手把手教你做四足步行机器人
- 格式:doc
- 大小:992.00 KB
- 文档页数:27
四足机器人控制算法
四足机器人的控制算法涉及到多个方面,包括步态生成、运动规划、力矩控制等。
下面是一般用于四足机器人控制的一些基本算法:
1. 步态生成算法:
-行走周期:确定每步的时间周期。
-支撑相和摆动相:在一个步态周期中,确定哪些腿是支撑在地面上的,哪些腿是摆动的。
2. 运动规划算法:
-逆运动学:确定每个关节角度,以实现期望的末端效应器的位置。
-前馈控制:根据期望的运动轨迹,预测并施加相应的力或力矩,以优化运动。
3. 传感器融合:
-使用传感器(例如惯性测量单元、摄像头等)获取机器人周围环境的信息,以调整步态和避免碰撞。
4. 力矩控制算法:
- PID控制:使用比例、积分和微分项来调整关节力矩,以实现期望的运动。
-模型预测控制(MPC):基于机器人的动力学模型进行预测,然后优化控制输入,以最小化误差。
5. 路径规划和避障算法:
-确保机器人在执行任务时能够避开障碍物,包括静态和动态障碍物。
-可以使用基于地图的路径规划算法,如A*算法,或者利用传感器信息实时规划路径。
6. 学习算法:
-强化学习:使用强化学习算法,例如深度强化学习(DRL),来优化步态和运动规划。
-监督学习:通过示例数据进行监督学习,提高机器人在不同任务上的性能。
需要注意的是,四足机器人的控制算法通常是一个复杂的系统,需要综合考虑机器人的动力学、传感器信息、任务需求等多个因素。
同时,实际应用中可能需要不同的算法组合,具体的选择也取决于机器人的设计和应用场景。

四足机器人控制算法--建模、控制与实践
四足机器人是一种能够模仿动物行走方式的机器人。
但是,与两足机器人相比,四足
机器人更加稳定可靠。
四足机器人的控制算法是将动物的行走模式通过计算机模拟出来,
然后对机器人进行控制。
本文将从建模、控制和实践三个方面介绍四足机器人控制算法。
建模
四足机器人的建模包括两个方面:机械建模和运动学建模。
机械建模是将机器人的各
个部件进行建模,包括每个腿部的关节,以及身体的结构等。
运动学建模是建立机器人在
三维空间内的位置、速度和加速度之间的关系。
运动学参数通常包括机器人各个部位的欧
拉角、角速度和加速度等。
控制
四足机器人的控制可以分为开环控制和闭环控制两种。
在开环控制中,机器人的运动
由预先编程的接口程序来控制。
在闭环控制中,机器人将其自身状态与目标状态进行比较,然后对其行动进行调整。
通常,闭环控制需要使用传感器获取机器人的当前状态,例如机
器人的位置和方向信息。
实践
在实践中,四足机器人的运动可以通过在计算机模拟中进行测试,然后通过机器人的
执行反馈进行优化。
在实际应用中,四足机器人通常用于监测地震、火灾等重大灾难发生
时的状况。
此外,四足机器人还可以用于探索较大的环境,以及执行军事任务等。
总结
四足机器人的控制算法包括建模、控制和实践三个方面。
在建模方面,需要对机械、
运动学进行建模。
在控制方面,可以采用开环控制或闭环控制两种方法进行控制。
在实践中,可以通过计算机模拟来优化机器人的运动,然后将其应用于实际环境。
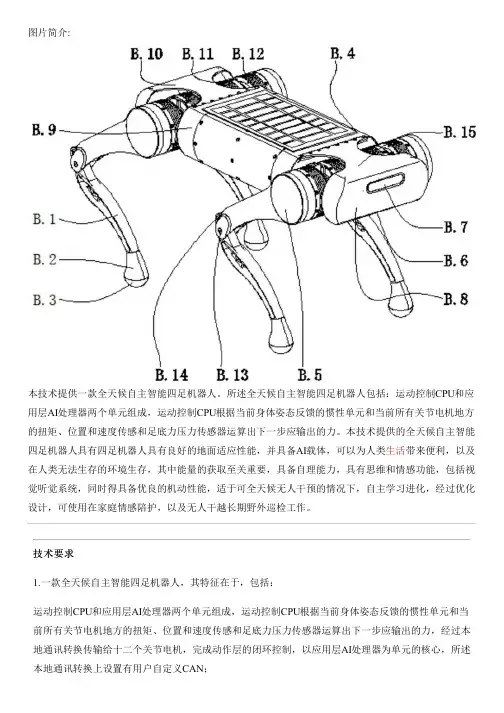
图片简介:本技术提供一款全天候自主智能四足机器人。
所述全天候自主智能四足机器人包括:运动控制CPU和应用层AI处理器两个单元组成,运动控制CPU根据当前身体姿态反馈的惯性单元和当前所有关节电机地方的扭矩、位置和速度传感和足底力压力传感器运算出下一步应输出的力。
