PMAC770_MODBUS通讯协议V2.4(客户版)-140717
- 格式:doc
- 大小:1.57 MB
- 文档页数:45

umek欢迎您选购MTG2000 产品深圳鼎信通达股份有限公司为客户提供全方位的技术支持,用户可与就近的鼎信通达分公司联系,也可直接与公司总部联系。
客服联系方式:地址:深圳市南山区常兴路国兴大厦9 楼电话:*************传真:*************邮编:518057网址:, 声明1.MTG2000 产品为深圳鼎信通达股份有限公司自主研发的通信和网络产品,该手册中包含的所有内容,包括但不限于文字表述、图标、图表、页面设计、数据等等均享有完整的著作权、专利权和商标权等相关权利,并受《中华人民共和国著作权法》、《中华人民共和国商标法》、《中华人民共和国专利法》等相关法律法规和中国加入的所有知识产权方面的国际条约、国际公约的保护。
2.未经深圳鼎信通达股份有限公司的书面授权许可,任何单位、组织或个人不得以任何目的、使用任何形式或方法擅自对本手册进行抄袭、翻译等违法侵权行为,否则深圳鼎信通达股份有限公司将追究其法律责任,特此郑重声明!3.本公司保留对本手册中所描述的产品进行改进的权利,手册中涉及的图片及文字等内容解释如有出入,请以最终实际系统为准。
4.由于产品版本升级或其它原因,本手册内容会不定期更新,恕不另行通知。
关于本文档本文档主要描述MTG2000 产品的外观、功能特性、配置及维护操作方法。
适用对象本手册适合下列人员阅读:●安装维护工程师●技术支持工程师●相关技术和市场人员修订记录目录1设备介绍 (5)1.1概述 (5)1.2外观描述 (6)1.2.1正面图 (6)1.2.2RJ-48C 线序 (7)1.3功能和特点 (7)1.3.1支持的协议 (7)1.3.2系统功能 (7)1.3.3支持的工业标准 (8)1.3.4硬件说明 (8)2.参数配置 (9)2.1登录 (9)2.1.1查看或更改设备IP (9)2.1.2登录 (9)2.2W EB 界面结构和导航树 (10)2.3运行信息 (12)2.3.1系统信息 (13)2.3.2 E1/T1 状态 (14)2.3.3PSTN 中继状态 (15)2.3.4IP 中继状态 (15)2.3.5PRI 呼叫统计 (16)2.3.6SS7 呼叫统计 (16)2.3.7SIP 呼叫统计 (17)2.4网络配置 (17)2.5PRI 配置 (18)2.5.1PRI 参数 (18)2.5.2PRI 中继 (19)2.6SS7 配置 (20)2.6.1SS7 中继 (20)2.6.2SS7 链路 (22)2.6.3SS7 电路 (23)2.6.4SS7 电路维护 (23)2.7PSTN 分组配置 (25)2.7.1时钟源 (25)2.7.2 E1/T1 参数 (25)2.7.5拨号超时 (29)2.7.6PSTN 规则 (30)2.7.7PSTN 分组 (31)2.7.8PSTN 分组管理 (31)2.8SIP 配置 (32)2.8.1SIP 参数 (32)2.8.2SIP 中继 (32)2.9IP 分组配置 (34)2.9.1IP 规则 (34)2.9.2IP 分组 (35)2.9.3IP 分组管理 (36)2.10号码过滤 (36)2.10.1主叫白名单 (36)2.10.2主叫黑名单 (37)2.10.3被叫白名单 (37)2.10.4被叫黑名单 (37)2.10.5主叫号码池 (37)2.10.6过滤规则 (38)2.11呼叫路由 (38)2.11.1路由参数 (38)2.11.2PSTN->IP 路由 (39)2.11.3PSTN->PSTN 路由 (40)2.11.4IP->PSTN 路由 (40)2.11.5IP->IP 路由 (41)2.12号码变换 (43)2.12.1PSTN->IP 被叫号码 (43)2.12.2PSTN->IP 主叫号码 (44)2.13语音&传真 (47)2.14 维护 (48)2.14.1参数管理 (48)2.14.2数据备份 (49)2.14.3数据恢复 (49)2.14.4语音模板信息 (49)2.14.5版本信息 (50)2.14.6信令呼叫测试 (50)2.14.7网络抓包 (52)2.14.8软件升级 (52)2.14.9密码修改 (54)2.14.10重启设备 (54)3常见问题 (55)3.1如果修改或忘记了IP 地址如何重新获得? (55)1设备介绍1.1概述MTG2000 是一款基于嵌入式操作系统针对运营商和呼叫中心设计的媒体中继网关,它是语音IP 化改造和NGN 解决方案的重要组成部分,它位于IP 语音网络的边缘接入层,连接PSTN 和VoIP 网络,实现IP 到TDM 转换功能。
通信协议 ——读卡器通讯协议文件标识:MT-YF-20110223 当前版本: 1.0作 者:Lii 深圳市铭特科技有限公司 文件状态: [√] 草稿 [ ] 正式发布 [ ] 正在修改完成日期:2011-2-23目录目录 (2)一、更改记录 (3)二、规约定义 (4)2.1、通讯格式 (4)2.2、通讯数据帧格式 (4)2.3、STX和ETX (4)2.4、长度<LENGTH> (5)2.5、命令字 (5)2.6、命令参数 (5)2.7、返回状态字 (5)2.8、数据 (6)2.9、BCC数据异或校验 (6)三、读卡器 (7)3.1、读卡器输出信息需求 (7)3.1.1、用户卡/充值卡 (7)3.2、读卡器详细命令 (7)3.2.1、寻卡 (7)3.2.2、识别卡类型并认证 (8)3.2.3、开始加电 (9)3.2.4、结束加电 (10)3.2.5、弹卡 (11)3.2.6、SIM卡位置选择 (12)四、附录 (13)4.1、参考文件 (13)4.2、其他信息 (13)一、更改记录版本/状态作者参与者起止日期备注新建读卡器通信协议1.0/N Lii 2011-2-23N-->新建M-->修改A -->添加二、规约定义本读卡器通讯协议在铭特科技MT318充电桩读卡器通讯协议V1.0基础上更改而来,该协议为读卡器与充电控制器之间的应用通信协议。
2.1、通讯格式采用RS232、全双工通讯方式,读卡器接收到完整数据包10ms后响应。
波特率: 9600、数据格式: 1位起始位,8位数据位,1位停止位。
2.2、通讯数据帧格式表2.1数据包定义格式序号字节数1 1 STX2 2 长度<LENGTH>3 1 命令字4 1 命令参数数据5 LENGTH-26 1 ETX7 1 BCC各字节定义详细请参考以下几节说明。
表2.2卡机返回数据包定义格式序号字节数说明1 1 STX2 2 长度<LENGTH>3 1 命令字4 1 命令参数5 1 状态字数据6 LENGTH-27 1 ETX8 1 BCC2.3、STX和ETX定义发送开始字节STX<x02>和ETX<0x03>2.4、长度<LENGTH>发送长度<LENGTH>:长度<LENGTH>=命令字<1>+命令参数<1>+数据< LENGTH -2> 接收长度<LENGTH>:长度<LENGTH>=命令字<1>+命令参数<1>+状态字<1>+数据< LENGTH -2>2.5、命令字命令字: 0x51---对ESAM和卡操作的命令0x32---对读卡器弹卡操作的命令发送和返回的命令字一样。

华光电⽓综保Modbus规约V7.0(1)CSR-03系列综保装置MODBUS通讯规约V2.01.通讯参数和传输特性传输⽅式:异步串⾏通信⽅式。
MODBUS规约模式:RTU模式。
传输速率:2400 bps,4800bps,9600bps。
串⾏⼝通讯数据格式:1 个起始位,8 个数据位, ⽆校验位,1个停⽌位。
最⼤传输距离:1200⽶。
通讯介质:推荐采⽤0.5mm的双绞线,不带屏蔽层。
(原因是如果使⽤屏蔽双绞线,但现场接地处理不好反⽽影响通讯质量)。
⽹络连接主站数⽬:1个。
⽹络连接从站数⽬:最多31个。
应答时间:⼩于4.5个byte传输时间(帧间隔最⼩时间) + 10ms。
2.⽹络连接RS-485⽹络的匹配电阻选取:双绞线⽹络两端的匹配电阻选取,以现场通信正常为准,⼀般地1.2km时取120Ω,600m时取220Ω,300m时取330Ω,如通信误码率较⼤,观察通信时的波形,匹配电阻做适当改变:末端匹配电阻合适末端匹配电阻偏⼩末端匹配电阻偏⼤3.通信参数选择通信站号:在通讯参数中修改装置地址,范围1~99,禁⽌使⽤0作为装置地址,地址0作为⼴播地址使⽤。
通信波特率: 通讯参数中修改装置485⼝,修改通信波特率:选择范围: 2400bps, 4800bps,9600bps。
4.MODBUS协议通⽤格式4.1 ⽀持的MODBUS功能码功能码02H: 读取开关量输⼊(读实遥信和虚遥信)。
功能码03H: 读取保持寄存器(读事件记录等)功能码04H: 读取输⼊寄存器(读远动遥测)功能码05H: 强制单点继电器输出(远⽅复归)。
功能码06H: 向保持寄存器写单个字(遥控跳闸、遥控合闸的选择和执⾏操作)功能码10H: 向保持寄存器(内存区)写多个16位的字(通讯对时)。
4.2 异常响应报⽂格式由于软件编程错误,对协议理解错误或通讯⼲扰等原因,MODBUS 通信⼦站接收到主站的报⽂后,可以采⽤异常响应报⽂给予回答,异常响应报⽂格式举例如下:⼦站通过校验,发现主站报⽂有问题,将响应报⽂将主站的功能码最⾼位(D7)置1,如例4.3 时间格式本规约中使⽤到的对时报⽂的时间格式,事件记录中的时间格式,参见下⾯说明。
一、和PMAC卡建立通讯步骤1)在计算机系统中安装PEWIN32PRO软件。
2)在计算机系统中添加硬件设备驱动程序。
a)进入控制面板选择“添加硬件”图标b)根据提示进入到“已安装的硬件”列表,选择“添加新的硬件设备”c)选择手动从列表选择硬件d)在常见硬件类型中选择“显示所有设备”e)在厂商栏中选择“Delta Tau Data Systems”;在型号栏中选择“PMAC ISA Motion Controller”(注:如提示缺少文件可在C:\WINDOWS\SYSTEM32\DRIVERS\下找到)。
