东南大学物理课程论文机械振动与RLC电路
- 格式:doc
- 大小:283.43 KB
- 文档页数:5


机械振动学课程总结报告第一章 机械振动学基础第一节 引言机械系统振动问题的研究包括以下几方面的内容: 1、建立物理模型; 2、建立数学模型; 3、方程的求解; 4、结果的阐述。
利用振动:1、振动筛选。
振动给料机,振动粉碎机;2、测量传感器。
地震仪;3、其他。
振动害处:1、1940年美国塔克马海峡吊桥坍塌;2、1972年日本海南电厂的66瓦发电机组主轴断裂分散;3、我国的运输受损;4、影响机械使用寿命;5、噪声。
振动的三类问题:1、动力响应问题,正问题;2、系统辨识,第一个逆问题;3、环境预测,第二个逆问题。
振动系统分类:1、按运动微分方程的形式可分为:⎩⎨⎧非线性系统线性系统2、按激励的有无和性质可分为:⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧参数振动自激振动随机振动强迫振动自由振动固有振动第二节 机械振动的运动学概念从运动学的观点看,机械振动是研究机械振动的某些物理量在某一数值近旁随时间t 变化的规律。
如果这种规律是确定的,则可以用函数关系式:x=x (t )来描述其运动。
周期运动:运动的函数值,对于相差常数T 的不同时间有相同的数值,亦即可以用周期函数x (t )=x (t+nT ) n=1、2……来表示。
其中,T ——运动往复一次所需的时间间隔,叫做振动的周期;f ——周期的倒数,叫做振动的频率。
非周期振动:没有一定的周期的运动。
如机械系统收到冲击而产生的振动,旋转机械在启动过程中产生的振动。
随机振动:不能用确定的时间函数来表达的运动,我们无法预测某一时刻振动物理量的确定值,这类问题要用概率统计的方法研究。
如车辆在行走过程中的振动。
简谐振动——最简单的振动位移-时间函数(三角函数式):)()(φπϕπ+==t 2sin -t 2cos x TA TA式中:A ——运动的最大位移,叫做振幅;φϕ和——决定了开始振动是点的 位置,叫做初相角,有ϕπφ-2=;ω——叫做角频率或圆频率,f 22πωπω==或T。
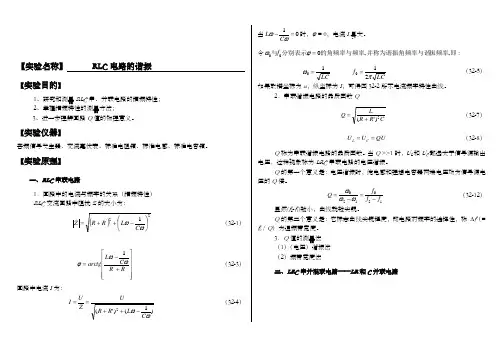
【实验名称】 RLC 电路的谐振【实验目的】1、研究和测量RLC 串、并联电路的幅频特性;2、掌握幅频特性的测量方法;3、进一步理解回路Q 值的物理意义。
【实验仪器】音频信号发生器、交流毫伏表、标准电阻箱、标准电感、标准电容箱。
【实验原理】一、RLC 串联电路1.回路中的电流与频率的关系(幅频特性)RLC 交流回路中阻抗Z 的大小为:()22'1⎪⎭⎫ ⎝⎛-++=ωωC L R R Z (32-1)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+-=R R C L a r c t g '1ωωϕ (32-3)回路中电流I 为:)1()'(2ωωC L R R UZU I -++==(32-4)当01=-ωωC L 时,ϕ = 0,电流I 最大。
令即振频率并称为谐振角频率与谐的角频率与频率分别表示与,,000=ϕωf :LCf LC πω21100==(32-5)如果取横坐标为ω,纵坐标为I ,可得图32-2所示电流频率特性曲线。
2.串联谐振电路的品质因数QCR R LQ 2)'(+=(32-7)QU U U C L == (32-8)Q 称为串联谐振电路的品质因数。
当Q >>1时,U L 和U C 都远大于信号源输出电压,这种现象称为LRC 串联电路的电压谐振。
Q 的第一个意义是:电压谐振时,纯电感和理想电容器两端电压均为信号源电压的Q 倍。
120120f f f Q -=-=ωωω (32-12) 显然(f 2-f 1)越小,曲线就越尖锐。
Q 的第二个意义是:它标志曲线尖锐程度,即电路对频率的选择性,称 ∆f (=f 0 / Q )为通频带宽度。
3.Q 值的测量法(1)(电压)谐振法 (2)频带宽度法二、LRC 串并混联电路——LR 和C 并联电路图32-3 LRC 串并混联电路 22222)()1()(ωωωRC LC L R Z +-+=当交流电的角频率满足关系式:2)(1LRLC -=ω时,信号源的输出电压也与输出电流相同。
rlc振荡电路实验报告RLC振荡电路实验报告引言:RLC振荡电路是一种重要的电路结构,广泛应用于通信、控制系统以及电子设备中。
本实验旨在通过搭建RLC振荡电路并进行实验验证,探究电路的振荡条件、频率响应以及振荡稳定性等相关特性。
