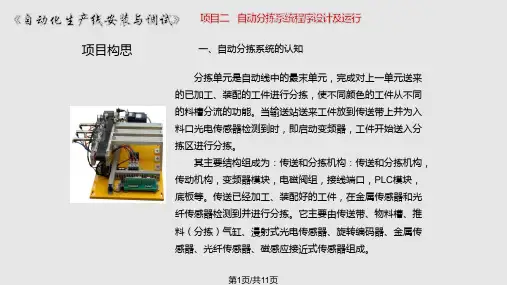
大小球分拣系统PLC控制ppt课件
- 格式:ppt
- 大小:5.83 MB
- 文档页数:16
大小球分拣系统
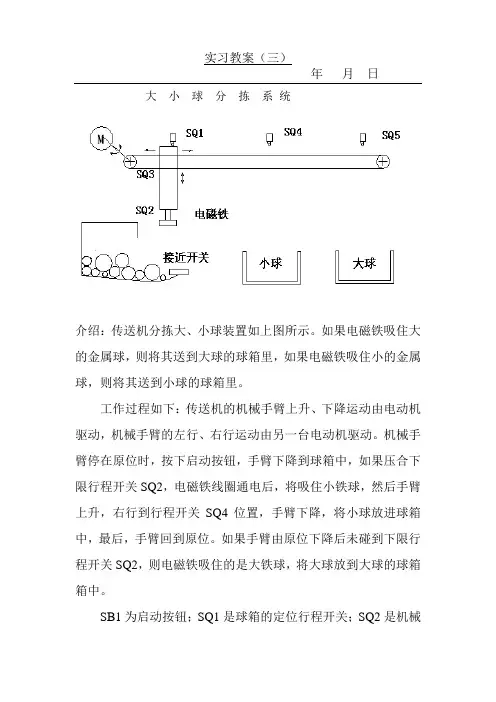
介绍:传送机分拣大、小球装置如上图所示。
如果电磁铁吸住大的金属球,则将其送到大球的球箱里,如果电磁铁吸住小的金属球,则将其送到小球的球箱里。
工作过程如下:传送机的机械手臂上升、下降运动由电动机驱动,机械手臂的左行、右行运动由另一台电动机驱动。
机械手臂停在原位时,按下启动按钮,手臂下降到球箱中,如果压合下限行程开关SQ2,电磁铁线圈通电后,将吸住小铁球,然后手臂上升,右行到行程开关SQ4位置,手臂下降,将小球放进球箱中,最后,手臂回到原位。
如果手臂由原位下降后未碰到下限行程开关SQ2,则电磁铁吸住的是大铁球,将大球放到大球的球箱箱中。
SB1为启动按钮;SQ1是球箱的定位行程开关;SQ2是机械
手臂下降时下限行程开关,除限位作用外还要判断机械手臂抓的是大球还是小球;SQ3是机械手臂上升时限位行程开关;SQ4和SQ5分别是小球球箱和大球球箱定位行程开关。
一、输入输出地址表
SB1为启动按钮,SQ1是球箱的定位行程开关,SQ2是机械手臂下降时下限行程开关,除限位作用外还要判断机械手臂抓住的是大球还是小球;SQ3是机械手臂上升时限位行程开关;SQ4和SQ5分别是小球球箱和大球球箱定位行程开关。
二、状态流程图。
题目PLC控制大小球分拣系统设计姓名学号系(院)________班级__________ 指导教师________职称__________年月日装订线摘要机械手的积极作用正日益为人们所认识,其一,它能部分地代替人的劳动并能达到生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送。
因为,它能大大地改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐。
因此,受到各先进单位的重视并投入了大量的人力物力加以研究和应用。
尤其在高温、高压、粉尘、噪声的场合,应用得更为广泛。
在我国,近代几年来也有较快的发展,并取得一定的成果,受到各工业部门的重视。
在生产过程中,经常要对流水线上的产品进行分捡,本课题拟开发物料搬运机械手,采用日本三菱公司的FX2N系列PLC,对机械手的上下、左右以及抓取运动进行控制。
用于分捡大小球的机械装置。
我们利用可编程技术,结合相应的硬件装置,控制机械手完成各种动作。
关键词:机械手 PLC 大小球装订线目录摘要................................................................................................................................ I 目录.............................................................................................................................. II 第一章 PLC应用系统设计基础 (1)1.1 PLC控制系统设计的原则和内容 (1)1.2 PLC的选型 (1)第二章 PLC控制系统硬件设计 (3)2.1 按钮和行程开关的选择 (3)2.2接近开关、转换开关、刀开关的选择 (3)2.3时间继电器、接触器的选择 (4)2.4熔断器、电动机的选择 (4)2.5电磁阀的选择 (5)第三章大小球分选系统中PLC机械手的设计 (6)3.1机械手总体结构方案分析 (6)3.2程序设计的总体结构 (8)3.3 I/O口设备及I/O口点分配表 (9)3.4状态流程图和梯形图 (10)第四章调试 (13)4.1基本指令顺序控制程序 (13)4.2基本指令与步进指令控制程序 (13)4.3基本指令、初始状态指令配合步进指令顺序控制程序 (13)第五章总结与展望 (14)5.1 总结 (14)5.2 本文存在不足和工作展望 (14)参考文献 (15)致谢 (16)装订线第一章 PLC应用系统设计基础PLC应用系统设计主要包括硬件设计、软件设计、施工设计和安装调试等内容。