f)在控制面板中进入“系统”中的“设备管理器”,找到PMAC ISA Motion Contrller 进入其属性界面,点击“资源”页。
取消“使用自动设置”,点击“更改设置”将输入/输出范围值改为0210-021F。
确定。
g)重新启动计算机3)运行PEWIN32PRO软件,选择菜单栏中Setup->General Setup and Options 在对话框中点击“Select”在PMAC Devices 对话框中点击“Insert…”;选择“PMAC ISA0, Port: 0×210,Intr: N/A”点击“OK”键。
返回“PMAC Devices”对话框点击“Test”显示“The PMAC was successfully detected”此时已经和PMAC卡建立通讯。
依次点击“确定”“OK”退至PEWIN32PRO主窗体。
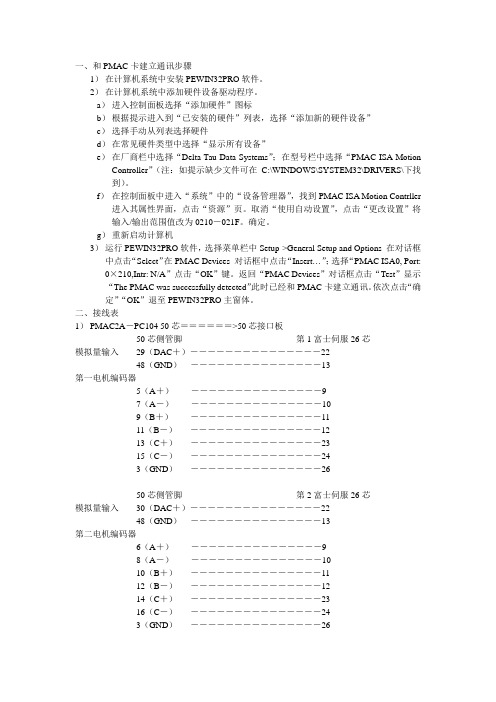
二、接线表1)PMAC2A-PC104 50芯======>50芯接口板50芯侧管脚第1富士伺服26芯模拟量输入29(DAC+)―――――――――――――――2248(GND)―――――――――――――――13第一电机编码器5(A+)―――――――――――――――97(A-)―――――――――――――――109(B+)―――――――――――――――1111(B-)―――――――――――――――1213(C+)―――――――――――――――2315(C-)―――――――――――――――243(GND)―――――――――――――――2650芯侧管脚第2富士伺服26芯模拟量输入30(DAC+)―――――――――――――――2248(GND)―――――――――――――――13第二电机编码器6(A+)―――――――――――――――98(A-)―――――――――――――――1010(B+)―――――――――――――――1112(B-)―――――――――――――――1214(C+)―――――――――――――――2316(C-)―――――――――――――――243(GND)―――――――――――――――2650芯侧管脚第3富士伺服26芯模拟量输入37(DAC+)―――――――――――――――2248(GND)―――――――――――――――13第3电机编码器17(A+)―――――――――――――――919(A-)―――――――――――――――1021(B+)―――――――――――――――1123(B-)―――――――――――――――1225(C+)―――――――――――――――2327(C-)―――――――――――――――243(GND)―――――――――――――――262)限位信号、回零信号PMAC2A-PC104 34芯======>34芯接口板34芯接口板管脚1 ―――――――――――――――+5~24V电源+V(1、2电机)3 ―――――――――――――――电源0V回零1 5 ――――――常开―――――――电源0V正限位1 7 ――――――常闭―――――――电源0V负限位1 9 ――――――常闭―――――――电源0V回零2 6 ――――――常开―――――――电源0V正限位2 8 ――――――常闭―――――――电源0V负限位2 10 ――――――常闭―――――――电源0V2 ―――――――――――――――+5~24V电源+V(3、4电机)4 ―――――――――――――――电源0V回零3 19 ――――――常开―――――――电源0V正限位3 21 ――――――常闭―――――――电源0V负限位3 23 ――――――常闭―――――――电源0V回零4 20 ――――――常开―――――――电源0V正限位4 22 ――――――常闭―――――――电源0V负限位4 24 ――――――常闭―――――――电源0V三参数设定模拟量方式:I100=1 I200=1 I300=1 I400=1I125=$52C000I225=$52C008I325=$52C010I425=$52C018I900=1001I901=2I902=3I10=1710933I169=1024 I269=1024 I369=1024 I469=1024I130~I135 PID参数I910 、I920、I930、I940 缺省设为7 如果反馈反了请改为3 四供电电源总线方式通讯,不需要接电源。

武汉普天监控模块通信协议
(ModBus版)
一、简介
本文介绍计算机与武汉普天监控模块之间的通信协议,本协议依照Modbus通信协议(GB/Z 19582.1-2004)规范的制定。
本协议适用于武汉普天监控模块所监控的开关电源系统。
本通信协议的知识产权和本文的版权为武汉普天电源有限公司所有,请使用本通信协议的单位注意保密,对侵害本版权的行为,武汉普天电源有限公司将依法追究其法律责任。
二、通信协议基础部份
⑴通信接口和传输速率
智能设备通信协议采用异步串行通信方式。
本监控通信速率设置为:9.6KBPS,通信传输格式为:起始位1位,数据位8位,停止位1位,无校验。
三、信息格式及相关说明
(1)协议基本格式
命令信息:
响应信息:
错误信息:
(2)相关说明
四、通信协议
(1)A larm1详细说明:
(2)A larm2详细说明:
(3)数据单位说明:
Batt Temp 和Amb Temp 的有效范围是:-10~90℃,若温度超出此范围应认为是温度传感器未安装。
(4)应该根据整流模块的实际个数来读取整流模块1-12的状
态
(5)S MR(1-12) Alarm1详细说明:
(6)S MR(1-12) Alarm2详细说明:。
WinCC OPC服务器配置1. OPC操作引言WinCC OPC服务器和OPC客户机之时的数据交换通过DCOM进行。
安装WinCC后,WinCC OPC服务器的DCOM设置正确。
如下情况设置必须改变:" 如果登记到OPC客户机或服务器计算机的用户没有管理员员限" 如果用不同于OPC客户机的帐号登记OPC服务器。
注意下列说明描述了授员OPC服务器的完整版本,没有考虑安全性需求。
这些设置允许通过OPC进行连接。
建议这些设置由网络管理员完成。
组组DCOM需要Windows 2000或Windows XP 网络技术的基础知识。
关于DCOM和许可的附加信息可以参见Windows 2000或Windows XP文档。
2、改变DCOM 设置引言安装WinCC后,WinCC OPC服务器的DCOM设置正确。
如下情况设置必须改变:" 如果登记OPC客户机或服务器计算机的用户没有管理员员限" 如果用不同于OPC客户机的帐号登记OPC服务器注意下列说明描述了授员OPC服务器的完整版本,没有考虑安全性需求。
这些设置允许通过OPC进行连接。
建议这些设置由网络管理员完成。
组组DCOM需要Windows 2000和Windows XP 网络技术的基础知识。
关于DCOM和许可的附加信息可以参见Windows 2000和Windows XP文档。
2.1 改变Windows 2000的DCOM 设置先决条件在OPC客户机计算机的用户管理器中,创建WinCC OPC服务器用于运行的用户帐号。
反过来,在OPC服务器计算机上建立客户机的用户帐号。
62 在线帮助的发行版步骤从开始菜单中选选“运行...”并输入“dcomcnfg.exe”。
显示“分布式COM组组属性”对对框。
2 选选“该用程序”标标并在列表中定位“OPCServer.WinCC”。
如果是WinCC OPC HDA服务器,必须使用条目“OPCHDAServers.WinCC”。
E72-2G4M23S1A产品规格书CC2630+PA+LNA ZigBee 6LoWPAN 无线模块第一章概述1.1 简介E72-2G4M23S1A是基于美国德州仪器(TI)生产的CC2630为核心自主研发的最大发射功率为100mW的小体积贴片型ZigBee、6LoWPAN无线模块,采用24MHz工业级高精度低温漂有源晶振。
CC2630芯片内部集成有 128KB 系统内可编程闪存和 8KB 缓存静态RAM(SRAM)与ZigBee、6LoWPAN无线通信协议,由于其内部具有独特的超低功耗传感器控制器,因此非常适合连接外部传感器。
在原有基础上内置了TI配套的射频范围扩展器CC2592,其内置了PA与LNA,使得最大发射功率达到100mW的同时接收灵敏度也获得进一步的提升,在整体的通信稳定性上较没有功率放大器与低噪声放大器的产品大幅度提升。
由于该模块是纯硬件类SoC模块,需要用户对其编程后方可使用。
1.2 特点功能⚫内置PA+LNA,理想条件下,通信距离可达1.5km;⚫最大发射功率100mW,软件多级可调;⚫内置ZigBee、6LoWPAN协议栈;⚫内置TI原装射频范围扩展器CC2592;⚫内置32.768kHz时钟晶体振荡器;⚫支持全球免许可ISM 2.4GHz频段;⚫内置高性能低功耗Cortex-M3与 Cortex-M0双核处理器;⚫丰富的资源,128KB FLASH,28KB RAM;⚫支持2.0~3.6V供电,大于3.3V供电均可保证最佳性能;⚫工业级标准设计,支持-40~+85℃下长时间使用;⚫双天线可选(PCB/IPX),用户可根据自身需求选择使用。
1.3 应用场景⚫智能家居以及工业传感器等;⚫安防系统、定位系统;⚫无线遥控,无人机;⚫无线游戏遥控器;⚫医疗保健产品;⚫无线语音,无线耳机;⚫汽车行业应用。