1. 实验目的本实验的主要目的是:- 了解RLC振荡电路的基本原理和工作机制;- 熟悉搭建RLC振荡电路的方法和步骤;- 掌握测量振荡电路的频率响应和振幅稳定性的实验方法。
2. 实验器材和装置本实验所需的器材和装置有:- RLC振荡电路实验箱;- 可调直流电源;- 函数信号发生器;- 数字示波器;- 电阻、电容、电感等元件。
3. 实验步骤3.1 搭建RLC振荡电路首先,根据实验箱上的电路图,按照电路图连接电阻、电容和电感等元件,搭建RLC振荡电路。
注意保持电路的稳定性和可靠性,并确保元件之间的连接正3.2 设置电源和信号发生器将可调直流电源连接到电路中,并设置合适的电压值。
接下来,将函数信号发生器连接到电路的输入端,设置合适的频率和振幅。
3.3 测量频率响应使用数字示波器测量电路的频率响应。
逐渐增加信号发生器的频率,观察电路的振荡情况,并记录下振荡频率的变化。
通过实验数据的分析,得出电路的频率响应曲线。
3.4 测量振幅稳定性在振荡频率的范围内,逐渐改变电源电压,观察电路的振荡振幅变化情况,并记录下相应的数据。
通过实验数据的分析,得出电路的振幅稳定性曲线。
4. 实验结果与分析根据实验数据和观察结果,得出以下结论:- RLC振荡电路在一定的频率范围内能够实现稳定的振荡;- 振荡频率受到电阻、电容和电感等元件参数的影响;- 振幅稳定性随着电源电压的变化而变化,存在一定的稳定性范围。
5. 实验总结与思考通过本次实验,我深入了解了RLC振荡电路的原理和特性。
实验中,我掌握了搭建RLC振荡电路的方法和步骤,并学会了测量电路的频率响应和振幅稳定性。
同时,我也发现了一些问题,比如电路中元件的选择和调节对振荡特性的影响等。
RLC串联谐振电路的研究首先,我们来了解一下RLC串联谐振电路的基本结构。
它由一个电阻元件、一个电感元件和一个电容元件按照一定的顺序连接起来,形成一个串联电路。
电容元件和电感元件共同构成谐振回路,而电阻元件则起到了阻尼的作用。
在电路中施加一个外部交流电源,RLC串联谐振电路能够在特定的谐振频率下达到最大的电流响应。
接下来,我们研究RLC串联谐振电路的工作原理。
在谐振频率下,电阻、电感和电容元件可以形成一个频率选择性的共振回路。
此时,电感元件和电容元件的阻抗互相抵消,只有电阻元件阻抗起作用,整个电路呈现出纯电阻特性。
由于电阻元件的存在,电路中的电流受到了阻尼,不会无限增长。
因此,RLC串联谐振电路能够在谐振频率下对输入信号进行放大。
在研究RLC串联谐振电路时,我们首先需要分析电路的频率响应特性。
这可以通过计算电路的戴维南等效电路或者使用频率响应曲线图来完成。
在RLC电路中,频率响应的峰值对应着电路的谐振频率。
所以,通过分析RLC串联谐振电路的频率响应特性,我们可以得到电路谐振频率的大小和位置。
接下来,我们将研究RLC串联谐振电路的谐振频率和相位特性。
谐振频率是电路频率响应的峰值,它决定了电路的放大能力。
而电路的相位特性则是指输入信号和输出信号之间的相位关系。
在谐振频率下,输入信号和输出信号的相位差为0,也就是说它们完全处于同相位状态。
此外,我们还可以研究RLC串联谐振电路的幅频特性。
幅频特性通过分析电路的增益-频率曲线来研究电路对不同频率信号的响应能力。
在谐振频率下,电路的增益将达到最大值,也就是输出信号会得到最大的放大。
最后,我们可以研究RLC串联谐振电路的带宽和品质因数。
带宽是指电路在频率响应曲线上两个增益下降到峰值的一半所对应的频率差。
带宽越大意味着电路对频率信号的放大能力越强。
品质因数则是电路的品质衡量指标,它定义为谐振频率除以带宽。
品质因数越大,代表电路的频率选择性越好,也就是对输入信号的放大能力越强。
机械振动振动是一种特殊的震荡,即平衡位置附近微小或有限的振荡。
工程技术设计的机械和结构的振动称作机械振动。
按振动产生的原因分为:自由振动、强迫振动、自激振动。
自由振动是系统受初始干扰或原有外激励力取消后产生的振动。
强迫振动是系统在外激励力作用下产生的振动。
自激振动是在没有周期外力作用下.由系统内部激发及反馈的相互作用而产生的稳定的周期振动按结构参数的特性分为:线性振动、非线性振动。
线性振动是系统内的恢复力、阻尼力和惯性力分别与振动位移、速度和加速度成线性关系的一类振动,可用常系数线性微分方程来描述。
非线性振动式系统内上述参数有一组以上不成线性关系时的振动,此时微分方程中将出现非线性项。
按系统的自己度数分为:单自由度系统振动、多自由度系统振动、连续体振动。
