利用SM502的ZVPort实现SAA7111视频采集
- 格式:pdf
- 大小:125.96 KB
- 文档页数:2

【机器视觉运动控制一体机小课堂】三分钟实现相机的相关采集操作导语:在机器视觉项目应用中图像采集是通过成像设备,也就是工业相机去获取实时的图像,这个部分就是构成信号分布信息的一个过程。
背景在机器视觉项目应用中图像采集是通过成像设备,也就是工业相机去获取实时的图像,这个部分就是构成信号分布信息的一个过程。
通俗一点讲就是将产品放在相机成像的视野范围内,通过相机获取产品的特征,比如产品的形状大小颜色位置等信息,将获取到的图像信息,输送给机器视觉运动控制一体机的过程。
在上期课程中,我们讲述了如何使用机器视觉运动控制一体机实现图像的几何变换的课程。
本期课程正运动小助手给大家分享一下机器视觉运动控制一体机使用相机进行相关采集操作的课程。
教学视频01VPLC控制器(一)VPLC516E构架图(二)课前准备1.电脑一台,安装ZDevelop3.10以上版本软件2.VPLC516E机器视觉运动控制一体机一台3.24V直流电源一个4.网线两根5.正运动自品牌相机一台 6.电线若干(三)相机连接机器视觉运动控制一体机前准备工作(四)相机网口IP设置操作说明 1.首先去PC上高级网络设置的更改适配器选项修改相机与电脑网口对应连接的网口IP,设置为192.168.1.10,之后再去添加巨型帧。
IP 设置打开巨型帧 2.接着去对应的相机品牌驱动软件上修改相机的IP地址在192.168.1.X网段下。
至此,相机的网口IP设置就完成了,设置完IP后再将相机连接到机器视觉运动控制一体机上的LAN2口即可正常采集图像。
(后续在不改动相机的IP情况下,无需重复操作)(五)控制器扫描相机注意事项1.检查相机类型是否为VPLC516E机器视觉运动控制一体机支持的相机类型。
2.检查相机网段是否和控制器处于同一网段(控制器和相机处于同一网段才能通信),并查看相机IP是否被占用,若被占用请先修改相机IP或机器视觉运动控制一体机IP并处于同一网段。

广州大学学生实验报告开课学院及实验室:物理与电子工程学院 2015年x月xx日班级光信121 姓名学号12193000 指导老师实验课程名称数字信号处理实验Ⅰ成绩实验项目名称视频图像的采集和显示一、实验目的二、实验原理三、使用仪器、材料四、实验步骤五、实验过程原始记录(数据、图案、计算等)六、实验结果及分析一.实验目的通过实验学习在CodeComposerStudio2.21 的环境下使用ICETEK-VC5509-A 板设计、调试程序的方法;学习用程序控制ICETEK-TVP5150-E 板采集视频图象。
二.实验原理1.ICETEK-TVP5150 板介绍,请参看《ICETEK-TVP5150-E 板使用说明书》。
2.用程序控制ICETEK-TVP5150-E 板所提供的控制寄存器,可以实现采集一场视频图象。
流程图见后面。
3.一场标准PAL 制视频图象的象素分辨率为720x288。
图象中每象素用8 位二进制数表示,取值1-254,表示不同的亮度信息。
4.图象保存在指针lpImage 开始的片外存储器中,由于普通5509 的c 语言数据指针无法超越64k 边界,所以程序中采用FARPTR 类型指针来读写图象。
图象的尺寸为722x288。
5.原始图象的缩略图存在数组y 中,尺寸为120x96。
三.实验设备计算机,ICETEK-VC5509-A-EDU 实验箱,ICETEK-TVP5150-E 板,标准PAL 制摄像头。
