR 回波信号经距离向脉冲压缩后 . 雷达的距离分辨率由雷达发射信号带宽决定:r 2CB r. 式中r表示雷达的距离分辨率 . B r 表示雷达发射信号带宽 . C 表示光速。
同样.SAR 回波信号经方位向合成孔径后 . 雷达的方位分辨率由雷达方位向的多谱勒带宽决定:SAR 平台速度。
在小斜视角的情况下 . 方位分辨率近似表示为 a D. 其中 D为方位向合成2 孔径的长度。
2 SAR 的几何关系 雷达位置和波束在地面覆盖区域的简单几何模型如图 1 所示。
此次仿真考虑的是正侧 视的条带式仿真 . 也就是说倾斜角为零 .SAR 波束中心和 SAR 平台运动方向垂直的情况。
图1 雷达数据获取的几何关系建立坐标系 XYZ 如图 2 所示. 其中 XOY 平面为地平面; SAR 平台距地平面高 H.以速度 V 沿 X 轴正向匀速飞行; P 点为 SAR 平台的位置矢量 . 设其坐标为 (x,y,z) ; T 点为目标的位置矢量 .设其坐标为 (x T , y T , z T ) ;由几何关系 .目标与 SAR 平台的斜距为:由图可知: y 0,z H ,z T 0;令 x v s . 其中 v 为平台速度 .s 为慢时间变量( slowv aa. 式中B aa表示雷达的方位分辨率 B a 表示雷达方位向多谱勒带宽 . v a 表示方位向uuur R PT(x x T )2 (y y T )2 (z z T )2(1)time ).假设x T vs.其中 s表示SAR平台的x 坐标为x T 的时刻;再令r H2 y T2 表示目标与SAR的垂直斜距. 重写(1) 式为:图2:空间几何关系(a) 正视图(b) 侧视图图2(a) 中. Lsar表示合成孔径长度. 它和合成孔径时间Tsar的关系是Lsar vTsar。
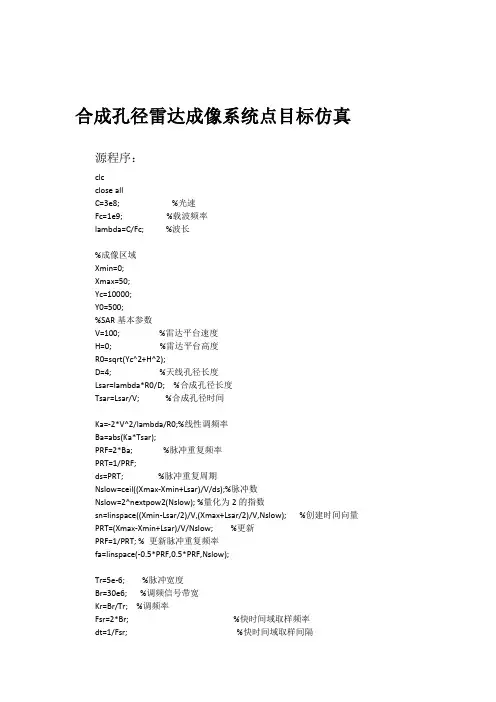
合成孔径雷达成像系统点目标仿真源程序:clcclose allC=3e8; %光速Fc=1e9; %载波频率lambda=C/Fc; %波长%成像区域Xmin=0;Xmax=50;Yc=10000;Y0=500;%SAR基本参数V=100; %雷达平台速度H=0; %雷达平台高度R0=sqrt(Yc^2+H^2);D=4; %天线孔径长度Lsar=lambda*R0/D; %合成孔径长度Tsar=Lsar/V; %合成孔径时间Ka=-2*V^2/lambda/R0;%线性调频率Ba=abs(Ka*Tsar);PRF=2*Ba; %脉冲重复频率PRT=1/PRF;ds=PRT; %脉冲重复周期Nslow=ceil((Xmax-Xmin+Lsar)/V/ds);%脉冲数Nslow=2^nextpow2(Nslow); %量化为2的指数sn=linspace((Xmin-Lsar/2)/V,(Xmax+Lsar/2)/V,Nslow); %创建时间向量PRT=(Xmax-Xmin+Lsar)/V/Nslow; %更新PRF=1/PRT; % 更新脉冲重复频率fa=linspace(-0.5*PRF,0.5*PRF,Nslow);Tr=5e-6; %脉冲宽度Br=30e6; %调频信号带宽Kr=Br/Tr; %调频率Fsr=2*Br; %快时间域取样频率dt=1/Fsr; %快时间域取样间隔Rmin=sqrt((Yc-Y0)^2+H^2);Rmax=sqrt((Yc+Y0)^2+H^2+(Lsar/2)^2);Nfast=ceil(2*(Rmax-Rmin)/C/dt+Tr/dt);Nfast=2^nextpow2(Nfast);tm=linspace(2*Rmin/C,2*Rmax/C+Tr,Nfast);dt=(2*Rmax/C+Tr-2*Rmin/C)/Nfast; %更新Fsr=1/dt;fr=linspace(-0.5*Fsr,0.5*Fsr,Nfast);DY=C/2/Br; %距离分辨率DX=D/2; %方位分辨率Ntarget=3; %目标数目Ptarget=[Xmin,Yc,1 %目标位置Xmin,Yc+10*DY,1Xmin+20*DX,Yc+50*DY,1];K=Ntarget; %目标数目N=Nslow; %慢时间采样数M=Nfast; %快时间采样数T=Ptarget; %目标位置%合成孔径回波仿真Srnm=zeros(N,M);for k=1:1:Ksigma=T(k,3);Dslow=sn*V-T(k,1);R=sqrt(Dslow.^2+T(k,2)^2+H^2);tau=2*R/C;Dfast=ones(N,1)*tm-tau'*ones(1,M);phase=pi*Kr*Dfast.^2-(4*pi/lambda)*(R'*ones(1,M));Srnm=Srnm+sigma*exp(j*phase).*(0<Dfast&Dfast<Tr).*((abs(Dslow)<Lsar/2)'*ones(1,M));end%距离压缩tr=tm-2*Rmin/C;Refr=exp(j*pi*Kr*tr.^2).*(0<tr&tr<Tr);%距离压缩参考函数F_Refr=fft((Refr));Sr=zeros(N,M);for k2=1:1:Mtemp1=fft(Srnm(k2,:));FSrnm=temp1.