第二章规格参数2.1 极限参数主要参数性能备注最小值最大值电源电压(V)0 3.8 超过3.8V 永久烧毁模块阻塞功率(dBm)- 10 近距离使用烧毁概率较小工作温度(℃)-40 +85 工业级2.2 工作参数主要参数性能备注最小值典型值最大值工作电压(V) 1.8 3.3 3.8 ≥3.3V 可保证输出功率通信电平(V) 3.0 使用5V TTL 有风险烧毁工作温度(℃)-40 - +85 工业级设计工作频段(GHz) 2.402 - 2.480 支持ISM 频段功耗发射电流(mA)182.5 瞬时功耗接收电流(mA)11.1休眠电流(μA) 1.4 软件关断最大发射功率(dBm)22.6 23.0 23.2接收灵敏度(dBm)-100.5 -102.0 -103.5 空中速率为250kbps空中速率(bps)250k - 1M 用户编程控制主要参数描述备注参考距离1500m 晴朗空旷,天线增益5dBi,高度2.5米,空中速率250kbps 晶振频率24MHz/32.768KHz支持协议ZigBee封装方式贴片式接口方式 1.27mmIC全称CC2630F128RGZRFLASH 128KBRAM 28KB内核Cortex-M3+Cortex-M0外形尺寸17.5*33.5 mm天线接口PCB/IPEX 等效阻抗约50Ω第三章机械尺寸与引脚定义引脚序号引脚名称引脚方向引脚用途1、2、3 GND 地线,连接到电源参考地4 DIO_0 输入/输出通用IO口,传感器控制器(详见CC26xx 手册)5 DIO_1 输入/输出通用IO口,传感器控制器(详见CC26xx 手册)6 DIO_2 输入/输出通用IO口,传感器控制器(详见CC26xx 手册)7 DIO_3 输入/输出通用IO口,传感器控制器(详见CC26xx 手册)8 DIO_4 输入/输出通用IO口,传感器控制器(详见CC26xx 手册)9 DIO_5 输入/输出高驱动通用IO口,传感器控制器(详见CC26xx 手册)10 DIO_6 输入/输出高驱动通用IO口,传感器控制器(详见CC26xx 手册)11 DIO_7 输入/输出高驱动通用IO口,传感器控制器(详见CC26xx 手册)12 DIO_8 输入/输出通用IO口,详见CC26xx 手册)13 DIO_9 输入/输出通用IO口,详见CC26xx 手册)14 DIO_10 输入/输出通用IO口,详见CC26xx 手册)15 DIO_11 输入/输出通用IO口,详见CC26xx 手册)16 DIO_12 输入/输出通用IO口,详见CC26xx 手册)17 DIO_13 输入/输出通用IO口,详见CC26xx 手册)18 DIO_14 输入/输出通用IO口,详见CC26xx 手册)19 DIO_15 输入/输出通用IO口,详见CC26xx 手册)20 JTAG_TMS 输入/输出JTAG_TMSC, 高驱动能力(详见CC26xx 手册)21 JTAG_TCK 输入/输出JTAG_TCKC, 高驱动能力(详见CC26xx 手册)22 DIO_16 输入/输出高驱动通用IO口,JTAG_TDO(详见CC26xx 手册)23 DIO_17 输入/输出高驱动通用IO口,JTAG_TDI(详见CC26xx 手册)24 DIO_18 输入/输出通用IO口,详见CC26xx 手册)25 DIO_19 输入/输出通用IO口,详见CC26xx 手册)26 DIO_20 输入/输出通用IO口,详见CC26xx 手册)27 GND 地线,连接到电源参考地28 DIO_21 输入/输出通用IO口,详见CC26xx 手册)29 VCC 电源,1.8~3.8V30 DIO_22 输入/输出通用IO口,详见CC26xx 手册)31 DIO_23 输入/输出通用IO口,传感器控制器,数模(详见CC26xx 手册)32 nRESET 输入复位,低电平(详见CC26xx 手册)33 DIO_24 输入/输出通用IO口,传感器控制器,数模(详见CC26xx 手册)34 DIO_25 输入/输出通用IO口,传感器控制器,数模(详见CC26xx 手册)35 DIO_26 输入/输出通用IO口,传感器控制器,数模(详见CC26xx 手册)36 DIO_27 输入/输出通用IO口,传感器控制器,数模(详见CC26xx 手册)37 DIO_28 输入/输出通用IO口,传感器控制器,数模(详见CC26xx 手册)38 DIO_29 输入/输出通用IO口,传感器控制器,数模(详见CC26xx 手册)39 DIO_30 输入/输出通用IO口,传感器控制器,数模(详见CC26xx 手册)40、41、42 GND 地线,连接到电源参考地第四章基本操作4.1硬件设计⚫推荐使用直流稳压电源对该模块进行供电,电源纹波系数尽量小,模块需可靠接地;⚫请注意电源正负极的正确连接,如反接可能会导致模块永久性损坏;⚫请检查供电电源,确保在推荐供电电压之间,如超过最大值会造成模块永久性损坏;⚫请检查电源稳定性,电压不能大幅频繁波动;⚫在针对模块设计供电电路时,往往推荐保留30%以上余量,有整机利于长期稳定地工作;⚫模块应尽量远离电源、变压器、高频走线等电磁干扰较大的部分;⚫高频数字走线、高频模拟走线、电源走线必须避开模块下方,若实在需要经过模块下方,假设模块焊接在Top Layer,在模块接触部分的Top Layer铺地铜(全部铺铜并良好接地),必须靠近模块数字部分并走线在Bottom Layer;⚫假设模块焊接或放置在Top Layer,在Bottom Layer或者其他层随意走线也是错误的,会在不同程度影响模块的杂散以及接收灵敏度;⚫假设模块周围有存在较大电磁干扰的器件也会极大影响模块的性能,跟据干扰的强度建议适当远离模块,若情况允许可以做适当的隔离与屏蔽;⚫假设模块周围有存在较大电磁干扰的走线(高频数字、高频模拟、电源走线)也会极大影响模块的性能,跟据干扰的强度建议适当远离模块,若情况允许可以做适当的隔离与屏蔽;⚫通信线若使用5V电平,必须串联1k-5.1k电阻(不推荐,仍有损坏风险);⚫尽量远离部分物理层亦为2.4GHz的TTL协议,例如:USB3.0;⚫天线安装结构对模块性能有较大影响,务必保证天线外露,最好垂直向上。
通讯说明书恒温恒湿程序指示控制器TEMI2000 - SERIES1. 安全指示(注意)事项 (1)2. 通信仕样 (3)3. 通讯设定 (4)4. 通信的配线 (5)5. 通信指令 (7)6. MODBUS 规章 (18)7. D-REGISTER (24)▪ D-REGISTER 表 (49)TEMI2500采用半双工(Half-Duplex)方式的RS232C或RS485通讯接口,选择RS232C通讯时,可以与PC等上述通讯装备1:1通讯,选择RS485通讯时,上述通讯装备可与TEMI2500连接而使用,最多可连接31台TEMI2500。
█关于通讯设定的参数■出厂时,关于通讯参数的基本值在TEMI2500上,可以选择RS232C或RS485通讯接口来使用。
▶在[图1]中分离后盖,在电源板上可设定通讯的RS232C或者RS485跳线针中,选择一个而设定。
▶设定通讯时,利用镊子(其他用具等)将跳线帽插入所希望的通讯跳线针上就可以。
☞在跳线针上插入跳线帽之后,请一定要确认。
控制部后盖ⓑ拉扯TEMI2500与上方的通讯装备之间的接线,根据TEMI2500的通信设定(RS232C/RS485)有所不同,内容如下。
█ COM2端口的模块连接器引脚的示意图<█ COM2端口的模块连接器引脚说明RS232C█RS232C通讯的TEMI2500 6 Pin连接器连接█RS485通讯的TEMI2500 6 Pin连接器连接☞ SLAVE侧(TEMI2500)最多能接入31台Multidrop。
☞在通道两端的TEMI2500或者MASTER侧(PC, PLC等)上,必须接入终端电阻(200 1/4W)。
5. 通讯指令5.1 通讯指令的构成在上方的通讯设备里用TEMI2500传送通讯指令的基本形态如下。
①通讯指令开始文字用Ascii的文字STX(Start of Text)持代码值0x02,还表示通讯指令的开始。
CANopen Slave DeviceCAN-2017CApplication User’s ManualWarrantyWithout contrived damage, all products manufactured by ICP DAS are warranted in one year from the date of delivery to customers.WarningICP DAS revises the manual at any time without notice. However, no responsibility is taken by ICP DAS unless infringement act imperils to patents of the third parties.CopyrightCopyright © 2011 is reserved by ICP DAS.TrademarkThe brand name ICP DAS as a trademark is registered, and can be used by other authorized companies.Contents1Introduction (3)1.1Overview (3)1.2Hardware Specifications (4)1.3Features (5)1.4Application (5)2Hardware (6)2.1Structure (6)2.2Node ID & Baud Rate Rotary Switch (7)2.3LED Description (8)2.4PIN Assignment (9)2.5Wire Connection (10)3Application (11)3.1Object Dictionary (11)3.2Store and Restore Object (17)3.3Application Object (18)3.4Default PDO Mapping (19)3.5EMCY Communication (20)Appendix A: Dimension (21)Appendix B: Type Code Definition (22)1 Introduction1.1 OverviewCANopen is one kind of the network protocols based on the CAN bus and mainly used for embedded network system, such as industrial machine control , vehicle control