全自动洗衣机模糊控制器设计说明
- 格式:doc
- 大小:123.50 KB
- 文档页数:8
4.2.5模糊自动洗衣机的设计1990年日本松下电器首先设计生产了模糊洗衣机,这是世界上第一个应用模糊控制器的消费产品。
它根据洗涤衣物的种类、油腻和脏污程度,利用模糊控制系统自动选定洗涤时间和水流旋转强度。
作为设计模糊控制器的实际例子,下面介绍经过简化的模糊自动洗衣机控制器的设计原理,只考虑洗涤时间的自动选定。
1、确定模糊控制器的结构洗衣机利用分光光度计传感器,通过检测洗涤液的透明程度等方法,测出洗涤液中的污泥含量[0,100]%x ∈和油脂含量[0,100]%y ∈。
模糊控制器则根据x 和y 的数据,选定洗涤时间[0,60](t ∈分钟)。
因为只考虑洗涤时间,可以用双输入-单输出模糊控制器完成任务。
2、定义输入、输出量的模糊分布为了讲述的简便,所有模糊子集都选取三角形隶属函数。
选定三个模糊子集:污泥少(SD)、污泥中(MD)和污泥多(LD),用于涵盖输入量x 的论域[0,100],它们的隶属函数如下,其分布如图4-18所示。
()(50)/50050/50050()(100)/5050100()(50)/5050100SD x x x x x MD x x x LD x x x =-≤≤≤≤⎧=⎨-<≤⎩=-<≤图 4-18 覆盖污泥含量x 论域的模糊子集分布②选定三个模糊子集:油脂少(NG)、油脂中(MG)和油脂多(LG),用于涵盖输入量y 的论域[0,100],它们的隶属函数如下,其分布如图4-19所示。
()(50)/50050/50050()(100)/5050100()(50)/5050100NG y y y y y MG y y y LG y y y =-≤≤≤≤⎧=⎨-<≤⎩=-<≤图 4-19 覆盖油脂含量y 论域的模糊子集分布③选定五个模糊子集涵盖输出量t 的论域[0, 60]:很短(VS)、短(S)、中等(M )、 长(L)和很长(VL),它们的隶属函数如下,其分布如图4-20所示。

以洗衣机模糊控制为例的教学案例设计方法1. 引言1.1 研究背景洗衣机作为日常生活中常用的家用电器之一,已经成为人们生活中不可或缺的存在。
在洗衣机的发展过程中,传统的控制方法已经不能满足人们对洗衣机功能和性能的需求。
探讨利用模糊控制技术来提升洗衣机的控制精度和性能具有重要意义。
传统的洗衣机控制方法主要依赖于固定的控制规则和逻辑,对于复杂的洗衣过程往往无法做到精准控制。
而模糊控制技术则是一种基于人类模糊逻辑思维方式的控制方法,可以通过模糊集合和模糊推理来实现对系统的精准控制。
将模糊控制技术应用到洗衣机控制中,有望提高洗衣机的洗涤效果,降低能源消耗,提升用户体验。
在这样的背景下,本研究旨在探讨以洗衣机模糊控制为例的教学案例设计方法,通过对洗衣机模糊控制原理的深入研究和实践,为教学案例的设计提供理论支持和实践指导。
希望通过本研究能够促进模糊控制技术在家电领域的应用,提升洗衣机的智能化水平,为人们的生活带来更多便利和舒适。
1.2 研究目的研究目的是为了探讨如何通过洗衣机模糊控制的教学案例设计方法,提高学生对模糊控制原理的理解和掌握。
通过设计一个具体的案例,让学生在实际操作中体会到模糊控制的应用和优势,激发他们的学习兴趣和思维能力。
本研究旨在为教师提供一种有效的教学方法,帮助学生更好地学习和掌握洗衣机模糊控制技术,促进教学效果的提升和学习成果的达成。
通过研究教学案例设计方法,可以进一步完善模糊控制的教学体系,促进学生的综合素质和实践能力的提升,培养学生的创新精神和工程实践能力,为培养高素质工程技术人才提供有益的教学参考和借鉴。
2. 正文2.1 洗衣机模糊控制原理洗衣机模糊控制是一种应用于洗衣机控制系统中的智能控制方法。
其原理主要包括以下几个方面:1. 模糊控制原理:模糊控制是一种基于模糊逻辑的控制方法,其核心思想是通过模糊化输入和输出变量,以及一系列模糊规则来实现对系统的控制。
在洗衣机控制中,我们可以通过模糊化洗涤时间、水温、转速等变量,以及一系列模糊规则来实现对洗衣机的控制。
以洗衣机模糊控制为例的教学案例设计方法1. 引言1.1 介绍洗衣机模糊控制案例设计的背景洗衣机模糊控制是指利用模糊逻辑控制方法来实现洗衣机的控制系统,以实现更精确和高效的洗涤过程。
随着科技的不断发展,洗衣机模糊控制技术在工程领域的应用日益广泛,成为一个备受关注的研究领域。
洗衣机模糊控制案例设计的背景源于工程技术领域对模糊控制理论的探索和应用。
传统的洗衣机控制方法往往存在着精度不高、响应速度慢等问题,而模糊控制技术恰好能够很好地解决这些问题。
因此,设计一个基于模糊控制原理的洗衣机控制系统可以提高洗衣机的智能化水平,提升用户体验。