*conj(F_Refr);Sr(k2,:)=ifft(FSrnm);end%方位压缩ta=sn-(Xmin+Xmax)/2/V;Refa=exp(j*pi*Ka*ta.^2).*(abs(ta)<Tsar/2); %方位压缩参考函数F_Refa=fft(Refa);Sa=zeros(N,M);for k3=1:1:Mtemp2=fft(Sr(:,k3));F_Sa=temp2.*conj(F_Refa.');Sa(:,k3)=fftshift(ifft(F_Sa));endrow=tm*C/2;col=sn*V;%绘图%回波雷达数据figure(1)subplot(211)imagesc(abs(Srnm));title('SAR data')subplot(212)imagesc(angle(Srnm))%灰度图figure(2)colormap(gray)imagesc(row,col,255-abs(Sr));title('距离压缩'),xlabel('距离向'),ylabel('方位向');figure(3)colormap(gray)imagesc(row,col,255-abs(Sa));title('方位压缩'),xlabel('距离向'),ylabel('方位向');%轮廓图figure(4)Ga=abs(Sa);a=max(max(Ga));contour(row,col,Ga,[0.707*a,a],'b');grid onx1=sqrt(H^2+min(abs(Ptarget(:,2))).^2)-5*DY;x2=sqrt(H^2+max(abs(Ptarget(:,2))).^2)+5*DY;y1=min(Ptarget(:,1))-5*DX;y2=max(Ptarget(:,1))+5*DX;axis([x1,x2,y1,y2])%三维成像图figure(5)mesh(Ga((400:600),(200:500)));axis tightxlabel('Range'),ylabel('Azimuth');仿真结果图:图4. 1 点目标原始回波数据图4. 2 距离压缩后成像图图4. 3 方位压缩后成像图(点阵目标成像灰度图)图4. 4 点阵目标成像轮廓图。

SAR成像BP算法仿真源程序及结果SAR(Synthetic Aperture Radar,合成孔径雷达)成像是一种利用合成孔径的技术,通过合成大尺寸天线阵列所接收到的多个回波信号,对地物进行成像的一种雷达成像技术。
背向散射点(Backscatter Point,BP)是其中的一个重要概念,指的是雷达波束照射到地物上的一个点,接收到的回波信号。
BP算法可以通过计算背向散射点的位置和回波信号的相位差,实现对地物的成像。
下面是一个SAR成像BP算法的仿真源程序及结果。
为了简化问题,我们假设只有一个背向散射点,并且坐标为(0,0)。
```pythonimport numpy as npimport matplotlib.pyplot as plt#设置成像区域的大小和分辨率range_bins = 1000 # 距离向像元数azimuth_bins = 1000 # 方位向像元数range_resolution = 1 # 距离分辨率azimuth_resolution = 1 # 方位分辨率#构造回波信号target = np.array([[0]]) # 背向散射点target_amplitude = 1 # 背向散射点的幅度target_phase = np.pi / 4 # 背向散射点的相位#构造合成孔径雷达的波束beam = np.zeros((azimuth_bins, range_bins)) # 保存波束数据for r in range(range_bins):for a in range(azimuth_bins):#计算距离和方位range_distance = r * range_resolutionazimuth_distance = a * azimuth_resolution#计算背向散射点到波束位置的相位差phase_difference = 4 * np.pi / wavelength *(range_distance**2 + azimuth_distance**2)#计算波束位置的回波信号beam[a, r] = target_amplitude * np.exp(1j * (target_phase + phase_difference))# 对波束进行逆快速傅里叶变换(Inverse Fast Fourier Transform, IFFT)image = np.fft.ifft2(beam)#显示成像结果plt.imshow(np.abs(image), cmap='gray', extent=[0, range_bins * range_resolution, 0, azimuth_bins * azimuth_resolution])plt.colorbarplt.title('SAR Image')plt.xlabel('Range (m)')plt.ylabel('Azimuth (m)')plt.show```以下是对上述源程序的分析:1. 我们首先需要设置成像区域的大小和分辨率,即range_bins和azimuth_bins。