system, factory automation, medical equipments control, remote data acquisition, environmental monitoring, and packaging machines control, etc.The CAN-2017C module follows the CiA DS-301 version 4.02 and DSP-401 version 2.1. It is easy to access the differential analog input status and set the configuration by using the standard CANopen protocol. The CAN-2017C has passed the validation of the CiA CANopen Conformance Test tool. Therefore, the provided EDS file is standard for any other standard CANopen masters. By using the 8-channel analog input and the CANopen masters of ICP DAS, you can quickly build a CANopen network to approach your requirements.1.2 Hardware SpecificationsAnalog Input:●Input Channels: 8●Input Type: ±10V, ±5V,±1V, ±500mV, ±150mV, -20mA ~ +20mA(External 125ΩResistor is Required)●Resolution: 16-bit●Accuracy: ±0.1% FSR●Sampling Rate: 10 Samples/ sec (Total)●Zero Drift: ±10μV/ °C●Span Drift: ±25 ppm/ °C●Common Mode Rejection: 86 dB●Normal Mode Rejection: 100 dB●Input Impedance: >2 MΩ●Over-voltage Protection: 240 Vrms●Individual Channel Configuration: Yes●Intra-module Isolation, Field to Logic: 3000 VDC●ESD Protection: ±4 kV Contact for each terminal.Others:●Power LED: PWR (red)●CANopen Status LED: RUN (green) / ERR (orange)●8 LEDs as Upper Limit Alarm Indicators●8 LEDs as Lower Limit Alarm Indicators●Power Supply: Unregulated +10 ~ +30 V.DC●Power Consumption: 2 W.●Operating Temperature: -25 ~ +75 °C.●Storage Temperature: -30 ~ +80 °C.●Humidity: 10 to 90% RH, Non-condensing.●Dimensions: 33 mm x 99 mm x 78 mm (W x L x H) Detail.1.3 Features●Standard CANopen general I/O slave devices.●CANopen Version: DS-301, v4.02.●Device Profile: DSP-401, v2.1●Provide 8 differential analog input channels.●CANopen transfer rate: 10 kbps, 20 kbps, 50 kbps, 125 kbps, 250kbps, 500 kbps, 800 kbps, 1000 kbps.●Maximum CANopen slave Node-ID up to 99.●Support NMT, PDO, SDO, EMCY, SYNC, Guarding, and Heartbeatprotocol.●Pass the validation of the CANopen Conformance Test●Provide EDS file for the CANopen master interfaces1.4 Application2 Hardware2.1 Structure(Top View) (Bottom View)2.2 Node ID & Baud Rate Rotary SwitchThe rotary switches for node ID configure the node ID of the CAN-2017C module. These two switches are for the tens digit and the units digit of node ID. The node ID value of this demo picture is 32.Node ID rotary switchThe rotary switch for baud rate handles the CAN baud rate of the CAN-2017C module. The relationship between the rotary switch value and the practical baud rate is presented in the following table.Baud rate rotary switchRotary Switch Value Baud rate (k BPS)0 101 202 503 1254 2505 5006 8007 1000Baud rate and rotary switch2.3 LED DescriptionThe CAN-2017C needs a 10 ~ 30 V Power LEDDC power supply. Under a normal connection, a good power supply and a correct voltage selection, as the unit is turned on, the LED will be lighted up in red.The Run LED indicates the CANopen operation state. The description of the LED state is shown below. About the details, please refer to the section 2.3.1 of the CAN-2000C user manual.Run LEDLED Signal State DescriptionOFF No power Power Supply is not ready Single Flash Stopped The device is in Stopped state Blinking Pre-operation Device is in pre-operational state Always ONOperationDevice is in operational stateThe Error LED indicates the CANopen error state. The description of the LED state is shown below. About the details, please refer to the section 2.3.2 of the CAN-2000C user manual.Error LEDLED Signal State DescriptionOFF No error Device is in working condition. Single Flash Error Warning At least one error of the CAN controller has occurred. Double Flash Guarding fail. Guard event happened. Always ONBus OffThe CAN controller is bus off.When the switch of the 120Ω terminator resistor is turned on, the terminal resistor LED will be lightening.Terminal Resistor LEDFirst all, the “Analog Input global interrupt enable(SDO: 6423h)” must be enabled. If the analog input is more or less than the value of the “Analog Input global interrupt Upper/Lower Limit Integer(SDO: 6424h/6425h)” of the channel, the Upper/Lower Limit Alarm LED of the channel will be lightening.Upper/Lower Limit Alarm LED2.4 PIN AssignmentCAN-2017C 20-pin Connector2.5 Wire Connection3 Application3.1 Object DictionaryIdxGeneral Communication Entries Sidx Description TypeAttr Default1000h 0h device type UNSIGNED 32 RO00040191h1001h 0h error registerUNSIGNED 8RO 0h 1003h 0h largest subindex supported for “predefine error field”UNSIGNED 8 RO0h 1h actual error (the newest one) UNSIGNED 32 RO--- ... .........