无线传感器网络节点定位算法的Matlab仿真
- 格式:doc
- 大小:622.00 KB
- 文档页数:44
信息科学科技创新导报 Science and Technology Innovation Herald90无线定位系统的基本功能是收集一定地理区域内的无线信息,根据接收信号频率、到达时间及角度等信号参量的变化,获取目标点的位置。
依照检测的特征值的不同,可以将基本的定位方法分成4种:基于场强测量的定位方法(R S S I)、基于信号到达时间差的定位方法(T D OA)、基于信号到达时间的定位方法(TOA)、基于信号到达角度的定位方法(AOA)以及混合定位方法,由于RS SI定位方法较为简单,但受多径衰落和阴影效应的影响较大,使其定位精度较差,因此,该方法没有得到广泛的重视和应用;AOA定位方法定位精度较高,但系统设备复杂,成本较高。
T OA定位方法精度高,但对时间同步有较高要求;T OA需要严格的M S 与BS 时钟同步,而T DOA只需BS间的时钟同步即可,因此该文利用TDOA来确定目标点的位置。
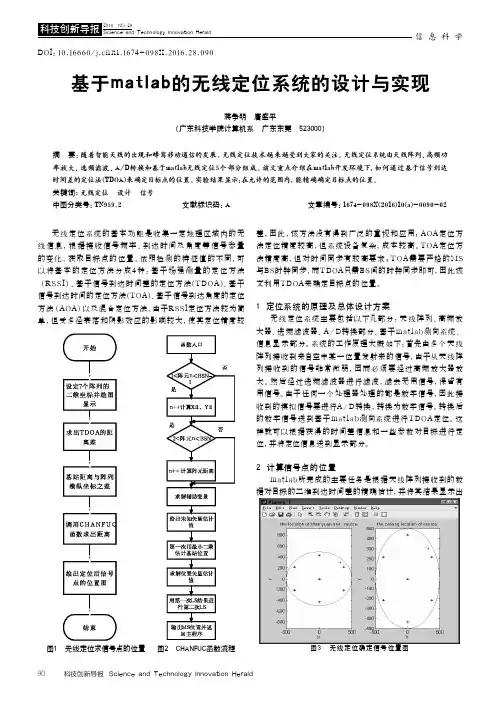
1 定位系统的原理及总体设计方案无线定位系统主要包括以下几部分:天线阵列、高频放大器、选频滤波器、A/D转换部分、基于m at l ab 测向系统、信息显示部分。
系统的工作原理大概如下:首先由多个天线阵列接收到来自空中某一位置发射来的信号,由于从天线阵列接收到的信号非常微弱,因而必须要经过高频放大器放大。
然后经过选频滤波器进行滤波,滤去无用信号,保留有用信号。
由于任何一个处理器处理的都是数字信号,因此接收到的模拟信号要进行A/D转换,转换为数字信号。
转换后的数字信号送到基于m at l ab 测向系统进行T D OA定位。
这样就可以根据获得的时间差信息和一些参数对目标进行定位,并将定位信息送到显示部分。
2 计算信号点的位置m at l ab所完成的主要任务是根据天线阵列接收到的数据对目标的二维到达时间差的精确估计,并将其结果显示出DOI:10.16660/ k i.1674-098X.2016.28.090基于matlab的无线定位系统的设计与实现蒋争明 唐盛平(广东科技学院计算机系 广东东莞 523000)摘 要:随着智能天线的出现和蜂窝移动通信的发展,无线定位技术越来越受到大家的关注。
一、介绍matlab无线传感器实验代码的作用和重要性1. 无线传感器在现代科技中的重要性2. Matlab作为无线传感器实验的常用工具3. 无线传感器实验代码的编写和应用范围二、matlab无线传感器实验代码的基本框架及功能1. 无线传感器实验代码的基本框架概述2. Matlab在无线传感器实验中的应用功能3. 无线传感器实验代码的具体功能介绍三、matlab无线传感器实验代码的编写流程和技巧1. 无线传感器实验代码的编写步骤2. Matlab编程技巧在无线传感器实验中的应用3. 案例分析:matlab实现无线传感器数据采集和处理的代码编写流程四、matlab无线传感器实验代码的应用案例1. 传感器网络数据处理和分析2. 无线传感器节点控制和管理3. 无线传感器实验代码在工业生产中的应用实例分析五、matlab无线传感器实验代码的发展趋势1. 无线传感器技术的发展现状2. Matlab在无线传感器实验中的创新应用3. 未来matlab无线传感器实验代码的发展方向和趋势结尾:matlab无线传感器实验代码的未来展望和重要性总结1. 无线传感器技术和matlab在科学研究中的重要性2. 对matlab无线传感器实验代码的期望和推广应用3. 未来matlab无线传感器实验代码的发展方向和应用前景六、matlab无线传感器实验代码的应用案例无线传感器网络已经被广泛应用于许多领域,如环境监测、智能交通、智能家居、农业监测、医疗保健等。
在这些领域,无线传感器实验代码在数据采集、数据处理、节点控制等方面发挥着重要作用。
1. 传感器网络数据处理和分析通过matlab无线传感器实验代码,我们可以对传感器网络中的数据进行高效的处理和分析。
传感器网络中的数据通常具有时间序列、空间分布等特点,在处理这些数据时,我们需要进行信号处理、滤波、数据融合等操作,而matlab提供了丰富的工具箱和函数库,能够较为方便地实现这些操作。
基于Matlab仿真的区域传感器定位最佳节点布局研究作者:韩明冯立杰马庆禄来源:《中国新通信》2014年第20期【摘要】基于无源时差定位的方式在民用和警用上具有广泛的应用,其被动的工作方式以及隐蔽的性能在区域环境预警和监控中越来越发挥重要的作用。
本文首先对振动传感器定位的原理和方法进行了阐述,对时差无源定位的算法进行了研究,明确了节点中主站与副站基线的距离以及传感器的阵形等因素决定了定位精度的高低,从而提出了多节点协同定位中最佳站址布局的方式。
【关键词】时差定位定位精度传感器布站一、多节点区域协同定位系统简介根据工程的需要本文设计了多节点协同定位系统,本系统由节点模块、CAN通信模块、区域控制器模块、中心控制器模块、中心模块等五个模块组成。
其中每一个节点中的振动传感器与区域控制器通过CAN总线进行通信,而后经过滤波电路和A/D转换电路后,通过CAN 总线发送至中心控制器。
中心控制器通过时差定位原理来计算出振源的具体位置[1]。
二、联合测时差定位精度算法分析由上述分析可知二维空域的测时差定位系统主要由一个主阵和两个副阵共三个接收基阵组成。
假设主阵阵址为(x0,y0),副阵i阵址为(xi,yi),测得目标(x,y),到达主阵与各副阵的距离差为[3]。
由上述分析可得二维目标定位的观测方程为:(1)对上式方程关于x,y进行全微分得:(2)其中:本式中定位几何稀释精度GDOP可以如下表示:三、传感器阵列布局以及仿真假设各传感器的测量时差误差的标准差都相等,其均为0.1ms,各站接收站站址测量误差为0.5m,其中主站的坐标位置为(0,0),辅站的坐标位置为(100,0)、(-100,0),待测的振源目标坐标为(x,y),则相应仿真结果如图3-1所示,而后对阵形为等边三角形的传感器分布进行Matlab仿真,得到其定位精度分布图如图3-2所示:比较图3-1至图3-2所示的各种GDOP分布情况,可以看出,不同的基阵分布对应的GDOP分布等高线是不同的,布阵形式对于系统的定位精度有很大影响。
