第二章_机器人的机械结构分析
- 格式:ppt
- 大小:2.85 MB
- 文档页数:72



第二章工业机器人的机械结构和运动控制章节目录工业机器人的系统组成操作机控制器示教器工业机器人的技术指标学习目标导入案例课堂认知扩展与提高本章小结思考练习工业机器人的运动控制机器人运动学问题机器人的点位运动…机器人的位置控制课前回顾何为工业机器人?工业机器人具有几个显著特点,分别是什么?工业机器人的常见分类有哪些,简述其行业应用。
学习目标认知目标*熟悉工业机器人的常见技术指标*掌握工业机器人的机构组成及各部分的功能*了解工业机器人的运动控制能力目标*能够正确识别工业机器人的基本组成*能够正确判别工业机器人的点位运动和连续路径运动导入案例国产机器人竞争力缺失关键技术是瓶颈众所周知,中国机器人产业由于先天因素,在单体与核心零部件仍然落后于日、美、韩等发达国家。
虽然中国机器人产业经过 30 年的发展,形成了较为完善的产业基础,但与发达国家相比,仍存在较大差距,产业基础依然薄弱,关键零部件严重依赖进口。
整个机器人产业链主要分为上游核心零部件(主要是机器人三大核心零部件——伺服电机、减速器和控制系统,相当于机器人的“大脑”)、中游机器人本体(机器人的“身体”)和下游系统集成商(国内 95% 的企业都集中在这个环节上)三个层面。
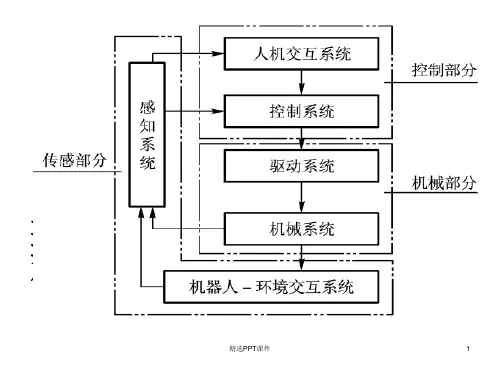
课堂认知工业机器人的系统组成第一代工业机器人主要由以下几部分组成:操作机、控制器和示教器。
对于第二代及第三代工业机器人还包括感知系统和分析决策系统,它们分别由传感器及软件实现。
工业机器人系统组成操作机操作机(或称机器人本体)是工业机器人的机械主体,是用来完成各种作业的执行机构。
它主要由机械臂、驱动装置、传动单元及内部传感器等部分组成。
关节型机器人操作机基本构造机器人操作机最后一个轴的机械接口通常为一连接法兰,可接装不同的机械操作装置,如夹紧爪、吸盘、焊枪等。
(1) 机械臂关节型工业机器人的机械臂是由关节连在一起的许多机械连杆的集合体。
实质上是一个拟人手臂的空间开链式机构,一端固定在基座上,另一端可自由运动,由关节 - 连杆结构所构成的机械臂大体可分为基座、腰部、臂部(大臂和小臂)和手腕 4 部分。
机器人的机械结构概述机器人的机械结构是指由各种零部件组成的,用于支撑机器人身体、传递运动和力量的框架和连接装置。
机械结构是机器人的基础,直接影响机器人的稳定性、灵活性和执行力。
本文将介绍机器人的机械结构的种类、设计原则和常用零部件。
机械结构种类机器人的机械结构可以分为刚性结构和柔性结构两种类型。
刚性结构刚性结构是指由刚性材料组成的,具有较高强度和刚度的结构。
刚性结构适用于需要精确运动和力量传递的场景。
常见的刚性结构包括铝合金框架、钢材支撑等。
刚性结构在机器人工业和军事领域广泛应用。
柔性结构柔性结构是指由弹性材料或具有一定弯曲能力的部件组成的结构。
柔性结构充分利用材料的柔韧性,可以实现机器人的柔软运动和机械灵活性。
常见的柔性结构包括聚合物弹性体、液体材料、软体机械构件等。
柔性结构适用于需要具有触觉、变形和适应性的场景。
