MSP430串口通信讲解
- 格式:doc
- 大小:1.38 MB
- 文档页数:5
基于MSP430的模拟SPI串口通信的实现MSP430是德州仪器(Texas Instruments)公司生产的一款微控制器,内置有模拟外设接口和数字外设接口,非常适合用于嵌入式系统的开发。
SPI(Serial Peripheral Interface)是一种同步串行通信协议,常用于微控制器之间的通信。
在基于MSP430的模拟SPI串口通信实现中,我们需要使用MSP430的GPIO(General-Purpose Input/Output)外设模拟SPI通信协议的时序。
以下是基于MSP430的模拟SPI串口通信实现的步骤:1.配置MSP430的GPIO口为输出模式,并将片选信号(CS)、时钟信号(CLK)、主设备输入信号(MISO)设置为低电平,主设备输出信号(MOSI)设置为高电平。
2.配置MSP430的GPIO口中的片选信号(CS)为输出模式,并将其设置为高电平。
3.编写SPI通信的初始化函数,设置SPI的参数,如时钟分频比、数据位长度等。
4.实现SPI通信的发送函数。
将待发送的数据放入发送缓冲区,按照SPI通信协议的时序,通过MSP430的GPIO口将数据逐位发送出去。
5.实现SPI通信的接收函数。
按照SPI通信协议的时序,通过MSP430的GPIO口接收从外设传入的数据,并存储到接收缓冲区。
6.实现SPI通信的片选控制函数。
控制片选信号的输出,使得与其他外设通信时只选中对应的外设。
7.在主函数中调用上述SPI通信的功能函数,进行数据的发送和接收。
需要注意的是,以上步骤仅是基于MSP430的模拟SPI串口通信实现的一般步骤,具体的实现细节还需根据具体的硬件设备和通信协议来进行调整。
总结起来,基于MSP430的模拟SPI串口通信的实现主要包括配置GPIO口、初始化SPI通信参数、实现发送和接收函数,以及控制片选信号的输出等步骤。
通过这些步骤的完成,可以实现MSP430与其他外设之间的SPI串口通信。
单片机MSP430与PC机串口通讯设计一、引言串口通信是指通过串行通信接口进行数据传输的一种通信方式。
单片机MSP430和PC机的串口通信设计可以实现二者之间的数据传输和通信交互。
本文将从串口介绍、硬件设计和软件实现等方面详细介绍该设计。
二、串口介绍串口是一种串行通信接口,常用的有RS232和RS485等。
RS232是一种使用较为广泛的串口通信协议。
RS232接口有三根线,分别为发送线Tx、接收线Rx和地线GND。
该协议规定,发送端与接收端之间的电平差为±3至±15V,其中正电平表示逻辑0,负电平表示逻辑1三、硬件设计1.MSP430硬件设计MSP430是一种低功耗的专用于嵌入式应用的16位RISC微控制器。
它具有丰富的外设资源,包括多个通用输入输出引脚(GPIO)和两个USART (UART)接口。
其中一个USART接口用于将MSP430与PC机连接。
2.PC机硬件设计PC机通过串口连接到MSP430。
首先,需要将PC机的串口RS232转换为TTL电平,即RS232转TTL电平转换器。
其次,将转换后的TTL电平通过杜邦线连接至MSP430的USART接口的Tx和Rx引脚。
四、软件实现1.MSP430软件设计(1)串口初始化:设置数据位长度、停止位、奇偶校验等。
(2)发送数据:将要发送的数据存入发送缓冲区,并使能发送中断。
(3)接收数据:开启接收中断,并将接收到的数据存入接收缓冲区。
(4)中断处理:发送中断和接收中断时,分别从发送缓冲区和接收缓冲区读取数据并发送/接收。
2.PC机软件设计(1)打开串口:设置串口参数,如波特率、数据位长度等。
(2)发送数据:向串口发送数据,可以通过打开的串口进行写入。