无线传感器网络中一种改进的三点定位算法谢绍国【摘要】无线传感器网络作为一种全新的信息获取和处理技术,广泛应用于军事、医疗、环境监测等领域,而定位是这些应用的前提和基础.因此,针对无线传感器网络节点自身定位技术的研究具有重要的理论和实际意义.为了有效地利用信标节点和提高定位精度,在研究三点定位算法的基础上,提出了改进的三点定位算法.理论分析表明,改进的三点定位算法进一步有效利用了信标节点,提高了节点定位精度.仿真实验结果显示,与三点定位算法相比,改进的三点定位算法减少了定位误差.%As a completely new information acquisition and processing technology, wireless sensor networks are widely used in military, medical, environmental monitoring and other fields, and location positioning is the premise and foundation of these applications. Therefore, it is of great theoretical and practical significance to study the self-localization technology of wireless sensor network nodes. In order to effectively utilize beacon nodes and improve positioning accuracy, the modified three-point positioning algorithm is proposed based on the study of three-point positioning algorithm. Theoretical analysis indicates that the modified three-point positioning algorithm can further utilize beacon nodes effectively and improve the positioning accuracy of nodes. Simulation results show that as compared with the traditional three-point positioning algorithm, the modified three-point positioning algorithm could reduce the positioning error.【期刊名称】《通信技术》【年(卷),期】2017(050)012【总页数】3页(P2756-2758)【关键词】无线传感器网络;三点定位;信标节点;定位误差【作者】谢绍国【作者单位】安庆师范大学,安徽安庆 246133【正文语种】中文【中图分类】TN911.21节点定位技术在无线传感器网络的节点部署中非常重要[1]。
基于matlab的无线传感网节点定位仿真基于matlab的无线传感网节点定位仿真摘要无线传感网络节点定位技术是无线传感网络重要的支撑技术之一。
节点位置信息不仅是事件监测的前提,也是网络拓扑自配置、提高路由效率、向观察者报告所需信息的基础;不知道所获信息所对应的位置,所获信息也失去了应有的意义。
无线传感网络节点部署是随机的,由于受到布设环境和自身因素的影响,如何最大限度提高节点定位精度是无线传感网络定位研究领域的一个难点。
因此,开展节点定位技术的研究具有重要理论和现实意义。
本论文介绍了无线传感网络发展历程和结构模型,分析了无线传感网络中的关键技术,深入讨论了无线传感网络节点定位技术。
着重研究了节点定位的概念、定位技术分类、定位的基本原理和基本方法,同时对现有的典型定位算法和定位系统进行了分析比较。
论文重点对无线传感网络定位技术中的非测距定位DV-hop算法进行了深入研究,详细分析了其存在误差的原因。
分别在二维和三维环境下提出了改进的节点定位算法。
(1)为了减小传统DV-hop算法的定位精度误差,论文在二维环境中提出了一种新的DV-hop定位算法。
(2)针对新DV-hop定位算法存在覆盖率较低的问题,提出了一种升级虚拟锚节点的定位算法。
(3)在三维环境下,提出了一种新的三维节点定位算法。
关键词:节点定位,DV-hop,锚节点,平均跳距权值,跳数权值WIRELSS SENSOR NETWORK NODE LOCATIONTECHNOLOGY SIMULATIONABSTRACTThe wireless sensor network node location technology is an important supporting technology for WSN. The node position information of WSN is not only the premise of monitoring events, but also it is the basis of the network topology from the self-configuration, improve routing efficiency and reporting the information required to observers. If we do not know the position information, the information we are interested will lose its proper meaning. Wireless sensor network nodes are randomly deployed. How to maximize the localization accuracy of localization is a difficult research area in wireless sensor networks for the effect of the layout environment and factors of its own. Therefore the research for the wireless sensor network node location technology has important theoretical and practical significance.This paper introduced the development course of wireless sensor network and the architecture model of the wireless sensor network, analyzed the key technology for wireless sensor networks, and thoroughly discussed wireless sensor network node location technology. Focused on the concept of node localization, the location classification, the