第六章弯曲变形_材料力学
- 格式:doc
- 大小:1.37 MB
- 文档页数:15

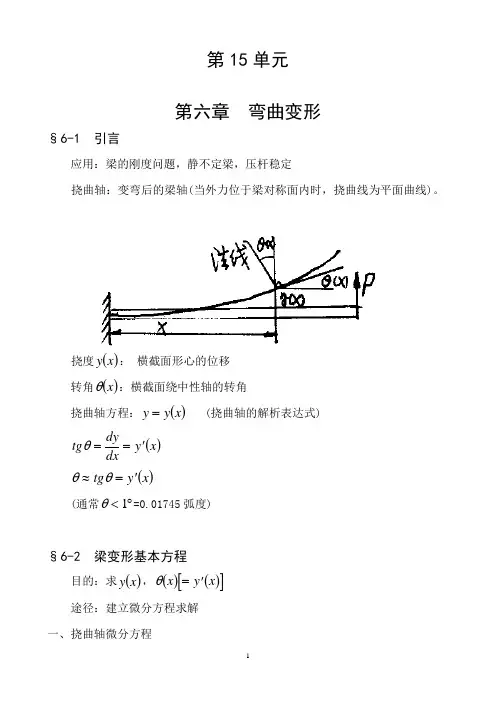
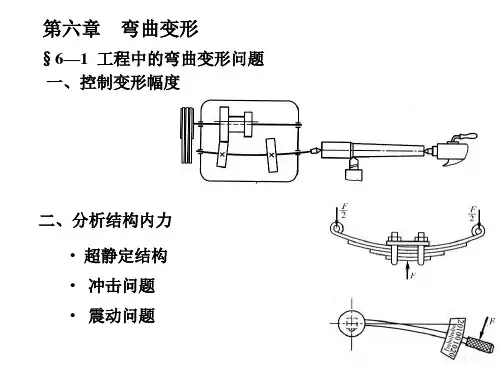
第15单元第六章 弯曲变形§6-1 引言应用:梁的刚度问题,静不定梁,压杆稳定挠曲轴:变弯后的梁轴(当外力位于梁对称面内时,挠曲线为平面曲线)。
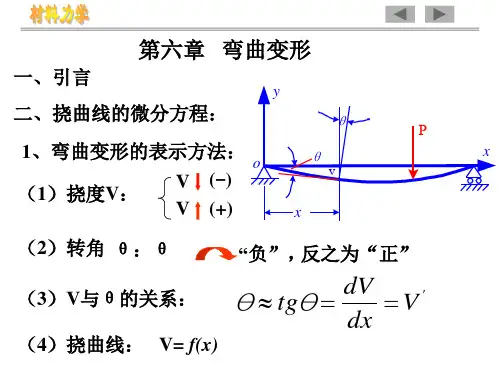
挠度()y x : 横截面形心的位移 转角()θx :横截面绕中性轴的转角挠曲轴方程:()y y x = (挠曲轴的解析表达式)()tg dy dxy x θ=='()θθ≈='tg y x(通常θ<︒1=0.01745弧度)§6-2 梁变形基本方程目的:求()y x ,()()[]θx y x =' 途径:建立微分方程求解 一、挠曲轴微分方程1.中性层曲率表示的弯曲变形公式()1ρ=M x EI(其中M 可以通过弯矩方程表示为x 的函数,ρ为曲率半径,它可由'y 和''y 表示) 2.由数学()11232ρ=±''+'y y3.挠曲轴微分方程()()±''+'=y y M x EI1232(1) 4.方程简化,挠曲轴近似微分方程 小变形,()'≈<y θ0.0175(弧度)'<<y 21112+'≈y ((1)式分母等于1)正负号确定——确定坐标系:y 向上''>y 0(从数学) ''<y 0M >0(本书规定) M <⇒选正号()∴''=y M x EI二、积分法计算梁的变形()θ='=+⎰y M x EI dx C()y M x EIdx Cx D =++⎰⎰C 、D 为积分常数,它由位移边界与连续条件确定。
三、位移边界与连续条件边界条件:固定端 y A A ==00,θ 固定铰,活动铰 0,0==F E y y 自由端:无位移边界条件 连续条件 y y C C C C 左右左右===00θθy y y y B BG G G G 左右左右左右===θθ例1:()M x M =0,()''=y x M EI 0()()θ='=+y x M EI x C 0()y x M EIx Cx D =++022由()()y D y C 00000=='==()()∴==y x M EIxx M EIx022θ例2:求挠曲轴微分方程AB 段: BC 段''=y M EI x l 10 ''=-⎛⎝ ⎫⎭⎪y M EI x l201y M EI x lC xD =++03116 y M EI x l x C x D =-⎛⎝ ⎫⎭⎪++0322262边界和连续条件()y 100= ()y l 20=y l y l 1222⎛⎝ ⎫⎭⎪=⎛⎝ ⎫⎭⎪(连续条件)'⎛⎝ ⎫⎭⎪='⎛⎝ ⎫⎭⎪y l y l 1222 (光滑条件)四个方程定4个常数()()y x M x lEI x l 1022244=- ()()y x M x l EIl2024=-例3:1.