模板匹配金字塔
- 格式:docx
- 大小:52.83 KB
- 文档页数:3

模板匹配典型算法原理01 模板w开始位置在图像f的左上角当w的中心位于f的边界上时,围绕f的边界需要进行填充。
填充通常被限制为模板宽度的一半。
02 模板从左上角向右下角开始移动每次移动一个像素的位置,过程中可以得到模板和图像各位置间的相似度。
03 生成结果图像相似度量值保存到结果图像中. 在结果图像中的每个位置都包含匹配度量值。
04 找到匹配位置根据所用的匹配算法不同,对结果图像进行处理分析,找到匹配位置。
基于灰度值的模板匹配算法。
基于边缘的模板匹配算法基于形状的模板匹配算法Gray-Value-Based Template Matching基于灰度值的模板匹配基于灰度值的模板匹配—基本概念相似度量相似度量S是一个函数,函数中的参数包括:①模板中各点的灰度值t(r,c);②模板感兴趣区域移动到图像当前位置时感兴趣区域中的灰度值f(r+u,c+v);然后基于这些灰度值计算一个标量值作为相似度量。
01 S A D :计算模板与图像之间差值的绝对值总和02S S D :计算模板和图像之间差值的平方和问题●在光照保持不变的情况下,SAD 和SSD 相似度量的结果非常好。
●当光照发生变化,甚至在图像中存在相同物体的情况下,他们都将返回非常大的结果!基于灰度值的模板匹配——相似度量方法—SAD,SSD (Sum of absolute/squared difference )?03N C C :归一化互相关系数基于灰度值的模板匹配——相似度量方法—NCC (Normalized cross--correlation)(,)(,)(,)(,)u v Tc r c t u v f r u c v ∈=++∑结果•基于灰度值的模板匹配方法原理简单。
•在良好的光照条件下可以得到很满意的匹配结果。
Advantages优点 Disadvantages缺点 •受光照影响大,抗干扰性不强。
•图像存在遮挡、部分隐藏、信息缺失、混乱时 不能正确找到目标物体。
ncc模板匹配算法金字塔-回复什么是NCC模板匹配算法?NCC模板匹配算法(Normalized Cross-Correlation Template Matching Algorithm)是一种基于图像处理的计算机视觉技术,常用于模板匹配、目标检测和跟踪等应用。
该算法通过比较图像中的局部区域与模板的相似程度来寻找目标物体的位置。
NCC模板匹配算法的原理是利用图像的亮度信息进行图像匹配。
首先,通过归一化处理将图像的亮度范围缩放到0到1之间,以消除亮度差异的影响。
然后,将模板和图像中的子区域进行相互比较,计算它们之间的相关性得分。
具体来说,NCC模板匹配算法可以分为以下几个步骤:1. 构建金字塔:首先,将原始图像分解成不同分辨率的图像金字塔。
金字塔的底层包含原始图像,而顶层包含最小分辨率的图像。
通过构建金字塔,可以在不同尺度上对图像进行匹配,以适应目标物体的尺寸变化。
2. 提取模板:选择一个目标物体的样本图像作为模板,并对其进行预处理。
预处理步骤可能包括图像平滑、降噪、增强对比度等操作,以提取出模板的主要特征。
3. 计算相关性得分:对于金字塔中的每个尺度,将模板与图像的子区域进行比较,并计算它们之间的相关性得分。
相关性得分可以通过计算两者之间的互相关系数来得到。
互相关系数的数值介于-1和1之间,表示两者之间的相关程度。
相关性得分越高,表示两者之间的相似度越高。
4. 确定最佳匹配:在每个尺度上,找到相关性得分最高的位置,即表示最佳匹配的位置。
可以使用阈值或其他筛选方法来确定匹配的位置是否符合要求。
5. 后处理:对于得到的最佳匹配位置,可以进行一些后处理操作,如消除重叠匹配、根据周围像素进行插值或平滑等,以提高匹配结果的准确性和稳定性。