(3)接收数据:使用轮询或中断方式读取串口接收到的数据。
五、总结与展望本文详细介绍了单片机MSP430与PC机串口通信设计,主要包括了串口介绍、硬件设计和软件实现。
通过串口通信,MSP430和PC机可以实现数据传输和通信交互,从而满足各种嵌入式应用的需求。

MSP430--UART模块UART 是通用异步串行接口的简称。
串行通信接口是用来与单片机外界系统进行通信桥梁,比如可以吧单片机ADC 转换的数据通过串口发送给PC 机(上位机),经上位机处理之后在发回给单片,达到通信的目的。
TI 公司的MSP430 系列单片机均具有UART 功能,其中大部分还和SPI,I2C 功能复用,通过相关寄存器的配置,可以很轻松地就实现了UART,SPI,I2C 的通信功能。
在此以MSP430x149 为例介绍UART 功能及其实现过程。
1.异步通信的结构:2.UART 数据格式(数据协议):异步通信再不发送数据的时候,通信线路上总是呈现高电平状态,称为空闲状态。
当有数据发送是,信号线变成低电平,并持续一位的时间用于表示发送字符的开始,该为称为起始位。
起始位之后在信号线上依次出现发送的数据。
起始位,数据位由高到低7/8 位,地址位0/1 位,奇偶校验位奇偶或无,停止位1/2 位。
数据位位数、地址位、奇偶校验位、停止位均可由单片机内部寄存器控制;这款单片机都有两个USART 模块,有两套独立的寄存器组;以下寄存器命中出现x 代表0 或是1,0 代表对应0 模块的寄存器,1 代表对应1 模块的寄存器;其中,与串口模式设置相关的控制位都位于UxCTL 寄存器,与接收相关的控制位都位于UxRCTL 寄存器,与发送相关的控制位都位于UxTCTL 寄存器;波特率设置用UxBR0、UxBR1、UxMCTL 三个寄存器;接收与发送有独立的缓存UxRXBUF、UxTXBUF,并具有独立的移位寄存器和独立的中断;中断允许控制位位于IE1/2 寄存器,中断标志位位于IFG1/2 寄存器。
3.波特率设置:430 的波特率设置用三个寄存器实现:UxBR0:波特率发生。
MSP430波特率的计算给定一个BRCLK时钟源,波特率用来决定需要分频的因子N:N = fBRCLK/Baudrate分频因子N通常是非整数值,因此至少一个分频器和一个调制阶段用来尽可能的接近N。
如果N等于或大于16,可以设置UCOS16选择oversampling baud Rate模式注:Round():指四舍五入。
Low-Frequency Baud Rate Mode Setting在low-frequency mode,整数部分的因子可以由预分频实现:UCBRx = INT(N)小数部分的因子可以用下列标称公式通过调制器实现:UCBRSx = round( ( N –INT(N) ) × 8 )增加或减少UCBRSx一个计数设置,对于任何给定的位可能得到一个较低的最高比特误码率。
如果确定是这样的情况UCBRSx设置的每一位必须执行一个精确的错误计算。
例1:1048576Hz频率下驱动以115200波特率异步通讯ACLK = REFO = ~32768Hz, MCLK = SMCLK = default DCO = 32 x ACLK = 1048576Hz。