单自由度系统振动是指只用一个独立坐标或能确定的系统振动。
多自由度系统振动是需要多个独立坐标才能确定的系统振动。
连续体振动即无限多自由度系统的振动,一般也称弹性体振动,需用偏微分方程来描述。
自由度数是完全描述系统的一切部位在任何顺时的位置所需要的独立坐标的个数按振动的规律分为:简谐振动、周期振动、瞬态振动、随机振动。
简谐振动是振动量为时间的正弦或余弦函数的一类周期振动。
周期振动是指振动量可表示为时间的周期函数的一大类振动,可用谐波分析法将其展开成一系列简谐振动的叠加。
瞬态振动是指振动量为时间的非周期函数,通常只在一定时间内存在。
随机振动是指振动量为时间的非确定性函数的一大类振动,只能用概率统计的方法进行研究。
按振动位移的特征分为:直线振动、圆振动。
直线振动的特征是振动体上质点的运动轨迹是直线,包括振动体上质点只沿轴线方向振动的纵向振动和振动体上做垂直于轴方向振动的横向振动(又称弯曲振动。
圆振动的特征是振动上质点的运动轨迹为圆弧线,对轴线而言,振动体上的质点只作绕轴线的振动,也称角振动或扭转振动。
机械系统之所以会产生振动是因为它本身具有惯性和弹性从能量的观点看,惯性是系统保持动能的特性,而弹性则是系统贮藏势能的特性。
实验十三 RLC串联谐振电路的研究RLC串联谐振电路是一种典型的三元交流电路,由电阻R,电感L和电容C组成。
它有着广泛的应用,在通信、电源供应和电动机控制等方面有着重要作用。
本实验通过实验和理论计算,在充分认识RLC串联谐振电路的基础上,深入了解它的特性和应用。
一、实验目的1. 理解RLC串联谐振电路的基本原理。
2. 实验测量RLC串联谐振电路的电压、电流、频率等数据,并绘制幅频特性曲线。
3. 探究RLC串联谐振电路的共振频率、谐振峰值等特性,并通过理论计算和实验对比验证共振频率公式的正确性。
二、实验仪器和材料1. 信号源(SFG-1003,三角波和正弦波)。
2. 示波器(DSO-X 2024A,波形存储/回放)。
3. 电阻、电感、电容器。
4. 构成RLC串联谐振电路的面包板、导线等实验器材。
三、实验原理RLC串联谐振电路是由电阻R、电感L和电容C组成的串联电路。
当交流电源加在串联电路上时,电阻、电感和电容的阻抗会同时发挥其功能,使电路中的电流和电压随时间发生变化。
当频率为一定值时,电路的阻抗最小,电流最大,电压最大,这时电路谐振,这个频率称为电路的共振频率。
此时电阻、电感和电容器分别发挥了其最佳功效,一起构成电路的谐振状态。
随着频率的变化,电容的阻抗值会增大,电感的阻抗值会减小,而电阻的阻抗值保持不变。
当频率小于或大于达到共振频率时,电路的阻抗逐渐增大,电流和电压减小。
(1) 谐振频率电路的共振频率又称为谐振频率,用f0表示。
当电路的电容和电感阻抗相等时,电流最大,电路的共振频率为:f0=1/2π√LCXL=ωL-1/ωCω为角频率,ω=2πf。
在共振频率处,电路的谐振电抗为0。
(3) 谐振品质因数电路的谐振品质因数Q是电容和电感的阻抗比,也是一个重要的评估电路性能的参数。
谐振品质因数是从谐振频率以上的频域下降到 3 dB 以下的频带宽与谐振频率之比的倒数,即:Q=f0/∆f其中∆f为频宽,是谐振点左右两侧,阻抗降低到谐振点一半时对应的频率差。
09010131王子超摘要:我们通常研究的振动是一种周期性的运动。
所谓周期性运动是指在时间上具有重复性或往复性的一种运动,是遍及自然界及社会科学界的一种运动方式。
在物理学中,广义地说,凡描述物质运动状态的物理量,在某一数值附近做周期性的变化,都叫做振动。
本文主要研究简谐振动以及振动的合成,振动的能量,并简要介绍共振及其应用。
关键字:振动周期性合成能量共振一.有关振动的概念及特点振动(又称振荡)是指一个状态改变的过程。
即物体的往复运动。
简谐振动:加速度a与位移的大小x成正比,而方向相反的振动。
简谐振动的特点:1。
有一个平衡位置(机械能耗尽之后,振子应该静止的唯一位置)。
2。
有一个大小和方向都作周期性变化的回复力的作用。
3。
频率单一、振幅不变。
振幅A:简谐运动物体离开平衡位置最大位移的绝对值A。
振动的周期T:物体做一次完全振动所经历的时间。
频率f:单位时间内物体所作的完全振动的次数。
圆频率ω:一秒钟对应的圆心角。
一次全振动对应的圆心角就是2π(即360度)。
相位:当振幅和频率一定时决定振动物体在任意时刻相对平衡位置的位移和速度的物理量。
广义的振动从广义上说振动是指描述系统状态的参量(如位移、电压)在其基准值上下交替变化的过程。