NCC模板匹配算法的优点是具有较高的匹配精度和较好的鲁棒性,适用于多种目标物体的检测与定位。
然而,该算法也存在一些限制,比如对图像的亮度变化敏感,对尺度变化较大的目标物体匹配效果不佳。
在HALCON中,模板匹配是一种常见的方法,用于在一幅图像中查找与给定模板最匹配的区域。
这种方法可以用于目标检测、图像分割、模式识别等应用。
在HALCON中,模板匹配主要通过使用`find_template`函数来实现。
该函数用于在一幅图像中查找与给定模板最匹配的区域,并返回匹配区域的坐标、大小和旋转角度等参数。
在使用`find_template`函数进行模板匹配时,需要提供以下参数:
1. 输入图像:要进行匹配的图像。
2. 模板图像:用于匹配的模板图像。
3. 搜索区域:在输入图像中搜索模板的区域,通常可以指定一个矩形区域或者整个图像。
4. 匹配参数:用于控制匹配算法的参数,例如相似性度量、搜索策略等。
在HALCON中,还可以使用`create_template`函数来创建模板图像,以便后续使用。
该函数可以根据给定的图像和参数来生成模板,并返回模板的句柄。
此外,为了提高匹配的准确性和效率,还可以使用一些优化技术,
例如使用多级金字塔、使用滤波器进行预处理、使用约束条件等。
总之,HALCON中的模板匹配是一种强大的工具,可以用于各种图像处理任务。
通过正确地选择和使用匹配算法和参数,可以获得准确和高效的匹配结果。
很早就想总结一下前段时间学习HALCON的心得,但由于其他的事情总是抽不岀时间。
去年有过一段时间的集中学习,做了许多的练习和实验,并对基于HDevelop的形状匹配算法的参数优化进行了研究,写了一篇《基于HDevelop的形状匹配算法参数的优化研究》文章,总结了在形状匹配过程中哪些参数影响到模板的搜索和匹配,又如何来协调这些参数来加快匹配过程,提高匹配的精度,这篇paper放到了中国论文在线了,需要可以去下载。
德国MVTec公司开发的HALCON机器视觉开发软件,提供了许多的功能,在这里我主要学习和研究了其中的形状匹配的算法和流程。
HDevelop开发环境中提供的匹配的方法主要有三种,即Component-Based、Gray-Value-Based、Shape-Based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配。
这三种匹配的方法各具特点,分别适用于不同的图像特征,但都有创建模板和寻找模板的相同过程。
这三种方法里面,我主要就第三种-基于形状的匹配,做了许多的实验,因此也做了基于形状匹配的物体识别,基于形状匹配的视频对象分割和基于形状匹配的视频对象跟踪这些研究,从中取得较好的效果,简化了用其他工具,比如VC++来开发的过程。
在VC下往往针对不同的图像格式,就会弄的很头疼,更不用说编写图像特征提取、模板建立和搜寻模板的代码呢,我想其中间过程会很复杂,效果也不一定会显著。
下面我就具体地谈谈基于HALCON的形状匹配算法的研究和心得总结。
1. Shape-Based matchi ng 的基本流程HALCON提供的基于形状匹配的算法主要是针对感兴趣的小区域来建立模板,对整个图像建立模板也可以,但这样除非是对象在整个图像中所占比例很大,比如像视频会议中人体上半身这样的图像,我在后面的视频对象跟踪实验中就是针对整个图像的,这往往也是要牺牲匹配速度的,这个后面再讲。
基本流程是这样的,如下所示:⑴首先确定岀ROI的矩形区域,这里只需要确定矩形的左上点和右下点的坐标即可,gen_recta ngle1()这个函数就会帮助你生成一个矩形,利用area_ce nter()找到这个矩形的中心;⑵然后需要从图像中获取这个矩形区域的图像,reduce_domain()会得到这个ROI ;这之后就可以对这个矩形建立模板,而在建立模板之前,可以先对这个区域进行一些处理,方便以后的建模,比如阈值分割,数学形态学的一些处理等等;⑶ 接下来就可以利用create_shape_model()来创建模板了,这个函数有许多参数,其中金字塔的级数由Numlevels指定,值越大则找到物体的时间越少,AngleStart和AngleExtent决定可能的旋转范围,AngleStep指定角度范围搜索的步长;这里需要提醒的是,在任何情况下,模板应适合主内存,搜索时间会缩短。