本技术提供的全天候自主智能四足机器人具有四足机器人具有良好的地面适应性能,并具备AI载体,可以为人类生活带来便利,以及在人类无法生存的环境生存,其中能量的获取至关重要,具备自理能力,具有思维和情感功能,包括视觉听觉系统,同时得具备优良的机动性能,适于可全天候无人干预的情况下,自主学习进化,经过优化设计,可使用在家庭情感陪护,以及无人干越长期野外巡检工作。
技术要求1.一款全天候自主智能四足机器人,其特征在于,包括:运动控制CPU和应用层AI处理器两个单元组成,运动控制CPU根据当前身体姿态反馈的惯性单元和当前所有关节电机地方的扭矩、位置和速度传感和足底力压力传感器运算出下一步应输出的力,经过本地通讯转换传输给十二个关节电机,完成动作层的闭环控制,以应用层AI处理器为单元的核心,所述本地通讯转换上设置有用户自定义CAN;电源管理系统,所述电源管理系统分别与所述运动控制CPU和所述应用层AI处理器的输入端电性连接,所述电源管理系统负责管理锂电池的有线无线充电系统,所述电源管理系统的输入端设置有太阳能充电系统,用于备用;视觉和听觉单元,所述视觉和听觉单元连接于所述应用层AI处理器的一端,视觉和听觉单元负责处理视觉听觉情感进化系统所需要的大量神经网络单元;显示单元,所述显示单元的输入端连接于所述应用层AI处理器的一端,用于通过应用层AI处理器处理一些不紧急的事务;GPS单元,所述GPS单元的一端连接于所述应用层AI处理器的一端;异常检测保护,所述异常检测保护设置于所述电源管理系统上,所述电源管理系统上设置有无线紧急通知保护,所述电源管理系统上设置有用户外扩电源接口;单按键无线急停发射器,所述单按键无线急停发射器通过无线连接于所述无线紧急通知保护;主体由尾部保护盖、面部端盖、电机保护壳和太阳能装置的组成身躯腔体部分,以及四条腿部组成,其中每条腿上具备三个动力单元分别控制大腿侧摆,大腿前后,和小腿的伸缩,动力单元组成;机器视觉部分由图底部相机和面部相机完成;其中,太阳能装置为部分机身外置太阳能电源板或者整个机身上壳为太阳能电池基板结构。
大学专业实践课题:四足追光机器人姓名:学院:机械工程学院专业:机械设计制造及其自动化班级:学号:指导教师:四足追光机器人一、实验目的用“创意之星"机器人套件组装可以进行追光行走的四足机器人;二、实验套件(创意之星)1。
机械结构:基本结构件、舵机动力关节、可转向轮子、机械爪等;2.控制系统:控制卡、舵机、直流电机、各类传感器、电源等;3。
控制软件:NorthSTAR 图形化开发环境三、实验步骤1、确定其基本功能基本功能:a.在平地上通过步态设计,可以正常迈步行走.同时头部传感器检测前方光源,便于及时调整运行动作,追光行走。
b.当左侧红外线传感器检测到光源强于右侧红外线传感器检测到的光源时,机器人运行步态会改变,控制机器人左转.右侧的光源强于左侧的光源时用同样的原理控制机器人右转。
c.当两侧均检测到光源亮度相等时,调整步态,追光机器人会向前走。
直至检测不到光源停止,再控制向后退.2、机构设计整个巡视机器人由大致三个模块组成:a。
由8个舵机组成四足机器人的4条腿模块;b。
由2个舵机组成四足机器人尾部部分;c。
由2个红外接近传感器和1个舵机组成的感应模块。
3、机构的装配整个四足避障机器人由1个控制板,1个舵机和两个红外接近传感器组成可转动头部,8个舵机组成主要的4条机械腿,由两个舵机构成尾部部分。
整个四足机器人共由11个舵机、两个红外接近传感器及“创意之星”机器人零部件组成。
