实验设计流程图
- 格式:docx
- 大小:10.98 KB
- 文档页数:1

实验报告课程名称__管理信息系统(本科)___ 实验名称__程序流程设计__院系会计学院_专业班级__指导教师学号_姓名__ ______实验日期_2014年6月6日_____实验成绩___________一、实验目的本实验要求用程序流程图、盒图表达程序流程。
二、实验内容(1)了解程序流程图、盒图。
(2)对问题进行算法设计。
(3)用程序流程图描述算法。
(4)用盒图描述算法。
三、实验过程及结果1、对于任意给出的3个实数,作为三个线段的长度值,判定这三线段能否构成三角形,若可以,则判断该三角形的类型(普通三角形、等边三角形、等腰三角形)。
(1)用文字描述算法。
(2)用程序流程图描述算法。
(3)用盒图描述算法。
(1)1.输入三角形三边a b c2.依次输入判定三角形类型的条件(1)三角形任意两边之和大于第三边(2)三角形是否有任意两条边相等且不等于第三边(3)三角形三边都相等(2)四、实验思考题1、设计该题算法时,主要碰到的问题有哪些?如何解决这些问题的?设计流程图的时候首先要把构成三角形条件以及等腰三角形等边三角形的判定条件罗列出来,整理清楚思路,想清楚步骤。
由于这些逻辑顺序和判定条件有些模糊和不清楚,所以不能顺利的进行文字的描述以及流程图的绘制。
我的解决办法是上网将判定条件找出来,从判定条件中选出自己需要的,现在草稿纸上绘制出流程图草图,最后才在机子上操作。
2、若三边可构成三角形,判断这个三角形的类型(普通三角形、等边三角形、等腰三角形、直角三角形、等腰直角三角形),该如何修改算法?需要加入几个判定条件,步骤如下:1.在构成三角形条件下加入构成直角三角形的条件:a^2+b^2=c^22.在直角三角形下加入等腰三角形判定条件:a=b下面是赠送的励志的100句经典话,需要的朋友可以学习下,不需要的朋友可以下载后编辑删除!!谢谢!!【励志的话】平凡却无私的人啊千万不要抱怨命运的不公。
也许,命运只是用另一种方式偏爱着你那是因为善良的她想让你尽快长大感知人间悲喜,聆听世间哀乐。
课程设计一、实验目的1.加深对课堂讲授内容的理解,掌握解决实际应用问题时所应具有的查阅资料、技术标准和规范,以及软件编程、调试等能力,掌握面向对象的编程思想及Java语言程序设计的规律与技巧,为进一步学习web应用开发及今后从事专业工作打下基础。
2. 使用本学期学习的Java SE技术(也可以使用课堂教学中没有学习过的Java技术,但是应当以Java SE技术为主)完成多功能日历GUI程序的设计,使之具有如下基本功能:一年日历用12页显示,每页显示一个月的日历。
日历可以按年或月前后翻动,能够显示当前的日期,可以为每页日历选择背景图片。
3.在完成基本功能的基础上发挥自己的想象力与创造力,使程序凸显出与众不同的特点与功能,形成本小组的特性色。
二、实验要求1.问题描述准确、规范。
2.程序结构合理,调试数据准确、有代表性.。
3.界面布局整齐,人机交互方便。
4.输出结果正确。
5.正确撰写实验报告。
三、实验内容编写一个GUI程序实现日历的功能。
一年日历用12页显示,每页显示一个月的日历。
日历可以按年或月前后翻动,能够显示当前的日期以及当前农历,可以为每页日历选择背景图片。
可以实现显示时钟,时钟能进行整点报时。
可以实现备忘记事功能,能在每天添加、修改、删除记事等操作。
四、实验步骤1.在上机实验前,小组成员进行选题讨论,确定小组感兴趣而又伸缩性强的题目多功能日历。
2.在第一次上机实验时讨论分工,分工明确之后,分头合作进行。
3.各成员完成自己的任务后,最后进行统筹合并,以及程序最后的优化。
4. 根据实验结果,写出合肥工业大学实验报告。
实验报告应当包括:实验内容,程序流程图,类结构,程序清单,运行结果,以及通过上机取得的经验。
5.详细的上机实验步骤见任务分工及程序设计进度表。
五、实验结果经过小组成员的共同努力,最终我们小组设计的多功能日历程序能够实现实验的基本要求——一年日历用12页显示,每页显示一个月的日历。
日历可以按年或月前后翻动,能够显示当前的日期,可以为每页日历选择背景图片。