opencv中多尺度多角度模板匹配原理模板匹配是计算机视觉中常用的技术,它通常用于在一副图像中寻找和识别出与给定模板相似的部分。
在opencv中,有多种模板匹配算法可供选择,其中多尺度多角度模板匹配是一种比较常用且效果较好的算法。
本文将对opencv中多尺度多角度模板匹配的原理进行详细介绍,了解该原理对于进一步掌握opencv模板匹配的应用具有重要意义。
一、多尺度多角度模板匹配的基本原理多尺度多角度模板匹配是一种基于特征点的匹配方法,在匹配过程中考虑了模板的尺度和角度信息。
在opencv中,多尺度多角度模板匹配通常使用SIFT(尺度不变特征变换)或SURF(加速稳健特征)等算法进行特征点提取和描述子生成,然后通过描述子的比较来实现模板匹配。
1. 特征点提取和描述子生成在多尺度多角度模板匹配中,首先需要对输入图像和模板图像进行特征点提取和描述子生成。
SIFT算法通过构建高斯金字塔和DoG(差分高斯)金字塔来检测图像中的关键点,并为每个关键点生成描述子;SURF算法则使用盒滤波和积分图像来快速计算图像的特征点和描述子。
这些特征点和描述子能够在一定程度上描述图像的局部特征,并且对尺度和角度具有不变性,因此适合用于多尺度多角度模板匹配。
2. 特征点匹配特征点匹配是多尺度多角度模板匹配的关键步骤,它通过比较特征点的描述子来找出图像中相似的局部特征。
opencv中通常使用FLANN (快速库近似最近邻)或暴力匹配器来实现特征点匹配,FLANN匹配器可以通过KD树或LSH(局部敏感哈希)等方法快速搜索最近邻,而暴力匹配器则通过逐个比较特征点描述子的方法进行匹配。
3. 模型验证与优化在特征点匹配得到初步结果后,通常需要进行模型验证与优化来剔除错误匹配和提高匹配精度。
opencv中提供了基于RANSAC(随机抽样一致)算法的模型验证方法,它可以通过随机从匹配点中抽取子集来估计模型参数,并通过最大化一致性测度来筛选出正确的匹配点。
ncc模板匹配算法金字塔-回复NCC模板匹配算法金字塔:从理论到实践引言:在计算机视觉领域中,模板匹配算法是一种常见而重要的图像处理方法。
它可以用于在一个图像中寻找到与给定模板最相似的区域,并进行识别、跟踪、检测等任务。
然而,由于图像中的物体可能存在尺度变化、旋转、光照变化等问题,传统的模板匹配算法往往会受到影响,导致匹配结果不准确。
为了解决这些问题,NCC(Normalized Cross-Correlation)模板匹配算法金字塔应运而生。
第一部分:NCC模板匹配算法的基本原理NCC模板匹配算法是基于互相关运算的。
在模板匹配过程中,首先需要获取到待匹配图像和模板图像。
然后,通过在待匹配图像上滑动模板,计算模板与图像之间的相似度。
1.1 归一化互相关运算归一化互相关运算是NCC模板匹配算法的关键。
它使得模板和图像之间的相似度可以在不同的尺度下进行比较。
1.2 互相关运算公式互相关运算可以通过模板和图像的像素值进行计算。
在NCC模板匹配算法中,互相关运算的公式如下所示:NCC(x, y) = 1/n * Σ[(T(i, j) - μ_T) * (I(x + i, y + j) - μ_I)]其中,T(i, j)表示模板图像中坐标为(i, j)的像素值,I(x, y)表示待匹配图像中坐标为(x, y)的像素值。
μ_T和μ_I分别表示模板图像和待匹配图像的均值。
1.3 归一化互相关运算归一化互相关运算通过计算互相关值之间的相似度,来确保模板匹配算法在不同的尺度下能够得到一致的结果。