通过深入研究洗衣机模糊控制案例设计,可以帮助工程学生更好地理解模糊控制理论,并将其应用到实际工程中。
教学案例设计不仅可以加强学生的理论知识,还可以培养学生的实际操作能力和创新思维,为他们未来的工程实践打下坚实的基础。
1.2 说明教学案例设计的重要性和目的教学案例设计在工程教育中具有重要意义和作用。
通过设计真实案例,可以帮助学生将理论知识与实践应用相结合,提升他们的解决问题的能力和实践能力。
案例设计可以让学生在实际操作中体会到知识的实用性,培养他们的创新精神和团队合作能力。
教学案例设计也可以激发学生学习的兴趣,提升他们的学习动力和自主学习能力。
2. 正文2.1 介绍洗衣机模糊控制原理和技术洗衣机模糊控制是一种基于模糊逻辑理论的控制方法,旨在处理系统具有模糊性、不确定性和复杂性的特点。
在传统的控制方法中,通常需要建立系统的精确数学模型,但对于某些复杂系统来说,这是一项艰巨的任务。
而模糊控制则不需要系统的精确数学模型,而是基于专家经验和模糊规则进行控制,使得系统更容易实现控制。
洗衣机模糊控制的原理是将洗衣机的控制系统分为模糊化、模糊推理和去模糊化三个步骤。
首先,通过传感器获取洗衣机的运行状态数据,然后将这些数据转化为模糊概念,如“脏”、“湿”、“轻度污渍”等。
接着,利用模糊规则库进行模糊推理,根据模糊规则库和模糊概念之间的关系,确定洗衣机的控制策略。
随着智能家居的理念的深入,未来社会生活越来越向智能化方向发展。
而模糊理论系统应用于洗衣机上则是智能家居的重要部分之一。
智能洗衣机可以自动识别衣物材质、衣物量、水的浑浊度,并自动化决定放水量、洗涤剂的放入量、洗涤时间、洗涤次数、自动甩干等功能,全部自动化完成整个洗涤过程。
本文主要介绍了一种类型的模糊智能控制洗衣机的设计方案,它主要以STM8S105C6T6单片机为核心,通过各种传感器对衣物量、水温、水的浑浊度等检测,将测得的模拟信号转换成数字信号传送给STM8S105C6T6单片机,经过数据的处理,从而达到对洗衣机的模糊化智能控制,提高洗衣质量,节约能源,节省人们的宝贵时间,提升人们的生活品质。
关键词:模糊智能控制 STM8S105C6T6 传感器With the deepening of the concept of intelligent home, the social life will be more intelligentizing in the future.System and fuzzy theory is applied to the washing machine.it is one of an important part of intelligent household. Intelligent washing machine can automatically identify the amount of clothing materials, clothing and the turbidity of water, which can decided to put into the size of the water, detergent, washing time, washing times and automatic dry, automatically, completing the whole washing process.This thesis mainly introduces a type of fuzzy intelligent control washing machine design scheme, it mainly STM8S105C6T6 MCU as the core, the clothing, through all kinds of sensors, the turbidity of water detection, water temperature will be measured analog signals into digital signals to STM8S105C6T6 microcontroller, after computing data , the washing machine will be controlled automatically, improving the quality of laundry, economizing energy, saving the precious time of people, and improving people's quality of life.Key words:Fuzzy intelligent control STM8S105C6T6 Sensor目录摘要 (I)Abstract (Ⅱ)1绪论 (1)1.1引言 (1)1.2模糊控制系统的基本思路 (2)1.3模糊控制洗衣机控制系统的总体设计思路 (3)2模糊洗衣机(控制)系统设计的总体方案 (4)2.1模糊控制洗衣机系统的模糊推理 (4)2.2 控制器的选择与比较 (7)2.3洗衣机控制系统功能流程图 (7)2.4本章小结 (9)3模糊洗衣机控制系统的硬件设计 (10)3.1模糊控制洗衣机系统的硬件设计结构 (10)3.2芯片部分 (10)3.3电源部分 (12)3.4按键输入部分 (13)3.5传感器部分 (14)3.5.1 温度检测部分 (14)3.5.2重力传感器部分 (16)3.5.3水浑浊度检测部分 (17)3.6蜂鸣器部分 (18)3.7显示部分 (19)3.8主电机部分 (21)3.9本章小结 (23)4模糊洗衣机系统的软件设计 (24)4.1洗衣机控制器软件总体设计思想 (24)4.2主程序设计 (26)4.2.1 系统初始化模快 (26)4.2.2液晶显示部分 (26)4.2.3模拟量采集部分 (27)4.3本章小结 (29)5总结与展望 (30)5.1论文总结 (30)5.2后续工作展望 (30)致谢 (32)[参考文献] (33)1绪论1.1引言模糊控制是用模糊数学的只是模仿人脑的思维方式,对模糊现象进行识别和判决,给出精确地控制量,对被控对象进行控制。
全自动模糊控制洗衣机的设计摘要:本文将模糊控制引人洗衣机控制系统中, 根据洗衣机工作特点, 重点阐述了其模糊决策系统和主要检测电路, 并给出该洗衣机的控制程序流图。
关键字:模糊控制, 传感器本课题是受日本日立公司委托, 由上海交通大学电机系和计算机系合作开发的科研项目。
主要任务是以洗衣机作为被控对象, 设计一套应用于洗衣机的采用模糊控制理论的交流变频调速系统, 目的是只用一个键就能完成洗衣所有功能。
它有助于我国将模糊控制理论引人家用电器领域, 为我国家用电器智能化开拓思路。
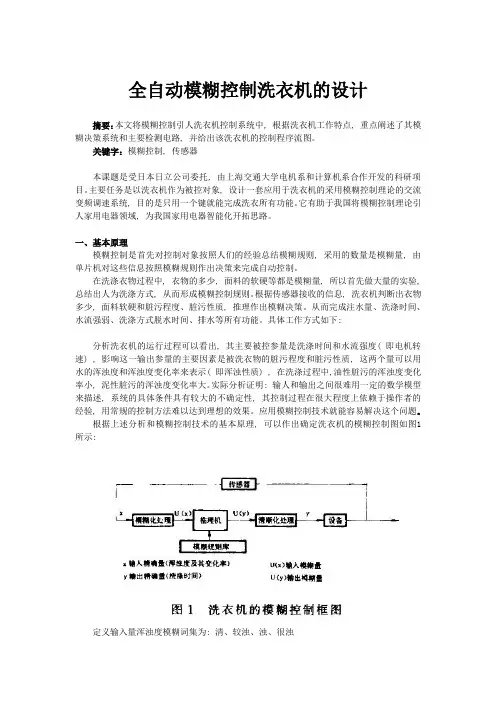
一、基本原理模糊控制是首先对控制对象按照人们的经验总结模糊规则, 采用的数量是模糊量, 由单片机对这些信息按照模糊规则作出决策来完成自动控制。
在洗涤衣物过程中, 衣物的多少, 面料的软硬等都是模糊量, 所以首先做大量的实验, 总结出人为洗涤方式, 从而形成模糊控制规则。
根据传感器接收的信息, 洗衣机判断出衣物多少, 面料软硬和脏污程度、脏污性质, 推理作出模糊决策。
从而完成注水量、洗涤时间、水流强弱、洗涤方式脱水时间、排水等所有功能。
具体工作方式如下:分析洗衣机的运行过程可以看出, 其主要被控参量是洗涤时间和水流强度( 即电机转速) , 影响这一输出参量的主要因素是被洗衣物的脏污程度和脏污性质, 这两个量可以用水的浑浊度和浑浊度变化率来表示( 即浑浊性质) , 在洗涤过程中,油性脏污的浑浊度变化率小, 泥性脏污的浑浊度变化率大。
实际分析证明: 输人和输出之间很难用一定的数学模型来描述, 系统的具体条件具有较大的不确定性, 其控制过程在很大程度上依赖于操作者的经验, 用常规的控制方法难以达到理想的效果。
应用模糊控制技术就能容易解决这个问题。
根据上述分析和模糊控制技术的基本原理, 可以作出确定洗衣机的模糊控制图如图1 所示:定义输入量浑浊度模糊词集为: 清、较浊、浊、很浊定义翰人量浑浊度变化率模糊词集: 零、小、中、大定义输出量洗涤时间模糊词集为: 短、较短、标准、长二、模糊决策描述输人、输出变量的词集都是模糊量, 可以用模糊集合来表示, 用模糊推理来运算。
洗衣机的模糊控制器设计1 洗衣机的模糊控制传统的洗衣机都是人们用肉眼观看后,根据人的经验来调整洗衣时间和用水量,而模糊控制就是以人对被控对象的控制经验为依据而设计的控制器,这样就能实现控制器模拟人的思维方式来控制洗衣机。
以模糊洗衣机的设计为例其控制是一个开环的决策过程,模糊控制按以下步骤进行。
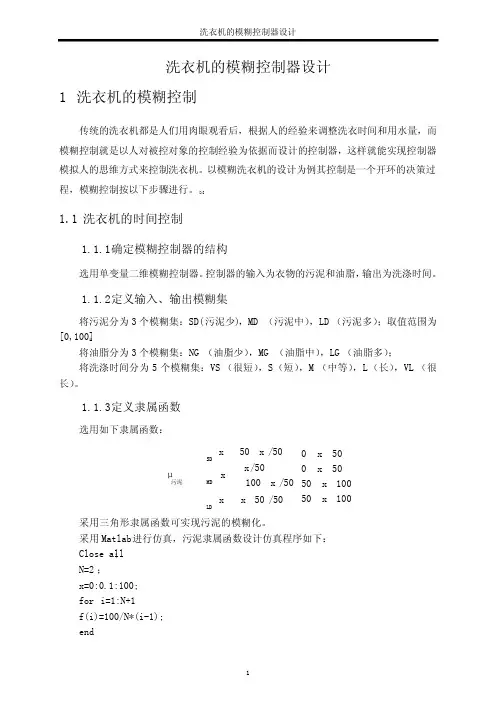
[4]1.1 洗衣机的时间控制1.1.1 确定模糊控制器的结构选用单变量二维模糊控制器。
控制器的输入为衣物的污泥和油脂,输出为洗涤时间。
1.1.2 定义输入、输出模糊集将污泥分为3个模糊集:SD(污泥少),MD (污泥中),LD (污泥多);取值范围为[0,100]。
将油脂分为3个模糊集:NG (油脂少),MG (油脂中),LG (油脂多); 将洗涤时间分为5个模糊集:VS (很短),S(短),M (中等),L(长),VL (很长)。
1.1.3 定义隶属函数选用如下隶属函数:50/5050/10050/50/50x x x x x x x μLDMD SD污泥1005010050500500 x x x x 采用三角形隶属函数可实现污泥的模糊化。