《单片机技术》实验多媒体讲义《单片机技术》实验多媒体讲义《单片机技术》实验多媒体讲义三.程序清单及程序流程框图ORG 0000H Array LJMP MAINMAIN: MOV R0,#30HMOV R2,#10HCLR AA1: MOV @R0,AINC R0INC ADJNZ R2,A1MOV R0,#30HMOV R1,#40HMOV R2,#10HA2: MOV A, @R0MOV @R1,AINC R0INC R1DJNZ R2, A2MOV R1,#40HMOV DPTR ,#4800HMOV R2, #10HA3: MOV A,@R1MOVX @DPTR ,AINC R1INC DPTRDJNZ R2,A3MOV SP,#60HMOV R2,#10HMOV DPTR ,#4800HPUSH DPLPUSH DPHMOV DPTR,#5800HMOV R3,DPLMOV R4,DPHA4: POP DPHPOP DPLMOVX A,@DPTRINC DPTRPUSH DPLPUSH DPHMOV DPL,R3MOV DPH,R4 MOVX @DPTR,A INC DPTRMOV R3,DPLMOV R4,DPHDJNZ R2,A4MOV R0,#50HMOV DPTR,#5800H MOV R2,#10HA5: MOVX A,@DPTR MOV @R0,AINC R0 INC DPTR DJNZ R2,A5POP DPH POP DPL HERE: LJMP HEREEND《单片机技术》实验多媒体讲义《单片机技术》实验多媒体讲义《单片机技术》实验多媒体讲义三.实验电路四.程序清单及流程图程序一ORG 0000HLJMP MAIN ORG 000BH LJMP IPTO MAIN: MOV SP, #30H MOV TMOD, #01HCLR 00H SETB EA SETB ET0 MOV TH0, #3CH MOV TL0, #0B0H MOV R1, #14H SETB TR0 MOV A, #0feH MOV P1, A NT: JNB 00H, NT RL A MOV P1, ACLR 00H LJMP NT IPTO: MOV TH0,#3CH MOV TL0,#0B0HDJNZ R1, TIOMOV R1, #14HSETB 00HTIO: RETIEND程序二只需将程序一中“RL A”改为“RR A”即可实现其功能。
实验五四位移位乘法器一、实验目的1. 学会用层次化设计方法进行逻辑设计;2. 设计一个八位乘法器。
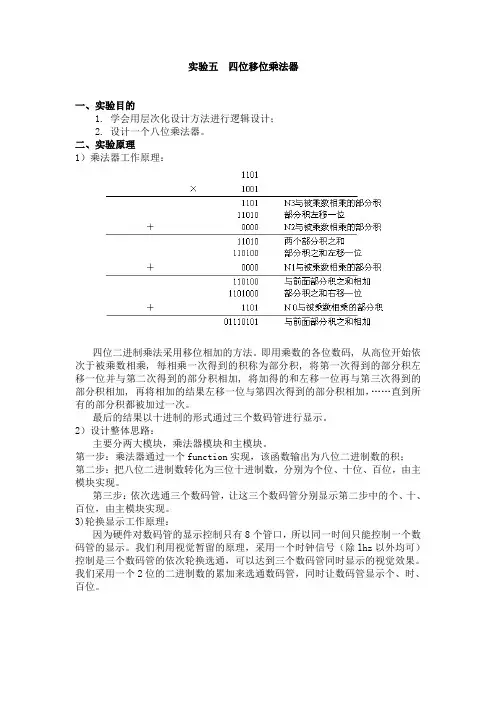
二、实验原理1)乘法器工作原理:四位二进制乘法采用移位相加的方法。
即用乘数的各位数码, 从高位开始依次于被乘数相乘, 每相乘一次得到的积称为部分积, 将第一次得到的部分积左移一位并与第二次得到的部分积相加, 将加得的和左移一位再与第三次得到的部分积相加, 再将相加的结果左移一位与第四次得到的部分积相加,……直到所有的部分积都被加过一次。
最后的结果以十进制的形式通过三个数码管进行显示。
2)设计整体思路:主要分两大模块,乘法器模块和主模块。
第一步:乘法器通过一个function实现,该函数输出为八位二进制数的积;第二步:把八位二进制数转化为三位十进制数,分别为个位、十位、百位,由主模块实现。
第三步:依次选通三个数码管,让这三个数码管分别显示第二步中的个、十、百位,由主模块实现。
3)轮换显示工作原理:因为硬件对数码管的显示控制只有8个管口,所以同一时间只能控制一个数码管的显示。
我们利用视觉暂留的原理,采用一个时钟信号(除lhz以外均可)控制是三个数码管的依次轮换选通,可以达到三个数码管同时显示的视觉效果。
我们采用一个2位的二进制数的累加来选通数码管,同时让数码管显示个、时、百位。
三、思路流程图四、实验流程图注意:时钟clk 给1M Hz六、实验心得1、把八位二进制数转化为三位十进制数,分别为个位、十位、百位:result1=out/100; //求出百位 result3=out%10; //求出个位 result2=(out%100)/10; //求出十位 2、个位、十位、百位必须用三个变量来存储,不能用一个三位的变量来存储,因为要存储的是十进制数,而一个三位的变量中的某一位只能是0或者1,无法表示一个十进制数。