具体公式为:NCC(x, y) = Σ[(T(i, j) - μ_T) * (I(x + i, y + j) - μ_I)] / [σ_T * σ_I]第二部分:金字塔的概念及其应用为了解决尺度变化的问题,NCC模板匹配算法引入了金字塔的概念。
金字塔是一种多尺度的图像表示方法,它通过对图像进行不同分辨率的缩放,使得算法能够在不同尺度下进行匹配。
机器视觉目标识别方法解析:Blob分析法、模板匹配法、深度学习法Blob分析法(BlobAnalysis)在计算机视觉中的Blob是指图像中的具有相似颜色、纹理等特征所组成的一块连通区域。
Blob分析(BlobAnalysis)是对图像中相同像素的连通域进行分析(该连通域称为Blob)。
其过程就是将图像进行二值化,分割得到前景和背景,然后进行连通区域检测,从而得到Blob块的过程。
简单来说,blob分析就是在一块“光滑”区域内,将出现“灰度突变”的小区域寻找出来。
举例来说,假如现在有一块刚生产出来的玻璃,表面非常光滑,平整。
如果这块玻璃上面没有瑕疵,那么,我们是检测不到“灰度突变”的;相反,如果在玻璃生产线上,由于种种原因,造成了玻璃上面有一个凸起的小泡、有一块黑斑、有一点裂缝,那么,我们就能在这块玻璃上面检测到纹理,经二值化(BinaryThresholding)处理后的图像中色斑可认为是blob。
而这些部分,就是生产过程中造成的瑕疵,这个过程,就是Blob分析。
Blob分析工具可以从背景中分离出目标,并可以计算出目标的数量、位置、形状、方向和大小,还可以提供相关斑点间的拓扑结构。
在处理过程中不是对单个像素逐一分析,而是对图像的行进行操作。
图像的每一行都用游程长度编码(RLE)来表示相邻的目标范围。
这种算法与基于像素的算法相比,大大提高了处理的速度。
针对二维目标图像和高对比度图像,适用于有无检测和缺陷检测这类目标识别应用。
常用于二维目标图像、高对比度图像、存在/缺席检测、数值范围和旋转不变性需求。
显然,纺织品的瑕疵检测,玻璃的瑕疵检测,机械零件表面缺陷检测,可乐瓶缺陷检测,药品胶囊缺陷检测等很多场合都会用到blob分析。
但另一方面,Blob分析并不适用于以下图像:1.低对比度图像; 2.必要的图像特征不能用2个灰度级描述; 3.按照模版检测(图形检测需求)。
总的来说,Blob 分析就是检测图像的斑点,适用于背景单一,前景缺陷不区分类别,识别精度要求不高的场景。
halcon模板匹配中金字塔级别参数的工作原理
Halcon模板匹配中金字塔级别参数的工作原理是通过构建图像金字塔来实现的。
图像金字塔是一种多尺度表示的方法,它通过对原始图像进行多次降采样得到一系列不同分辨率的图像。
在模板匹配中,金字塔级别参数用于指定模板匹配算法在不同金字塔级别上进行匹配的精度。
具体来说,金字塔级别参数决定了模板匹配算法在图像金字塔的哪一层进行匹配。
工作原理如下:
1. 首先,根据金字塔级别参数,构建图像金字塔。
图像金字塔的每一层都是通过对上一层图像进行降采样得到的,即将图像的分辨率降低一定倍数。
2. 然后,将待匹配的模板也进行相同的金字塔降采样操作,得到一系列不同分辨率的模板。
3. 接下来,从金字塔的顶层开始,将模板与金字塔中的每一层图像进行匹配。
匹配过程可以使用相关性或差异性度量来评估模板与图像的相似度。
4. 如果在当前金字塔层级上找到了匹配结果,可以根据需要进行进一步的精确匹配或者返回匹配结果。
5. 如果在当前金字塔层级上没有找到匹配结果,则继续在下一层金
字塔上进行匹配,直到达到金字塔的最底层。
通过使用金字塔级别参数,模板匹配算法可以在不同分辨率的图像上进行匹配,从而提高了匹配的鲁棒性和准确性。
较高的金字塔级别参数可以提供更高的匹配精度,但也会增加计算时间。
因此,在选择金字塔级别参数时需要权衡匹配精度和计算效率。