狭义的指机械振动,即力学系统中的振动。
电磁振动习惯上称为振荡。
力学系统能维持振动,必须具有弹性和惯性。
由于弹性,系统偏离其平衡位置时,会产生回复力,促使系统返回原来位置;由于惯性,系统在返回平衡位置的过程中积累了动能,从而使系统越过平衡位置向另一侧运动。
正是由于弹性和惯性的相互影响,才造成系统的振动。
按系统运动自由度分,有单自由度系统振动(如钟摆的振动)和多自由度系统振动。
有限多自由度系统与离散系统相对应,其振动由常微分方程描述;无限多自由度系统与连续系统(如杆、梁、板、壳等)相对应,其振动由偏微分方程描述。
方程中不显含时间的系统称自治系统;显含时间的称非自治系统。
按系统受力情况分,有自由振动、衰减振动和受迫振动。
机械振动引言:从控制振源、隔振措施等方面论述了工程机械发动机的减振技术,提出了由被动减振到主动减搬起石头砸自己的脚的基本思路,指出了工程机械减振的可行方法,以及今后的研究方向和可能的发展。
(一)基本方法从控制振源、隔振措施等方面论述了工程机械发动机的减振技术,提出了由被动减振到主动减搬起石头砸自己的脚的基本思路,指出了工程机械减振的可行方法,以及今后的研究方向和可能的发展。
振动和噪声是工程机械工作时的两大公害。
发动机是工程机械主要振动源。
发动机振动的传播直接影响到工程机械的整机可靠性和使用寿命,同时也使司机的乘坐舒适性变差,降低工作效率。
必须采用一些有效方法来减少振动。
一般评估电动机的品质除了运转时之各特性外,以人之五感判断电机振动及电机振动噪音的情形较多。
而电动机产生的电机振动电机振动噪音,主要有:1、机械电机振动电机振动噪音,为转子的不平衡重量,产生相当转数的电机振动。
2、电动机轴承的转动,正常的情形产生自然音,精密小型电动机或高速电动机情形以外,几乎不会有问题。
但轴承自然的电机振动与电动机构成部材料的共振,轴承的轴方向弹簧常数使转子的轴方向电机振动,润滑不良产生摩擦音等问题产生。
3、电刷滑动,具有电刷的DC电动机或整流子电动机,会产生电刷的电机振动噪音。
4、流体电机振动噪音,风扇或转子引起通风电机振动噪音对电动机很难避免,很多情形左右电动机整体的电机振动噪音,除风扇的叶片或铁心的齿引起气笛音外,也有必要注意通风上的共鸣。
5、电磁的电机振动噪音,为磁路的不平衡或不平衡磁力及气隙的电磁力波产生之电机振动噪音,又磁通密度饱和或气隙偏心引起磁的电机振动噪音。
一、机械性电机振动的产生原因与对策(二)主要措施1 振源控制振源控制贯穿于设计,制造乃至使用的全过程,体现在诸如改善发动机平衡性能、动力学性能、零部件的加工与装配精度等。
发动机在工作中产生振动的形式是多样的,主要原因有:发动朵重心周期性移动,往复运动件沿气缸上下作用的惯性力,所有旋转运动件的离心惯性力,气体压力交替作用引起曲轴回转周期变化等。
RLC 串联电路与机械振动的类比分析摘 要:我们对RLC 串联电路与弹簧振子进行较全面地类比分析,两系统的结构参数、描述方程、储存能量等方面均极其相似。
现从RLC 电路和弹簧振子的类比分析出发,较全面地导出两系统的所有对应关系。
据此用电路的Multisim 仿真分析求解电学与力学振荡系统。
关键词:RLC 电路 弹簧振子 振荡频率 阻尼振动 共振The analog of RLC series circuit and Mechanical vibrationAbstract :Study RLC series circuit and the spring oscillator in a comprehensive analysis of, the structural parameters , describing equations and stored energy of the two systems are very similar. Based on the analog of RLC circuit and the spring oscillator , I derived a more comprehensive conclusion of the two systems. By means of Multisim circuit simulation I analyzed the electrical and mechanical oscillation systems.Keywords: RLC circuit, Spring oscillator, Oscillation frequency, Damped vibration ,Resonance一. 引言通过物理实验5.6.3及大学物理课程,我们可以知道RLC 电路是以电感L 和电容C 组成的电路系统,当我们在分析它的电路特性时,往往会遇到一些困难。