3、看了很多同学的代码后发现大家用了模块调用,在这里我没有用调用,用一个FOR 循环,实现了代码简单。

实验5 组合逻辑电路的设计学生使用指导书实验项目名称:组合逻辑电路的设计实验学时:2实验要求:必做实验类型:设计型大纲要求:通过实验,掌握使用中、小规模集成电路来设计组合电路是最常见的逻辑电路的一般方法;通过实验,验证设计正确性。
一、实验目的掌握组合逻辑电路的设计与测试方法二、实验原理1、组合逻辑电路设计流程使用中、小规模集成电路来设计组合电路是最常见的逻辑电路。
设计组合电路的一般步骤如图5.1所示。
根据设计任务的要求建立输入、输出变量,并列出真值表。
然后用逻辑代数或卡诺图化简法求出简化的逻辑表达式。
并按实际选用逻辑门的类型修改逻辑表达式。
根据简化后的逻辑表达式,画出逻辑图,用标准器件构成逻辑电路。
最后,用实验来验证设计的正确性。
2、组合逻辑电路设计举例要求:使用“与非”门设计一个表决电路。
当四个输入端中有三个或四个为“1”时,输出端才为“1”。
设计步骤:根据题意列出真值表,如表5.1所示,再填入表决器卡诺图中,如表5.2所示。
B 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1C 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1Z 0 0 0 0 0 0 0 1 0 0 0 1 0 1 1 1DA00 01 11 10BC0001 111 1 1 110 1由卡诺图化简,得出逻辑表达式,并演化成“与非”的形式如下:Z=ABC+BCD+ACD+ABD根据逻辑表达式画出用“与非门”构成的逻辑电路如图5.2所示。
图5.2 表决电路逻辑图线路连接如下:实验线路选择2片74ls10(U1使用了全部的三个门,也可以每片使用2个门,避免连线拥塞);一片74LS20A、B、C、D四个输入引脚连接4个开关量输出开关(K3~K0);输出接LED指示。
实验验证逻辑功能:按上图接线,输入端A、B、C、D接至逻辑开关输出插口,输出端Z接逻辑电平显示输入插口,按真值表(自拟)要求,逐次改变输入变量,测量相应的输出值,验证逻辑功能,与表5.2进行比较,验证所设计的逻辑电路是否符合要求。
---------------------------------------------------------------范文最新推荐------------------------------------------------------ 移动机器人的避障实验设计+源程序+流程图摘要:随着科学技术的日益,机器人越来越融入到人们的生活。
近年来,特别是智能机器人的开发与研究引起了很多学者的关注。
其中,机器人的避障问题成为了机器人研究的热点。
传统的避障方法如可视图法、栅格法、自由空间法等算法可以解决障碍物信息己知时的情况。
但在试验条件确定的情况下,很多方法就比较复杂,因此,我根据现有的红外探头进行了简单的避障算法设计。
算法设计出来之后,对小车建立运动学模型,主要分为两块,一个是小车自身的运动学模型,一个是避障算法的建模。
建好之后就编程控制小车的运动,试验得到数据。
5267关键词:移动机器人避障算法运动学红外测距Mobile robot obstacle avoidance test design1 / 22Abstract:With the growing science and technology, robots become more integrated into people's lives.In recent years, in particular the development and research of intelligent robots has aroused the concern of many scholars.Robot