画剪力弯矩图2.列挠曲线的位移和连续条件3.画挠曲线大致形状(注明凹凸性与拐点) 位移与连续条件 A :()y 100= B:()()()()a y a y a y a y 2121'='=,C:()()020232==a y a y ,()()a y a y 2232'=' D:无挠曲线大致形状的画法 (1)根据弯矩图定凹凸性, +→⋃-→⋂,(2)弯矩图过零点处为拐点 (3)支座限定支座处的位移§6-3 计算梁位移的奇异函数法奇异函数法仍属积分法。



实例
车床主轴:变形过大,会使齿轮啮合不良,轴与轴承产生非均匀磨损
,产生噪声,降低寿命,影响加工精度。
吊车梁:变形过大会出现小车爬坡现象,引起振动。
研究变形目的
建立刚度条件,解决刚度问题
建立变形协调条件,解决超静定问题
为振动计算奠定基础。
概念
以简支梁为例,以变形前的轴线为x轴,垂直向上为y轴,xoy平面为梁的纵向对称面。
挠曲线:
在对称弯曲情况下,变形后梁的轴线为xoy平面内的一条曲线,此曲线称为挠曲线
挠度:
梁的任一截面形心的竖直位移称为挠度。
挠曲线的方程式:
转角:
弯曲变形中,梁的横截面对其原来位置转过的角度θ,称为截面转角。
根据平面假设,梁的横截面变形前,垂直于轴线,变形后垂直于挠曲线。
故
:
挠度w和转角θ是度量弯曲变形的两个基本量。
挠度与转角符号规定:在图示坐标中,挠度向上为正,反时针的转角为正。
此式为挠曲线的近似微分方程。
挠曲线的曲率表示式:
纯弯曲:
横力弯曲:
“
细长梁,
忽略Fs影响。
挠曲线的曲率表达式
纯弯曲:
(a)
横力弯曲:
对细长梁而言,忽略剪力Fs的影响
(b)
高等数学中对曲率的定义及表达式
于是式(a)转化为
(c)
在我们选定的坐标系内,若弯矩M 为正,则挠曲线向下凸,(如图所示),随着弧长S的增加,θ也是增加的,即正增量d S对应的dθ也是正的,于是考虑符号后,式(c)可写成
(d)因为
所以
注意到
代入式(d)及:
(e)
此为挠曲线的微分方程,适用于弯曲变形的任意情况,它是非线性的。
在小变形的情况下,梁的挠度w一般都远小于跨度,挠曲线w=f(x)是一非常平坦的曲线,转角θ也是一个非常小的角度,于是
(f)
式(e)
,
于是式(e)可写成
(g)
此式为挠曲线的近似微分方程。
挠曲线的近似微分方程
对等直梁而言,EI为常量,于是上式可写成
积分可得转角方程,再积分可得挠曲线方程
边界条件:
在挠曲线的某些点上,挠度或转角有时是已知的这类条件称为边界条件。
连续条件:
挠曲线是一条光滑连续的曲线,在挠曲线的任一点上有唯一确定的挠度和转角这就是连续条件。
刚度条件:
例题
Example1
图示梁受均布载荷,已知,试用积分法求梁的转角和挠度方程,、 .
Solution.