rlc电路研究实验报告RLC电路研究实验报告引言RLC电路是电工学中的一个重要概念,也是电子工程师必须掌握的基础知识之一。
本实验旨在通过实际操作和测量,研究RLC电路的性质和特点,进一步加深对电路理论的理解。
实验目的本次实验的主要目的是研究RLC电路的频率响应、幅频特性和相频特性,以及对电路中的电压、电流等参数进行测量和分析。
实验原理RLC电路由电阻(R)、电感(L)和电容(C)组成,是一种具有阻抗特性的电路。
在交流电路中,电压和电流的变化是周期性的,因此我们需要研究电路在不同频率下的响应。
频率响应是指电路中电压和电流随频率变化的情况。
在RLC电路中,当频率很低时,电容和电感的作用相对较小,电路的阻抗主要由电阻决定。
而当频率很高时,电容和电感的作用逐渐显现,电路的阻抗会发生变化。
幅频特性是指电路中电压和电流的幅值随频率变化的情况。
在RLC电路中,当频率很低或很高时,电路中的电压和电流的幅值会受到电阻、电感和电容的影响,呈现出不同的变化规律。
相频特性是指电路中电压和电流的相位随频率变化的情况。
在RLC电路中,当频率很低或很高时,电路中的电压和电流的相位会受到电阻、电感和电容的影响,呈现出不同的变化规律。
实验步骤1. 准备实验所需材料和仪器,包括电源、电阻、电感、电容、示波器等。
2. 搭建RLC串联电路,注意连接正确。
3. 将示波器连接到电路中,调整示波器的参数,使其能够准确显示电路中的电压和电流。
4. 通过改变电源的频率,测量电路中电压和电流的数值。
5. 记录实验数据,并进行分析和比较。
实验结果与分析通过实验测量得到的数据,我们可以绘制出RLC电路的频率响应曲线、幅频特性曲线和相频特性曲线。
通过分析这些曲线,我们可以得到以下结论:1. 频率响应曲线显示出电路在不同频率下的阻抗变化情况。
当频率较低时,电路的阻抗主要由电阻决定,随着频率的增加,电感和电容的作用逐渐显现,电路的阻抗发生变化。
2. 幅频特性曲线显示出电路中电压和电流的幅值随频率变化的情况。
RLC串联谐振与力学振动相似的研究在一些电学系统与力学系统之中,尽管现象发生的物理过程不同,但它们遵从的运动规律是相同的,可以将它们进行某种类比。
标签:串联谐振;幅频特性;相频特性;波尔共振;能量转化;模拟1 RLC电路特性当电容C、电感L两类元件同时出现在一个电路中时,就会发生一种新现象——谐振。
图1所示,是一个RLC串联谐振电路,将它接在频率可调的音频信号源上,电阻R上的电压UR与回路中的电流I成比例。
闭合开关K,若维持信号源的电压US不变(即回路电压不变),从低到高顺序改变信号源的频率f,观察R上的电压幅度UR(正比于回路中电流I的幅度)随信号频率的变化,如图2曲线(1)。
该图的横坐标用的是相对坐标,使图线更有普遍性。
回路电流I的极大值出现在信号源频率f=f0,f0是该电路的谐振频率,它由电路的参数决定。
在RLC串联谐振电路中发生电流谐振,I~f/f0曲线称为谐振电路的幅频特性。
[图1 RLC谐振电路][图2 幅频特性]如果打开K,使回路电阻增加R1,而其他条件都不变。
流过R的电流如图2曲线(2)。
与曲线(1)相比,其幅度下降,曲线较平坦,极值点略向低频移动。
把UR输入双踪示波器一端,信号源电压US输入另一端,改变信号源频率f,用“双踪”观察比较回路电流与电压这两個波形。
在f=f0时,I的幅度最大,I 与US相位相同,此时电路呈纯电阻性,且阻值最小。
在ff0时,I的幅度也较小,I落后于US,说明回路的阻抗也较大,但呈电感性。
信号源电压US与回路电流I的相位差φ随f变化的特性,称为谐振电路的相频特性。
综上所述,串联谐振电路的输入信号频率f由低于电路谐振频率f0向高于f0变化的过程中,其相频特性如图3所示。
[图3 相频特性]2 两种现象的比较不难发现,串联谐振电路与波尔共振仪有相同的幅频、相频特性,这是巧合吗?由谐振回路中各元件上的电压关系,容易建立描写谐振过程的微分方程(1)将(1)式改写(2)令(3)则(2)式变为(4)此即为回路中电荷运动所满足的微分方程,谐振频率,它由电路的电感、电容决定,是电路的固有特性。
rlc动态电路的研究实验报告一、引言RLC电路是一种基本的动态电路,广泛应用于各种电子设备中。
在本次实验中,我们将对RLC动态电路进行研究,探究其特性及其对电流和电压的影响。