设计原则机器人的机械结构设计需要考虑以下几个原则:1.强度和刚度:机械结构需要具有足够的强度和刚度,以承受机器人的运动、载荷和外界干扰。
在材料选择和结构设计上,需要考虑机械结构的受力分布和应力集中情况,以确保结构的稳定性和耐久性。
2.灵活性:机械结构需要具有一定的灵活性,以适应不同工作场景和任务需求。
灵活性可以通过使用柔性结构或可调节的连接件来实现。
同时,机械结构还应该考虑易于改装和扩展的设计,以便于后期功能的升级和增加。
3.重量和尺寸:机械结构应该尽可能轻量化和紧凑化,以减少机器人的整体重量和尺寸。
轻量化可以提高机器人的运动灵活性和功耗效率,同时降低机器人的成本和能源消耗。
4.可维护性和易装配:机械结构应该易于维护和维修,以减少机器人的停机时间和维护成本。
同时,机械结构应该采用模块化设计和标准化连接方式,以方便零部件的更换和装配。
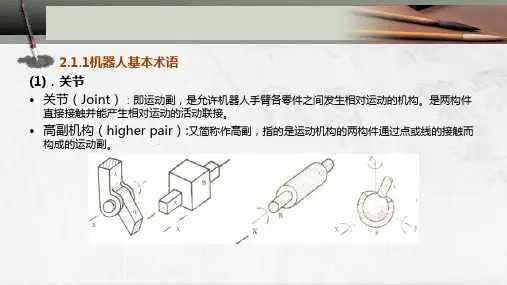
常用零部件机器人的机械结构由各种零部件组成,下面介绍几种常见的机器人零部件:关节关节是机器人运动的基本单元,通过关节的转动实现机器人的运动灵活性。
常见的关节类型包括旋转关节、平移关节、万向关节等。
机器人基础技术教学书机器人基础技术教学书第一章:机器人概述1.1 机器人的定义和分类1.2 机器人的发展历程1.3 机器人的应用领域第二章:机器人的机械结构2.1 机器人的基本结构和组成部件2.2 机器人的关节类型和运动方式2.3 机器人的传感器和执行器第三章:机器人的感知与认知3.1 机器人的感知技术3.1.1 视觉传感器3.1.2 声音传感器3.1.3 触觉传感器3.2 机器人的认知技术3.2.1 环境建模与感知分析3.2.2 机器人的自主导航与定位第四章:机器人的控制与决策4.1 机器人的控制系统4.1.1 开环控制与闭环控制4.1.2 反馈控制与前馈控制4.2 机器人的路径规划与运动控制4.3 机器人的决策与智能算法4.3.1 强化学习算法4.3.2 遗传算法4.3.3 模糊控制算法第五章:机器人的人机交互与协作5.1 机器人的语音识别和语音合成技术5.2 机器人的自然语言理解和生成技术5.3 机器人的姿态识别和情感分析技术5.4 机器人的协作与协同技术第六章:机器人的安全与伦理6.1 机器人的安全保障措施6.1.1 硬件安全:碰撞检测与防护装置6.1.2 软件安全:权限控制与隐私保护6.2 机器人的伦理问题与社会影响6.2.1 机器人的道德规范和法律法规6.2.2 机器人的就业和人类替代性第七章:机器人的未来发展与应用展望7.1 机器人技术的发展趋势7.2 机器人在工业制造领域的应用展望7.3 机器人在医疗卫生领域的应用展望7.4 机器人在农业和服务领域的应用展望结语:机器人基础技术的学习与应用通过本书的学习,读者将掌握机器人的基本概念和分类,了解机器人的机械结构和组成部件,熟悉机器人的感知与认知技术,了解机器人的控制与决策方法,掌握机器人的人机交互与协作技术,了解机器人的安全与伦理问题,并展望机器人技术的未来发展与应用前景。
通过学习,读者将能够在机器人相关领域进行研究和创新,为推动机器人技术的发展做出贡献。