N = fBRCLK/Baudrate = 1048576/115200 = ~9.10UCBRx = INT(N) = INT(9.10) = 9UCBRSx = round( ( N –INT(N) )×8 )= round( ( 9.10 –9) × 8 )=round(0.8 )=1UCA0CTL1 |= UCSSEL_2;// 选SMCLK为时钟UCAxBR0 = 9;UCAxBR1 = 0;UCAxMCTL = 0x02;//7-4:UCBRFx,3-1:UCBRSx,0:UCOS16UCBRSx 为寄存器UCAxMCTL的1-3位,所以写入0x02(00000010)例2:32768Hz频率下驱动以2400波特率异步通ACLK = REFO = ~32768Hz, MCLK = SMCLK = DCO ~1.045MHzN = fBRCLK/Baudrate = 32768/2400 = ~13.65UCBRx = INT(N) = INT(13.65) = 13UCBRSx = round( ( N –INT(N) )×8 )= round( ( 13.65 –13) × 8 )=round(5.2)=5UCA0CTL1 |= UCSSEL_1; // 选ACLK为时钟UCAxBR0 = 13;UCAxBR1 = 0 ;UCAxMCTL = 0x0A;//7-4:UCBRFx,3-1:UCBRSx,0:UCOS16UCBRSx为寄存器UCAxMCTL的1-3位,所以写入0x0A(00001010)Oversampling Baud Rate Mode Setting在oversampling mode 与分频器设置如下:UCBRx = INT(N/16)第一个调制阶段设置如下:UCBRFx = round( ( (N/16) –INT(N/16) ) × 16 )当要求更精确时,UCBRSx也可以被设置成0-7。
MSP430串口波特率的设置与计算
波特率是指每秒钟传输的位数,单位为波特(bps)。
在MSP430中,我们可以通过计算和设置分频器的值来实现不同的波特率。
下面是计算MSP430串口波特率的步骤:
1.确定MSP430的工作频率。
2.确定所需的波特率。
3.根据波特率和工作频率的关系,计算出分频系数的值。
4.将计算得到的分频系数的低8位和高8位写入UCAxBR0和UCAxBR1寄存器。
例如,假设MSP430的工作频率为16MHz,我们想要设置的波特率为9600bps,那么计算步骤如下:
1.工作频率为16MHz。
2. 波特率为9600bps。
4. 将BRx的值分解为低8位和高8位。
假设取整数部分为104,小数部分取0.1667乘以256,得到43、则UCAxBR0的值为43,UCAxBR1的值为0。
将这两个值写入寄存器即可设置波特率为9600bps。
需要注意的是,不同型号的MSP430可能有不同的时钟源和分频系数的范围。
在设置波特率时,应查阅相关的芯片手册或数据表,对相应的寄存器进行设置。
总结起来,MSP430串口波特率的设置与计算包括确定工作频率,确定所需波特率,计算分频系数,写入寄存器。
通过合适的设置,可以实现稳定和准确的串口通信。
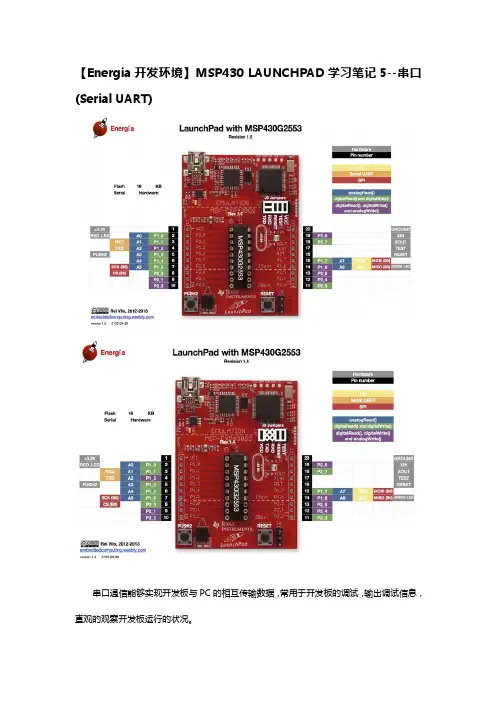
【Energia开发环境】MSP430LAUNCHPAD学习笔记5--串口(Serial UART)串口通信能够实现开发板与PC的相互传输数据,常用于开发板的调试,输出调试信息,直观的观察开发板运行的状况。
对于MSP430G2553的串口,需要注意的是由于LAUNCHPAD的版本不同,有1.4和1.5两个版本,如上图。
1.5版本的LAUNCHPAD可以在调试时直接使用硬件UART与电脑通信。
这次实验所使用的芯片型号为G2553,在包装和里也有G2452的芯片,所以要看清楚你所使用的是哪个芯片。
如果你手上正好有一块G25531.5版本的LAUNCHPAD,那就方便多了。
LAUNCHPAD板子上的仿真器串口最大通信速率为9600baud,我们在写程序的时候最好不要超过这个数值。
我们先来做个简单的串口实验:编写完程序后,连上板子,查看软件是否已正常连接开发板,然后下载程序。