--- 5h actual error (the oldest one) UNSIGNED 32 RO --- 1005h 0h COB-ID of Sync message UNSIGNED 32 RW80h 1008h 0h manufacturer device name VISIBLE_STRING RO CAN-2017C 1009h 0h manufacturer hardware version VISIBLE_STRING RO1.2 100Ah 0h manufacturer software version VISIBLE_STRINGRO 1.00-20111101 100Ch 0h guard time UNSIGNED 16 RW 0h 100Dh 0h life time factorUNSIGNED 8RW 0h 1010h 0h largest subindex supported for “store parameters”UNSIGNED 8 RO1h 1010h 1h save all hardware parameterUNSIGNED 32 RW--- 1011h 0h largest subindex supported for “restore default parameters”UNSIGNED 8 RO1h 1011h 1h restore all default parameters UNSIGNED 32 RW --- 1014h 0h COB-ID of EMCY UNSIGNED 32 RW 80h+x 1015h 0h Inhibit time of EMCY UNSIGNED 16 RW 0h 1017h 0h producer heartbeat timeUNSIGNED 16 RW0h 1018h 0h largest subindex supported for “identity object”UNSIGNED 8 RO4h1h vender ID UNSIGNED 32 RO 0000013Ch 2h product code UNSIGNED 32 RO 00002017h3h revision number UNSIGNED 32 RO ---4h serial numberUNSIGNED 32 RO---Note: x is Node-ID of the moduleIdxSDO Communication Entries SidxDescriptionTypeAttr Default 1200h 0h largest subindex supported for “server SDO parameter” UNSIGNED 8RO21h COB-ID form client to server (RxSDO) UNSIGNED 32 RO 600h+x2h COB-ID form server to client (TxSDO)UNSIGNED 32 RO 580h+xNote: x is Node-ID of the moduleIdx RxPDO Communication Entry Sidx DescriptionTypeAttr Default 1400h 0h Number of entries UNSIGNED 8RO2 1h COB-ID used by RxPDO UNSIGNED 32 RW 200h+x 2h Transmission type UNSIGNED 8 RW FFh 1401h 0h Number of entries UNSIGNED 8RO2 1h COB-ID used by RxPDO UNSIGNED 32 RW 300h+x 2h Transmission type UNSIGNED 8 RW FFh 1402h 0h Number of entries UNSIGNED 8RO2 1h COB-ID used by RxPDO UNSIGNED 32 RW 400h+x 2h Transmission type UNSIGNED 8 RW FFh 1403h 0h Number of entries UNSIGNED 8RO2 1h COB-ID used by RxPDO UNSIGNED 32 RW 500h+x 2h Transmission type UNSIGNED 8 RW FFh 1404h 0h Number of entries UNSIGNED 8RO2 1h COB-ID used by RxPDO UNSIGNED 32 RW C000 0000h 2h Transmission typeUNSIGNED 8 RW--- … … …… … … 1409h 0h Number of entries UNSIGNED 8RO2 1h COB-ID used by RxPDO UNSIGNED 32 RW C000 0000h2hTransmission typeUNSIGNED 8 RW---Note: x is Node-ID of the moduleIdx RxPDO Mapping Communication Entry Sidx DescriptionTypeAttrDefault 1600h 0h Number of entries UNSIGNED 8 RW 0 1601h 0h Number of entries UNSIGNED 8 RW 0 1602h 0h Number of entries UNSIGNED 8RW 0 … … …… … … 1609h0hNumber of entriesUNSIGNED 8RWIdx TxPDO Communication Entry Sidx DescriptionTypeAttr Default 1800h 0h Number of entries UNSIGNED 8 RO5 1h COB-ID used by TxPDO UNSIGNED 32 RW180h+x 2h Transmission type UNSIGNED 8 RW FFh 3h Inhibit time UNSIGNED 160 4h Reversed ------ --- 5h Event timer UNSIGNED 16 0 1801h 0h Number of entries UNSIGNED 8 RO5 1h COB-ID used by TxPDO UNSIGNED 32 RW280h+x 2h Transmission type UNSIGNED 8 RW FFh 3h Inhibit time UNSIGNED 160 4h Reversed ------ --- 5h Event timer UNSIGNED 16 0 1802h 0h Number of entries UNSIGNED 8 RO5 1h COB-ID used by TxPDO UNSIGNED 32 RW380h+x 2h Transmission type UNSIGNED 8 RW FFh 3h Inhibit time UNSIGNED 160 4h Reversed ------ --- 5h Event timer UNSIGNED 16 0 1803h 0h Number of entries UNSIGNED 8 RO5 1h COB-ID used by TxPDO UNSIGNED 32 RW480h+x 2h Transmission type UNSIGNED 8 RW FFh 3h Inhibit time UNSIGNED 160 4h Reversed ------ --- 5h Event timer UNSIGNED 16 0 1804h 0h Number of entries UNSIGNED 8 RO5 1h COB-ID used by TxPDO UNSIGNED 32 RW 8000 0000h2hTransmission typeUNSIGNED 8RW---3h Inhibit time UNSIGNED 16 0 4h Reversed ------ --- 5h Event timerUNSIGNED 160 … … …… … … 1809h 0h Number of entries UNSIGNED 8 RO5 1h COB-ID used by TxPDO UNSIGNED 32 RW 8000 0000h2h Transmission type UNSIGNED 8 RW --- 3h Inhibit time UNSIGNED 160 4h Reversed --- --- ---5hEvent timerUNSIGNED 16Note: x is Node-ID of the module Idx TxPDO Mapping Communication Entry Sidx DescriptionTypeAttrDefault 1A00h 0h Number of entries UNSIGNED 8 RO 0 1A01h 0h Number of entries UNSIGNED 8RO41h AI value of channel 0 UNSIGNED 32 RW 6401 0110h 2h AI value