采用Matlab进行仿真,污泥隶属函数设计仿真程序如下: Close all ; N=2; x=0:0.1:100; for i=1:N+1 f(i)=100/N*(i-1); endu=trimf(x,[f(1),f(1),f(2)]); figure(1); plot(x,u); for j=2:Nu=trimf(x,[f(j-1),f(j),f(j+1)]); hold on; plot(x,u); endu=trimf(x,[f(N),f(N+1),f(N+1)]); hold on; plot(x,u); xlabel(‘x’);ylabel(‘Degree of membership ’); 污泥程序仿真结果如图1所示:01020304050607080901000.10.20.30.40.50.60.70.80.91xDe g r e e of m e m b e r s h i p图1 污泥隶属函数将油脂分为三个模糊集:NG (无油脂)MG (油脂中)LG(油脂多),取值范围为[0,100]选用如下隶属函数:50/5050/10050/50/50y y y y y y y LGMG NG油脂1005010050500500 y y y y 采用三角形隶属函数实现油脂的模糊化,仿真程序如下: Clear all; N=2; x=0:0.1:100; for i=1:N+1 f(i)=100/N*(i-1); endu=trimf(y,[f(1),f(1),f(2)]); figure (1); plot(y,u); for j=2:Nu=trimf(y,[f(j-1),f(j),f(j+1)]); hold on; plot(y,u); endu=trimf(y,[f(N),f(N+1),f(N+1)]); hold on; plot(y,u); xlabel(‘y’);ylabel(‘Degree of membership ’); 油脂程序仿真结果如图2所示:01020304050607080901000.10.20.30.40.50.60.70.80.91yDe g r e e of m e mb e r s h i p图2 油脂隶属函数将洗涤时间分为五个模糊集:VS(很短)S (短)M (中等)L(很长)取值范围为[0,60] 选用如下隶属函数:20/4020/6015/2515/4015/1015/2510/10/10z z z z z z z z z z z z z VLL M S VS洗涤时间604060404025402525102510100100 z z z z z z z z 采用三角形隶属函数实现洗涤时间的模糊化,其Matlab仿真程序如下: Close all; Z=0:0.1:60;U=trimf(z,[0,0,10]); Figure(1); Plot(z,u);U=trimf(z,[0, 10,25]); hold on; plot(z,u);U=trimf(z,[ 10,25,40]); hold on; plot(z,u);U=trimf(z,[ 25,40,60]); hold on; plot(z,u);U=trimf(z,[ 40,60,60]); hold on; plot(z,u); xlabel(‘z’)ylabel(“Degree of membership ”); 洗涤时间仿真程序结果如图3所示:01020304050600.10.20.30.40.50.60.70.80.91zDe g r e e of m e m b e r s h i p图3 洗涤时间隶属函数1.1.4 建立模糊控制规则根据人的操作经验设计模糊规则,模糊规则设计的标准为:“污泥越多,油脂越多,洗涤时间越长”;“污泥适中,油脂适中,洗涤时间适中”;“污泥越少,油脂越少,洗涤时将越短”。
以洗衣机模糊控制为例的教学案例设计方法教学目标:
1.了解模糊控制原理及算法,学会设计基于模糊控制的洗衣机控制系统;
3.培养学生模拟、计算和实验的能力,提高学生的实际动手能力。
教学方式:
课堂讲授、案例学习、实验演示、互动交流
教学内容:
一、模糊控制原理及算法
1.1 模糊控制的基本原理
1.2 模糊控制系统的建模方法
1.3 模糊推理规则的设计及模糊集合的划分
二、洗衣机控制系统设计
2.2 洗衣机传感器的选择
2.3 模糊控制器的设计及调试
2.4 洗衣机控制系统的实现
三、实验演示
教学流程:
第一节课:
2.讲解模糊控制的算法及其步骤。
1.讲解洗衣机控制系统的构成及传感器的选择。
2.设计一个洗衣机控制系统,包括传感器的选择、硬件的设计及软件的编写。
3.进行实验演示,测试系统的可行性。