basic principles and methods of localization, and the criteria of positioning performance evaluation are made a more detailed analysis and research, while some typical existing location algorithms and systems are made a brief introduction and comparison. The paper focused on the Range-free positioning algorithm of wireless sensor networks DV-hop in-depth study, and analyzed the reasons for the existence of error in detail. Then, this paper presented the improved localization algorithms in two-dimensional and three-dimensional environment respectively.(1) The paper presented a new DV-hop localization algorithm in the two-dimensional environment to improve localization accuracy error of traditional DV-hop algorithm.(2)For the novel DV-hop localization algorithm have the problem of low coverage, a location algorithm which upgraded the virtual anchor nodes algorithm was presented.(3)In the three-dimensional environment, the paper presented new three-dimensional localization algorithms.KEYWARDS: node location, DV-hop, anchor node average hop-distance weight hop weight目录1绪论 (2)1.1 研究背景目的及意义 (2)1.1.1 研究背景 (2)1.1.2 研究意义 (2)1.2 国内外研究应用现状与发展趋势 (3)1.2.1 国内外研究应用现状 (3)1.2.2 发展趋势 (4)1.3 论文研究思路及章节结构 (4)2无线传感网络的组成结构及其关键技术 (6)2.1 无线传感网络体系结构 (6)2.2 无线传感网络的关键技术 (9)2.3 无线传感网络的应用 (11)3无线传感网络定位基本原理 (13)3.1 无线传感网络定位技术概述 (13)3.1.1 无线传感网络定位的概念 (13)3.1.2 无线传感网络定位技术有关术语 (14)3.1.3 无线传感网络定位技术特点 (14)3.1.4 无线传感网络定位技术相关应用 (15)3.2 无线传感网络定位基本方法 (16)3.2.1 基本原理 (16)3.2.2 节点间距离的测量方法 (17)3.2.3 目标位置计算方法 (20)3.3 无线传感网络典型定位算法和定位系统 (23)3.3.1 几种典型的定位算法 (23)3.4 本章小结 (28)4DV-hop算法研究 (29)4.1 引言 (29)4.2 传统DV-hop算法 (29)4.3 传统DV-hop算法误差分析 (30)4.4 新的DV-hop算法的设计及其实现 (33)4.4.1 跳数计算 (33)4.4.2 节点距离的计算 (33)4.4.3 锚节点组的选定和位置估计 (35)4.5 本章小结 (36)5三维节点定位方法 (37)5.1 引言 (37)5.2 三维节点定位的必要性 (37)5.3 几种典型三维节点定位算法 (37)5.3.1 传统质心算法 (37)5.3.2 一种新的质心算法 (39)5.3.3 Landscape-3D算法 (41)5.3.4 APIS算法 (42)5.4 新三维节点定位算法的设计及其实现 (43)5.4.1 跳数计算 (43)5.4.2 距离计算 (43)5.4.3 位置估计 (43)5.4.4 新三维定位算法的执行 (46)5.4.5 仿真实验 (46)5.5本章小结 (48)全文总结 (49)参考文献 (50)致谢 (51)1绪论1.1 研究背景目的及意义1.1.1 研究背景随着无线技术的快速发展和日趋成熟,无线通信也发展到一定的阶段,其发展的技术越来越成熟,方向也越来越多,越来越重要,大量的应用方案开始采用无线技术进行数据采集和通信。
物联网工程课程设计
基于Matlab的无线传感器网络节点定位仿真
姓名:
学号:
班级:
二○一六年六月
目录
一、绪论 (1)
1.1 研究背景 (1)
1.2 研究意义 (1)
1.3 研究内容 (1)
二、设计要求及方案 (1)
2.1 设计要求 (1)
2.2 设计方案 (1)
三、基于无线传感器网络节点定位算法 (1)
3.1 定位算法简介 (1)
3.2 三角测距定位算法 (1)
四、定位算法在Matlab下仿真 (1)
4.1 参数设定 (1)
4.2 仿真实验 (1)
4.3 实验分析 (1)
五、结论..................................................... 错误!未定义书签。
参考文献..................................................... 错误!未定义书签。
一、绪论
1.1 研究背景
1.2 研究意义
1.3 研究内容
二、设计要求及方案
2.1 设计要求
2.2 设计方案
三、无线传感器网络节点三角定位算法
3.1 定位算法简介
3.2 三角测距定位算法
四、定位算法在Matlab下仿真
4.1 参数设定
4.2 Matlab代码及仿真结果
4.3 实验分析
五、结论
参考文献
[1] 董跃钧基于ZIGBEE技术的室内定位算法研究及应用数字技术与应用2012年
1。
3.4 TDOA算法仿真我们取节点总数为100个,已知节点为20个,通信半径为60米,边界长宽均为100米,已知节点坐标和未知节点坐标均随机产生,定位结果如下:绝对误差3.3225e-13米,相对误差 5.5376e-13%,均接近于0(盲节点的定位误差视为0),所有节点均可被定位且它们的定位误差几乎为0。
因为将盲节点的定位误差视为0,则此TDOA定位算法的误差来源于计算过程中的小数位数的取舍,这样的误差是十分小的与接近于0的运算结果相符。
