机械创新设计大赛作品说明书
- 格式:doc
- 大小:404.50 KB
- 文档页数:4
第六届全国大学生机械创新设计大赛参赛作品折叠式科氏惯量仪设计说明书设计人员:张鹏张一超张作斌路旭蒋博文指导教师:王平凯马海涛参加单位:长春工业大学2014年5科氏惯量仪设计者:张鹏,张一超,张作斌,路旭,蒋博文指导教师:王平凯,马海涛(长春工业大学机电工程学院)摘要:大学课程中有很多课程的相关的原理需要相应的实验才能做到深层的理解,比如说科氏加速度实验。
而如今的实验仪器存在以下几点不足:1.实验仪器体积较大,不能让实验达到人手一台。
2.实验仪器造价昂贵,从而使多数学校不能大数目引进。
3.实验仪器不易移动,教师不能随意将仪器带到教室及其他地方。
4.实验仪器造型单调,没有趣味性,实验现象不能给同学们留下很深刻的印象。
针对这一问题,研究小组做了充足的研究和调查,设计并制作了这一台折叠式科式惯量仪,希望借此解决以上问题,我们设计的设备有以下优点:1.实验仪器体积浓缩且重量适中,可以轻易移动。
2.实验仪器造价低廉,每台造价2000~3000甚至能更低,这样就可以使学校增加配备量,保证每位同学都能操作一台。
3.实验仪器操作简单方便,而且安全性更高。
4.实验仪器可以装箱带走,使老师可以轻易带到教室及其他地方。
5.实验仪器综合性高,它既能科氏加速度和转动惯量以及摩擦力矩实验。
6.实验仪器设计为透明主体,实验现象符合梦幻这一主题,吸引学生们的热情。
因此,我们设计的便携式设备一方面能很好地适应日常教学的要求,另一方面,又能使同学们通过实验过程了解理论力学等相关知识,很好的提高学生们的学习热情,给理论力学课程增加了一个好帮手。
关键词:科氏力,惯量,可折叠,新颖一、引言一节实验课可以通过实验过程吸引每个学生的兴趣,提高他们的学习热情,学生上的每一节实验都与一周或是一个月所学的知识有着紧密的联系,它既是一种实践又是一次复习,帮助同学们加深对课堂知识的理解。
二、产品功能及结构(一)产品功能:①科氏力的测量;②科氏加速度的计算;③转动惯量的测量;④试件的摩擦力矩的计算;⑤电路控制的编程教学;(二)产品结构:箱体支架、动力源、传动机构、动作机构、装夹机构、电子测量机构、控制机构、安全机构。

机械创新设计说明书精选文档TTMS system office room 【TTMS16H-TTMS2A-TTMS8Q8-目录一、设计任务书§设计背景§基本目的§设计要求二、设计方案及方案的对比和确定§方案一§方案二§方案的对比和确定三、设计方案分析§机构运动说明§机构效果简图§机构零件规格§机构运动简图§运动计算分析四、心得体会五、参考文献一、设计任务书§设计背景传统晾衣架的基本构架一般是一根竹竿固定或悬挂在屋顶板下、窗外等地方;现在大多是在天花板下焊接一根铁管作为晾衣架的挂具,人们晾衣服时,需要用一根叉子将衣服一件一件地挂在铁杆上,费时又费力,而且一旦操作不当便会将衣服掉在地上弄脏,非常不方便,并且还不能够充分地利用阳光。
针对这些问题,我设计了一种实用的半自动晾衣架,来满足人们在自动升降、伸缩两方面的需求,希望能给家庭主妇们带来便利。
§基本目的1)使学生初步了解机械设计的全过程,得到根据功能需要拟定机械运动方案的训练,初步具备的机构选型、组合和确定运动方案的能力;2)以机械系统运动方案设计为切入点,把机械原理课程各章的理论和方法融会贯通起来,进一步巩固和加深所学的理论知识;3)使学生掌握机械运动方案设计的内容,方法,步骤,并对动力分析与设计有一个较完整的概念;4)进一步提高学生运算,绘图以及运用计算机和技术资料的能力;5)通过编写说明书,培养学生表达,归纳,总结的能力;6)培养学生综合运用所学知识,理论联系实际,独立思考与分析问题的能力和创新能力。
