运动控制系统架构图
- 格式:pdf
- 大小:102.33 KB
- 文档页数:1
运动控制系统的组成
按照伺服机构的能源供给方式来划分,运动控制系统可以分为电动控制系统、气动控制系统和液压控制系统三种。
其中,液压伺服机构和气动伺服机构适用于要求防爆且输出力矩较大,控制精度要求较低的场合。
近年来,随着大功率力矩电机的出现,电动伺服机构的应用范围得到了进一步的拓展。
按照被控制量的性质来划分,运动控制系统可以分为位置控制系统、速度控制系统、加速度控制系统、同步控制系统、力矩控制系统等类型。
位置控制是将负载从某一确定的空间位置按照一定的轨迹移动到另一空间的位置,例如数控机床、搬运机械手和工业机器人。
速度控制和加速度控制是使负载按照某一确定的速度曲线进行运动,例如电梯通过速度和加速度调节实现平稳升降和平层。
很多速度控制系统的控制目标也包括位置,例如电梯控制系统,因此,速度控制在很多情况下是与位置控制等相互配合来工作的。
力矩控制系统是通过转矩的反馈来使输出转矩保持恒定或按某一规律变化,应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。
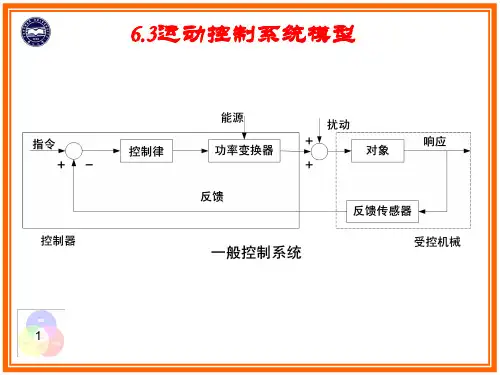
典型的运动控制系统如下图所示:
典型的运动控制系统结构图
根据伺服机构和机械装置运行情况是否反馈至控制器,运动控制系统又可。
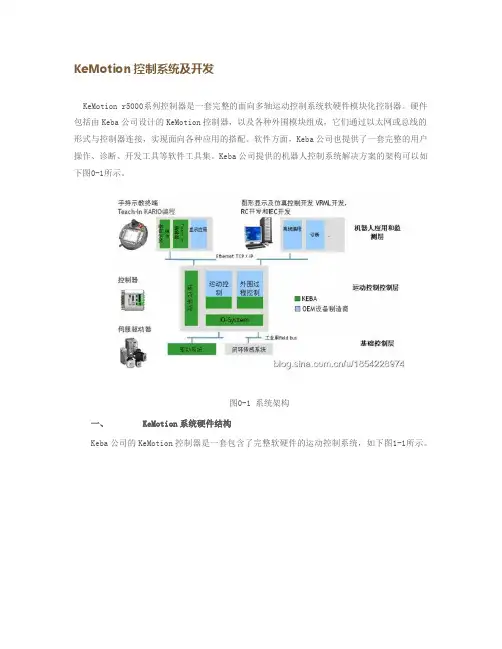
KeMotion控制系统及开发KeMotion r5000系列控制器是一套完整的面向多轴运动控制系统软硬件模块化控制器。
硬件包括由Keba公司设计的KeMotion控制器,以及各种外围模块组成,它们通过以太网或总线的形式与控制器连接,实现面向各种应用的搭配。
软件方面,Keba公司也提供了一套完整的用户操作、诊断、开发工具等软件工具集。
Keba公司提供的机器人控制系统解决方案的架构可以如下图0-1所示。
图0-1 系统架构一、KeMotion系统硬件结构Keba公司的KeMotion控制器是一套包含了完整软硬件的运动控制系统,如下图1-1所示。
图1-1 KeMotion控制器结构焊接机器人所使用的几个主要的模块如下所述:图1-2 CPU模块CPU:CPU部分是系统的核心目前焊接机器人使用的是KeMotion r5000系列的CP252/X CPU 模块(如图1-2,使用的是定制的基于Intel x86嵌入式微处理器),其上运行的是VxWorks实时操作系统。
控制器带有CF卡,OS和应用软件以及系统的数据都存在里面。
系统中同时安装了RC机器人控制系统和软PLC控制系统两套软件。
它们同时运行,通过共享内存块的方式进行通信。
RC部分负责运动控制,软PLC部分负责电气逻辑和实时外部信号采样处理工作,通过与RC通信,还可以扩展成为系统的主控部分,对运动控制过程进行控制。
KeDrive D2伺服驱动器:通过SERCOS III总线与控制器连接,系统采用的I/O模块是FX271/A SERCOS III 接口模块。
每个单元都可以独立控制伺服,包括位置、速度、加速度和电流的控制。
Ketop示教器手持终端(KeTop示教器,图1-4):其上运行的是基于WinCE的嵌入式系统,通过以太网与控制器连接通信,在局域网内有自己的IP,相当于一个独立的终端,由于是基于OS的所以可以使用路由连接,提供对TCP等协议的支持。
可以通过手持终端连接至控制器控制系统的运动,作为机器人操作手持设备,可以编写终端用户程序,对机器人示教操作、手动操作,监视运动状态。