学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
本人完全意识到本声明的法律后果由本人承担。
作者签名:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保障、使用学位论文的规定,同意学校保留并向有关学位论文管理部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权省级优秀学士学位论文评选机构将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
本学位论文属于1、保密□,在_________年解密后适用本授权书。
2、不保密□。
(请在以上相应方框内打“√”)作者签名:年月日导师签名:年月日目录摘要.................................................. ()关键词................................................ ()一、绪论.............................................. ()引言............................................. ()研究目的和意义 (2)发展历史及学术动态................................. ()二、SAR的应用 ......................................... ()引言.............................................. ()合成孔径雷达在军事领域的应用 (3)战略应用 (3)战术应用 (3)特别应用 (3)合成孔径雷达在民用领域的应用 (3)在地形测绘和制图方面 (3)在海洋应用方面 (3)在水资源应用方面 (3)三、合成孔径雷达成像的原理 (3)成像特点 (3)成像原理 (4)成像流程图 (4)SAR成像理论模型 (5)四、SAR成像算 (5)引言 (5)距离——多普勒算法(RD) (5)信号模型及分析 (6)距离压缩 (7)距离移动校正 (7)方位向压缩 (9)CS算法 (9)算法特点简介 (10)SAR 斜视回波模型 (10)SAR 斜视回波几何模型 (10)距离移动分析 (11)改进的CS算法 (11)五、算法的Matlab仿真 (11)RD算法 (11)仿真参数 (11)仿真结果 (12)仿真结果说明 (13)CS算法 (13)仿真参数 (14)仿真结果 (15)仿真性能分析 (16)六、成像算法对分辨率的影响 (17)多普勒中心频率误差 (17)多普勒调频误差 (16)改进型算法的多普勒参数估计与设定 (17)七、总结 (18)致谢 (18)参考文献 (18)附录 (20)合成孔径雷达点目标成像仿真学生:宋家明指导老师:黄瑶三峡大学理学院摘要:本文主要介绍合成孔径雷达(SAR)点目标成像的相关知识,简要介绍了SAR在军事和民事中的运用,阐述了其成像原理及特点。
摘要现代雷达系统日益变的复杂,难以简单直观的进行分析,必须借助计算机来完成对系统的各项功能和性能的仿真。
针对现代雷达信号处理的主要方式,运用数字信号处理理论和Matlab 软件研究雷达信号处理的仿真问题,提出了一个仿真模型。
该模型可以完成雷达信号的仿真、热噪声与杂波的产生和雷达系统中信号的动态处理过程。
用Matlab 对某脉冲压缩雷达信号处理系统进行了仿真,得到了雷达系统中各个处理点上的具体信号形式,既包含幅度信息,又包含相位信息,该模型能较好地满足对雷达信号处理的仿真要求,显示了用Matlab仿真雷达信号处理系统的方便、快捷的优雷达点。
本文讨论的是雷达信号处理部分,并结合雷达处理系统实例来说明MATLAB在雷达信号处理机系统仿真中的应用。
关键词:雷达信号处理;正交解调;脉冲压缩;回波积累;恒虚警处理AbstractModern radar systems become increasingly complex and difficult to simple intuitive analysis, we must rely on computer systems to complete the functionality and performance of the simulationThe simulation of radar signal processing is an important part of the simulation of radar system. This paper introduces a method of the simulation of radar signal processing based on Matlab, including the simulation ofradar echo and clutter, and researches the simulation method of important technologies in the