机械手讲解PPT课件
- 格式:ppt
- 大小:2.63 MB
- 文档页数:30

epson机械手培训课件汇报人:2023-11-16•机械手概述•epson机械手基本操作•机械手高级操作技巧•机械手编程实例目•epson机械手调试与维护•epson机械手应用案例分析录机械手概述机械手定义机械手特点机械手定义与特点机械手起源机械手发展机械手的历史与发展机械手的应用范围工业领域01医疗领域02其他领域03epson机械手基本操作机械手编程语言简介RAPID编程语言RAPID编程语言基本结构机械手操作流程1. 打开电源,启动机械手控制系统。
2. 连接机械手与计算机,进行系统初始化。
6. 运行程序,观察机械手实际运行情况。
7. 记录数据,分析结果。
机械手操作规范1. 在进行机械手操作前,务必确保机械手及其周边环境的安全性。
2. 请勿在机械手运行时进行维护和调试。
3. 在使用机械手进行生产作业时,请严格按照操作规程执行,避免因误操作导致的事故。
基本指令1. MOVE:移动机械手到指定位置。
2. Pose:设置机械手的姿态(位置、角度)。
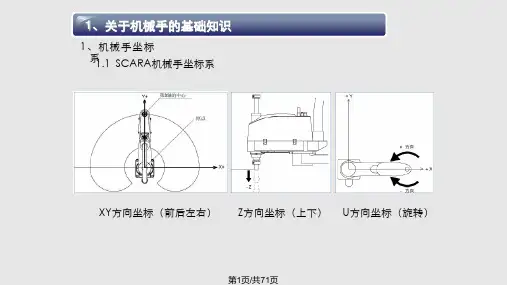
4. If5. GOTO1. 运动控制:可以实现直线插补、圆弧插补、旋转等运机械手高级操作技巧运动学基础介绍机械手运动学的基本原理,包括正运动学和逆运动学,以及机械手位姿的描述方法。
动力学基础介绍机械手动力学的基本原理,包括力和运动的关系,以及机械手动力学模型的建立方法。
机械手运动学与动力学基础机械手轨迹规划方法基于几何的轨迹规划介绍基于几何的机械手轨迹规划方法,如直线插补和圆弧插补等。
基于运动的轨迹规划介绍基于运动的机械手轨迹规划方法,如加速度和速度规划等。
介绍机械手速度控制的基本原理,如PID 控制器和模糊控制器等,以及实现方法。
加速度控制介绍机械手加速度控制的基本原理,如加速度限制和冲击限制等,以及实现方法。
速度控制机械手速度与加速度控制VS机械手编程实例确定搬运任务选择合适的机械手编写搬运程序程序调试与优化简单搬运程序编写编写装配程序程序调试与优化分析分拣任务根据任务特点选择适合的传感器型号。