注:≈0表示接近于0(远小于1)。
绝对误差:定位出的未知节点的坐标与实际坐标相差的距离值平均绝对误差:N次运算绝对误差的均值相对误差:绝对误差与节点通信半径的比平均绝对误差:N次运算相对误差的均值平均盲节点比例:盲节点总数占总未知节点数的比例将不能被定位的节点的估计位置全置为(0,0)图XX.基于TDOA算法的定位仿真结果图XX.基于TDOA算法的定位仿真定位出来的每个未知节点的对误差同样的因为已知节点和未知节点坐标均为随机产生,所以定位结果的误差也具有随机性,因此保持上述条件不变做多次运算求定位误差的平均值则可以表示在上述条件下定位的一般误差水平1次10次20次40次50次100次200次300次500次800次平均绝对误差(米)≈0 ≈0 ≈0 ≈0 ≈0 ≈0 ≈0 ≈0 ≈0 ≈0平均相对误差(%)≈0 ≈0 ≈0 ≈0 ≈0 ≈0 ≈0 ≈0 ≈0 ≈0平均盲节比例(%)0 0 0.062500.031250.050000.037500.068750.087500.077500.13000表XX.多次运算后的平均绝对误差、平均相对误差、平均盲节比例从上表中我们可以看出,随着定位次数的增加平均绝对误差和平均相对误差一直是远小于1的,而平均盲节比例处于不稳定状态,因此我们选择做100次定位运算作为定位运算的代表值。
由于定位算法的原理导致了在已知节点通信半径外的未知节点间不能通信,所以会出现无法定位的盲节点,盲节点的出现还与网络的拓扑结构有关。
1 引言1.1 背景和发展俗语有云“水火无情”。
当今,火灾是世界各国人民所面临的一个共同的灾难性问题。
它给人类社会造成过不少生命、财产的严重损失。
随着社会生产力的发展,社会财富的日益增加,火灾损失上升及火灾危害范围扩大的总趋势是客观规律。
据联合国“世界火灾统计中心”提供的资料介绍,发生火灾的损失,美国不到7 年翻一番,日本平均16 年翻一番,中国平均12 年翻一番。
全世界每天发生火灾1 万多起,造成数百人死亡。
近几年来,我国每年发生火灾约4万起,死2000多人,伤3000—4000 人,每年火灾造成的直接财产损失10 多亿元,尤其是造成几十人、几百人死亡的特大恶性火灾时有发生,给国家和人民群众的生命财产造成了巨大的损失。
严峻的现实证明,火灾是当今世界上多发性灾害中发生频率较高的一种灾害,也是时空跨度最大的一种灾害。
因此,火灾的监控成为科研工作的一大课题。
随着科技的进步, 现代火灾监控系统正朝着分布式、网络化、智能化的方向发展。
人们不仅要求系统稳定可靠, 功能齐全, 而且还要求能够结合无线通信的优势, 实现无线监控, 实时掌握系统的运行状态。
传统的火灾监测系统主要安装红外或微波等各种类型的报警探测器, 通过有线方式与计算机安全综合管理系统联网, 计算机系统对报警系统进行集中管理和控制。
由于电子设备长期处于运行状态, 电气设备过载、过热、短路的火灾隐患较多。
因此, 传统的火灾监控系统本身存在着很多的安全隐患。
本次设计便运用了无线传感器网络和动态机器人联合工作的思想设计了火灾监控系统。
该系统共有传感器节点、机器人节点、危险敌对区域搜索节点和远端用户节点四种节点。
无线传感器网络是由大量的具有温度、湿度采集功能、无线通信、计算功能的微小传感器节点构成的自组织分布网络系统。
每个节点具有数据采集与路由功能。
传感器节点最后把数据都发送到机器人节点处,机器人节点相当于网关负责融合、存储数据,并把它传送到Internet或卫星网络上将信息传给用户节点。
基于Matlab与VC的WSN定位跟踪仿真平台徐小玲;刘美【摘要】目前,基于无线传感器网络的目标定位跟踪实验仿真平台还不够完善,针对实时目标定位跟踪性能分析的需求,本文主要完成无线传感器网络节点数据采集功能设计,通过部署监控区域的节点,利用网关节点通过串口通信将数据传输到上位机,选择VisualC++6.0与Matlab 7.6作为软件开发环境,研究Matlab与VC的混合编程接口实现,完成在VC环境中的WSN实验仿真平台设计,根据实验表明,该上位机平台可实现传感器节点发送数据包的接收,节点目标跟踪算法分析与验证、实时反映节点操作等,为后续WSN定位跟踪研究提供保障.【期刊名称】《计算机测量与控制》【年(卷),期】2015(023)011【总页数】4页(P3783-3785,3789)【关键词】无线传感器网络;Matlab;VC;仿真平台【作者】徐小玲;刘美【作者单位】广东石油化工学院计算机与电子信息学院,广东茂名 525000;广东石油化工学院计算机与电子信息学院,广东茂名 525000【正文语种】中文【中图分类】TP391无线传感器网络由大量的具有传感、计算和通信能力的节点组成,以随机的方式来把节点散布在目标区域形成一个平面实现传感器网络的部署,收集不同类型的数据。
实现无线传感器网络的应用包括目标场成像,入侵检测,气象监测,安全和战术监视等。
为验证无线传感器网络不同业务的性能及相关算法的仿真,目前广泛应用虚拟仿真环境进行无线传感器网络的仿真。
大量的网络仿真器广泛应用于无线传感器网络协议的发展。
然而,几乎没有跟踪定位仿真工作的评估框架。
文献[1]为定位开发人员提供选择合适的网络模拟器或编程语言的指南。
它包括定位算法的描述功能比较和重要性评价分析。
包括常用的仿真平台包括国内外OPNET,OMNET++,TOSSIM,NS2[2],Matlab等。
为了实现无线传感器网络各类业务的仿真,国内外学者都针对各自应用,设计了仿真平台。
无线传感器网络flooding路由协议的MATLAB仿真摘要无线传感器网络是计算机科学技术的一个新的研究领域,是传感器技术、嵌入式计算技术、分布式信息处理技术和无线通信技术相结合的产物。
与传统网络相比,无线传感器网络具有造价低、功耗低、布局灵活性强、监测精度高等特点,因此在军事、医疗、家用等多个领域均有广阔的应用市场。
本文重点研究基于无线传感器网络的泛洪式路由协议,无线传感器网络节点数量庞大、单个节点资源有限,其路由协议设计的首要目标是提高能量有效性,延长网络寿命。
本文总结了WSN的概念、结构、特点,分析了WSN的关键性技术问题及网络协议;研究了WSN的网络协议体系和路由协议的分类,分析比较了目前国内外学者提出的几种有代表性的路由协议及其性能优缺点;选择了flooding路由协议为研究重点,分析了该路由算法的具体实现,针对传感器节点能量及传输范围有限等特点,提出了一种基于延迟的自适应泛洪路由算法,首先通过源节点在网内用较小的路由请求报文和路由回复报文来建立路由,路由建立的过程中自适应地确定等待时间以使更优的路由请求报文得到转发,然后源节点再沿着建立好的路径转发较大的数据报文。
并采用MATLAB网络仿真工具对该路由协议进行了整体仿真,并对其数据进行了分析。
仿真实验表明新算法较Flooding节能,能较好的克服Flooding算法中报文冗余度高、能耗大等不足。