二、实验原理1. RLC电路的结构与特性RLC电路由电阻、电感和电容器组成,其特性取决于三个元件的参数和连接方式。
当交流信号通过RLC电路时,会产生不同的响应,包括阻尼振荡、共振等。
2. 串联RLC电路的分析串联RLC电路是指将三个元件按顺序连接起来,并接入交流信号源。
在此情况下,可以通过计算得出整个电路的阻抗,并进一步计算出各元件上的电压和通过整个电路中的总电流。
3. 并联RLC电路的分析并联RLC电路是指将三个元件并联起来,并接入交流信号源。
在此情况下,可以通过计算得出整个电路的导纳,并进一步计算出各元件上的流经它们的分支流以及整个并联回路中总流量。
三、实验步骤1. 实验器材准备:函数发生器、示波器、电阻箱、电容箱、电感箱和万用表等。
2. 串联RLC电路的实验步骤:(1)将三个元件按顺序连接起来,并接入交流信号源。
(2)调整函数发生器产生的正弦波频率,分别记录下电容器上的电压和整个电路中的总电流。
(3)更改各元件的参数,重复步骤2,得到不同参数下的数据。
3. 并联RLC电路的实验步骤:(1)将三个元件并联起来,并接入交流信号源。
(2)调整函数发生器产生的正弦波频率,分别记录下各元件上的流经它们的分支流以及整个并联回路中总流量。
(3)更改各元件的参数,重复步骤2,得到不同参数下的数据。
四、实验结果与分析1. 串联RLC电路实验结果通过计算得出不同参数下整个串联RLC电路中总阻抗,并绘制出其随频率变化时的曲线。
同时,还可以计算出各元件上所承受的电压大小及其相位差。
在此基础上,我们可以进一步探究阻尼振荡和共振现象。
2. 并联RLC电路实验结果通过计算得出不同参数下整个并联RLC电路中总导纳,并绘制出其随频率变化时的曲线。
同时,还可以计算出各元件上所承受的分支流大小及其相位差。
实验十三 RLC电路谐振特性的研究【实验目的】1、观察RLC 电路的串联谐振和并联谐振的现象。
2、测绘RL C电路的串联和并联谐振曲线。
3、了解Q值的物理意义及测定方法。
【仪器用具】信号发生器一台、示波器一台、晶体管毫伏表一台、电阻箱一只、标准电容箱一只、标准电感一只、导线若干. 【实验原理】谐振现象在无线电技术中应用广泛,例如:广播电台以不同频率电磁波向空间发射电信号,收音机就是利用谐振电路把所需要的信号挑选出来的。
一、RL C串联谐振将电阻R、自感L 和电容C 串联后加上交变电压如图所示:图13—1 RLC 串联电路我们知道,在交变电路中,电容C和电感L两端的阻抗与电压的园频率有关,设A、B 两端的总阻抗为Z ,则22)1(CL R z ωω-+=(13—1)其交流电压与交流I (均为有效值)的关系为22)1(CL R U ZU I ωω-+==(13—2)如图13-2是电压与电流的矢量图,图13—2 串联谐振电压电路矢量图由图可知,纯电阻R 两端的流过它的电流同相位,纯电阻R 两端的电压与流过它的电流有一个90°的位相差,且电压落后于电流;纯电感两端的电压与流过它的电流也有一个90°的位相差,且电压超前于电流。
总电压与电流的位相差为ϕ,由图可得:RC L tg U U U tg RCL ωωϕ111-=-=-- ( 13—3)由式(13—1)和(13—3)可见,Z和ϕ都是ω(即2πf)的函数,由式(13-2)可知,当总电压U 保持不变时,总电流I 也是ω(即2πf)的函数,若以f 为横坐标,I 为纵坐标,则可画出电流的频率特性曲线(也称电路的幅频特性),如图13-3所示.图13—2串联谐振曲线由图中曲线及前面三公式可知,当ω=ω0满足关系式:0100=-CL ωω( 13-4)时,ϕ=0,即总电压与电流同位相,此时电路的总阻抗有一极小值,且Zmin=R;而电流有一极大值,I max=RU,这种现象称为谐振现象。
机械振动与RLC电路对比xxx(东南大学生物科学与医学工程学院,南京,211189 )摘要:本文主要从三个反面探究了机械振动与RCL电路的相似性,分别是:1、最简单的机械振动与电磁振荡;2、有阻尼的机械振动与电磁振荡;三、受迫振动与含电源的RCL电路。
关键词:机械振动,RCL电路,对比物理体系是一个充满统一规律的体系,在物理课程的学习中,发现机械振动与电磁振荡虽然在性质上有本质的不同,但还是有很多可以对偶的方面,本文将在多种情况分析讨论机械振动与电磁振荡的相似之处。
一、最简单的机械振动与电磁振荡1.1弹簧振子的简谐运动图一是最简单、最典型的机械振动示意图,设定弹簧形变最大为Xm处于平衡位置右侧,系统无能量损失。