§设计要求1)晾衣架能自动升降以缓解举手晾衣的麻烦;2)晾衣架能自动伸出和缩回,既充分利用了阳光,减少事故隐患,又不影响整个小区的总体美观;3)有足够的承载能力;4)操作方便,节时省力。
二、设计方案及方案的对比和确定§方案一图示为半自动晾衣架的侧视图(1)机构的组成1为楼上阳台,2是导轨,3是滑轮,4滑块,5为手动平行四边式机构,6是晾衣杆,7和8为滑轮,9是让滑块前移的绳索,10是让滑块后移的绳索,11为机构5的拉杆。
机械创新设计⼤赛作品设计说明书格式第三届全国⼤学⽣机械创新设计⼤赛决赛参赛作品设计说明书格式要求说明1.总体要求全⽂控制在8~15页以内,并按以下顺序编排:作品名+“设计说明书”、设计者、指导教师、学校名+院系名+学校所在城市+邮编、摘要、关键词、正⽂[可⾃⾏组织,但应包括下列内容:作品背景(国内外相关研究现状)、设计制作中解决的关键技术问题的描述、作品实物或实物模型的照⽚、创新特⾊、预计应⽤前景等]、参考⽂献。
可不加封⾯。
采⽤word 2003版本编排。
2.页⾯要求A4页⾯。
页边距:上25mm,下25mm,左、右各20mm。
标准字间距,单倍⾏间距。
不要设置页眉,页码位于页⾯底部居中。
3.图表要求插图按序编号,并加图名(位于图下⽅),采⽤嵌⼊型版式。
图中⽂字⽤⼩五号宋体,符号⽤⼩五号Times New Roman(⽮量、矩阵⽤⿊斜体);坐标图的横纵坐标应标注对应量的名称和符号/单位。
表格按序编号,并加表题(位于表上⽅)。
采⽤三线表,必要时可加辅助线。
4.字号、字体要求油罐车注油⾃动控制系统设计说明书[r1]设计者:×××,×××,×××,×××,×××[r2]指导教师:×××,×××[r3](XX⼤学机电学院,西安710056)[r4](空⼀⾏)[url=]作品内容简介[/url][I5]通过实验设计了⼀套⾃动加油系统……(400—600字以内)。
联系⼈、联系电话、EMAIL(空⼀⾏)1 研制背景及意义在新疆塔⾥⽊⽯油基地,⽬前从油井打出的原油储存到储油罐后,从储油罐向油罐车注油时,⼀个⼈需站在油罐车上注油⼝旁观察油罐是否加满,⽽另⼀个⼈关闭阀门。
因在原油内含有⼤量的有毒⽓体(硫化氢),从安全⾓度考虑站在油罐车上的⼈必须戴上防毒⾯具……2设计⽅案[r6]2.1 电磁控制⽤电磁控制⽐较容易实现,但是因为防⽕、防暴的原因,加油区不得⽤电,⽆法⽤电磁控制…………2.2 ⽓动控制⽤⽓动控制,⽓源的空⽓压缩机也要⽤电,但可以将空⽓压缩机放置在远离加油区的位置。
多功能家具一体机设计者:李静,张宇,王奕钦,黄杰,陶旭指导教师:***齐齐哈尔大学2012年4月多功能家具一体机设计者:李静,张宇,王奕钦,黄杰,陶旭指导教师:王世刚(齐齐哈尔大学机电工程学院,齐齐哈尔161006)摘要:随着时代的发展,小居室越来越多的成为了当代家庭的选择,相比与大居室,小居室的空间布局成为了一个难题,本着节省空间,合理布局的意图,研发了此多功能家具一体机。
集桌椅,书架,衣柜,床为一体,充分节约了居室空间,美化了家庭布局,简约而不见简单。
关键词:家具;组合;多功能;省空间作品内容简介本作品跟据本届机械创新设计大赛的主旨要求而设计,属于“家庭用机械”。
此机械以角铁和木板为支撑结构,高1m,宽80cm厚30cm。
机器一面利用弹簧合页拉开可组成一套桌椅。