列弯矩方程:
列微分方程及积分
求积分常数
边界条件:当时,
∴
转角方程及挠度方程:
求,
将=0代入以上二式
Example2
内燃机的凸轮轴或齿轮轴计算简图,试求转角方程及挠度方程,及、。
Solution.
求反力:
列弯矩方程:
(AC)
(CB)
列微分方程及积分
(AC)
(CB)
求积分常数
边界条件:
连续条件:
∴
转角方程及挠度方程
(AC)
(a)
(b)
(CB)
(c)
(d)
最大挠度,最大转角
当时,
当时,
若,则,
若,则,
最大挠度
当时,为极值,所以应首先确定为零的截面位置。
.
若在式(a)中,令,可求的
若,则为正值。
可见从截面A到截面C转角由负变正,改变了符号,挠曲线既为光滑连续曲线,=0的截面必然在(AC)段。
令式(a)等于零:
即为挠度为最大值的截面横坐标。
以代入式(b)的最大挠度
当F作用于中点时,即,最大挠度发生在中点。
极端情况,当F无限接近右支座时,以省略,于是
可见即是在这种极端情况下,最大挠度仍然发生在跨度中点附近,也就是最大挠度总在靠近跨度中点。
所以可以用跨度中点的挠度近似代替最大挠度,因此,在式(b)中令
求出跨度中点挠度为:
即是在极端情况下,→0时
误差分析:
用代替所引起的误差
结论
可见在简支梁中,只要挠曲线无拐点,总可用跨度中点的挠度代替最大挠度不会引起很大误差。
优点:
可以求得挠曲线的转角方程和挠曲线方程,因此可求任意截面的转
角和挠度是最基本的方法。
缺点:
积分法比较麻烦。
在小变形,线弹性前提下(材料服从胡克定律),挠度与转
角均与载荷成线性关系。
因此,当梁上有多个载荷作用时,可以分别求出每一
载荷单独引起的变形,把所得变形叠加即为这些载荷共同作用时的变形,这就
是弯曲变形的叠加法。
为了便于工程计算,把简单基本载荷作用下梁的挠曲线方程,最大挠度,
最大转角计算公式编入手册,以便查用。
Example 1
Given:
Find :,
,
Solution:
查表P190
Example 2
Given:
Find :,,,
Solution:
P189-190
查表
多余约束(redundant restraint)
多余支反力(redundant reaction)
相当系统(equivalent system)静定基
变形比较法
超静定梁求解步骤
判断梁的静不定度;
解除“多余”约束,代之以相应的多余支反力,得到原静不定梁的相当系统;
基本静定梁变形情况与原超静定梁变形情况应该相同,这就是变形协调条件。
由变形协调条件和力与变形间的物理关系求得补充方程;
由平衡方程和补充方程求得全部支座反力或内力。
三度静不定
支座沉陷
梁的刚度条件
梁的合理刚度设计
梁的变形除了与梁的支承和载荷情况有关外,还与材料、截面和跨度有关。
挠度的最大值可综合概括为:
由上式可见,欲提高梁的抗弯刚度,可采取如下措施。
提高梁弯曲刚度的措施
增大梁的抗弯刚度EI
由于各类钢材的弹性模量E值相差甚少,因此虽采用高强度钢可以大大提高梁
的强度,但对增大梁的刚度却意义不大。
增大截面的惯矩I是提高刚度的主要途径。
与此同时强度也可得以提高。
从刚度方面考虑,应增大整个梁截面的惯矩I。
(在同一强度下,变截面梁比等截面梁的柔性大。
减小梁的跨度或增加支承
梁的挠度(或转角)与跨度的n次幂成正比,因此为减小梁的变形,采取减小梁跨的办法是一个很有效的措施。
利用对梁采取增加支承的办法,会使梁的最大挠度值降低。
增加约束后,原来的静定梁就会变成超静定梁。
减小弯矩数值
由于弯矩是引起梁弯曲变形的主要因素,因此减小弯矩数值也是提高梁弯曲刚度的一项重要措施。
.
图示结构中CD为刚性杆,C、D处为铰接,AD与DE梁的EI相同,试求E端约束反力
解:
一次超静定,去掉钢杆CD,代以反力F,且CD为钢杆,故
,。