ncc模板匹配算法金字塔-回复NCC模板匹配算法金字塔:在计算机视觉中的应用【引言】计算机视觉是人工智能领域中重要的研究方向之一,旨在让计算机能够像人一样理解和处理图像或视频。
在计算机视觉中,模板匹配是一种常见的技术,用于检测目标物体在图像中的位置或进行物体的识别。
然而,传统的模板匹配算法在复杂场景下往往表现不佳,为了提高匹配的精度,在金字塔技术的基础上,研究者们引入了NCC(Normalized Cross Correlation)模板匹配算法。
【NCC模板匹配算法】NCC模板匹配算法中的NCC指的是归一化互相关,它是一种衡量两个信号之间相似度的方法。
在模板匹配中,NCC通过计算待匹配图像和模板图像之间的互相关系数来评估匹配程度。
具体来说,NCC模板匹配算法包括以下几个步骤:1. 图像金字塔的构建:首先,为了提高算法的鲁棒性和适应性,需要构建图像金字塔。
图像金字塔是一种多分辨率的图像表示方法,它通过将原始图像进行不同尺度的降采样或上采样来生成一系列图像。
金字塔的底层是原始图像,向上的每一层都是上一层的二次采样结果。
2. 模板图像的提取:从待匹配的图像中提取模板图像,模板图像是我们要在待匹配图像中寻找的目标。
3. 模板图像的金字塔匹配:将模板图像和待匹配图像的金字塔进行匹配,从底层开始,逐步向上匹配。
具体地,首先在最底层的金字塔中进行模板匹配,然后在上一层的金字塔中根据上一层的匹配结果进行进一步的匹配,直到达到金字塔的顶层。
4. NCC匹配度的计算:在每个金字塔层次上,通过计算模板图像和待匹配图像之间的NCC来评估匹配度。
计算NCC的过程包括对灰度值进行归一化,并计算归一化互相关系数。
5. 匹配结果的筛选:根据NCC的计算结果,将匹配的误差小于预设阈值的结果筛选出来,作为有效的匹配结果。
【金字塔技术在NCC模板匹配算法中的优势】NCC模板匹配算法结合了金字塔技术,具有以下优势:1. 高效的多尺度匹配:金字塔技术允许我们在不同尺度上进行匹配,从而能够有效地处理图像中的尺度变化。
OpenCV笔记(3)(Canny边缘检测、⾼斯⾦字塔、拉普拉斯⾦字塔、图像轮廓、模板匹配)⼀、Canny边缘检测Canny边缘检测是⼀系列⽅法综合的结果。
其中主要包含以下步骤:1.使⽤⾼斯滤波器,平滑图像,滤除噪声。
2.计算图像中每个像素点的梯度强度和⽅向。
3.应⽤⾮极⼤值抑制(NMS:Non-Maximum Suppression),以消除边缘检测带来的杂散相应。
4.应⽤双阈值(Double-Threshold)检测来确定真实和潜在的边缘。
5.通过抑制孤⽴的弱边缘最终完成边缘检测。
1.⾼斯滤波器平滑图像。
2.计算梯度和⽅向使⽤X和Y⽅向的Sobel算⼦来分别计算XY⽅向梯度:每个点的梯度强度有XY⽅向的梯度计算出来:计算每个点梯度的⽅向:3.使⽤NMS有两种⽅法,第⼀种⽅法(插值法,⽐较复杂):通过计算出的梯度⽅向,找到与周边临近点的边的交点,然后使⽤权重计算交点的值,假设g1和g2之间的交点(左上的⿊点)处于6/4的位置,那么他的值为M = g1*(1-0.6)+g2*(0.4)。
当算出左上的⿊点和右下的⿊点值后,⽤这两个点与C的值进⾏⽐较,如果都⼩于C,则C归为边界。
如果有⼀个⽐C⼤,则丢弃C,这就叫抑制。
第⼆种⽅法(指定8个⽅向,不⽤插值,简化版):4.双阈值检测在NMS的基础上,判断⼀个边界点的梯度强度: (1) 如果值⼤于maxVal,则处理为边界 (2) 如果值minVal<梯度值<maxVal,再检查是否挨着其他边界点,如果旁边没有边界点,则丢弃,如果连着确定的边界点,则也认为其为边界点。
(3) 梯度值<minVal,舍弃。
通过以上步骤,完成Canny边缘检测。