图一最简单的机械振动作者简介:作者简介:xxx,xxxx年,女,生物科学与医学工程学院,本科生其中涉及到的物理量:弹簧弹力:f弹质点运动速度:v质量:m倔强系数倒数:1/k角频率:ω涉及到的物理关系:胡克定律:dtdfkv弹1=牛顿第二定律:dtdvmfm=弹性势能:()弹fkkxkkxEp1211212122===动能:221mvEk=角频率:mkw=1.2最简单的RCL电路图二是最简单、最典型的电磁振荡电路,设定C充满电,电压为u c,系统无能量损失。
图二 最简单的RCL 电路其中涉及到的物理量: 电容电压:u c 电流:i 电感:L 电容:C涉及到的物理关系: 电容元件伏安关系: dtdu Ci c= 电感元件伏安关系: dtdi L u L = 电容储存的能量: 221c c Cu W =电感储存的能量: 221L L Li W =振荡频率:LCw 1=1.3 对比分析不难发现,上述两种物理过程中涉及到的物理量有如下对应关系:弹簧弹力:f ----弹电容电压:u c 质点运动速度:v ----电流:i 质量:m ----电感:L 倔强系数倒数:1/k---电容:C 角频率 ---振荡频率同时物理关系也有类似的对应关系,在此不再赘述。
二、有阻尼的机械振动与电磁振荡在这一部分,将会在最简单的机械振动和电磁振荡上,加上阻尼部分进行研究。
2.1 弹簧振子的简谐运动图三 含有阻尼的机械振动受到的阻尼均为流体阻尼,设阻尼系数为k ,暂且用c 表示弹力系数。
以平衡位置为原点,右侧为正方向建立坐标系。
令t 时刻时小球横坐标为x ,则:物块在水平方向上受两个力:F 弹=-cx ,F 阻=-kv 合力:F=-kv-cx 由牛顿第二定律:F=ma 则: ma=-kv-cx ma+kv+cx=0根据加速度a 、速度v 的定义,有 m*d 2x/dt 2+k*dx/dt+cx=0是二阶线性常系数齐次微分方程,用特征方程法解。
其特征方程为: mr 2+kr+c=0 解得:r 1=(k 2-4mc)1/2/2m-k/2m,r 2=-(k 2-4mc)1/2/2m-k/2m 现在要根据特征方程Δ的取值来确认解的情况。
情况一:Δ>0(即k 2>4mc ) 则微分方程通解为 x=C 1e[(k^2-4mc)^(1/2)/2m-k/2m]t+C 2e[-(k^2-4mc)^(1/2)/2m-k/2m]tLCx=C 1e([k^2-4mc)^(1/2)/2m]t*e-kt/2m+C 2e[-(k^2-4mc)^(1/2)/2m]t*e-kt/2mx=[C 1e(k^2-4mc)^(1/2)t/2m+C 2e-(k^2-4mc)^(1/2)t/2m]*e-kt/2m当t=0时,x=x 0,v=v 0得:x=[x 0+(kx 0+2mv 0)/(k 2-4mc)1/2]sinh[(k 2-4mc)1/2t/2m ]*e-kt/2m+x 0e[-(k^2-4mc)^(1/2)-k]*t/2m情况二:Δ=0(即k 2=4mc ) 此时特征方程解为: r 1=r 2=-k/2m 则微分方程通解为 x=(C 1t+C 2)e-kt/2m当t=0时,x=x 0,v=v 0,得 x=(v 0t+kx 0t/2m+x 0)e-kt/2m情况三:Δ<0(即k 2<4mc ) 此时特征方程的解变为:r 1=i(4mc-k 2)1/2/2m-k/2m,r 2=-i(4mc-k 2)1/2/2m-k/2m 则微分方程通解为:x={C 1sin[(4mc-k 2)1/2t/2m]+C 2cos[(4mc-k 2)1/2t/2m]}e -kt/2m 当t=0时,x=x 0,v=v 0得x={(2mv 0+kx 0)/(4mc-k 2)1/2*sin[(4mc-k 2)1/2t/2m]+x 0cos[(4mc-k 2)1/2t/2m]}e -kt/2m至此得到不同情况下x 对t 的函数关系式如下: 当k 2>4mc 时,x=[x 0+(kx 0+2mv 0)/(k 2-4mc)1/2]sinh[(k 2-4mc)1/2t/2m ]*e -kt/2m +x 0e [-(k^2-4mc)^(1/2)-k]*t/2m 当k 2=4mc 时,x=(v 0t+kx 0t/2m+x 0)e-kt/2m当k 2<4mc 时,x={(2mv 0+kx 0)/(4mc-k 2)1/2*sin[(4mc-k 2)1/2t/2m]+x 0cos[(4mc-k 2)1/2t/2m]}e -kt/2m三种阻尼的情况分别称为过阻尼、临界阻尼、欠阻尼。
图四 有阻尼的机械振动x--t 图像2.2含电阻的RCL 电路图二是含电阻的RCL 电路,设定t=0时电容充满电。