另一面为书架,手机客户端用wifi或直接触控机器侧身电子屏幕可执行床的展开操作。
展开床长为90cm 宽为90cm.展开后机器内部空间变为橱衣柜。
机器顶部配有摄像头可对居室进行监视,保护屋内的安全。
联系人:联系电话:EMAIL:1 研制背景及意义随着国家的的发展和当前社会大背景,住房问题越来越多的成为了人民关注的焦点。
各地的房价都在持续上涨,对于当代家庭来说,小居室受到了众多人的青睐,但麻雀虽小,如何能够五脏俱全,这是一个非常令人头疼的问题,同一个家具,大居室摆放的就能相当协调,而小居室就会稍显拥挤,拥挤的空间会减少居室采光,影响人们的视觉审美,难以创造更高品质的家庭生活。
对于诸多问题我们提出如下解决思路:1)家具的摆放应具有灵活性;2)在不影响性能的前提下,家具的体积应尽可能的小;3)家具应具有更多的功能。
此多功能家具一体机旨在对对家庭内物品进行整理、储存和用机械。
它未展开态时是一个箱体,占用0.24㎡面积。
而且机械底部装有万向轮,能做到想放哪里放哪里。
一旦选定位置,可用脚踩下轮锁进行固定。
本机械分为4个功能部分,需要桌椅时,可拉开机器一侧由弹簧合页组组成的机构,即变为一套桌椅。
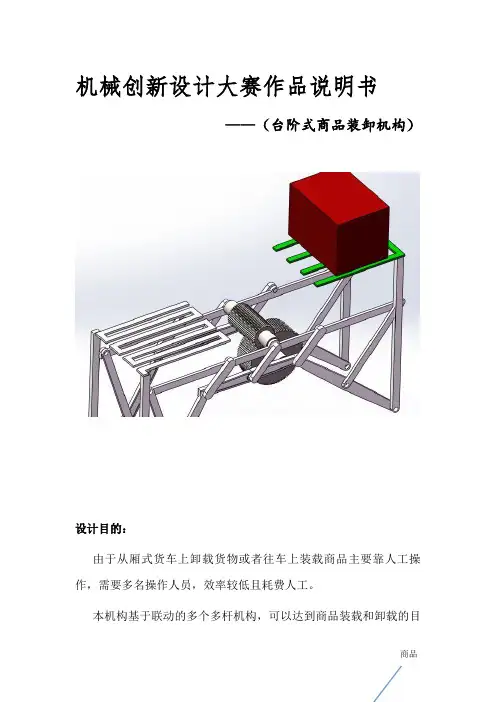
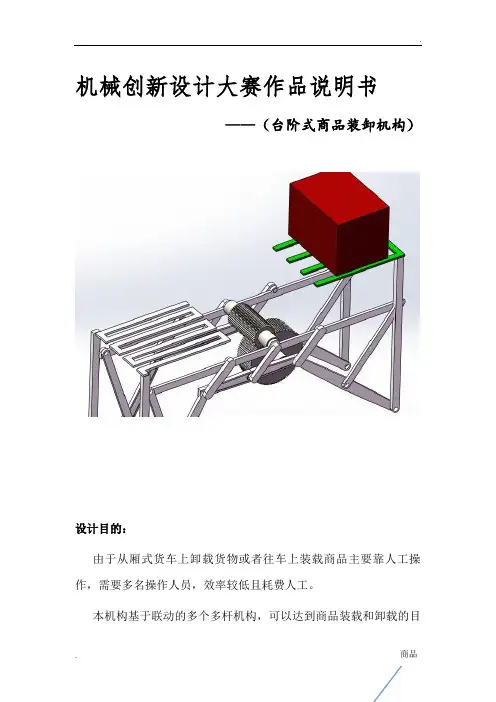
机械创新设计大赛作品说明书
——(台阶式商品装卸机构)
设计目的:
由于从厢式货车上卸载货物或者往车上装载商品主要靠人工操作,需要多名操作人员,效率较低且耗费人工。
本机构基于联动的多个多杆机构,可以达到商品装载和卸载的目
商品
的。
载物叉1
载物叉2
图1.-1
如图1-1,载物叉1处于高位,车上人员将货物搬运到载物叉1上。
多杆机构简图如1-2所示:
图1-2
图中,多杆机构结构类似于契贝谢夫行走机器人结构,我们将这个机构倒过来使用,通过两连杆伸长端的运动规律使两载物叉产生水平和竖直方向的相对位移,正转时能将商品由高到低卸载,反转时可将低处商品运往高处。
图1-3
两叉在等高处进行载荷的接替
图1-4
完成接替,在下方安装相似结构,通过皮带传动联动,可使货物达到台阶式下降的效果。
运送至最下一级的载物叉后,由卸载装置将货物倒出,运动简图如图: 载物叉1 下一阶段机构的载物叉
载物叉2
图1-5
通过如图多杆机构使货物倾斜一定角度依靠重力滑下,载物台归位过程中凸轮推动推杆将货物推开为下一件货物挪出位置。
优势:
相对于传送带机构,因为每一级都是水平抬放,无需考虑物品的摩擦 货物
推杆 载物叉。
第四届全国大学生机械创新设计大赛决赛参赛作品多功能救灾背包设计说明书设计者:杨凯,徐超,张恩,吴刚亮,杨飞指导教师:朱育权,万宏强西安工业大学机电学院2010年10月多功能救灾背包设计者:杨凯,徐超,张恩,吴刚亮,杨飞指导教师:朱育权,万宏强(西安工业大学机电工程学院,西安710032)摘要:以便捷、实用、高效的解决救灾过程中的运输、医疗救治、住宿、饮食问题的设备为研究对象。
提出了一种可分离的四折叠框架结构,再巧妙地配以折叠帆布和帐篷,便制成了一种可运输物资又可变为担架、帐篷的背包。
实验结果表明,该设备工作稳定,性能可靠,功能实现效果良好。
关键词:背包;担架;帐篷;多功能;救援避难作品内容简介本作品跟据本届机械创新设计大赛的主旨要求而设计,属于“救援、避难类机械”。
此背包主体为金属框架结构,宽50cm,厚30cm,高70cm,净重8kg。
背包状态可用来运送物资。