安装可分为零件的安装,部件的组装以及最后的总装过程。
根据预先设计好的机器人结构方案,组装四条腿的部件、头部、尾部以及机器人主体部分,最后组装到一块,形成完整的整体结构.4、连接电线由于我们此次使用的是创意之星的标准套件,舵机接线、传感器模拟与数字端口的连接都及其方便简单.5、设置各个舵机的限制参数一方面保护所使用器件的性能,防止过载或错误操作而将其损坏;另一方面也为我们进行各种复杂的调试做良好的准备,能够顺利的完成设计任务。
四足机器人动力学建模:拉格朗日动力学引言在机器人领域中,四足机器人是一种常见的机器人类型。
它们具有四条腿和能够模拟和模仿动物行走的能力。
为了实现自主步行和平稳运动,我们需要对四足机器人的动力学进行建模和分析。
本文将介绍使用拉格朗日动力学方法对四足机器人进行建模的过程和步骤。
拉格朗日动力学简介拉格朗日动力学是一种描述系统动力学行为的方法。
它基于拉格朗日原理,通过最小化系统的运动方程,求解系统中的广义坐标和约束力。
在机器人动力学中,拉格朗日动力学方法被广泛应用于建模和控制。
四足机器人动力学建模步态与坐标系在进行四足机器人动力学建模之前,首先需要确定机器人的步态和坐标系。
通常,四足机器人的步态可以分为步行和跑步两种模式。
对于步行模式,机器人的步态可以简化为前后左右四个联系稳定的点。
在这种情况下,机器人的坐标系可以选择为正前方为x轴正方向,右侧为y轴正方向,地面为z轴正方向。
运动学分析在进行动力学建模之前,需要进行机器人的运动学分析。
运动学分析可以得到机器人各个关节的位置、速度和加速度信息。
这些信息对于后续的动力学建模非常重要。
动力学建模操作要素在进行动力学建模之前,需要确定机器人系统的操作要素。
这些要素包括机器人的质量、惯性、关节约束等。
通过对这些要素的分析和建模,可以得到机器人的整体动力学方程。
拉格朗日方程拉格朗日动力学方法使用拉格朗日方程来描述系统的运动方程。
拉格朗日方程可以通过系统的动能和势能表达式得到。
对于四足机器人,为了简化模型,通常可以假设机器人为刚体,并且忽略其柔软特性。
拉格朗日方程的形式如下:L = T - V其中,L为拉格朗日函数,T为系统的动能,V为系统的势能。
动力学模拟通过对拉格朗日方程进行求解,可以得到系统的运动方程。
为了模拟机器人的动力学行为,可以使用数值方法进行迭代求解。
常见的数值方法有欧拉法和中点法等。
结论通过拉格朗日动力学方法进行建模,可以得到四足机器人的运动方程和动力学模拟。
玩转乐高科技系列24——画图机、跳跳蛙、四足步行机玩转乐高科技系列24——画图机、跳跳蛙、四足步行机乐高· 画图机万花尺万花尺的搭建方法很多,但是主要结构都差不多,基本上都是连杆结构加齿轮减速。
先看看万花尺的视频吧!视频看完了再看看作品的定妆图吧!先看一下作品的整体效果把纸放上去,开始画图纸片下面的托盘皮带传动结构部分细节图、蜗轮蜗杆传动部分结构图连杆结构下面的齿轮传动部分连杆结构细节图。
画笔的安装方法,用皮筋固定连杆两边做成了活动的结构,方便调整单位,画出不同的图案。
画图机的底盘搭建方法安装上托盘的整体效果用轴固定成活动的结构,方便调整单位画图案开始画图啦,画图的整体效果图一笔一画、画出最美的图案♢乐高· 四足步行机不一样的四足动物最近做了很多四足或者两足类型的作品,这次又来发表一个不一样的四足动物,四足动物都需要有连杆结构和减速系统。