四.实验步骤1.实验准备:连接实验设备:请参看本书第三部分、第一章、二。
连接ICETEK-TVP5150-E 板:-ICETEK-VC5509-A 板正面朝上(DSP 芯片朝上),找到板上扩展接口 P3 和 P4。
-ICETEK-TVP5150-E 板正面朝上(所有集成电路芯片朝上),找到插头 DSP P4 和DSP P3。
-将 ICETEK-TVP5150-E 板上 DSP P4 对准 DSP 系统板上 P4、DSP P3 对准系统板上 P3 插入接口,注意不要插错位,所有插针均要插入插孔之中。

使用LabVIEW采集视频图像LabVIEW是一款功能强大的图形化编程软件,它被广泛应用于工程领域中进行数据采集、图像处理和控制系统设计等。
在LabVIEW中,可以利用相机模块进行视频图像的采集。
下面将介绍如何使用LabVIEW进行视频图像采集。
下面是一个基本的视频图像采集步骤:1. 打开相机:使用"IMAQdx Open Camera"函数打开相机设备,此函数需要指定相机设备名称或索引号。
2. 获取图像格式:使用"IMAQdx Enumerate Video Modes"函数获取相机支持的视频格式列表,并选择一个适合的格式。
3. 设置视频格式:使用"IMAQdx Set Video Mode"函数设置视频格式,将相机设为所需的分辨率、帧率和像素格式等。
4. 开始采集图像:使用"IMAQdx Start Acquisition"函数开始图像采集。
5. 获取图像:使用"IMAQdx Grab"函数获取图像数据。
6. 图像显示:可以使用"IMAQ Display Image"函数在LabVIEW界面上显示图像,或使用其他图像处理函数对图像进行进一步处理。
7. 结束采集:使用"IMAQdx Stop Acquisition"函数停止图像采集。
8. 关闭相机:使用"IMAQdx Close Camera"函数关闭相机设备。
此外,还可以通过使用循环结构,使图像采集和显示等操作连续进行,实时显示视频图像。
例如,可以使用While循环,将图像采集和显示的过程放在循环中,通过设置退出条件来控制图像采集的时机。
在LabVIEW界面中,可以修改相机采集参数,如分辨率、帧率等,也可以添加其他的图像处理算法来实现更丰富的功能,如边缘检测、目标追踪等。
综上所述,使用LabVIEW进行视频图像采集是一项相对简单且灵活的操作。
MV系列视频采集卡使用说明书第一章产品说明解霸卡MV2000S08V/MV2000S04V卡是专门针对系统开发商进行多路视频开发的PCI视频卡。
它具有低CPU占用率、多路实时显示等特点。
针对系统开发商,提供完整的二次开发包,通过该SDK,系统开发商可以使用VB,VC等编程软件进行系统设计,选择存储成为AVI或使用软件MPEG-4压缩引擎进行压缩,提供对图象的对比度色度亮度灰度进行调整,可以捕获图象通道中的动态图象存储成为JPG或者BMP静态图象。
同时它提供完整的系统监控程序。
它可以实现数字录像、网络传输、动态检测、云台控制、回放文件和系统管理等功能,且支持网页浏览。
它采用实时并行处理技术,真正实现了1-8路的实时压缩处理,最高可支持到一机24路显示与录像。
每路视频信号均采用MPEG4算法压缩,在标准CIF(320*240NTSC/352*288PAL)图像格式下。
每个通道均可独立操作互不干扰。
解霸卡MV系列采用用超强Philips 7130芯片。
Philips 7130芯片是一颗9bit ADC,相对于8bit ADC BT878芯片来说不管是图像质量还是颜色的饱和度方面都要强很多。