2.进行模糊控制器的建模及仿真实验。
3.总结模糊控制的优缺点及其应用范围。
教学评估:
1.考试评估:期末考试
2.实验评估:对实验设计、实验操作及实验报告进行评估。
3.论文评估:对模糊控制算法及应用进行写作评估。
教学资料:
1.教材:《模糊控制原理与应用》
3.软件:MATLAB、Proteus、Keil等
教学反思:
洗衣机模糊控制教学案例设计,可以增强学生的动手实践能力,提高学生的理论知识水平和专业技能,有利于培养学生的探究能力和解决问题的能力。
同时,教学过程中也需要注意,让学生理解模糊控制的实际应用和必要性,引导学生关注实用性和工程应用,培养能解决实际问题的能力。
智能洗衣机模糊控制设计目录第一章前言 (1)1.1概述 (1)智能滚筒式洗衣机的特点 (2)智能滚筒式洗衣机的洗涤原理 (2)第二章设计方案的确定 (4)2.1洗衣机的技术参数和主要功能 (4)主要技术参数 (4)洗衣机的主要功能 (4)2.2控制系统设计方案 (4)第三章洗衣机的硬件设计 (6)3.1洗衣机的控制功能要求 (6)3.2控制逻辑电路 (6)3.3硬件描述 (7)3.4电子元器件的计算与选型 (8)时钟电路 (8)复位电路 (9)电源电路 (9)指示电路 (10)电机的正反转、进水阀和排水阀电路 (11)显示电路 (13)蜂鸣报警电路 (14)第四章系统软件设计 (15)4.1洗衣机的控制功能要求 (15)第五章总结 (18)致谢.............................................. - 19 -参考文献.............................................. - 20 -附录A 控制系统电路图.................................. - 21 -附录B 洗衣机的控制原理图.............................. - 22 -附录C 设备材料清单.................................... - 23 -附录D 软件程序........................................ - 24 -第一章前言1.1概述随着国民经济的发展,人民生活水平的提高,智能洗衣机作为将人们从繁复的家务劳动中解放出来的好助手,愈来愈受到消费者的欢迎。
洗衣机是利用电能产生机械作用来洗涤衣物的清洁电器。
按其额定洗涤容量(一次可洗涤的最大干衣物重量,以kg计算)分为家用和集体用两类。
中国规定洗涤容量在6kg以下的属于家用洗衣机。
按结构原理分为3种:①搅拌式(又称摆动叶式)。
第4章 神经模糊控制洗衣机设计20世纪90年代初期,日本松下公司推出了神经模糊控制全自动洗衣机。
这种洗衣机能够自动判断衣服的质地软硬程度、衣量多少、脏污程度和性质等,应用神经模糊控制技术,自动生成模糊控制规则和隶属函数,预设洗衣水位、水流强度和洗涤时间,在整个洗衣过程中实时调整这些参数,达到最佳的洗衣效果。
4.1 洗衣机的模糊控制洗衣机的主要被控参量为洗涤时间和水流强度,而影响这一输出参量的主要因子是被洗物的浑浊程度和浑浊性质,后者可用浑浊度的变化率来描述。
在洗涤过程中,油污的浑浊度变化率小,泥污的浑浊度变化率打。
因此,浑浊度及其变化率可以作为控制系统的输入参量,而洗涤时间和水流强度可作为控制量,计系统的输出,实际上,洗衣过程中的这类输入和输出之间很难用一定的数学模型来描述。
系统运行过程中具有较大的不确定性,控制过程在很大程度上依赖操作者的经验,这样一来,利用常规的方法进行控制难以奏效。
但是,如果利用专家知识进行控制决策,往往容易实现优化控制,这是在洗衣机中引入模糊控制技术的主要原因之一。
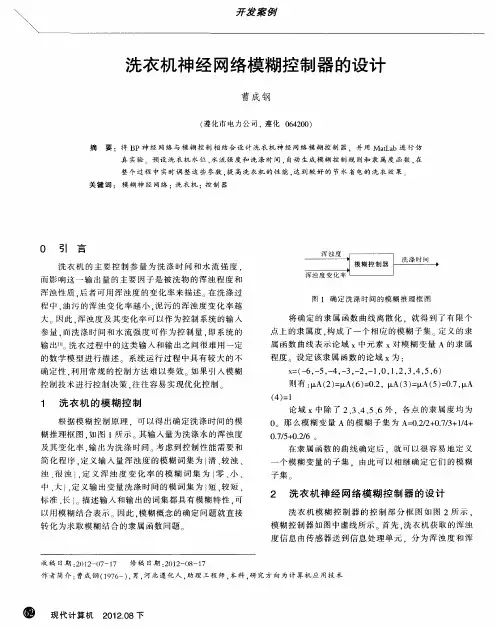
根据上述的模糊控制基本原理,可得出确定洗涤时间的模糊推理框图如图4-1所示。
其输入量为洗涤水的浑浊度及其变化率,输出量为洗涤时间。
考虑到适当的控制性能需要和简化程序,定义输入量浑浊度的模糊词集为清、较浊、浊、很浊;定义浑浊度变换率的模糊词集为零、小、中、大;定义输出变量洗涤时间的模糊词集为短、较短、标准、长。
描述输入输出变量的词集都具有模糊特性,可以用模糊集合表示。
因此,模糊概念的问题就转化为求取模糊集合的隶属函数的问题。
模糊控制器FC洗涤时间浑浊度浑浊度变化率图4-1 确定洗涤时间的模糊推理框图通常定义一个模糊子集,实际上就是确定模糊子集隶属函数形状的过程。
将确定的隶属函数曲线离散化,就得到了有限个点上的隶属度,构成了一个相应的模糊子集。
如图4-2所示,定义的隶属函数曲线表示论域x 对模糊变量A 的隶属程度。