先看看这个四足步行机的视频吧!四足步行机的定妆图:先看一看这个四足步行机的整体不同角度的效果图,发现个问题,视频里面的武器怎么不见了陈效果能够清晰的看清楚齿轮传动关系再看看侧后方的细节图这个角度看完,你基本上就可以搭建出来了。
中间是一个蜗轮结构好啦,乐高步行机的武器回来啦!你还可以给他装上各种不同的武器看一看齿轮里面的细节部分蜗轮蜗杆是这样组合出来的把齿轮拆掉之后,再看里面的结构更加清晰四足步行机就的细节图就分享到这里啦!我们接着看下一个作品,一个减压神器。
尤其是一群人的时候更加好玩♢♢乐高· 跳跳蛙减压神器每天都在认真的工作,是时候放松一下了,这个时候就让我们用乐高做一个减压神器吧!会是一个什么东西呢?先看看视频:是不是感觉很容易把这个小青蛙拍到杆子的顶端啊!快做一个自己来拍拍。
作品定妆图:这个跳跳蛙的杆子的高度,你可以自己随意发挥,想搭建多高就多高。
青蛙在杆子上面的效果把青蛙拿出来的效果图底座细节放大图,就是这个状态的时候,用力把青蛙拍起来好啦!青蛙不见啦!去到那里了一下就到达了杆子的顶部,是不是很厉害把青蛙拿掉看看这个顶部如何搭建的青蛙细节图,比较简单,可玩性比较高,不管是大人还是小孩都很喜欢这个作品换一个角度看看青蛙,猜猜zfeng老师下一期会给大家分享什么好东西呢♢。
简单的四足行走机器人简介:我当初的设计目标是在十分钟之内就可以制作出的四足行走机器人。
而最终我在这个机器人上花费了几乎三个小时,可以说我的最初目标并没有达成,不过我想如果我再次动手制作一个相同的机器人的话,我是可以在十分钟内搞定的。
第一步:零件清单你需要:两个伺服电机一个电话听筒能装四节AA电池的电池盒一个双刀双掷开关两张废CD光盘两个15cm长的螺栓两个13cm长螺栓一些其他小的螺栓螺帽一些扎带第二步:拆开听筒拆掉电话听筒两端的封盖,拆除里面的麦克风与听筒。
第三步:钻孔按照图中所示在电话听筒的两端各钻四个孔。
四个孔的位置应正好在一个正方形的四个角上。
第四步:第一个电机先从听筒较高的那一侧开始,先把伺服电机的线穿过整个听筒,从较低的那一端引出。
线穿好后将电机塞入听筒,伺服电机的十字臂应如图所示固定在听筒的内侧。
第五步:第二个电机将第二个电机同样塞入听筒的另一端,同样保证电机的十字架指向听筒的内侧,将两个电机的四条连接线全部从听筒的一端引出备用。
安装好后用扎带将两个伺服电机固定好,最后将扎带的多余部分剪掉。
第六步开关如图所示将双刀双掷开关固定在听筒上,利用听筒上的凸缘和扎带来固定开关。
第七步模板在电脑上设计好轮子的大小,固定孔的位置,然后将设计图纸打印出来,用剪刀剪下。
第八步:处理CD将打印出来的模板贴在废旧CD上。
先钻出两个最大的孔,然后再钻出中间的四个小孔。
另外一张CD上需要一个外围的缺口,使用剪刀小心的一点点沿着模板上的线剪出这个缺口。
第九步电池盒在听筒的中部钻出两个合适的孔,使用两组螺栓螺帽将电池盒固定在听筒上。
第十步连线将电池盒上引出的两根电源线(一红一黑)焊接到双刀双掷开关的中间两个引出端。
将两根短线(一红一黑)以X交叉的形式连接双刀双掷开关对角的两个引出端。
将电机1的红线与电机2的黑线连接在一起,电机1的黑线与电机2的红线连接在一起。
最后,将两对线焊接在双刀双掷开关底部的两个引出端上。
四足太阳能机器人diy图解
看到最近机器人挺热门的,小螃蟹也自己动手做了一个,做的不好地方望大家多多指教哈。
端午节快乐。
哇哈哈。
第1步:
毕业季开始,越来越多的学生都宅在家里,没啥事儿,趁着太阳正好,不如来一场说走就走的旅行?说错了,不好意思,不如做一个太阳能机器人?