它独具的4线3D梳状滤波器能自动消除噪点使它的图像监视质量能比BT878提高35%左右。
解霸卡MV2000S08V解霸卡MV2000S04V第二章产品特性PNP支持,支持一机多卡,全实时录像最多支持16路,支持Windows 2000/XP,目前有一卡四路与一卡八路两种类型的卡,可混插,支持PAL/NTSC,各通道同时工作互不干扰。
支持Overlay多路同时预览,CPU占用率极低。
压缩格式:H.264压缩码率:20K-2Mbps,支持CBR.VBR码率控制方式压缩帧率:1-25帧/秒(PAL),1-30帧/秒(NTSC)压缩比:40-180M/C/H分辨率:704*576,352*288/176*144 (PAL)640*480,352*240/176*120 (NTSC)支持CIF Video MPEG 4 Encorder提供MPEG4压缩引擎,可对多路视频图像进行压缩。
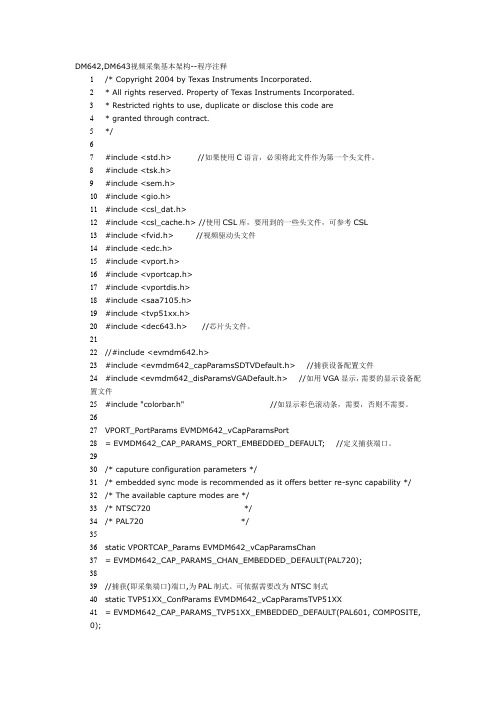
DM642,DM643视频采集基本架构--程序注释1/* Copyright 2004 by Texas Instruments Incorporated.2* All rights reserved. Property of Texas Instruments Incorporated.3* Restricted rights to use, duplicate or disclose this code are4* granted through contract.5*/67#include <std.h> //如果使用C语言,必须将此文件作为第一个头文件。
8#include <tsk.h>9#include <sem.h>10#include <gio.h>11#include <csl_dat.h>12#include <csl_cache.h> //使用CSL库,要用到的一些头文件,可参考CSL13#include <fvid.h> //视频驱动头文件14#include <edc.h>15#include <vport.h>16#include <vportcap.h>17#include <vportdis.h>18#include <saa7105.h>19#include <tvp51xx.h>20#include <dec643.h> //芯片头文件。
2122//#include <evmdm642.h>23#include <evmdm642_capParamsSDTVDefault.h> //捕获设备配置文件24#include <evmdm642_disParamsVGADefault.h> //如用VGA显示,需要的显示设备配置文件25#include "colorbar.h" //如显示彩色滚动条,需要,否则不需要。
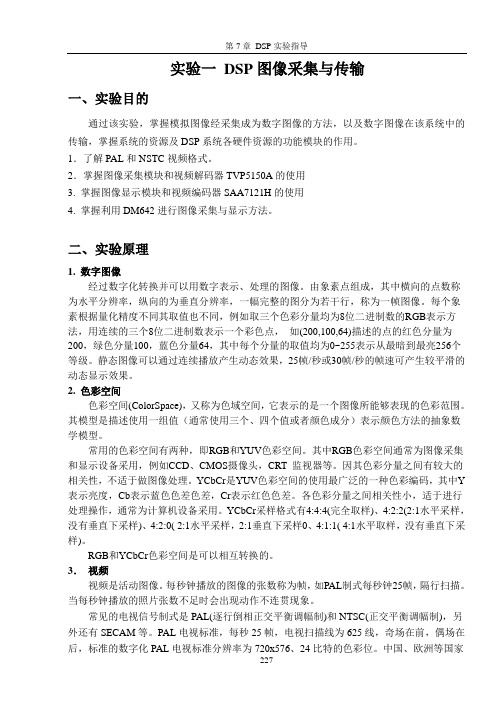
实验一DSP图像采集与传输一、实验目的通过该实验,掌握模拟图像经采集成为数字图像的方法,以及数字图像在该系统中的传输,掌握系统的资源及DSP系统各硬件资源的功能模块的作用。
1.了解PAL和NSTC视频格式。
2.掌握图像采集模块和视频解码器TVP5150A的使用3. 掌握图像显示模块和视频编码器SAA7121H的使用4. 掌握利用DM642进行图像采集与显示方法。
二、实验原理1. 数字图像经过数字化转换并可以用数字表示、处理的图像。