关键词:无线传感器网络;flooding路由协议;MATLAB仿真ABSTRACTWireless sensor networks are a new research field of computer science and technology. They are the integration of sensor techniques, nested computation techniques, distributed computation techniques and wireless communication techniques. Comparing with traditional networks, the wireless sensor networks features with low cost, low power loss, flexible layoutand high monitor precision, therefore the sensor networks can be used for various application are as such as military, chemical, home.This article focus on wireless sensor networks based on the Pan Hung-routing protocol, wireless sensor network nodes large number of individual nodes with limited resources, the routing protocol designed first and foremost objective is to improve energy efficiency and extend the network lifetime. This paper summarizes the WSN the concept, structure and characteristics of the WSN the key technical problems and network protocols; study of the WSN system and network routing protocol agreement the classification, analysis and comparison of the current domestic and foreign scholars have proposed several representatives The routing of the agreement and its performance advantages and disadvantages; chosen the flooding focus on routing protocols, analysis of the routing algorithm to achieve the specific, the sensor nodes the limited scope of energy and transmission characteristics, a delay based on the Adaptive Flood routing algorithm, first of all through the nodes in the network source in the smaller routing, and routing the request to restore the text to create a routing, routing the process of establishing adaptive to determine the waiting time to make better Routing the request was transmitted by text, and then another source nodes along the path forward the establishment of good data on the larger text. MATLAB and use the network simulation tool for the overall routing protocol simulation, and the data were analyzed. The simulation shows that the new algorithm than Flooding energy-saving, can better overcome Flooding algorithm message redundancy and high energy consumption, such as the insufficient.Keywords:WSN;flooding routing protocols;MATLAB Simulation目录1 绪论 (1)1.1 课题背景 (1)1.2 国内外技术研究现状 (2)1.3 课题研究的目的和意义 (3)2 WSN综述 (4)2.1 WSN的概念 (4)2.2 WSN的结构 (4)2.2.1 节点结构 (4)2.2.2 网络体系结构 (5)2.3 WSN协议栈 (6)2.4 WSN的拓扑结构 (7)2.5 WSN的特点 (10)2.6 WSN的关键性技术问题 (11)2.6.1 功耗问题 (12)2.6.2 节能策略 (12)2.6.3 通信问题 (14)2.6.4 网络安全问题 (15)2.6.5 定位问题 (15)2.6.6 数据管理 (15)2.6.7 服务质量 (16)2.6.8 嵌入式操作系统 (16)3.WSN路由协议算法分析 (17)3.1 WSN路由协议的分类方法 (17)3.2 几种典型路由协议的分析 (18)3.2.1 平面路由协议 (18)3.2.2 分层路由协议 (22)4 Flooding路由协议的分析与研究 (27)4.1 泛洪算法模型 (27)4.2 算法流程图 (28)4.3 基于延迟的自适应洪泛路由算法 (29)4.3.1 算法中用到的报文和数据 (29)4.3.2 SFD算法描述 (30)4.3.3 性能比较尺度 (31)4.3.4 理论分析 (32)5 Flooding路由协议的MATLAB仿真 (35)5.1 MATLAB仿真平台介绍 (35)5.2 算法仿真实验参数 (38)5.3 实验结果 (39)6 结论 (42)致谢 (43)参考文献 (44)附录A:英文原文 (45)附录B:中文翻译 (51)附录C:程序代码 (55)1 绪论1.1 课题背景无线传感器网络是新兴的下一代传感器网络,最早的代表性论述出现在1999年,题为“传感器走向无线时代”。