常用函数:Serial.begin(speed):这个函数是对波特率的设定,常有的波特率有300,600,1200,2400, 4800,9600,14400,19200,28800,38400,57600,11520这些。
这里使用是9600baud。
print(val):在串口发送数据的时候,会将其转换为人类可阅读的ASCII字符。
∙Serial.print(78)输出"78"∙Serial.print(1.23456)输出"1.23"∙Serial.print('N')输出"N"∙Serial.print("Hello world.")输出"Hello world."也可以在print(val,format)中加入第二个参数,如:∙Serial.print(78,BIN)输出"1001110"∙Serial.print(78,OCT)输出"116"∙Serial.print(78,DEC)输出"78"∙Serial.print(78,HEX)输出"4E"∙Serial.println(1.23456,0)输出"1"∙Serial.println(1.23456,2)输出"1.23"∙Serial.println(1.23456,4)输出"1.2346"Serial.println(val,format)是print(val,)的加强版,只是在print生成的字符串后面加一个”\n”作为换行符。

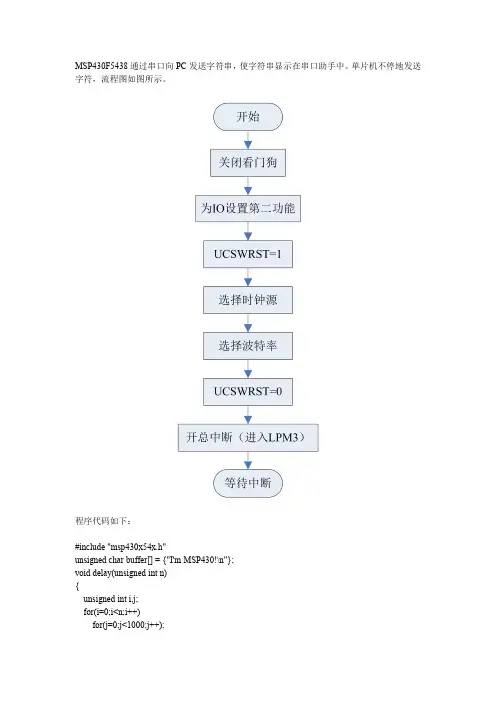
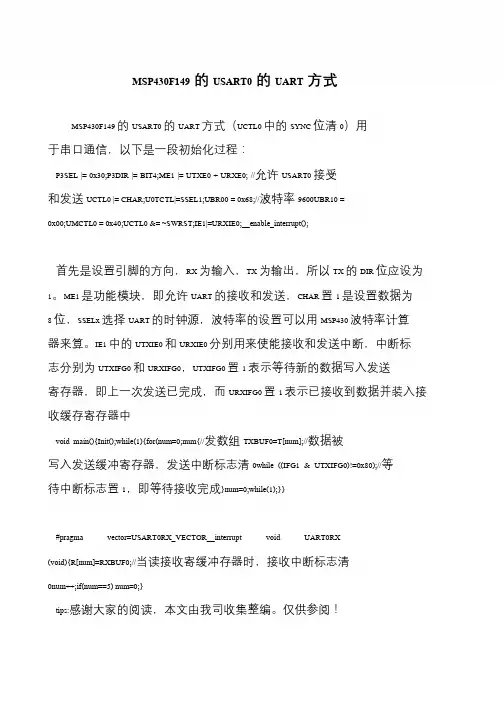
MSP430F149的USART0的UART方式MSP430F149 的USART0 的UART 方式(UCTL0 中的SYNC 位清0)用于串口通信,以下是一段初始化过程:P3SEL |= 0x30;P3DIR |= BIT4;ME1 |= UTXE0 + URXE0; //允许USART0 接受和发送UCTL0 |= CHAR;U0TCTL|=SSEL1;UBR00 = 0x68;//波特率9600UBR10 = 0x00;UMCTL0 = 0x40;UCTL0 &= ~SWRST;IE1|=URXIE0;__enable_interrupt();首先是设置引脚的方向,RX 为输入,TX 为输出,所以TX 的DIR 位应设为1。
ME1 是功能模块,即允许UART 的接收和发送,CHAR 置1 是设置数据为8 位,SSELx 选择UART 的时钟源,波特率的设置可以用MSP430 波特率计算器来算。
IE1 中的UTXIE0 和URXIE0 分别用来使能接收和发送中断,中断标志分别为UTXIFG0 和URXIFG0,UTXIFG0 置1 表示等待新的数据写入发送寄存器,即上一次发送已完成,而URXIFG0 置1 表示已接收到数据并装入接收缓存寄存器中void main(){Init();while(1){for(num=0;num{//发数组TXBUF0=T[num];//数据被写入发送缓冲寄存器,发送中断标志清0while ((IFG1 & UTXIFG0)!=0x80);//等待中断标志置1,即等待接收完成}num=0;while(1);}}#pragma vector=USART0RX_VECTOR__interrupt void UART0RX (void){R[num]=RXBUF0;//当读接收寄缓冲存器时,接收中断标志清0num++;if(num==5) num=0;}tips:感谢大家的阅读,本文由我司收集整编。
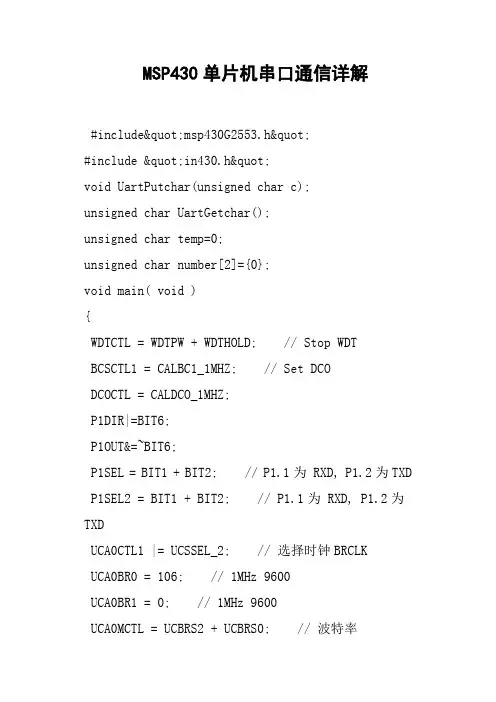