由象素点组成,其中横向的点数称为水平分辨率,纵向的为垂直分辨率,一幅完整的图分为若干行,称为一帧图像。
每个象素根据量化精度不同其取值也不同,例如取三个色彩分量均为8位二进制数的RGB表示方法,用连续的三个8位二进制数表示一个彩色点,如(200,100,64)描述的点的红色分量为200,绿色分量100,蓝色分量64,其中每个分量的取值均为0~255表示从最暗到最亮256个等级。
静态图像可以通过连续播放产生动态效果,25帧/秒或30帧/秒的帧速可产生较平滑的动态显示效果。
2. 色彩空间色彩空间(ColorSpace),又称为色域空间,它表示的是一个图像所能够表现的色彩范围。
其模型是描述使用一组值(通常使用三个、四个值或者颜色成分)表示颜色方法的抽象数学模型。
常用的色彩空间有两种,即RGB和YUV色彩空间。
其中RGB色彩空间通常为图像采集和显示设备采用,例如CCD、CMOS摄像头,CRT 监视器等。
因其色彩分量之间有较大的相关性,不适于做图像处理。
YCbCr是YUV色彩空间的使用最广泛的一种色彩编码,其中Y 表示亮度,Cb表示蓝色色差色差,Cr表示红色色差。
各色彩分量之间相关性小,适于进行处理操作,通常为计算机设备采用。
YCbCr采样格式有4:4:4(完全取样)、4:2:2(2:1水平采样,没有垂直下采样)、4:2:0( 2:1水平采样,2:1垂直下采样0、4:1:1( 4:1水平取样,没有垂直下采样)。
5.2 视频信息的采集与加工一、视频采集视频采集是指将实际场景中发生的动态图像、声音等信息,利用摄像机等设备转换为数字信号或模拟信号的过程。
在采集视频之前,需要确定采集对象、采集地点和采集时间等信息。
以下是视频采集的步骤:1. 硬件准备在进行视频采集前,需要准备相应的硬件设备,例如摄像机、扩音器、话筒等。
如果需要进行高清视频和高保真音频的采集,还需要选择专业的设备。
另外,还需要准备存储介质,对采集的视频和音频进行存储。
2. 视频设备参数设置在进行视频采集前,需要对摄像机的参数进行设置。
例如,选择适当的分辨率、帧率、曝光、白平衡等参数,确保采集的视频质量符合要求。
另外,还需要设置音频输入设备的采样率、采样深度等参数,以保证音频质量。
3. 采集视频与音频在确定好摄像机和音频设备参数后,可以进行视频和音频采集。
在采集过程中,需要注意以下几点:•稳定的拍摄角度。
保持摄像机的稳定,防止画面晃动和抖动。
•统一的光线环境。
保持采集环境的光线源稳定,以保证采集的视频质量。
•稳定的音量。
保持音频输入设备的稳定,防止语音太小或太大。
4. 视频后期处理采集完成后,需要进行视频后期处理,包括剪辑、调色、特效等操作。
剪辑是指将拍摄的素材进行片段式的处理,使其更符合要求的内容。
调色是指利用专业的软件进行颜色修正、色彩调整等工作。
特效则是对制作出的视频加入各种动态效果、文字、音效等,使其更具专业性。
二、视频加工视频加工是指对采集到的视频进行后期处理,使其符合特定需求的过程。
包括从采集到的视频中提取出需要的信息,例如图像、文字、音频等,并进行编辑、剪辑、制作等操作。
以下是视频加工的步骤:1. 视频编辑在视频编辑中,需要对采集到的素材进行切割、合并、移动等操作,以符合视频的节奏和节目的要求。
2. 视频剪辑采集到的视频往往存在一些不符合要求的镜头或素材,需要通过视频剪辑进行去除,这可以提高视频质量,并且让视频更加专业。
3. 视频效果添加视频编辑完成后,可以根据需要对视频进行效果添加,例如加入过渡、滤镜、动画等效果,以提高视频质量。