MATLAB中的无线传感器网络设计无线传感器网络(Wireless Sensor Network,WSN)是一种由大量分布在感兴趣区域内的无线传感器节点组成的自组织网络。
通过传感器节点之间的通信和协作,WSN能够实时采集、处理和传输环境中的各种数据。
在实际应用中,WSN广泛应用于环境监测、智能交通、农业和健康照护等领域。
本文将通过MATLAB软件介绍WSN的设计与实现。
一、无线传感器网络的基本结构无线传感器网络由多个节点组成,每个节点都具备感知、处理和通信的能力。
节点之间通过无线通信进行数据传输。
一个典型的无线传感器节点由传感器、处理器、收发器、存储器以及能量供给组成。
传感器负责采集环境中的信息,处理器对采集到的数据进行处理和分析,收发器负责和其他节点进行通信,存储器用于存储数据,能量供给确保节点的正常运行。
二、MATLAB在无线传感器网络中的应用MATLAB是一种功能强大且易于使用的数学软件,适用于各种领域的建模和仿真工作。
对于WSN的设计和实现,MATLAB提供了丰富的工具箱和函数,可以简化开发过程并加速算法的实现。
以下是几种常见的MATLAB在无线传感器网络中的应用。
1. WSN仿真与性能分析WSN的设计和优化通常需要进行大量的仿真工作。
MATLAB中的工具箱如Wireless Sensor Network Toolbox和Communications Toolbox可以帮助用户建立WSN的仿真模型,进行性能分析。
通过Wireless Sensor Network Toolbox,用户可以方便地创建各种拓扑结构的网络模型,定义不同类型的传感器节点和其传输特性。
用户可以设置节点之间的距离、通信范围、传输速率等参数,仿真节点之间的通信和数据传输过程。
通过性能指标比如网络覆盖率、能量消耗和数据传输延迟等,用户可以评估不同网络设计方案的性能优劣。
Communications Toolbox提供了许多用于通信系统设计和性能分析的函数和工具。
%本例对基于量测非线性模型(正切),进行了仿真;通过对比分析EKF,UKF和PF粒子滤波的性能。
仿真结果可以看出粒子滤波器比UKF优越,UKF比EKF性能优越。
可作为学习滤波器的参考资料。
%存在问题:目前修正效果还不够完美,滤波值在预测值的基础上有所改善,使其接近真实值。
clear all;close all;clc;%Clear command window.st = 100; % simulation length(time)MC=50; %仿真次数dl=zeros(MC,st+1);de=zeros(MC,st+1);dp=zeros(MC,st+1);%仿真10次for time=1:MCdl(time,1)=0;de(time,1)=0;dp(time,1)=0;Q = 0.5; % process noise covarianceR = [3^2 0;0 0.1745^2 ];% measurement noise covariancex0 = [0,5,0,7]'; % initial statex = x0;xA = [x(1)];%Array:Save the true X -positionyA = [x(3)];%Array:Save Y-Positionxobs = [x(1)]; %观测到的坐标yobs = [x(3)];ZA = [];%初始化系统方程系数CV线性模型F=[ 1.0 1.0 0.0 0.0;0.0 1.0 0.0 0.0;0.0 0.0 1.0 1.0;0.0 0.0 0.0 1.0];G=[0.5 0.0;1.0 0.0;0.0 0.5;0.0 1.0];%事先得到整体过程的实际状态值和观测值for k = 1 : st%two equationx = F * x + G * normrnd(0,Q,2,1); %状态方程if x(1)>0 && x(3)>=0z(:,:,k) =[sqrt(x(1)^2+x(3)^2) atan(x(3)/x(1))]' + [normrnd(0,3^2,1,1) normrnd(0,0.1745^2,1,1)]'; %观测方程xobs = [xobs z(1,1,k)*cos(z(2,1,k))];yobs = [yobs z(1,1,k)*sin(z(2,1,k))];endif x(1)<0 && x(3)>=0z(:,:,k) =[sqrt(x(1)^2+x(3)^2) (atan(x(3)/x(1))+pi)]' + [normrnd(0,3^2,1,1) normrnd(0,0.1745^2,1,1)]';%观测方程xobs = [xobs z(1,1,k)*cos(z(2,1,k))];yobs = [yobs z(1,1,k)*sin(z(2,1,k))];endif x(1)<0 && x(3)<=0z(:,:,k) =[sqrt(x(1)^2+x(3)^2) (atan(x(3)/x(1))-pi)]' + [normrnd(0,3^2,1,1) normrnd(0,0.1745^2,1,1)]';%观测方程xobs = [xobs z(1,1,k)*cos(z(2,1,k))];yobs = [yobs z(1,1,k)*sin(z(2,1,k))];endif x(1)>0 && x(3)<=0z(:,:,k) =[sqrt(x(1)^2+x(3)^2) atan(x(3)/x(1))]' + [normrnd(0,3^2,1,1) normrnd(0,0.1745^2,1,1)]'; %观测方程xobs = [xobs z(1,1,k)*cos(z(2,1,k))];yobs = [yobs z(1,1,k)*sin(z(2,1,k))];endxA = [xA x(1)];yA = [yA x(3)];dl(time,k+1)= sqrt((xobs(k+1)-x(1))^2+(yobs(k+1)-x(3))^2);end%k = 0:st;%plot(xA,yA,'b*',0,0,'ro');%xlabel('x'); ylabel('y');%legend('Target Position','Observation Position');% UKFPu = [2,0,0,0;0,0.5,0,0;0,0,3,0;0,0,0,0.5].