摘要大、小球分拣传送以其对人们生活的积极影响特别是在工业上的普遍应用不断被人们所认识,作为可操控机械,它能够部分地代替人的劳动并能达到生产工艺的要求,遵循事先设定的步骤来完成工件的分拣传送,大大地节省了人类的劳动时间,更因其能适应复杂的环境,从而改善了人们的工作环境。
随着科技的不断发展,在工业领域其应用范围不断增加,并取得了一定的成果。
本课题设计了大、小球的分类选择传送系统,采用日本三菱公司的FX2N系列PLC,对机械臂的上下、左右移动以及对球的抓取和释放的运动过程进行控制。
我们利用可编程控制技术,并结合相应的硬件装置,来控制机械臂完成各种动作,实现大小球的分类选择传送。
关键词:PLC , 大小球, 机械臂, 原点显示第一章概述1.1选题背景大、小球选择分类传送作为工业中器件选择传送的一个写照,在工业控制中它的应用领域不断拓宽。
它能够通过编程来完成各种预期的作业任务,并能在各种复杂环境中工作,在构造和性能上兼有人和机器各自的优点,尤其在人工智能方面大大地增加其效率,同时也改善了人类的工作环境与工作强度。
中国在科技发展方面发展水平较低,在工业中分拣传送劳动密集型还占有相当大的份额。
由于人的劳动能力有限,并且人不能持续长时间的高强度工作,因此在劳动效率上往往是制约企业发展的关键性因素,为了提高劳动效率,抢占市场份额,各个企业也不断的引进和更新自动化设备来提高效率,同时降低人的工作强度。
因而这种自动化控制在工业控制中有很大优势。
1.2可编程控制器介绍可编程控制器起源于20世纪60年代末期,70年代随着微处理器的出现,使其真正成为具有计算机特征的工业控制装置。
随着科技的不断进步,可编程控制器也更加适用于现代工业的需要。
可编程控制器未来主要朝着以下方向发展:进一步加快CPU处理速度;变革操作控制方式,以增加对输入输出快速反应能力;由整体结构向小型模块化结构发展,增加配置的灵活性,降低成本;进一步系统提高可靠性。
题目:大、小球分类选择传送PLC控制
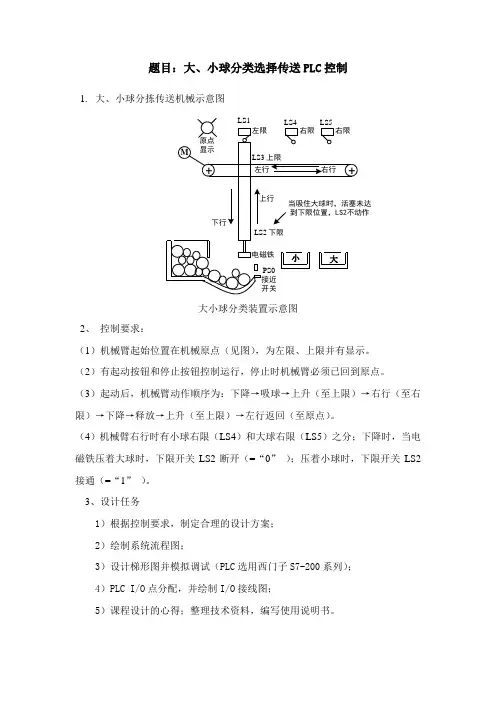
1.大、小球分拣传送机械示意图
大小球分类装置示意图
2、控制要求:
(1)机械臂起始位置在机械原点(见图),为左限、上限并有显示。
(2)有起动按钮和停止按钮控制运行,停止时机械臂必须已回到原点。
(3)起动后,机械臂动作顺序为:下降→吸球→上升(至上限)→右行(至右限)→下降→释放→上升(至上限)→左行返回(至原点)。
(4)机械臂右行时有小球右限(LS4)和大球右限(LS5)之分;下降时,当电磁铁压着大球时,下限开关LS2断开(=“0”);压着小球时,下限开关LS2接通(=“1”)。
3、设计任务
1)根据控制要求,制定合理的设计方案;
2)绘制系统流程图;
3)设计梯形图并模拟调试(PLC选用西门子S7-200系列);
4)PLC I/O点分配,并绘制I/O接线图;
5)课程设计的心得;整理技术资料,编写使用说明书。
目录第一章PLC在大小球分类系统中的设计............ .......2.1系统的功能.....................................2.2 大小球分类系统的结构...........................2.3确定I/O信号数量,选择PLC的类型..............2.4 大小球分类的设计思想..........................2.5电路设计及I/O接线方式......................... .2.6 大小球分类控制的I/O接线图....................2.7 I/O编址及工作框图.............................第二章械手分类大小球系统的控制程序....................3.1 机械手分类大小球控制的程序流程图..............3.2大小球分类程序的梯形图及指令表............第二章总结.........................................第一章PLC在大小球的分拣系统中的设计1.1系统的功能机械手分拣大小球的控制功能要求为:1.机械臂起始位置在机械原点(见图1-1),为左限、上限的交点位置。