实验一洗衣机模糊控制器设计实验二模糊PD控制器设计一、实验目的1.熟悉模糊控制的特征、结构以及学习算法2.掌握用MATLAB实现神经网络控制系统仿真的方法。
3.学习分析模糊控制器和常规PID的混合结构。
二、实验设备和条件计算机系统Matlab仿真软件三、实验原理和操作步骤众所周知,传统的PID控制器是过程控制中应用最广泛最基本的一种控制器,它具有简单、稳定性好、可靠性高等优点。
PID调节规律对相当多的工业控制对象,特别是对于线性定常系统控制是非常有效的。
其调节过程的品质取决于PID控制器各个参数的整定。
同时我们也注意到,考虑到模糊控制实现的简易性和快速性,通常以系统误差e和误差变化de为输入语句变量,因此它具有类似于常规的PD控制器特性。
经典的模糊PD控制器结构图如图所示,其中需要实现引入增益K和d K分别对误差信号及其变化率信号进行规范处理,使得其值域P范围与模糊变量的领域吻合,然后对这两个信号模糊化后的出的信号(d E E ,)进行模糊推理,并将得到的模糊化量解模糊化,得出变量U ,通过规范化增益u K 后就可以得出控制信号)(t u 。
四、实验内容假设受控对象模型为24.228()(0.5)( 1.648.456)G s s s s =+++设计一模糊控制器使其超调量不超过1%,输出的上升时间<0.3。
步骤1. 确定e ,de 和u 的论域 3. 规则的制定4. 推理方法的确定利用MATLAB 的Toolbox 工具1. 根据系统实际情况,选择e ,de 和u 的论域 e range : [-1 1] de range: [-0.1 0.1] u range: [0 2]2. e ,de 和u 语言变量的选取e 8个:NB,NM,NS,NZ,PZ,PS,PM,PBde 7个:NB,NM,NS,Z,PS,PM,PBU 7个:NB,NM,NS,Z,PS,PM,PL模糊规则确定eU NB NM NS NZ PZ PS PM PB PB PL PM NM NM NM NL NL NBPM PL PM NM NM NM NS NS NBPS PL PM NS NS NS NS NM NBZ PL PM PS Z Z NS NM NB deNS PL PM PS PS PS PS NM NBNM PL PL PS PS PM PM NM NBNB PL PL PL PM PM PM NM NB 隐含和推理方法的制定隐含采用‘mamdani’方法: ‘max-min‘推理方法,即‘min‘ 方法去模糊方法:面积中心法。
洗衣机模糊控制系统设计模糊控制是以模糊集合论、模糊语言变量及模糊逻辑推理为基础,将领域内的专家经验和知识总结出模糊控制规则,构成描述具有不确定性复杂对象的模糊关系,通过被控系统输出误差及误差变化和模糊关系的推理合成来获得控制量,从而实现对系统的控制。
模糊化接口的设计步骤事实上就是定义语言变量的过程,可分为以下几步:语言变量的确定2)语言变量和对应函数的设计在模糊控制器的设计中,通常就把语言变量的论域定义为有限整数的离散论域。
为了提高实时性,模糊控制器常常以控制查询表的形式出现。
该表反映了通过模糊控制算法求出的模糊控制器输入量和输出量在给定离散点上的对应关系。
为了能方便地产生控制查询表,在模糊控制器的设计中,通常就把语言变量的论域定义为有限整数的离散论域。
对于洗衣机来说,衣物的材质、质量和肮脏程度是影响洗涤过程和洗涤质量的3个重要因素。
由于在每次的洗涤过程中,待洗衣服的材质、质量和污浊程度是不同的,这就使得洗衣机所要处理的对象的状态是变化的,是模糊的。
采用模糊控制的洗衣机,则可以检测出衣物的污浊程度、材质和质量等影响洗衣过程的要素,利用模糊推理,确定出洗衣过程中的注水水位、洗涤水流、洗涤时间和洗涤次数等。
a)衣物质量的检测预先加人一定质量的水'电器启动一段时间,之后断电。
由于衣物的质量不同则造成电机断电之后的脉冲会有所不同,通过检测电机的脉冲而判断出洗衣桶内的衣物质量。
b)在确定衣物质量后,往洗衣机内注人最佳水位后重复上一过程。
由于衣物材质的不同,其阻力也会有所不同,同样检测电机脉冲而判断出衣物的材质。
c)浑浊度检测利用不同浑浊度的水的透光性不同的原理,光面三极管感应由发光二极管发出的穿过出水口中的光的强弱来来判定衣物的浑浊度。
模糊控制规则的建立洗涤流程阶段数由布质、布量、污性、污染程度决定。
推理所用原始数据主要根据经验确定,计算中先将输入变量值转化为模糊量,再根据输入模糊查表确定洗涤流程阶段数。
0引言传统的自动洗衣机需要人来设定相应的洗涤参数,如洗涤时间、水流强度和洗涤剂浓度等,模糊控制智能洗衣机则可以模拟人的思维完成洗涤参数的自动设定。
模糊洗衣机是利用模糊控制器代替人的大脑分析各种传感器检测的有关信息,如衣量、布质、水位、水温等,筛选出洗衣参数,达到类似人工选择的效果,实现洗衣机的全自动智能控制。