暑期带着小侄子小外甥女去参加暑期竞赛,别提多拉风啦。
这是我们做好的
四足太阳能机器人,这两天是阴天,我还没有机会拿到太阳底下去试行,不
知道效果如何,不过用电池试了一下,走的不错哦。
第2步:
展示下我用到的材料吧,1个减速箱,3块经过激光切割过的亚克力板,
长孔塑料条有4根的,偷懒没有拍。
这个可以掰断的,还有2根u型塑料条,也可以掰断,一块太阳能电池板,螺丝螺母若干,外加两个摇臂。
主要用到
的工具就是螺丝刀。
一种四足行走机器人结构设计设计一个四足行走机器人需要考虑多个因素,包括机器人的稳定性、动力学、运动控制以及结构设计等。
下面将以一种设计为例介绍四足行走机器人的结构设计。
首先,机器人的稳定性是设计的关键因素之一、为了确保机器人在行走过程中的稳定性,需要将机器人的质心保持在稳定的位置上。
为此,可以采用中央控制单元控制四个腿同时行走,使机器人保持平衡。
另外,还可以在机器人底部安装一些陀螺仪、加速度计等传感器,用来检测机器人的姿态和运动。
通过这些传感器的数据,机器人可以根据需要做出相应的姿态调整和运动控制。
其次,动力学是机器人设计的一个重要方面。
机器人的每个腿都需要有适当的驱动力来推动机器人前进。
常见的驱动方式包括电机、液压或气压驱动。
电机驱动是最常用的一种方式,可以通过控制电流大小和方向实现机器人的运动。
液压和气压驱动可以实现更大的推力,但其结构和控制相对复杂一些。
其次,运动控制是四足行走机器人设计的关键。
在运动控制方面,可以根据需要选择合适的算法来实现机器人的平稳行走。
常见的算法包括离散步态、追踪器、力/位置控制等。
离散步态算法是最常用的算法之一,通过预先定义一系列步骤来控制机器人的运动,从而实现平稳的行走。
追踪器算法通过追踪目标轨迹来控制机器人的运动,可以实现更精确的控制。
力/位置控制算法结合了力和位置控制,使机器人可以根据需要调整其运动和姿态。
最后,结构设计是四足行走机器人设计中的一个重要环节。
机器人的整体结构应该具备足够的稳定性和刚度,以确保机器人在行走过程中不会出现过大的振动。
机器人的腿部结构应该能够实现平稳的行走,并能够承受足够的负载。
腿部可以采用多节链杆结构,以提供足够的自由度和运动范围。
另外,机器人的身体部分应该具备足够的强度和刚度,以支撑机器人的重量和负载。
总之,设计一个四足行走机器人需要考虑机器人的稳定性、动力学、运动控制和结构设计等多个方面。
通过合理的结构设计和运动控制算法,可以实现机器人的平稳行走和运动控制。
机器狗——四腿机器人的制作
佚名
【期刊名称】《发明与创新(中学时代)》
【年(卷),期】2016(000)004
【摘要】相对于六条腿的机器人,四条腿机器人制作的难度要大一些。
因为机器人同时提起两条腿的过程中,只剩下另外两条腿着地,往往导致机器人身体失衡。
机器狗是一种典型的四腿机器人,它的制作关键在机器人的腿形,图1是机器人四条腿的结构及运动示意图。
【总页数】1页(P37)
【正文语种】中文
【相关文献】
1.四腿液压弹跳机器人的单腿起跳优化设计
2.实用机器人制作讲座(四)金属材料加工及金属机器人的制作
3.仿生腿足式机器人的发展——浙江大学控制学院机器人实验室熊蓉教授谈国内外腿足式机器人研究情况
4.云深处科技:打造智能四足机器人"绝影"机器狗已在多行业示范应用
5.四足机器人单腿系统及其跳跃柔顺控制的研究
因版权原因,仅展示原文概要,查看原文内容请购买。
手把手教你做四足步行机器人用两个飞机模型舵机就能DIY个四足机器人!简单易做.你可试试.来源:机器人天空原创时间:2008-05-19第一步:准备零件和所需的材料制作一个四腿的行走机器人非常简单,所需零件也非常少,两个电机,机器人的腿(用直径合适的铁丝弯制),电池,底板(我用的是一种非常酷的塑胶材料,当它被在热水中加热时就会变软,冷却后又会回复硬度),用来将电池和电机固定在底板上的螺钉,一小块电路实验版(可以在电子市场买到),一个用来安放 ATMega的28针芯片插座,胶,烙铁和焊锡,以及刀子。