obstacle avoidance has become a hot research spot.Traditional obstacle avoidance algorithm such as view method, grid method, free space method can solve obstacle information knownsituation.However, a lot more complicated in the case of the test condition determining.Therefore, in accordance with existing infrared probe I do simple obstacle avoidance algorithm design,Algorithm is designed, the kinematic model is established on the robot, mainly pided into two, one is the kinematic model of the trolley, another is obstacle avoidance algorithm modeling. Modeling programmed to control the movement of the trolley, then get the test data.Key words:Mobile robot, Obstacle avoidance algorithm, Kinematics, Infrared range目录---------------------------------------------------------------范文最新推荐------------------------------------------------------ 目录1绪论41.1引言41.2机器人概述41.3移动机器人国内外发展现状6其中移动机器人的智能避障更是机器人研究领域的研究热点。
实验四 恒压过滤常数的测定一、实验目的1、掌握过滤的基本方法;2、让学生熟悉恒压滤机的构造和操作流程;3、掌握在恒压下过滤常数K 、当量滤液体积q e 的求取;4、通过自动压力改变,体现操作压力对过滤速率的影响;5、观察过滤终了速率与洗涤速率的关系。
二、实验内容测定不同压力下恒压过滤的过滤常数K 、q e 、τe 。
三、实验原理1、概述过滤是一种常用的单元操作过程。
过滤的方式很多,有重力过滤、离心过滤、真空过滤、板框过滤等。
恒压过滤是板框过滤的一种形式,是在一定的压强差作用下迫使悬浮液通过一多孔介质,从而将固体颗粒截留,同时让液体通过介质。
实际上过滤也是一种使流体通过颗粒层的流动方式。
因为过滤装置简单,投资小,操作简便,常用于液固悬浮液的分离操作,在化工、冶金、制药、精细化工行业广泛被采用。
2、实验原理在实际应用恒压过滤方程和恒速过滤方程解决计算或进行工业设计时,必须先要测知方程中的过滤常数K ,e θ,e q 。
过滤常数的测定是用操作中所需处理的悬浮液在装置中进行。
板框压滤机是具有较长历史的间歇过滤设备,板和框一般制成正方形,板和框都在其对角线上开着四个圆孔,组装压紧后即构成供滤液、滤浆和洗涤液的流动通道。
过滤时悬浮液在一定的压差下经滤浆通道由滤框角端的暗孔进入框内;滤液分别穿过两侧的滤布,再经相邻滤板的凹槽汇集至滤液出口排走,固相则被截留于框内形成滤饼,待框内充满了滤饼,过滤即可停止。
若滤饼需要洗涤,要先关闭洗涤板下部的滤液出口则将洗涤液压入洗涤通道后,经洗涤板角端的侧孔进入两侧板面,洗涤液在压差作用下穿过一层滤布和整个滤框厚的滤饼层,然后再横穿一层滤布,由过滤板上的凹槽汇集至下部的滤液出口排出。
恒压条件下:K q K q q e 2+=θ此式表明恒压过滤情况下,q θ与q 之间为直线关系,直线斜率为1/K ,截距为K q e 2。
测出在一系列过滤时间θ内单位过滤面积上所获得的累积滤液量体积,并由此算出一系列q 值,从而得出一组对应的q θ值。