^2; %协方差矩阵初始化xgeu = x0;xgeAu = [xgeu(1)]; %后面代表的是滤波后的估计位置ygeAu = [xgeu(3)];xPru = [xgeu(1)]; %代表每一步目标的预测位置yPru = [xgeu(3)];alpha = 0.01; %0.5beta = 2;nnn = 4;kappa = -1;lamda = alpha^2*(nnn+kappa) - nnn;%一般的方法:W0=v/(v+n),Wi=0.5/(v+n),i=1,...,2n;一般(v+n)==3 %这儿n=4,v=-1;W0=-1/3,Wi=1/6wm = lamda/(nnn+lamda);wc = wm+(1+beta-alpha^2);for i = 1:2*nnnt = 1/(2*(lamda+nnn));wm =[ wm t];wc =[ wc t];endfor k = 1 : st% UKF滤波器n=4,a=0.01,b=2,r=4*0.01^2-4 ,w0m= wxx = [xgeu];Psqrtm=(chol((nnn+lamda)*Pu))';xPts=[zeros(size(Pu,1),1) -Psqrtm Psqrtm];wxx = xPts + repmat(wxx,1,2*nnn+1);for j = 1:2*nnn+1wxx(:,j) = F * wxx(:,j);xgepredu = wm(1) * wxx(:,1);for j = 2:2*nnn+1xgepredu = xgepredu + wm(j) * wxx(:,j);endxPru = [xPru xgepredu(1)]; %目标的预测位置yPru = [yPru xgepredu(3)];Pupred = Q*eye(4);for j = 1:2*nnn+1Pupred = Pupred + wc(j)*(wxx(:,j) - xgepredu)*(wxx(:,j) - xgepredu)'; end%xgeu = F * xgeu;%Pu = F * Pu * F' + G*Q*G';%wxx = [xgeu];%for j = 1:nnn% t = xgeu + sqrt(((nnn + rmda)*Pu(:,j)));% wxx = [wxx t];%end%for j =1:nnn% t = xgeu - sqrt(((nnn + rmda)*Pu(:,j)));% wxx = [wxx t];%end%Zkkfor j = 1:2*nnn+1if wxx(1,j)>0 && wxx(3,j)>=0wzz(:,:,j) = [sqrt(wxx(3,j)^2+wxx(1,j)^2) atan(wxx(3,j)/wxx(1,j))]';endif wxx(1,j)<0 && wxx(3,j)>=0wzz(:,:,j) = [sqrt(wxx(3,j)^2+wxx(1,j)^2) (atan(wxx(3,j)/wxx(1,j))+pi)]';endif wxx(1,j)<0 && wxx(3,j)<=0wzz(:,:,j) = [sqrt(wxx(3,j)^2+wxx(1,j)^2) (atan(wxx(3,j)/wxx(1,j))-pi)]';endif wxx(1,j)>0 && wxx(3,j)<=0wzz(:,:,j) = [sqrt(wxx(3,j)^2+wxx(1,j)^2) atan(wxx(3,j)/wxx(1,j))]';endendzku = wm(1) * wzz(:,:,1);for j = 2:2*nnn+1zku = zku + wm(j) * wzz(:,:,j);endPzu = R;for j = 1:2*nnn+1Pzu = Pzu + wc(j)*(wzz(:,:,j) - zku)*(wzz(:,:,j) - zku)';endPxzu = wc(1)*(wxx(:,1) - xgepredu)*(wzz(:,:,1) - zku)'; %这里的xgeu是一步预测值for j = 2:2*nnn+1Pxzu = Pxzu + wc(j)*(wxx(:,j) - xgepredu)*(wzz(:,:,j) - zku)';end%更新Ku = Pxzu*inv(Pzu);xgeu = xgepredu + Ku*( z(:,:,k) - zku);Pu = Pupred - Ku * (Pzu) * Ku'; %(Pzu)^(-1) ErrorxgeAu = [xgeAu xgeu(1)];%ygeAu = [ygeAu xgeu(3)];%de(time,k+1)=sqrt((xgeAu(k+1)-xA(k+1))^2+(ygeAu(k+1)-yA(k+1))^2);%dp(time,k+1)=sqrt((xPru(k+1)-xA(k+1))^2+(yPru(k+1)-yA(k+1))^2);end%显示跟踪曲线%k = 0:st;%figure;%plot(xA,yA,'r*-',xgeAu,ygeAu,'g+:',xobs,yobs,'b-x');%xA,yA,'b*',%xlabel('x'); ylabel('y');%legend('True','UKF','Observations');end%统计观测误差曲线与滤波误差曲线dlave=zeros(1,st+1);deave=zeros(1,st+1);dpave=zeros(1,st+1);for i=1:(st+1)dlave(i)=mean(dl(:,i));deave(i)=mean(de(:,i));dpave(i)=mean(dp(:,i));endfigure(1);i=0;plot(i,mean(dlave),'b-o',i,mean(deave),'g-*'); % ,i,mean(dpave),'r-s' figure(2);i=1:(st+1);plot(i,dlave,'b-o',i,deave,'g-*'); % ,i,dpave,'r-s'。
卡尔曼滤波在无线传感网目标跟踪定位的matlab源码实现%卡尔曼滤波自编源码实现,Kalman-CVclear all;T=1;%离线计算的矩阵for n=1:40Q1(:,:,n)=2.5^2*eye(2);Q2(:,:,n)=[3^2002^2];endF=[1T000100001T0001];G=[T^2/20T00T^2/20T];C=[10000010];%循环100次,蒙特卡洛统计for monte=1:10%初始值x(:,:,1)=[0,5,0,3]';v1(:,:,1)=[normrnd(0,1.5^2,1,1),normrnd(0,1.5^2,1,1)]';x(:,:,2)=F*x(:,:,1)+G*v1(:,:,1);%实际位置,实际的速度值z(:,:,1)=[x(1,1,1)+normrnd(0,9,1,1),x(3,1,1)+normrnd(0,4,1,1)] ';%观测值,观测到的位置z(:,:,2)=[x(1,1,2)+normrnd(0,9,1,1),x(3,1,2)+normrnd(0,4,1,1)]';%观测值,观测到的位置xe(:,:,2)=[z(1,1,2),(z(1,1,2)-z(1,1,1))/T,z(2,1,2),(z(2,1,2)-z(2,1,1))/T]';xp(:,:,1)=[0000]';xp(:,:,2)=[0000]';p(:,:,2)=[Q2(1,1,2),Q2(1,1,2)/T,0,0Q2(1,1,2)/T,2*Q2(1,1,2)/T^2,0,00,0,Q2(2,2,2),Q2(2,2,2)/T0,0,Q2(2,2,2)/T,2*Q2(2,2,2)/T^2];%卡尔曼滤波的过程for