卸下物品后开启侧连接机构,展开背包变为担架,担架长200cm,宽50cm。
翻转担架并开启开合装置,揭开粘扣,向两侧拉开担架,拉出帐篷与担架布面结合,再由折叠杆撑起即变为帐篷,底面边长2m×1.8m,高145cm,可容纳三人居住。
此背包设计容量90L,内装供三人三天使用的食物,饮用水及药品。
再放入轻薄的防潮垫和三个睡袋以结合帐篷使用。
这样每个背包就可解决三个人灾后三天内的基本生存问题,还可用担架将受伤严重的人抬出至附近的基站救治。
联系人:万宏强联系电话:EMAIL:1 研制背景及意义在像玉树地震、舟曲泥石流等这类自然灾害发生时,由于道路损毁、大型救援设备数量不足,都会造成很多民众被困重灾区。
短期内面临没有食物、饮用水、药品以及住所等问题。
没有大型设备的帮助,到达灾区外围的士兵往往没有高效的救援方法,而是以人力一次又一次的向灾区运送单一物资,很难满足灾民短期生存的多种需求。
对于这类自然灾害救援过程中存在的问题我们应当考虑如下几点:1)运送的物资应当具有集成性,以便于之前的统一生产、调配与运输;2)送入灾区的设备应当尽可能多的解决灾民所面临的各种基本困难,如温饱、住宿以及医疗救治问题;3)送入灾区的设备除了消耗品外可以反复再利用。
第三届全国大学生机械创新设计大赛决赛参赛作品设计说明书格式要求说明1.总体要求全文控制在8~15页以内,并按以下顺序编排:作品名+“设计说明书”、设计者、指导教师、学校名+院系名+学校所在城市+邮编、摘要、关键词、正文[可自行组织,但应包括下列内容:作品背景(国内外相关研究现状)、设计制作中解决的关键技术问题的描述、作品实物或实物模型的照片、创新特色、预计应用前景等]、参考文献。
可不加封面。
采用word 2003版本编排。
2.页面要求A4页面。
页边距:上25mm,下25mm,左、右各20mm。
标准字间距,单倍行间距。
不要设置页眉,页码位于页面底部居中。
3.图表要求插图按序编号,并加图名(位于图下方),采用嵌入型版式。
图中文字用小五号宋体,符号用小五号Times New Roman(矢量、矩阵用黑斜体);坐标图的横纵坐标应标注对应量的名称和符号/单位。
表格按序编号,并加表题(位于表上方)。
采用三线表,必要时可加辅助线。
4.字号、字体要求油罐车注油自动控制系统设计说明书[r1]设计者:×××,×××,×××,×××,×××[r2]指导教师:×××,×××[r3](XX大学机电学院,西安710056)[r4](空一行)[url=]作品内容简介[/url][I5]通过实验设计了一套自动加油系统……(400—600字以内)。
联系人、联系电话、EMAIL(空一行)1 研制背景及意义在新疆塔里木石油基地,目前从油井打出的原油储存到储油罐后,从储油罐向油罐车注油时,一个人需站在油罐车上注油口旁观察油罐是否加满,而另一个人关闭阀门。
因在原油内含有大量的有毒气体(硫化氢),从安全角度考虑站在油罐车上的人必须戴上防毒面具……2设计方案[r6]2.1 电磁控制用电磁控制比较容易实现,但是因为防火、防暴的原因,加油区不得用电,无法用电磁控制…………2.2 气动控制用气动控制,气源的空气压缩机也要用电,但可以将空气压缩机放置在远离加油区的位置。
机械创新设计大赛作品设计说明书格式设计说明书一、项目背景在当今快速发展的时代,机械创新设计大赛作为促进科技创新和实践能力培养的重要平台,对于提升青年学生的机械设计水平具有重要意义。
本文档将详细介绍我们参加机械创新设计大赛的作品设计过程和相关内容。