1硬件设计模糊洗衣机控制系统框图如图1。
模糊洗衣机主要由微处理器(STC89C52)、检测电路、驱动电路、控制面板和电源电路组成。
检测电路通过各传感器检测各有关信息送给微处理器分析,驱动电路将微处理器信号放大控制主电机运行和进排水阀的通断。
图1控制系统框图1.1水位检测电路水位检测采用水位传感器,水位传感器是一个LC 振荡电路,在洗衣机外桶上设有一气室,水位改变时,可改变气室内部压力大小,气压上升时,气室内部机构带动LC 振荡电路线圈向上移动,改变电感量,从而改变振荡电路的频率,微处理器通过检测频率的大小间接判断水位信息。
发出指令控制进排水阀的通断。
1.2布质和布量检测电路布质和布量检测是根据水位一定的情况下不同的布质和布量的阻尼不同来得到,洗涤时,切断电机电源,使电机工作于发电状态,通过测量此时定子绕组两端的反电动势可推得阻尼的大小,即可通过模糊推理粗略得出相应的布质和布量。
1.3浑浊度检测电路浑浊度传感器安装与洗涤筒底部,靠近排水阀进水口的位置,浑浊度传感器是利用红外发光二极管和光敏三极管获取洗涤液对光的通透程度来判定衣物脏污程度的发光二极管发出的光透过洗涤液照射到光敏三极管的基极,使光敏三极管基极电流、集电极电流发生变化,再将电流变化转换成电压变化。
洗涤液的脏污程度不同,发光二极管通过洗涤液照射到光敏三极管上的光强度不同,在光敏三极管上产生的电流强度不同。
微处理器依据接收到的电压信号的强弱,测知液体的浑浊度,推算出衣物的脏污程度,依据此数据决定水位、水流强度、洗涤时间等参数。
1.4水温检测电路水温检测电路采用温度传感器。
全自动洗衣机模糊控制器设计
1 简介
洗衣机自问世以来,经过一个多世纪的发展,现正呈现出全自动、多功能、大容量、高智能、省时节能的发展趋势。
近年来,电子技术、控制技术、信息技术的不断完善、成熟,为上述发展趋势提供了坚强的技术保障。
美国教授查徳(L.A.Zandeh)在1965年首先提出模糊集合的概念,由此打开了模糊数学及其应用的大门。
1974年英国教授马丹尼(E.H.Mamdani)首先将模糊集合理论应用于加热器的控制,创造了模糊控制的基本框架。
1980年,Sugeno开创了日本的首次模糊控制应用于一家富士电子水净化厂。
1983年他又开始研究模糊机器人。
随着模糊控制技术的不断发展,模糊控制逐渐被应用到日用家电产品的控制,例如电饭锅﹑照相机﹑吸尘器﹑洗衣机等。
模糊控制全自动滚筒洗衣干衣机是通过模糊推理找出最佳洗涤烘干方案,以优化洗涤烘干时间、洗净程度、烘干效果,最终达到提高效率,简化操作,节水节电省时的效果。
2 模糊洗衣机的基本原理
洗衣机的自动控制系统为一多输入多输出系统,输入量为衣质、衣量、脏污程度(即水的浑浊度)、脏污性质(浑浊度变化率);输出量为洗涤剂量、水位、水流、脱水时间、洗涤时间、漂洗方式等。
从洗衣机的运行过程可以看出,洗涤剂量、水位、水流、脱水时间都可以通过输入量推理求得,而洗涤时间与漂洗方式为实时控制量,影响其主要因素是被洗物品的脏污程度,这两个量可以用水的浑浊度和浑浊度变化率来表示,油性脏污的浑浊度变化率小,泥性脏污的浑浊度变化率大。
实际分析证明:输入与输出之间很难用一定的数学模型来描述,系统的具体条件具有较大的不确定性,其控制过程在很大程度上依赖于操作者的经验,用常规的控制方法难以达到理想的效果。
而采用模糊控制技术就能很容易解决问题。
因而采用了模糊控制器设计全自动洗衣机。
在洗涤衣物的过程中,衣物的多少、面料的软硬、衣物的脏污程度等都是模糊量,所以必须经过大量的实验,总结出人为的洗涤方式,从而形成模糊控制规则。
再根据检测系统检测到的信息,判断出衣物多少、面料软硬、脏污程度、脏污性质等,计算出控制量,从而完成注水量、洗涤时间、水流强弱、洗涤方式、脱水时间、排水等一列的设置。
根据上述分析和模糊控制技术的基本原理,可以确定洗衣机的模糊控制框如图。
3.模糊控制器的设计
3.1定义输入输出量的模糊分布
因为本文重点阐述由泥性肮脏度和油性肮脏度确定洗涤时间的模糊控制过程,所以定义了以下三个语言变量:
1、污泥分为三个指数表示:SD (污泥少)、MD (污泥中)、LD (污泥多)。
隶属函数如下所示:
()()()()()()⎪⎪
⎩⎪
⎪
⎨⎧-=⎩⎨⎧-=-==50/5050/10050/50/50x x x x x x x μLD
MD SD μμμ污泥
1005010050500500≤<≤<≤≤≤≤x x x x
三角隶属函数实现污泥的模糊化。
Matlab 仿真,污泥隶属函数设计程序
%Define N +1 triangle membership function clear all close all N = 2; x = 0:0.1:100; for i= 1:N + 1