调⽤Canny API如下:# 使⽤Canny边界检测def use_canny(image):# 后⾯两个参数代表双阈值检测的minVal和maxValimg1 = cv.Canny(image, 50, 100)cv.imshow('img1', img1)# 这⾥使⽤更⼤的minVal和maxVal,细节边界变少了img2 = cv.Canny(image, 170, 250)cv.imshow('img2', img2)⼆、⾼斯⾦字塔图像⾦字塔:Image pyramid如图中所⽰,从0到3是⼀个下采样过程(指图⽚越来越⼩的⽅向),从3到0是⼀个上采样过程(将图⽚变⼤的过程),⼀次下采样加⼀次上采样不等于原图像,因为会损失⼀些细节信息。
ncc模板匹配算法金字塔一、概述ncc模板匹配算法是一种常用的图像匹配方法,它通过计算图像之间的相似度来找到匹配的区域。
金字塔算法是ncc算法的一种优化,可以提高匹配速度和准确性。
本文将详细介绍ncc模板匹配算法和金字塔算法的基本原理和实现过程。
二、基本原理1.ncc算法:ncc算法是一种基于像素灰度值的匹配算法,通过计算图像之间的相似度来找到匹配的区域。
它首先将源图像和模板图像进行归一化处理,得到一个相似度矩阵。
然后,通过比较相似度矩阵中的值,找到最佳匹配区域。
2.优化金字塔算法:金字塔算法是ncc算法的一种优化,它将图像分成若干个子图像,逐步降低图像分辨率,从而加快匹配速度。
在每一层上,使用ncc算法进行匹配,找到最佳匹配区域,然后再继续下一层的匹配。
通过这种方式,金字塔算法可以在较低的分辨率下找到较好的匹配结果。
三、实现过程1.准备阶段:首先,需要准备好源图像和模板图像,将它们转换为相同的大小和格式。
然后,将源图像分成若干个子图像,每一层子图像的分辨率逐渐降低。
2.归一化处理:对每一层子图像和模板图像进行归一化处理,得到相似度矩阵。
对于每个像素点(x,y),将它的灰度值与模板图像在该位置的灰度值进行比较,得到一个相似度值。
这个值将在相似度矩阵中表示为(x,y)位置的值。
3.匹配阶段:在每一层上,使用ncc算法比较相似度矩阵中的值,找到最佳匹配区域。
对于每一层子图像,选择相似度矩阵中最大的值对应的区域作为最佳匹配区域。
如果有多处匹配区域具有相同的最大值,则选择面积最大的区域作为最佳匹配区域。
4.输出结果:最后,将金字塔算法的输出结果进行合并,得到最终的匹配结果。
输出结果包括最佳匹配区域的坐标和相似度值等信息。
四、优缺点分析1.优点:(1)速度快:金字塔算法通过逐步降低图像分辨率,可以在较短的时间内完成匹配任务。
(2)准确性高:在每一层上使用ncc算法进行匹配,可以获得较高的匹配准确性。
(3)适用范围广:ncc算法和金字塔算法适用于各种类型的图像匹配任务。
水平金字塔匹配方法
具体来说,水平金字塔匹配方法包括以下几个步骤:
1. 构建金字塔,首先,对原始图像进行降采样得到一系列不同
尺度的图像,这些图像构成了金字塔的不同层级。
2. 初始匹配,从金字塔的最粗糙层级开始,在较低分辨率的图
像上进行初始匹配,得到一个大致的匹配结果。
3. 逐层细化,随后,逐层向上细化匹配结果,即在较高分辨率
的图像上对初始匹配结果进行优化,直到达到最高分辨率的图像。
4. 合并结果,最终将各层级得到的匹配结果进行合并,得到最
终的配准结果。
水平金字塔匹配方法的优点在于能够在不同尺度下进行匹配,
从而提高了匹配的鲁棒性和准确性。
此外,通过金字塔结构的逐层
优化,还能够加快匹配速度。
然而,该方法也存在一些缺点,例如
需要额外的计算开销和内存消耗,以及对初始匹配参数的敏感性等。
总的来说,水平金字塔匹配方法是一种有效的图像配准方法,适用于许多计算机视觉任务,如图像拼接、目标跟踪等。
通过在不同尺度下对图像进行匹配,可以得到更加鲁棒和准确的配准结果,从而提高了图像处理和计算机视觉任务的性能和效果。