MSP430单片机串口通信详解#include"msp430G2553.h"#include "in430.h"void UartPutchar(unsigned char c);unsigned char UartGetchar();unsigned char temp=0;unsigned char number[2]={0};void main( void ){WDTCTL = WDTPW + WDTHOLD; // Stop WDTBCSCTL1 = CALBC1_1MHZ; // Set DCODCOCTL = CALDCO_1MHZ;P1DIR|=BIT6;P1OUT&=~BIT6;P1SEL = BIT1 + BIT2; // P1.1为 RXD, P1.2为TXD P1SEL2 = BIT1 + BIT2; // P1.1为 RXD, P1.2为TXDUCA0CTL1 |= UCSSEL_2; // 选择时钟BRCLKUCA0BR0 = 106; // 1MHz 9600UCA0BR1 = 0; // 1MHz 9600UCA0MCTL = UCBRS2 + UCBRS0; // 波特率=BRCLK/(UBR+(M7+...0)/8)UCA0CTL1 &= ~UCSWRST;// 初始化顺序:SWRST=1设置串口,然后设置SWRST=0,最后设置相应中断IE2 |= UCA0RXIE; // 使能接收中断while(1){//UartPutchar(9);// display_int(temp,0);__delay_cycles(10000);}}/**********************************UART接收中断*************************/#pragma vector=USCIAB0RX_VECTOR__interrupt void USCI0RX_ISR(void){//while (!(IFG2&UCA0TXIFG)); // 等待发送完成 //UCA0TXBUF = UCA0RXBUF; // TX ->; RXed charactertemp=UCA0RXBUF;}/******************************UART发送字节函数*************************/void UartPutchar(unsigned char c){while(!(IFG2 & UCA0TXIFG)); //待发送为空UCA0TXBUF=c;IFG2 &=~UCA0RXIFG;}/*********************************UART接收字节数据******************/unsigned char UartGetchar(){unsigned char c;while(!(IFG2 & UCA0RXIFG)); //等待接收完成c=UCA0RXBUF;IFG2 &=~UCA0TXIFG;return c;}/******智能控制工作室*******/MSP430g2553串口通信MSP430的不同型号,其串行通讯工作模式是一样的。

MSP430F5438USCI模块的详细介绍MSP430F5438是一款德州仪器(TI)推出的超低功耗微控制器,搭载了USCI模块,提供多种通信接口,包括UART、SPI和I2C。
本文将详细介绍MSP430F5438的USCI模块的特性和应用。
USCI模块在MSP430F5438上有两个实例,分别称为USCI_A和USCI_B。
每个实例都可以配置为UART、SPI或I2C模式,提供相应的寄存器和功能。
以下将分别介绍每个实例的特性和应用。
CI_A模块:USCI_A模块是一个通用的串行通信模块,可配置为UART、SPI或I2C模式。
它提供了几个寄存器和功能,用于配置串口参数、接收和发送数据。
在UART模式下,USCI_A可以实现异步串行通信,支持多种波特率和数据格式。
在SPI模式下,它可以与其他设备进行高速的全双工通信,支持主从模式和多主模式。