n=3:40%还是实际值和观测值v1(:,:,n-1)=[normrnd(0,1.5^2,1,1),normrnd(0,1.5^2,1,1)]';x(:,:,n)=F*x(:,:,n-1)+G*v1(:,:,n-1);%实际位置,实际的速度值z(:,:,n)=[x(1,1,n)+normrnd(0,9,1,1),x(3,1,n)+normrnd(0,4,1,1)] ';%观测值,观测到的位置%开始滤波xp(:,:,n)=F*xe(:,:,n-1);a(:,:,n)=z(:,:,n)-C*xp(:,:,n);pt(:,:,n)=F*p(:,:,n-1)*F'+G*Q1(:,:,n-1)*G';A(:,:,n)=C*pt(:,:,n)*C'+Q2(:,:,n);K(:,:,n)=pt(:,:,n)*C'*inv(A(:,:,n));xe(:,:,n)=xp(:,:,n)+K(:,:,n)*a(:,:,n);p(:,:,n)=(eye(4)-K(:,:,n)*C)*pt(:,:,n);end%为展示跟踪曲线做准备for i=1:30xtr(i)=x(1,1,i);ytr(i)=x(3,1,i);px(i)=xp(1,1,i);py(i)=xp(3,1,i);ex(i)=xe(1,1,i);ey(i)=xe(3,1,i);zx(i)=z(1,1,i);zy(i)=z(2,1,i);end%计算每一次循环的滤波后的每一采样时刻的预测误差与估计误差,并为下面求所有这些次仿真的各采样时刻的误差平均值做准备for k=1:40dp(k,monte)=sqrt((x(1,1,k)-xp(1,1,k))^2+(x(3,1,k)-xp(3,1,k))^2);de(k,monte)=sqrt((x(1,1,k)-xe(1,1,k))^2+(x(3,1,k)-xe(3,1,k))^2);dl(k,monte)=sqrt((x(1,1,k)-z(1,1,k))^2+(x(3,1,k)-z(2,1,k))^2);endend%求所有这些次仿真的各采样时刻的误差平均值,并展示误差曲线for j=1:40ave_dp(j)=mean(dp(j,:));ave_de(j)=mean(de(j,:));ave_dl(j)=mean(dl(j,:));endave_total_dp=mean(ave_dp);ave_total_de=mean(ave_de);ave_total_dl=mean(ave_dl);step=1:40;plot(step,ave_dp,'r-*',step,ave_de,'b-o',step,ave_dl,'g-d'); %查看跟踪轨迹px,py,'k-+',%figure(1)%plot(xtr,ytr,'r-*',zx,zy,'g-d',ex,ey,'b-o')。
关于无线传感器网络定位算法仿真何涛;包亮强;赵长财【摘要】Aiming at wireless sensor networks(WSNs)node localization problem,a new localization algorithm is proposed by building quantum neural network model for particle swarm mechanism to optimize localization algorithm of DV-HOP,particle swarm optimization-quantum neutral network(PSO-QNN). The algorithm constructs quantum neural network model according to average distance obtained by traditional DV-HOP and distance of measured actual node,and through the particle swarm algorithm to train the average distance,so as to get better average,value to achieve the optimization of DV-HOP algorithm. The combination algorithm shortens the training time of the traditional artificial neural network,and speeds up the convergence rate. Simulation results show that compared with the traditional DV-HOP algorithm,the proposed PSO-QNN algorithm can reduce the positioning error of about 20%,and the positioning precision is significantly improved.%针对无线传感器网络(WSNs)节点定位的问题,提出了一种通过构建粒子群机制的量子神经网络模型优化距离矢量跳跃(DV-HOP)的定位算法(PSO-QNN),根据传统DV-HOP所得到的平均距离和实测节点距离构建量子神经网络模型,并通过粒子群算法对平均距离进行训练,从而得到较优平均值,实现了对DV-HOP算法的优化.算法缩短了传统人工神经网络的训练时间,并且加快了收敛速度.仿真结果表明:与传统DV-HOP算法相比,所提出的PSO-QNN算法能够减少约20%的定位误差,定位精度显著提高.【期刊名称】《传感器与微系统》【年(卷),期】2017(036)011【总页数】5页(P143-146,150)【关键词】无线传感器网络;量子神经网络;粒子群优化算法;距离矢量跳跃算法【作者】何涛;包亮强;赵长财【作者单位】兰州交通大学自动化与电气工程学院,甘肃兰州730070;卡斯柯信号有限公司,上海200071;兰州交通大学电子与信息工程学院,甘肃兰州730070【正文语种】中文【中图分类】TP393近年来,无线传感器网络(wireless sensor networks, WSNs)的研究成果在环境检测、目标跟踪、军事等领域广泛使用[1]。