ncc模板匹配算法金字塔-回复标题:NCC模板匹配算法金字塔:逐层逼近准确匹配引言:在计算机视觉领域,模板匹配是一种常用的方法,可以用来在图像中查找指定的模式或物体。
然而,由于图像具有不同的尺度和光照条件可能发生变化,传统的模板匹配方法可能会遇到一些问题。
为了解决这一问题,NCC (Normalized Cross-Correlation)模板匹配算法应运而生。
本文将详细介绍NCC模板匹配算法,并重点探讨其金字塔策略的实现过程。
第一部分:NCC模板匹配算法概述在开始深入研究NCC模板匹配算法之前,我们先了解一下该算法的基本原理。
NCC算法通过计算模板与图像之间的归一化交叉相关性来判断模板在图像中的匹配程度。
该算法主要由以下步骤组成:1. 预处理:将模板和图像转换为灰度图像,并对其进行归一化处理。
2. 定义目标函数:通过计算模板与图像的归一化相关性,得到一个目标函数。
3. 寻找最大值:在目标函数中找到最大值,即为最佳匹配位置。
第二部分:NCC模板匹配算法的金字塔策略尽管NCC模板匹配算法能够实现准确匹配,但对于具有多种光照条件和多尺度的图像而言,单纯依赖一个尺度和一个模板可能无法满足准确匹配的要求。
为了解决这个问题,NCC模板匹配算法引入了金字塔策略。
1. 基本概念:金字塔策略是指在不同尺度上进行多次匹配。
通过对输入图像进行降采样得到多个尺度的图像,然后在每个尺度上进行模板匹配,最后把匹配结果进行整合。
2. 金字塔生成:为了得到多尺度的图像,在金字塔策略中需要进行图像的降采样操作。
常见的降采样方法有平均池化和最大池化。
通过不断降采样,生成多层的金字塔图像。
3. 匹配过程:在金字塔的每一层上进行模板匹配,可通过逐层逼近的方式找到最佳匹配位置。
首先,在最大尺度的图像上进行模板匹配,得到一个初始的匹配结果。
然后,将该匹配结果作为下一层金字塔图像的初始位置,在较小尺度上继续匹配,直到达到最小尺度。
4. 匹配结果整合:在每个金字塔层上得到的匹配结果,并不都是准确匹配的位置。
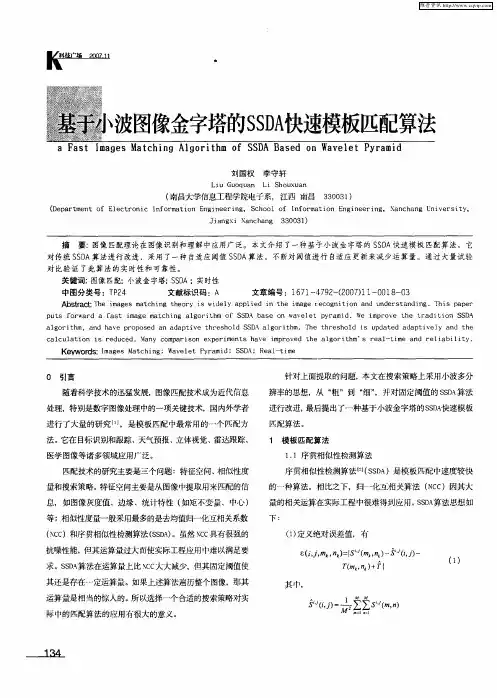
2020年第19期信息与电脑China Computer & Communication算法语言工件定位的快速自适应模板匹配研究蒲 云(重庆商务职业学院,重庆 401331)摘 要:传统机器人抓取采用示教方式,运行过程中可能出现较大的定位偏差,从而会影响工件装配。
针对该问题,给机器臂配置机器视觉模块,对传感器获取的图像使用快速自适应模板匹配处理,获得工件在图像中的位置,进而调整定位参数。
实验结果表明,该方法不仅可以获得准确的定位参数,而且计算速度快、适应性强。
关键词:模板匹配;金字塔;自适应边缘检测;工件定位中图分类号:TP391.41 文献标识码:A 文章编号:1003-9767(2020)19-037-03Research on Fast Adaptive Template Matching for Work PositioningPu Yun(Chongqing Business Vocational College, Chongqing 401331, China)Abstract: The traditional robot adopts teaching method, which may cause large positioning deviation in the process of operation. In order to solve this problem, the machine vision module is configured for the robot arm.The image acquired by the sensor is processed by fast adaptive template matching to obtain the position of the