装配之前我还画了一张草图,在上面标出了需要打孔和切割的位置,有一张草图可以让你少走很多弯路,所以我建议大家在对手之前都要做一番“纸上谈兵”的工作。
第二步:现在需要用刀子在机器人的底板上划出两个安放电机的洞,我先按照草图划出一个洞后用切下来的那部分做标尺直接在另一边划另外一个洞。
切的时候不要忘了在下面垫一块纸板,我差一点切了我的咖啡桌。
打好两个洞后试一试电机,我划的洞似乎稍微宽了一点,长度倒是刚好。
第三步:弯曲底板,安装电机很不幸,本人手劲不足,无法直接把底板弯曲成照片中的角度,只好采用技术含量比较高的办法:首先烧一壶开水然后将底板放入水中一到二分钟,主要要用一个东西按住底板,免得它浮上来(不要用手!)。
拿出来后底板应该软一些了,戴着手套将它弯曲到自己想要的角度直到冷却。
根据网上高手的建议,最佳角度为30度。
钻上两个螺纹孔,然后用螺钉将电机固定在底板上。
第四步:固定腿部到伺服电机的十字臂我用尖嘴钳截了两段粗铜线作为机器人的前腿和后腿,然后把它们弯曲成适合伺服电机的十字臂的形状。
一条经典的BEAM准则就是需要连接零件时,如果可能的话尽量采用铁丝来捆绑。
用铁丝捆绑要优于采用焊锡连接。
用铁丝捆绑的话会给零件一定的自由空间,并且也利于零部件的再次使用。
第五步:关键的一步:将固定好腿部零件的十字臂装在伺服电机上将绑上了腿部的十字臂固定到伺服电机上,然后用钳子小心地把机器人的前后腿一点点折到图中所示位置。
这是一个非常精巧的活,一不小心甚至可能弄坏你的伺服电机,而且要保证前后腿左右基本对称,否则机器人很难走的很好。
我当初可是花费了好大力气才把它弯成我想要的形状,这里我得对你说一句:“Good Luck!”第六步:大脑因为这个电路非常简单,所以我就没有给出详细的电路图因为使用的是伺服电机,并且只是做很简单的运动,所以不需要额外的驱动电路,直接用单片机输出的脉宽调制信号来控制电机动作。
我切了一小块电子实验中常用的实验板来做这个电路,用胶水粘了一些插针在上面。
两个三针的用来连接伺服电机,一个两针的用来接电池,一个五针的用来传输程序到单片机里,还有一个28针的插座用来安放我的ATMega 8单片机。
所有的插针粘好后,我在实验板的反面用电线按照电路原理图将必要的针脚焊接在一起。
第七步编程将程序下载到单片机中有很多办法,我用的是最简单的一种方法,只需要一根如图中所示的下载线通过计算机并口将程序下载到单片机中。
使用这种方法有一个地方要切记:千万不要通过数据线对你的并行口施加5v以上的电压,那会烧坏你的并口,甚至毁掉你的整台电脑。
不过在这个工程中最高电压也只有3.6v,不过还是小心一点好。
我的代码在后面的附件中,程序功能很简单,只是靠输出脉冲信号来控制伺服电机的动作,与其他复杂的机器人相比算是很简单的了。
第八步:蹒跚学步现在所有的工作都已经做好了,我的机器人马上就要迈出它人生的第一步了,不过这时候可不能对它报太大的期望,毕竟就是一个婴儿迈出第一步的时候也是摇摇晃晃的。
这时候就需要不断的调整机器人的步伐,调整前腿的后腿的相对运动关系,当然这是一个枯燥而漫长(光荣而艰巨?)的过程。
经过多次的调整,我的机器人可以走的有点模样了。
现在,我可以骄傲的宣布:我的BEAM机器人做好了,有志者事竟成!第九步现在我的机器人可以可以像一个刚刚学会走路的小孩子一样,可以开始到处乱跑了。
不过这显然是不够的,还要多多实验机器人的步伐和机器人腿部的形状对机器人的行走速度和越障能力有什么影响。
对于越障,机器人腿部与脚部的弯曲角度是关键的。
经过试验我决定让机器人的腿部末端与地面成30度角。
那么现在我的机器人可以越过多高的障碍呢?第十步爬高图中显示的高度有一英寸左右,已经超出了很多轮式机器人的越障极限了。
我的机器人并没有一次就翻越成功,它也是尝试了两次才把两条前腿都放到书上去,不过最后还是成功的翻越了这个一英寸的障碍。
视频下载:/down/videos/2008-05-08/1210220968154.html第六步:大脑因为这个电路非常简单,所以我就没有给出详细的电路图因为使用的是伺服电机,并且只是做很简单的运动,所以不需要额外的驱动电路,直接用单片机输出的脉宽调制信号来控制电机动作。