radar signal processing, including quadrature sampling, pulse compression, echo accumulation and CFAR detector. The work inthis paper can overcome the disadvantages such as difficulty and lengthiness and show the convenience and simplicity of the simulation of radar signal processing based on MATLAB.In this paper, is part of the radar signal processing and radar processing systems with examples to illustrate the radar signal processor MATLAB simulation of。
SAR 成像1 合成孔径雷达(SAR1。
1 SAR 简介合成孔径雷达(SAR是一种可以全天候、全天时工作的高分辨率成像雷达。
它利用天线和目标之间相对运动而形成等效合成孔径,解决了雷达设计中高分辨率与大尺寸天线和短工作波长之间的矛盾,在遥感和国防中潜在着极大的应用价值。
星载SAR 一般工作在正侧视状态,但在特殊应用中,也会工作在斜视状态.图1给出了星载SAR 正侧视模式的空间几何关系.飞行路径在地面上的投影(地面轨迹方向称为方位方向,而与其垂直的方向称为距离方向。
距离向使用脉冲压缩技术实现高分辨率;方位向利用多普勒效应,经过相干处理得到高分辨率。
图1 SAR 的几何关系1.2 SAR 信号模型:SAR 信号可以分为距离向信号和方位向信号。
首先考虑SAR 距离向信号。
SAR 距离像脉冲可表示为:((20(cos 2r rs rect f K T ττπτπτ=+ (1.2.1其中,r T 为脉冲持续时间,r K 为距离向昧冲的调频率,0f 为中心频率,τ以脉神中心为参考原点。
任一照射时刻的反射能量脉冲波形和照射区域内地面反射系数r g 的卷积,如下所示:(((r r s g s τττ=⊗(1.2.2 考察距雷达0R 处的一个目标点,其后向散射系数0σ的幅度为A ,则式(1.2。
2中的(02r g A R c δτ=-,其中c 为光速,02R c 为该点的信号延时.所以可知,该点目标的接收信号为:((((200002(cos 222r r rR cs Arect f R c K R c T ττπτπτφ-=-+—+(1。
2。
3其中,φ表示地表散射过程可能引起的首达信号相位改变。
现在考虑方位向信号。
由于大多数SAR 天线在方位面内没有加权,其单程方向图可以近似为一个sin c 函数:(0。
886sin a bwP c θθβ⎛⎛≈⎛⎛⎛(1。
2.4 其中θ为斜距平面内测得的与视线的夹角,bw β方位向波束宽度0.886a L θλ,a L 为方位向天线长度.由于雷达能量的双程传播过程,接收信号的强度由式(1。
合成孔径雷达matlab摘要:一、合成孔径雷达简介- 合成孔径雷达的定义- 合成孔径雷达的工作原理- 合成孔径雷达的应用领域二、MATLAB 在合成孔径雷达中的应用- MATLAB 在合成孔径雷达数据处理中的作用- MATLAB 在合成孔径雷达图像生成中的作用- MATLAB 在合成孔径雷达性能评估中的作用三、MATLAB 合成孔径雷达实例- 基于MATLAB 的合成孔径雷达数据处理实例- 基于MATLAB 的合成孔径雷达图像生成实例- 基于MATLAB 的合成孔径雷达性能评估实例正文:一、合成孔径雷达简介合成孔径雷达(Synthetic Aperture Radar, SAR)是一种高分辨率微波成像雷达,通过利用雷达与目标的相对运动,将尺寸较小的真实天线孔径用数据处理的方法合成一较大的等效天线孔径,从而实现高分辨率图像的生成。
合成孔径雷达具有分辨率高、全天候工作、能有效识别伪装和穿透掩盖物等优点,广泛应用于航空测量、航空遥感、卫星海洋观测、航天侦察、图像匹配制导等领域。
二、MATLAB 在合成孔径雷达中的应用1.MATLAB 在合成孔径雷达数据处理中的作用MATLAB 在合成孔径雷达数据处理中发挥着重要作用。
它可以帮助处理合成孔径雷达采集到的原始数据,包括数据预处理、数据滤波、数据插补等,从而提高数据质量,为后续的图像生成和性能评估提供有效支持。
2.MATLAB 在合成孔径雷达图像生成中的作用MATLAB 具有强大的图像处理功能,可以用于生成合成孔径雷达图像。
利用MATLAB 可以对合成孔径雷达数据进行逆合成孔径雷达成像处理,从而得到目标区域的清晰图像。
同时,MATLAB 还可以实现图像的优化和增强,以满足不同应用场景的需求。
3.MATLAB 在合成孔径雷达性能评估中的作用MATLAB 可以用于评估合成孔径雷达的性能参数,例如占地面积、方位角和距离分辨率、信噪比(SNR)和噪声等效反射率(NER)。
SAR图像自动目标识别算法研究的开题报告一、选题意义合成孔径雷达(Synthetic Aperture Radar,SAR)具有在任何天气条件下获取地表信息的能力,被广泛应用于海洋、军事、城市管理、环境保护等领域。