of channel 1 UNSIGNED 32 RW 6401 0210h 3h AI value of channel 2 UNSIGNED 32 RW 6401 0310h 4h AI value of channel 3 UNSIGNED 32 RW 6401 0410h 1A02h 0h Number of entries UNSIGNED 8RO41h AI value of channel 4 UNSIGNED 32 RW 6401 0510h 2h AI value of channel 5 UNSIGNED 32 RW 6401 0610h 3h AI value of channel 6 UNSIGNED 32 RW 6401 0710h 4h AI value of channel 7 UNSIGNED 32 RW 6401 0810h 1A03h 0h Number of entries UNSIGNED 8 RO 0 1A04h 0h Number of entries UNSIGNED 8 RO 0 1A05h 0h Number of entriesUNSIGNED 8RO0 … … …… …… 1A09h0hNumber of entriesUNSIGNED 8ROIdx AI Channel Type Code Function Sidx DescriptionTypeAttr Default 2004h 0h Number of entries UNSIGNED 8 RO 8 1h AI type code of channel 0UNSIGNED 8RW 8 … ……… …8hAI type code of channel 7UNSIGNED 8RW8Note: Please refer to “Appendix B” for all supported AI type codeIdx Analog Input Function Sidx DescriptionTypeAttr Default 6401h 0h Number of entries UNSIGNED 8 RO 8 1h The AI value of channel 0INTEGER 16RO -- … ……… …8hThe AI value of channel 7INTEGER 16RO--Note: Please refer to “Appendix B” for AI value rangeWhen the “AI global interrupt trigger enable(SDO: 6423h)” is enabled, CAN-2017C will start to feedback the TxPDO while the AI value reaches the conditions configured in the “AI interrupt trigger selection(SDO: 6421h).” Users can set up the upper limit, lower limit, and the delta for each AI channel by SDO: 6424h, 6425h and 6426h.Idx Analog Input Global Interrupt Trigger Enable Sidx DescriptionTypeAttr Default 6423h0hAnalog Input Global Interrupt Trigger EnableBooleanRWIdx Analog Input Interrupt Trigger Selection Sidx DescriptionTypeAttr Default 6421h 0h Number of entriesUNSIGNED 8RO8 1h AI interrupt trigger selectionof channel 0 UNSIGNED 8 RW7 … ………… 8hAI interrupt trigger selectionof channel 0UNSIGNED 8 RW7Bit no. Analog interrupt trigger selection 0 The AI value exceeds the upper limit 1 The AI value is less than the lower limit2 The change of the AI value is more than the delta3 to 7Reversed If you set the bit 0 of the interrupt trigger selection to 1, the CAN-2017C would feedback the AI value automatically while this AI value exceeds the upper limit. The eight Upper/Lower Limit Alarm Indicators on the panel ofCAN-2017C will be lightening respectively. By the way, if AI upper limit or lower limit leads CAN-2017C to send too many TxPDO messages in a quite short time, you could modify the Inhibit time of the TxPDO. It will change the minimum period between the consequent CAN messages, and the bigger Inhibit time value you set, the longer time period between the two TxPDO messages you get.Idx Analog Input Interrupt Upper Limit Integer Sidx DescriptionTypeAttr Default 6424h 0h Number of entries UNSIGNED 8 RO 8 1h AI upper limit of channel 0INTEGER 32RW -- … ……… …8hAI upper limit of channel 7INTEGER 32RW--Note: Please refer to “Appendix B” for AI upper limit rangeIdx Analog Input Interrupt Lower Limit Integer Sidx DescriptionTypeAttr Default 6425h 0h Number of entries UNSIGNED 8 RO 8 1h AI lower limit of channel 0INTEGER 32RW -- … ……… …8hAI lower limit of channel 7INTEGER 32RW--Note: Please refer to “Appendix B” for AI lower limit rangeIdx Analog Input Interrupt Delta Unsigned Sidx DescriptionTypeAttr Default 6426h 0h Number of entries UNSIGNED 8 RO 8 1h AI delta value of channel 0UNSIGNED 32RW 3E8h … ……… …8hAI delta value of channel 7UNSIGNED 32RW3E8hNote: These values are used to define the acceptable AI change ranges for each AI channels. The default for these values is 1000, and may have different range for the physical value because of the settings of the type code. Please refer to the appendix B for the type code definition.3.2 Store and Restore ObjectThe users can write the value 65766173h to object with index 1010h and subindex 1 to save the application setting, or write the value 64616F6Ch to object with index 1011h and subindex 1 and reboot the module to load the factory default. The following table lists the relative objects which will be stored or restored after writing these two objects. The factory default for these objects is also shown below.Index SubIndex Description FactoryDefault2004 h 1 ~ 8 AI type codes for channel 0~ 7 08h 6421 1 ~ 8 AI interrupt trigger selections for channel 0 ~ 7 07h 6423 0 AI global interrupt enable 0 6424 1 ~ 8 AI interrupt upper limits for channel 0 ~ 7 7FFFh 6425 1 ~ 8 AI interrupt lower limits for channel 0 ~ 7 E99Ah 6426 1 ~ 8 AI interrupt delta vlues for channel 0 ~ 7 3E8h 1400h 1 ~ 2 RxPDO1 parameter -- ... ... ... ... 