2.有启动按钮和停止按钮控制运行,按下设备停止按钮后机械臂必须回到原点。
3.启动后,机械臂动作顺序为:下降→吸球→上升(延时1S)→右行(延时1S)→下降→释放→上升(至上限)→左行返回(至原点)。
4.机械臂有形式有小球右限(SQ4)和大球右限(SQ5)之分;下降时,当吸盘吸到大球时,下限开关SQ2断开(=“0”);吸着小球时,下限开关SQ2接通(=“1”)1.2大小球分拣系统的结构机械手分拣大小球的工作示意图如图1.1所示:图1.1 机械手分拣大小球的工作示意图1.3确定I/O信号数量,选择PLC的类型对于开关量控制系统的应用系统,当对控制要求不高时,可选用小型PLC 就能满足要求,如对小型泵的顺序控制、单台机械的自动控制等。
摘要机械手的积极作用正日益为人们所认识,其一,它能部分地代替人的劳动并能达到生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送。
因为,它能大大地改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐。
因此,受到各先进单位的重视并投入了大量的人力物力加以研究和应用。
尤其在高温、高压、粉尘、噪声的场合,应用得更为广泛。
在我国,近代几年来也有较快的发展,并取得一定的成果,受到各工业部门的重视。
在生产过程中,经常要对流水线上的产品进行分捡,本课题拟开发物料搬运机械手,采用三菱公司的FX2N系列PLC,对机械手的上下、左右以及抓取运动进行控制。
用于分捡大小球的机械装置。
我们利用可编程技术,结合相应的硬件装置,控制机械手完成各种动作。
关键词:机械手、PLC、大小球目录第一章概述1.1 设计介绍------------------------------------------31.2 控制要求------------------------------------------31.3 PLC的定义---------------------------------------31.4 PLC的工作原理---------------------------------41.5 PLC控制系统设计的原则和内容-----------------------------------------------------------------5 第二章硬件设计2.1 系统的功能----------------------------------------62.2 大小球分拣系统的结构-------------------------62.3 I/O编址及工作框图-----------------------------72.4 大小球分拣的设计思想-------------------------72.5 电路设计及I/O接线方式-----------------------8 第三章软件设计3.1 顺序流程图---------------------------------------93.2 梯形图---------------------------------------------103.3 程序指令表---------------------------------------11 第四章软硬件调试4.1 程序调试-----------------------------------------134.2 使用说明-----------------------------------------134.3 设计感想-----------------------------------------13 心得体会----------------------------------14 参考文献----------------------------------15第一章概述1.1设计介绍本课程设计主要对PLC程序的结构、特点、各器件的性能以及对被控对象的控制过程进行具体研究,并通过PLC来实现对大小球分拣系统的控制,随着工业自动化、机械化进程的加速,自动控制正在逐步取代传统的人工控制,在改善工作人员的工作环境的同时也使生产效率大大的提高,为了最大限度地满足被控对象和产生过程的控制要求。