SAR图像的目标识别一直是该领域的研究热点。
传统的目标识别方法主要是手动分析方式,需耗费大量人力、物力和时间。
而基于计算机视觉的自动目标识别方法可以大大提高识别的准确性和效率,具有较高的实用价值和广阔的应用前景。
二、研究内容本研究拟研究SAR图像自动目标识别算法,具体内容包括:1. SAR图像特征提取:基于图像的特征和纹理特征提取方法,对SAR图像进行特征提取,以寻找目标区域。
2. 目标检测与分类:在SAR图像中,采用滑动窗口检测法和深度学习算法,对目标区域进行检测,同时利用支持向量机(SVM)等对目标进行分类。
3. 目标识别:基于目标分类结果,采用模板匹配算法等与已知目标模板进行匹配,识别出SAR图像中的目标,并对目标进行跟踪。
三、研究方法本研究将采用以下研究方法:1. 文献综述:对SAR图像目标识别算法进行深入的研究和综述,梳理相关算法的发展历程和应用情况。
2. 算法调研:分析和比较当前主流的SAR图像目标识别算法和技术,选择适合的方法。
3. 算法实现:采用Matlab、Python等编程语言,实现上述算法并进行测试。
4. 算法优化:针对算法实现过程中可能出现的问题,进行进一步的优化和改进。
四、预期成果预期实现以下成果:1. 完整的SAR图像自动目标识别算法,并可以应用于实际应用场景。
2. 实验数据集和结果:根据SAR图像的类型和目标种类,构建相应的数据集,对所研究算法的识别能力进行测试和评估。
3. 论文:在该领域的国内外主流期刊和会议上发表论文1篇。
五、研究时间表研究时间为两年,时间表如下:第一年1、完成文献综述和算法调研(2个月)2、实现SAR图像自动目标识别算法(6个月)3、采集SAR目标数据集,对算法进行测试(2个月)4、撰写论文工作(2个月)第二年1、根据测试结果,进一步完善和改进算法(4个月)2、继续撰写论文和投稿(6个月)3、完成毕业论文(2个月)六、可行性分析本研究基于SAR图像的自动目标识别算法,旨在实现目标识别的自动化,具有一定的应用前景和实际需要。
合成孔径雷达成像Matlab仿真研究作者:宋星秀曲毅王炳和来源:《现代电子技术》2014年第22期摘要:计算机仿真是现代雷达研究中的重要技术之一,针对合成孔径雷达(SAR)成像中影响仿真结果的因素,从分析SAR发射信号和回波信号模型出发,运用Matlab软件对SAR 的发射波形以及点目标成像进行了仿真,直观地反应了距离多普勒成像算法原理。
最终通过仿真分析,总结了SAR成像中影响仿真结果的5项因素,而这5项因素在运用Matlab仿真过程中对成像质量的优劣有着至关重要的影响。
关键词:合成孔径雷达; Matlab仿真;距离多普勒算法; Chirp中图分类号: TN957⁃34 文献标识码: A 文章编号: 1004⁃373X(2014)22⁃0017⁃03 Study on Matlab simulation of synthetic aperture radar imagingSONG Xing⁃xiu, QU Yi, WANG Bing⁃he(College of Information Engineering, Engineering University of Chinese Armed Police Force, Xi`an 710086, China)Abstract: Computer simulation is one of the important technologies in the modern radar study. Aiming at the factor which affects simulation results in synthetic aperture radar (SAR) imaging,Matlab software is used to simulate SAR transmission waveform and point target imaging to realize the analysis of SAR transmitted signal and echo signal model. It reflected the principle of distance Doppler imaging algorithm intuitively. Based on the simulation analysis, the five factors that affect SAR imaging simulation results are summarized, which has a critical influence on imaging quality in the Matlab simulation process.Keywords: synthetic aperture radar; Matlab simulation; range Doppler algorithm; Chirp合成孔径雷达(SAR)是成像领域中的一项核心技术,随着计算机技术与信号处理技术的不断进步,合成孔径雷达仿真技术也得以发展,由于仿真结果与实际结果的逼近,使得仿真成为现代雷达设计和研究的基础之一。