在I2C模式下,USCI_A可以作为主设备或从设备,与其他I2C设备进行双向通信。
应用方面,USCI_A模块可用于实现与外部设备的通信,如串行打印机、传感器、外部存储器等。
通过UART模式,MSP430F5438可以与PC进行通信,进行数据传输和远程调试。
通过SPI模式,可以与其他MSP430微控制器或外部器件进行高速数据传输,如液晶显示屏、无线模块等。
通过I2C模式,可以与其他I2C设备(例如传感器、实时时钟等)进行双向通信,实现数据采集和控制。
CI_B模块:USCI_B模块也是一个通用的串行通信模块,可配置为UART、SPI或I2C模式。
它与USCI_A模块类似,提供了相应的寄存器和功能,用于配置通信参数和执行数据传输。
在UART模式下,USCI_B支持多种波特率、数据格式和校验方式。
在SPI模式下,它支持全双工通信和多种传输模式。
在I2C模式下,USCI_B可以作为主设备或从设备,与其他I2C设备进行双向通信。
应用方面,USCI_B模块与USCI_A模块相似,可应用于串行通信和外设接口。
msp430串口波特率设置说明
TI MSP430系列单片机,usart模块的波特率值设定是通过以下三个寄存器决定的:UxBR0,UxBR1,UxMCTL
波特率=BRCLK/N ,主要是计算出N。
BRCLK:时钟源,可以通过寄存器设定何为时钟源; 通过寄存器UCAxCTL1的SSEL两位选择,01:ACLK,02:SMCLK
N:波特率产生的分频因子。
N=UxBR1+UxBR0+UxMCTL,其中UxBR1+UxBR0为整数部分,UxMCTL为设定小数部分,其中UxBR1为高位,UxBR0为低位,两者结合起来为一个16位的字。
举例说明:波特率=115200,时钟源=8MHz ,为外部晶体振荡器
N=8000000/115200=69.44 。
即UxBR1=0,UxBR0=0x45,首先把小数部分0.44×8,即3.52,取整后为3。
这个3表示在UxMCTL中的8位里要有3个1,并且,UxMCTL分为First Stage Modulation和Second Stage Modulation,也就是前者为高4位,取值范围0-F,后者为低4位,注意后4位最好选择偶数。
把上步的到的小数部分取整后的数值分散到高位和低位,如3,可以写为0x16。
学习笔记-CCS-MSP430F5529[快速⼊门篇⼆] 由于2021的全国电赛延期了,从今天开始打算好好整理⼀下使⽤CCS编程的经验,本篇笔记会好好整理⼀下我备赛期间⽤CCS写的程序,包括外部中断,定时器部分的定时中断,定时器输⼊捕获,PWM波输出,UART,OLED(IIC),MPU6050,内容涵盖了硬件和软件部分。
鉴于笔者⽔平有限和能⼒不⾜,⽂中有不到之处还请看者多包涵,我的⼯程源代码链接会在⽂章末尾贴出。
先贴⼀张peripheral图,MSP430的外部引脚及其复⽤功能都可在图⾥查到。
⼀·外部中断 外部中断的操作⽅式与GPIO⼀样是使⽤寄存器操作,所以学习相关的寄存器是不可避免的,不过MSP430的寄存器不算太多,操作外部中断主要要⽤到以下寄存器:1.PxIV 中断向量表(字),P1端⼝的中断函数⼊⼝地址应该都放在⾥⾯,只是⼀个地址;2.PxIE 中断使能寄存器,相应引脚位置1表⽰允许产⽣中断;置0表⽰该引脚不产⽣中断;3.PxIES 中断触发⽅式选择寄存器,相应引脚位置1表⽰下降沿触发,置0表⽰上升沿触发;4.PxIFG 中断标志,由于MSP430的中断使能需要使能总中断,所以仅当总中断GIE和中断使能寄存器PxIE都打开后,PxIFG⾼电平表⽰有中断请求等待待响应,等中断服务函数结束时需要软件清该标志位; 