图五 含有电阻的的电磁振荡电路定义电路阻尼:=LCR 42现对各种振荡情况初步分析: 基尔霍夫定律:u R +u C +u L =0 欧姆定律:u R =Ri电感上电压、电流间的微分关系:u L =L ×di/dt 于是i=C ×d(-Ri-L ×di/dt)/dti=C ×[-d(Ri)-d(L ×di/dt)]/dt i=C ×(-R ×di-L ×d 2i/dt)/dt i=-RC ×di/dt-LC ×d 2i/dt 2LC ×d 2i/dt 2+RC ×di/dt+i=0 是一个二阶线性常系数齐次微分方程i 对t 的二阶导数前系数为LC ;其一阶导数前系数为RC ;i 前系数为1。
x临界阻尼则特征方程为 LCx 2+RCx+1=0x=[-RC±(R 2C 2-4LC)1/2]/2LCx 1=[(R 2C 2-4LC)1/2-RC]/2LC,x 2=-[(R 2C 2-4LC)1/2+RC]/2LC根据特征方程法,下面要判断特征方程Δ的取值来确认通解的情况。
情况一:Δ>0(λ>1) 则微分方程通解为:(注:为避免与电容符号混淆,积分变量一律用A 、B 表示) i=Ae [(R^2*C^2-4LC)^(1/2)-RC]t/2LC+Be-[(R^2*C^2-4LC)^(1/2)+RC]t/2LCi=Ae (R^2*C^2-4LC)^(1/2)*t/2LC-Rt/2L +Be-(R^2*C^2-4LC)^(1/2)*t/2LC-Rt/2Li=Ae(R^2*C^2-4LC)^(1/2)*t/2LC*e-Rt/2L+Be -(R^2*C^2-4LC)^(1/2)*t/2LC*e-Rt/2Li=[Ae (R^2*C^2-4LC)^(1/2)*t/2LC+Be-(R^2*C^2-4LC)^(1/2)*t/2LC]*e-Rt/2L当t=0时,因电感上电流不突变,所以i=0, 则u R =Ri=0又因为电容上电压不突变,所以u C =-U 0 得i=2Asinh[(R 2C 2-4LC)1/2t/2LC]e-Rt/2Li=2U 0[C/(R 2C-4L)]1/2sinh[(R 2C 2-4LC)1/2t/2LC]e-Rt/2Li=2U 0[1/(R 2-4L/C)]1/2sinh[(R 2C 2-4LC)1/2t/2L(C 2)1/2]e -Rt/2L i=2U 0sinh[(R 2-4L/C)1/2t/2L]e -Rt/2L/(R 2-4L/C)1/2情况二:Δ=0(λ=1)此时特征方程有一二重根:x 1=x 2=-R/2L 则微分方程通解为 i=(At+B)e-Rt/2L当t=0时,已证i=0,则 i=U 0te-Rt/2L/L情况三:Δ<0(即R 2<4L/C )此时特征方程解为:x 1=(4LC-R 2C 2)1/2j/2LC-R/2L,x 2=-(4LC-R 2C 2)1/2j/2LC -R/2L当t=0时,已证i=0,di/dt=U 0/L:i=2U 0sin[(4L/C-R 2)1/2t/2L]e-Rt/2L/(4L/C-R 2)1/2( 1 )当 时,电路的固有频率是两个不相等的负实数,响应是非振荡性的,称为过阻尼情况。
( 2)当 时, 电路的固有频率是两个相等的负实数,响应处于临界状态,称为临界阻尼情况。
( 3 )当,时,电路的固有频率是共轭复数,响应将形成衰减振荡,称为欠阻尼情况。
图六 有阻尼的RCL 电路u--t 图像2.3对比分析从三种阻尼情况的判别条件来看:R 2<、>、=4L/C 与k 2<、>、=4mc ,可以看出,除了在第一部分已经讨论过的质量:m ----电感:L倔强系数倒数:1/c---电容:C (注:这里用小写c 表示了倔强系数) 的对应关系之外,电阻R---阻尼系数k 也具有对应关系。
此外,无论是在推导过程,结论还是关系图上,含有阻尼的机械振动和RCL 电路都是一致的。
临界阻尼三、受迫振动与含电源的RCL电路这里不再进行数学计算,而是通过两种振动的幅频、相频曲线,来形象地体现二者的统一性。
表一受迫振动与含电源的RCL电路幅频相频图像对比不难看出,两者之间的高度一致性。
四、结论根据以上分析,我们可以得出,机械振动和RCL 电路具有很好的对偶性,可以为我们在处理相关问题的时候提供指导,也说明了物理体系的统一性。
参考文献:[1]东南大学等七所工科院校编,马文蔚等改编,《物理学》,高等教育出版社,2006[2]邱关源著罗先觉修订《电路》. 高等教育出版社.第五版幅频特性曲线相频特性曲线机械受迫振动RCL电路。