我切了一小块电子实验中常用的实验板来做这个电路,用胶水粘了一些插针在上面。
两个三针的用来连接伺服电机,一个两针的用来接电池,一个五针的用来传输程序到单片机里,还有一个28针的插座用来安放我的ATMega 8单片机。
所有的插针粘好后,我在实验板的反面用电线按照电路原理图将必要的针脚焊接在一起。
第七步编程将程序下载到单片机中有很多办法,我用的是最简单的一种方法,只需要一根如图中所示的下载线通过计算机并口将程序下载到单片机中。
使用这种方法有一个地方要切记:千万不要通过数据线对你的并行口施加5v以上的电压,那会烧坏你的并口,甚至毁掉你的整台电脑。
不过在这个工程中最高电压也只有3.6v,不过还是小心一点好。
我的代码在后面的附件中,程序功能很简单,只是靠输出脉冲信号来控制伺服电机的动作,与其他复杂的机器人相比算是很简单的了。
第八步:蹒跚学步现在所有的工作都已经做好了,我的机器人马上就要迈出它人生的第一步了,不过这时候可不能对它报太大的期望,毕竟就是一个婴儿迈出第一步的时候也是摇摇晃晃的。
这时候就需要不断的调整机器人的步伐,调整前腿的后腿的相对运动关系,当然这是一个枯燥而漫长(光荣而艰巨?)的过程。
经过多次的调整,我的机器人可以走的有点模样了。
现在,我可以骄傲的宣布:我的BEAM机器人做好了,有志者事竟成!第九步现在我的机器人可以可以像一个刚刚学会走路的小孩子一样,可以开始到处乱跑了。
不过这显然是不够的,还要多多实验机器人的步伐和机器人腿部的形状对机器人的行走速度和越障能力有什么影响。
对于越障,机器人腿部与脚部的弯曲角度是关键的。
经过试验我决定让机器人的腿部末端与地面成30度角。
那么现在我的机器人可以越过多高的障碍呢?第十步爬高图中显示的高度有一英寸左右,已经超出了很多轮式机器人的越障极限了。
我的机器人并没有一次就翻越成功,它也是尝试了两次才把两条前腿都放到书上去,不过最后还是成功的翻越了这个一英寸的障碍。
一篇来自国外的点子DIY作品,一名电子学高手制作的磁悬浮玩具,简单翻译了一下,有具体制作的教学步骤,看了教程以后你应该也可以轻松DIY一个漂浮在空中的小作品了!这个装置结合了永磁铁和电磁铁,利用一个微控制器和一个IR感应器,当内部装有磁铁的小物体放在电磁铁的下方,IR感应器就会感应到物体的存在,微控制器就会启动电磁铁并调整磁力大小,当小物体受到向上的磁力和向下的重力相同时,它就会漂浮在空中,漂浮的位置和高度取决于重量和磁力大小。
就像在商店里卖的漂浮地球仪一样,它可以让带有磁铁的物体浮在空中,只不过这个装置结合了永磁铁和电磁铁,利用一个微控制器和一个IR感应器,当内部装有磁铁的小物体放在电磁铁的下方,IR感应器就会感应到物体的存在,微控制器就会启动电磁铁并调整磁力大小,当小物体受到向上的磁力和向下的重力相同时,它就会漂浮在空中,漂浮的位置和高度取决于重量和磁力大小。
下面的图片和文字是一名电子学高手教大家如何轻松DIY一个漂浮在空中的小玩具。
工作原理图如下:一、材料准备所需材料如下:- ATMega168 Microcontroller- 1 16-20 MHz Crystal- 28 Pin Socket- Dual Full H Bridge IC- 1 Power NPN- 2 Electromagnets- 1 Bicolour LED- 2 IR LED- 1 IR Photodiode- 1 5V Regulator- 2 Leveling Capacitors- 1 SPST Switch- 1 NO Button- 1, 470 Ohm Resistor- 1, 5 Ohm Resistor- 1 Universal Breadboard- 2 Cases- Plexiglas- Solder- Hot Glue- Steel Wire- Vinyl Tubing- 3 or more 1/4" diameter x 1/4" thick rare earth magnets (for the base)- 2 or more 1/2" diameter x 1/8" thick rare earth magnets (for the objects)所需工具:- Soldering Iron- Hot Glue Gun- Desoldering Pump- 3rd Hand- Plexiglas cutter二、底座的准备使用收音机的发射盒作为底座,装戒指的盒子用来装点磁铁和感应器。