work in the image. The experimental results show that the method can not only obtain accurate positioning parameters, but also has fast calculation speed and strong adaptability.Key words: template matching; pyramid; adaptive edge detection; work positioning0 引言随着产业升级和智能制造的不断深化,装配车间对生产过程中的自动化水平、精度控制和降本增效的需求越来越高。
目录
1、Opencv模板匹配原理--没有金字塔 (2)
2、模板匹配—使用金字塔 (3)
1)主要函数简介 (3)
2)程序流程 (3)
3、验证和结果 (3)
1)实验环境 (3)
2)实验结果 (3)
Opencv模板匹配
1、Opencv模板匹配原理--没有金字塔
函数:cvMatchTemplate( Source, Target, result, method);
说明:
Source:源图像,一般我们使用灰度图像;
如果source为RGB图像,使用函数cvCvtColor(source,dst,CV_RGB2GRAY)
这里,dst为转换后的灰度图像。
Target:模板图像。
Result:匹配后的矩阵,width = S_width – T_taget + 1 ,height = S_height – T_height +1 使用函数IplImage* result = cvCreateImage( resultSize, IPL_DEPTH_32F, 1 )获得。
Method:
CV_TM_SQDIFF:
CV_TM_SQDIFF_NORMED
CV_TM_CCORR
CV_TM_CCORR_NORMED
CV_TM_CCOEFF
CV_TM_CCOEFF_NORMED
2
一般的,使用CV_TM_CCORR_NORMED,存在的问题是没有使用去均值,可能对亮度变化比较敏感。
程序流程:
读入模板和源图像→建立result图像→模板匹配→使用cvMinMaxLoc找到最大(最小)值→输出结果
2、模板匹配—使用金字塔
1)主要函数简介
cvPyrDown( src,dst,filter )
src:源图像,尺寸为width×height
dst:经过一次下采样得到的图像,尺寸为width/2 ×height/2
filter:卷积滤波器,目前仅支持CV_GAUSSIAN_5×5
cvSetImageROI( image,rect )
image:源图像,经过这个函数后,图像大小变为rect(长方形)
rect:(x,y,width,height)(x,y)为长方形的左上角坐标,width,height为长方形的宽和高。
2)程序流程
读入模板和源图像→cypyrdown(假设只有一次)得到源图像和模板下采样图像→设置这里的匹配result图像→模板匹配→使用cvMinMaxLoc找到最大值→以这个最大值为中心(x1,y1),将源图像裁剪为width = W_template +7 ,height = H_template+7图像,rect左上角坐标为X2=x1 - W_template/2 -3 Y2=y1 - H_template/2 -3→再次建立result1图像→模板匹配→使用cvMinMaxLoc找到最大值
3、验证和结果
1)实验环境
Core i5 2410M thinkpad x220主机
Ubuntu10.04 –gcc
源图像大小360×360,模板大小140×140
采用一级金字塔
验证方法:源图像S、模板T,分别采用加噪声和更改亮度
2
模板匹配程序耗时约10ms。
3。