f(i) = 100/N*(i - 1);
end
u = trimf(x,[f(1),f(1),f(2)]);
figure(1);
plot(x,u);
for j = 2:N
u = trimf(x,[f(j - 1),f(j),f(j + 1)]);
hold on;
plot(x,u);
end
u = trimf(x,[f(N),f(N + 1),f(N + 1)]); hold on;
plot(x,u);
xlabel(x);
ylabel(‘Degree of membership');仿真结果图3-1。
x
D e g r e e o f m e m b e r s h i p
图3-1 污泥隶属函数
选用以下隶属函数
()()()()()()⎪⎪
⎩⎪
⎪
⎨⎧-=⎩⎨
⎧-=-==50/5050/10050/50
/50y y y y y y y LG
MG NG μμμμ油脂
1005010050500500≤<≤<≤≤≤≤y y y y 三角形隶属函数实现油脂的模糊化,图3-2。
y
D e g r e e o f m e m b e r s h i p
图3-2 油脂隶属函数
选用以下隶属函数
()()()()()()()()()()()()⎪⎪⎪⎪⎪
⎩⎪
⎪
⎪⎪⎪
⎨⎧-=⎩⎨
⎧--=⎩⎨
⎧--=⎩⎨⎧-=-==20
/4020
/6015/2515/4015/1015/2510
/10/10z z z z z z z z z z z z z VL L M S
VS μμμμμμ洗涤时间
604060404025402525102510100100≤≤≤<≤≤≤<≤≤≤<≤≤≤≤z z z z z z z z 三角形隶属函数实现洗涤时间的模糊化,如图3-3所示。
z
D e g r e e o f m e m b e r s h i p
图3-3 洗涤时间隶属函数
4.建立模糊控制规则
根据人的操作经验设计模糊规则,模糊规则设计的标准为:
“污泥越多,油脂越多,洗涤时间越长”; “污泥适中,油脂适中,洗涤时间适中”; “污泥越少,油脂越少,洗涤时将越短”。
4.1模糊推理
a.规则匹配
假设当前传感器测得的信息为:0x (污泥)=60,0y (油脂)=70,分别代入所属的隶属函数中,求隶属度为
()5460=
MD μ,()5160=LD μ ()5370=G M μ,()5
2
70=LG μ
4种隶属度,4条匹配的模糊规则
表4-2 模糊推理结果
b.规则触发
表4-2,触发规则4条,即
1:IF y is MD and x is MG THEN z is M 2:IF y is MD and x is LG THEN z is L 3:IF y is LD and x is MG THEN z is L
4:IF y is LD and x is LG THEN z is VL
c.规则前提推理
在同一规则,通过“与”的关联得到规则结论。
前提的可信度之间通过取小运算,得到每一规则总前提可信度为
规则1 前提可信度:min(4/5,3/5) = 3/5
规则2 前提可信度:min(4/5,2/5) = 2/5
规则3 前提可信度:min(1/5,3/5) = 1/5
规则4 前提可信度:min(1/5,2/5) = 1/5
得到规则强度表,
表4-3 规则前提可信度
d.上述两个表进行“与”运算
得到每条规则总的可信度输出,
表4-4 规则总的可信度
e.模糊系统的输出
模糊系统总的可信度为各条可信度推理的并集,即
⎭
⎬
⎫⎩
⎨⎧
⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛=)(5min )(5min )(52min )(53min max )(z z z z z VL L L M agg μμμμμ,,,,,1,1, =⎭⎬⎫⎩
⎨⎧⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛)(5min )(52min )(53min max z z z VL L M μμμ,,,,1,[11]
有3条规则被触发。
5. 总结
模糊控制是一种非线性的控制方法,主要针对那些无法取得数学模型或数学模型相当粗糙的系统。
首先要对被控对象按照人们的经验总结出模糊规则,采用模糊量,借助单片机对这些信息按照模糊规则转换为控制量,来完成自动控制。
近年来,模糊控制在家用电器控制中得到较广泛的应用,采用模糊控制的洗衣机,可具有自动识别衣质、衣量、脏污程度、脏污性质、自动决定水量、自动投入恰当的洗涤剂等功能,不仅实现了洗衣机的全面自动化,也大大提高了洗衣的质量,具有很强的实用性和较好的发展前景。