首先在每个盒子的表面分别钻洞,用来穿过电线,安装电源钮、设置高度钮,安装LED指示灯。
连接两个盒子的是一根铁丝,使用胶把两个盒子分别固定在铁丝两端。
三、安装电磁铁和感应器将电磁铁的线圈连接电源供给线,并安装到戒指盒子中,注意确保每根电源线的安装正确,以确保线圈通电后能够产生磁力。
安装完成后,在线圈中央加入永磁铁。
这个是感应器,将它粘在一块透明的有机玻璃上,然后连接电源线,同样保证每根电源线的安装正确。
四、底座各电子元件的安装组成这部主要是进行底座上各控制元件的安装,包括微控制器、电源供给、LED指示灯等部分的安装。
具备电子学专业知识的朋友可以通过下面原文了解详细信息:For this step you probably should assemble the electronics on a solderless breadboard before soldering them together. The schematic to build the circuit is attached along with the hex file to load on the microcontroller. The Arduino - 0007 code file is in the introduction so you can tweak it or make changes as you need.It is very important to plan where all of the parts go, so all of the electronics will fit in the box the first time, If not it could be very frustrating and cause much grief.It is also important to note that the NPN power transistor(s) will heat up, to overcome this I mounted them to contact the aluminum base of my project box, This way it acts as a heat sink, preventing a spectacular fire. You will also need to come up with something similar to removemost of the heat from the box.Once the electronics are built, there is a section of code in the program to uncomment and and then load onto the chip to test the orientation of the coils. It pulses the coils off, pulling up, and pushing down, also indicated by the LED.本文来自:生活DIY-肉丁网地址:/life-DIY/dianzidianqi/DIY-cixuanfuwanjudezuofa -tujie.htm If you hold a magnet under the electromagnets and it doesn't follow the pattern, reverse the wires.五、选择漂浮物体根据可产生磁力的大小范围以及物体的重量、物体内磁铁的强度,摸索出合适的物体形状和大小,然后做出合适的漂浮物。