1409h 1 ~ 2 RxPDO10 parameter -- 1600h 0 ~ 8 RxPDO1 mapping information -- ... ... ... ... 1609h 0 ~ 8 RxPDO10 mapping information -- 1800h 1 ~ 5 TxPDO1 parameter -- ... ... ... ... 1809h 1 ~ 5 TxPDO10 parameter --1A00h 0 ~ 8 TxPDO1 mapping information -- ... ... ... ...1A09h 0 ~ 8 TxPDO10 mapping information --3.3 Application ObjectThe users can read the object with index 6401h and subindex 1 ~ 8 to get the analog value of the channel 0 ~ 7, and the range for each AI type codes are listed in Appendix B. If the users wants to change the analog input type, write the type code to the object with index 2004h and subindex 1 ~ 8. For example, if the node ID of CAN-2017C is 1, the following command would be used:11-bit COB-ID (bit)RTR DataLength8-byte Data (byte) Func CodeNode ID10 9 8 7 6 5 4 3 2 1 0 0123456711 0 0 0 0 0 0 0 0 10 82F 04 20 01 09 00 00 00SDO clientSDO server(CAN-2017C)11-bit COB-ID (bit)RTRData Length 8-byte Data (byte) Func CodeNode ID10 9 8 7 6 5 4 3 2 1 0 01234 5 6 7 10 1 1 0 0 0 0 0 0 10 460 04 20 01--------SDO clientSDO server (CAN-2017C)Writing object with index 2004h and subindex 1 with 09h means to change the type code of the AI channel 0 with 09h (the AI measurement range is -5V ~ +5V).11-bit COB-ID (bit)RTR DataLength8-byte Data (byte) Func CodeNode ID10 9 8 7 6 5 4 3 2 1 0 0123456711 0 0 0 0 0 0 0 0 10 840 01 64 01 00 00 00 00SDO clientSDO server (CAN-2017C)11-bit COB-ID (bit)RTRData Lengt h8-byte Data (byte) Func CodeNode ID10 9 8 7 6 5 4 3 2 1 0 01234567 10 1 1 0 0 0 0 0 0 10 4 4B 01 64 01 FF 3F ----SDO clientSDO server (CAN-2017C)Reading object with index 6401h and subindex 1 means to get the value of the AI channel 0. According to the type code 09h set before, the replied value of the AI channel 0 is 3FFFh (+2.5V).3.4 Default PDO MappingRxPDO mapping list:ID Len D 0 D 1 D 2 D 3 D 4 D 5 D 6 D 7 200h + x 0 Reserved300h + x 0 Reserved400h + x 0 Reserved500h + x 0 ReservedTxPDO mapping list:ID Len D 0 D 1 D 2 D 3 D 4 D 5 D 6 D 7 180h + x 0 Reserved280h + x 8 AI ch0 AI ch1 AI ch2 AI ch3 380h + x 8 AI ch4 AI ch5 AI ch6 AI ch7 480h + x 0 Reserved3.5 EMCY CommunicationThe data format of the emergency object data follows the structure bellows.Byte 0 1 2 3 4 5 6 7 Content Emergency Error Code Error register Manufacturer specific Error FieldEach bit on the error register is defined as follows.Bit Meaning0 generic error1 current2 voltage3 temperature4 communication error (overrun, error state)5 device profile specific6 reserved (always 0)7 manufacturer specificThe emergency error codes and the error register are specified in the following table.Emergency Error Code ErrorRegisterManufacturer Specific Error Field DescriptionHigh Byte LowByteFirstByteLast Four Bytes00 00 00 00 00 00 00 00 Error Reset or No Error10 00 81 01 00 00 00 00 CAN Controller Error Occur 50 00 81 02 00 00 00 00 EEPROM Access Error81 10 11 04 00 00 00 00 Soft Rx Buffer Overrun81 10 11 05 00 00 00 00 Soft Tx Buffer Overrun81 10 11 06 00 00 00 00 CAN Controller Overrun81 30 11 07 00 00 00 00 Lift Guarding Fail81 40 11 08 00 00 00 00 Recover From Bus Off82 10 11 09 00 00 00 00 PDO Data Length ErrorFF 00 80 0A 00 00 00 00 Request To Reset Node OrCommunicationFF 00 2E 0B 00 00Upper limitalarm 00 00Low limitalarmUpper/Low Limit Alarm ForEach ChannelAppendix A: Dimension CAN-2017C dimension:Unit: mmAppendix B: Type Code Definition Type Code Definition for CAN-2017CType Code Input Range Data FormatMinValueMaxValue08h -10 to +10VEngineer Unit -10V +10V 2's Complement HEX 8000h 7FFFh09h -5 to +5VEngineer Unit -5V +5V 2's Complement HEX 8000h 7FFFh0Ah -1 to +1VEngineer Unit -1V +1V 2's Complement HEX 8000h 7FFFh0Bh -500 to +500 mVEngineer Unit -500mV +500mV 2's Complement HEX 8000h 7FFFh0Ch -150 to +150 mVEngineer Unit -150mV +150mV 2's Complement HEX 8000h 7FFFh0Dh-20 to +20 mA(with 125Ωresistor)Engineer Unit -20mA +20mA2's Complement HEX 8000h 7FFFh。