这些寄存器在TI的msp430f5xx_6xxgeneric.h头⽂件有如下定义下⾯看⼀个外部中断程序,所⽤引脚为P2.1,对应MSP430F5529⽕箭板的板载按键S1,初始化为下降沿触发void EXTI_Init(){/*按键中断*/P2IE |= BIT1; //P2.1中断使能P2IES |= BIT1; //设置为下降沿触P2IFG &= ~BIT1; //清中断标志位P2REN |= BIT1; //上拉电阻P2OUT |= BIT1; //初始化置⾼}/*中断服务函数*/#pragma vector=PORT2_VECTOR__interrupt void P2_ISR(void){if(P2IFG & BIT1){delay(2); //延时2ms消抖动/*这⾥是函数算法部分*/}P2IFG &=~BIT1; //清空中断标志}⼆·定时器MSP430的定时器资源还算丰富,共有两类共四个定时器,分别是3个TimerA和1TimerB,由于我对TimerA使⽤较多,所以本⽂着重来讲TimerA,三个TimerA分别为Timer0_A(5个捕获/⽐较寄存器),Timer1_A(3个捕获/⽐较寄存器),Timer2_A(3个捕获/⽐较寄存器),下⾯是TimerA的结构图我们结合TimerA的寄存器讲解⼀下这张图上半部分是整个定时器的基础,整个上半部分可通过TACTL控制寄存器来编程,从功能⾓度来讲从左往右分别是,⾃⾝时钟源配置TASSEL,第⼀次分频选择ID,定时器清零位TACLR,计数值存放寄存器TAR,⼯作模式控制位MC,中断标志位TAIFG以及没有在结构图出现的定时器中断使能TAIE。
串行通信接口是处理器与外界进行数据传输最常用的方式之一。
顾名思义,串行通信是指使用一条数据线,将数据一位一位地依次传输,每一位数据占据一个固定的时间长度。
与并行通信相比,串行通信速度较慢,但占用更少的I/O 资源,只需要少数几条线就可以在系统间交换信息,特别适用于计算机与计算机、计算机与外设之间的远距离通信。
串行通信可以分为同步通信和异步通信两种类型。
如果带有同步时钟,则称为同步串行
通信,如常用的 SPI 和 I2C 接口就属于同步串行通信接口。
如果没有同步时钟,依靠严格的时间间隔来传输每一比特,则称为异步串行通信。
MSP430 系列单片机有两种串行通信接口,较早的 USART 模块和较新的 USCI 模块。
同步通信方式,是把许多字符组成一个信息组,这样,字符可以一个接一个地传输。
但是,在每组信息(通常称为信息帧)的开始要加上同步字符,在没有信息要传输时,要填上空字符,因为同步传输不允许有间隙。
同步方式下,发送方除了发送数据,还要传输同步时钟信号,信息传输的双方用同一个时钟信号确定传输过程中每1位的位置。
在异步通信方式中,两个数据字符之间的传输间隔是任意的,所以,每个数据字符的前后都要用一些数位来作为分隔位。
MSP430G2553单片机USCI模块原理图
串口通信所需配置:
1、时钟选择——以SMCLK时钟频率为1MHz为例。
①选择SMCLK为串口通信频率。
(P95页)
②设置SMCLK时钟频率为1MHz。
需要设置的寄存器:UCA0CTL1;(P95页)。
2、IO口定义为第二功能,即串口发送接收端口。
需要设置的寄存器:P1SEL|=BIT1+BIT2;,P1SEL2|=BIT1+BIT2;(中文P44页)。
2、数据传输格式
本次实验数据格式设置为:
1位起始位8位数据位无奇偶校验1为停止位
需要设置的寄存器:UCA0CTL0(P94页)
3、设置波特率,以9600为例。
需要设置的寄存器:UCA0BR0,UCA0BR1,UCA0MCTL。
(P96页)。
4、开启串口通信功能。
使能串口接收中断及总中断
需要设置的寄存器:UCA0CTL1(P95页),IE2(P99页)。
5、编写中断程序。