PMAC770 MODBUS串行通信协议V2.4ZHUHAI PILOT TECHNOLOGY CO.,LTD 珠海派诺科技股份有限公司目录第一章简介 (1)1.1 串行通讯协议的目的 (1)1.2 MODBUS通讯协议的版本 (1)第二章PMAC770-MODBUS 串行通信协议详细说明 (2)2.1 PMAC770-MODBUS协议基本规则 (2)2.2 传送模式 (2)2.3 MODBUS包裹结构描述 (2)2.4 异常响应 (3)2.5 广播命令 (3)第三章通讯包裹 (4)3.1 读继电器状态(功能码01H) (4)3.2 读开关量状态(功能码02H) (4)3.3 读寄存器(功能码03H) (5)3.4 控制通用继电器(功能码05H) (5)3.5 写寄存器(功能码10H) (5)第四章计算CRC-16 (6)第五章PMAC770寄存器说明 (8)5.1 实时测量数据寄存器 (8)5.2 电能数据寄存器(三相三线下只有总电度,没有分相电度) (10)5.3 谐波数据寄存器 (12)5.4 谐波电度数据寄存器 (16)5.5 需量数据寄存器 (16)5.6 最值数据寄存器 (17)5.7 复费率数据寄存器 (22)5.8 频率偏差记录数据寄存器 (27)5.9 电压偏差记录数据寄存器 (27)5.10 电压不平衡率记录数据寄存器 (27)5.11 事件记录数据寄存器 (28)5.12 设备参数数据寄存器 (28)5.13 命令数据寄存器 (33)5.14 大容量存储 (33)5.15 设备信息数据寄存器 (35)5.16 BACnet (36)第一章简介通信协议详细地描述了PMAC770在MODBUS通讯模式下的输入和输出命令、信息和资料,以便第三方使用和开发。
1.1 串行通讯协议的目的通信协议的作用使信息和资料在上位机(主站)和PMAC770之间有效地传递,它包括:1)允许主站访问和设定所接PMAC770的全部设置参数;2)允许访问PMAC770的所有测量资料和事件纪录。
1.2 MODBUS通讯协议的版本该通讯协议适用于本公司已经出厂的所有各种版本的PMAC770仪表,对于日后的系列若有改动会加以特别说明。
第二章PMAC770-MODBUS 串行通信协议详细说明2.1 PMAC770-MODBUS协议基本规则以下规则确定在RS485(或者RS232C)回路控制器和其它RS485串行通信回路中设备的通信规则:1)所有RS485回路通信应遵照主/从方式。
在这种方式下,信息和资料在单个主站和最多32个从站(监控设备)之间传递;2)主站将初始化和控制所有在RS485通信回路上传递的信息;3)无论如何都不能从一个从站开始通信;4)所有RS485环路上的通信都以“打包”方式发生。
一个包裹就是一个简单的字符串(每个字符串8位),一个包裹中最多可含255个字节。
组成这个包裹的字节构成标准异步串行资料,并按8位资料位,1位停止位,无校验位的方式传递。
串行数据流由类似于RS232C中使用的设备产生;5)主站发送包裹称为请求,从站发送包裹称为响应;6)任何情况从站只能响应主站一个请求。
2.2 传送模式MODBUS协议可以采用ASCII或者RTU模式传送资料。
PMAC770仅仅支持RTU模式,8位资料位,无校验位,1位停止位。
2.3 MODBUS包裹结构描述每个MODBUS包裹都由以下几个部分组成:1)地址域2)功能码域3)数据域4)校验域2.3.1 地址域MODBUS的从站地址域长度为一个字节,包含包裹传送的从站地址。
有效的从站地址范围从1~247。
从站如果接收到一帧从站地址域信息与自身地址相符合的包裹时,应当执行包裹中所包含的命令。
从站所响应的包裹中该域为自身地址。
2.3.2 功能码域MODBUS包裹中功能域长度为一个字节,用以通知从站应当执行何操作。
从站响应包裹中应当包含主站所请求操作的相同功能域字节。
有关PMAC770的功能码参照下表。
功能码含义功能0x01 读取继电器状态获得当前PMAC770内部一个或多个继电器的状态(0/1)0x02 读取开关量状态获得当前PMAC770内部一个或多个开关输入的状态(0/1)0x03 读取寄存器获得当前PMAC770内部一个或多个当前寄存器值0x05 操作通用继电器写入0xFF00可以操作继电器闭合,写入0x0000可操作继电器断开。
0x10 设置寄存器将指定数值写入PMAC770内部一个或多个寄存器内2.3.3 数据域MODBUS数据域长度不定,依据其具体功能而定。
MODBUS数据域采用”BIG INDIAN”模式,即是高位字节在前,低位字节在后。
举例如下:Example 2.11个16位寄存器包含数值为0x12AB,寄存器数值发送顺序为:高位字节= 0x12低位字节= 0x0AB2.3.4 校验域MODBUS-RTU模式采用16位CRC校验。
发送设备应当对包裹中的每一个资料都进行CRC16计算,最后结果存放入检验域中。
接收设备也应当对包裹中的每一个资料(除校验域以外)进行CRC16计算,将结果域校验域进行比较。
只有相同的包裹才可以被接受。
具体的CRC 校验算法参照第四章计算CRC-16。
2.4 异常响应如果主站发送了一个非法的包裹给PMAC770或者是主站请求一个无效的资料寄存器时,异常的资料响应就会产生。
这个异常资料响应由从站地址、功能码、故障码和校验域组成。
当功能码域的高比特位置为1时,说明此时的资料帧为异常响应。
下表说明异常功能码的含义:功能码名称说明01 非法功能码PMAC770-MODBUS只支持01H、02H、03H、05H和10H功能码,该码表示从站接收到非法的功能码;或者是PMAC770接收到一个错误的操作密码。
02 非法资料地址说明PMAC770接收到无效的资料地址,或者是请求寄存器不在有效的寄存器范围内。
03 非法资料地址请求的寄存器个数超长2.5 广播命令PMAC770-MODBUS协议支持广播命令(必须是写命令(0x10)), 用于校时。
第三章通讯包裹PMAC770-MODBUS支持两种功能码,标准的MODBUS协议仅支持16位资料模式,也就说传输任何测量值最大为65535。
3.1节将说明PMAC770读取继电器状态包裹和响应包裹的格式。
3.2节将说明PMAC770读取开关输入状态包裹和响应包裹的格式。
3.3节将说明PMAC770的读数据包裹和响应包裹的格式。
3.4节将描述继电器控制的命令。
3.5节将说明PMAC770写资料包裹和响应包裹的格式。
3.1 读继电器状态(功能码01H)采用01命令可以读取继电器状态,继电器地址从0开始。
响应报文中的继电器按数据字段的每位一个继电器进行打包。
状态被表示成1=ON和0=OFF。
第一个数据字节的LSB(最低有效位)包含询问中所寻址的输出。
其他继电器依次类推,一直到这个字节的高位端为止,并在后续字节中按照从低位到高位的顺序排列。
如果返回的输出数量不是8的倍数,将用零填充最后数据字节中的剩余位(一直到字节的高位端)。
字节计数字段指定了数据的全部字节数。
读继电器状态包裹格式(主机→响应格式(PMAC770→主机)PMAC770)从站地址1字节从站地址1字节功能码01H 1字节功能码01H 1字节开始地址2字节字节数(N)1字节继电器个数2字节继电器状态N字节CRC校验码2字节CRC校验码2字节N=输出数量/8,如果余数不等于0,那么N=N+1。
3.2 读开关量状态(功能码02H)采用02命令可以读取开关输入状态,开关输入地址从0开始。
响应报文中的开关量按数据字段的每位一个开关量进行打包。
状态被表示成1=ON和0=OFF。
第一个数据字节的LSB(最低有效位)包含询问中所寻址的输出。
其他开关量一次类推,一直到这个字节的高位端为止,并在后续字节中按照从低位到高位的顺序排列。
如果返回的输出数量不是8的倍数,将用零填充最后数据字节中的剩余位(一直到字节的高位端)。
字节计数字段指定了数据的全部字节数。
读开关量状态包裹格式(主机→响应格式(PMAC770→主机)PMAC770)从站地址1字节从站地址1字节功能码02H 1字节功能码02H 1字节开始地址2字节字节数(N)1字节开关量个数2字节开关量状态N字节CRC校验码2字节CRC校验码2字节N=输出数量/8,如果余数不等于0,那么N=N+1。
3.3 读寄存器(功能码03H)由主站机发送的包裹请求PMAC770响应所有有效的寄存器,保留寄存器内容为0。
读寄存器包裹格式(主机→PMAC770)响应格式(PMAC770→主机)从站地址1字节从站地址1字节功能码03H 1字节功能码03H 1字节开始地址2字节字节数(2*寄存器数目)1字节寄存器个数2字节第一个寄存器资料2字节CRC校验码2字节第二个寄存器资料2字节…………CRC校验码2字节3.4 控制通用继电器(功能码05H)采用05命令可以对通用继电器进行操作,继电器地址从0开始。
数据域为0xFF00,将继电器闭合;数据域为0x0000,将继电器断开。
写寄存器包裹格式(主机→PMAC770)响应格式(PMAC770→主机)从站地址1字节从站地址1字节功能码05H 1字节功能码05H 1字节开始地址2字节开始地址2字节数据域FF 数据域FF数据域00 数据域00CRC校验码2字节CRC校验码2字节3.5 写寄存器(功能码10H)该命令允许主站配置PMAC770工作参数,以下为资料格式:写寄存器包裹格式(主机→PMAC770)响应格式(PMAC770→主机)从站地址1字节从站地址1字节功能码10H 1字节功能码10H 1字节开始地址2字节开始地址2字节寄存器个数2字节寄存器个数2字节字节个数(2*寄存器个数)1字节CRC校验码2字节第一个寄存器资料第二个寄存器资料……….CRC校验码2字节注意:PMAC770假定写入的寄存器从第一个寄存器开始是连续的;第四章计算CRC-16该部分将描述计算CRC-16的过程。
在帧中的有关的字节被义为是一串2进制数据(0,1)。
第16位校验和是这样得到的:该串数据流被216乘,然后除以发生器多项式(X16+X15+X2+1),该式以2进制表示为1100000000000101。
商被忽略,16位的余数就是CRC的值,在计算CRC-16值时,全部算术运算用modulo two或者异或(X0R)算法。
按照下列步骤产生CRC-16的校验和:1)省略发生器最有意义的位,并且把位的顺序颠倒过来。
形成一个新的多项式,结果是1010000000000001或者16进制的A001。
2)将全部1或者16进制FFFF装入16位寄存器。
3)用16位寄存器中低阶字节对第一个资料字节进行XOR运算,把结果存入16位寄存器。