二、项目简介1.设计目标我们的设计目标是开发一款具有创新性和实用性的机械产品,旨在解决特定问题并提高工作效率。
2.项目范围我们的设计范围包括机械构造、电气控制系统、自动化解决方案等方面。
三、设计方案1.创意及功能(在这一章节中详细描述我们的创意和功能特点)2.结构设计(详细描述机械产品的结构设计,包括各个部件的设计和组装方式)3.电气控制系统设计(详细描述电气控制系统的设计,包括传感器、执行器、控制算法等)4.自动化解决方案(详细描述我们的自动化解决方案,包括自动化程度、系统响应速度等)5.材料选用与加工工艺(详细描述我们选用的材料种类及其优劣势,以及加工工艺的选择与原因)四、范例应用在这个章节中,我们将一些范例应用场景,展示我们的机械产品的实际应用效果。
五、实施计划1.设计阶段(详细描述我们的设计阶段,包括设计计划、时间表、人员分工等)2.制造阶段(详细描述我们的制造阶段,包括材料采购、加工工艺、制造计划等)3.测试与优化阶段(详细描述我们的测试与优化阶段,包括功能测试、性能测试、优化方案等)六、项目管理1.风险管理(详细描述我们在项目过程中可能遇到的风险,并提出相应的管理措施)2.资源管理(详细描述我们的资源管理策略,包括人力资源、物质资源等)3.进度管理(详细描述我们的进度管理策略,包括进度监控、问题解决等)七、市场前景与应用前景在这个章节中,我们将详细分析我们的产品在市场中的前景和应用前景,包括市场需求、竞争分析、市场推广策略等。
八、附件本文档涉及的附件包括但不限于技术图纸、设计草图、实物照片等。
九、法律名词及注释1.法律名词1:解释12.法律名词2:解释2十、全文结束。
机械创新设计大赛作品说明书
——(台阶式商品装卸机构)
设计目的:
由于从厢式货车上卸载货物或者往车上装载商品主要靠人工操作,需要多名操作人员,效率较低且耗费人工。
本机构基于联动的多个多杆机构,可以达到商品装载和卸载的目
的。
载物叉1
载物叉2
图1.-1
如图1-1,载物叉1处于高位,车上人员将货物搬运到载物叉1上。
多杆机构简图如1-2所示:
图1-2
图中,多杆机构结构类似于契贝谢夫行走机器人结构,我们将这个机构倒过来使用,通过两连杆伸长端的运动规律使两载物叉产生水平和竖直方向的相对位移,正转时能将商品由高到低卸载,反转时可将低处商品运往高处。
图1-3
两叉在等高处进行载荷的接替
图1-4
完成接替,在下方安装相似结构,通过皮带传动联动,可使货物达到台阶式下降的效果。
运送至最下一级的载物叉后,由卸载装置将货物倒出,运动简图如图: 载物叉1 下一阶段机构的载物叉
载物叉2
图1-5
通过如图多杆机构使货物倾斜一定角度依靠重力滑下,载物台归位过程中凸轮推动推杆将货物推开为下一件货物挪出位置。
优势:
相对于传送带机构,因为每一级都是水平抬放,无需考虑物品的摩擦 货物
推杆 载物叉。
机械创新设计大赛参赛作品设计说明书作品名称:设计者:指导教师:参赛单位:1/ 17硬币分类清点装置设计说明书设计者:指导老师:摘要:本设计围绕服务社会的主题,针对目前公交公司、商超等对大量硬币进行分类、清点的实际需求,开展了一种可对目前流通的所有不同种类的硬币实施快速分类与清点的机械装置的设计工作。
制造出的装置原型在实际运行中,有效的将混杂在一起的硬币进行了分类收集与清点。
本设计结构精巧,使用方便,有望得到广泛应用,服务社会。
关键词:硬币分离清点;离心筒;转盘;滑道作品内容简介通过对第七届全国大学生的主题为“服务社会——高效、便利、个性化”、内容为“钱币的分类、清点、整理机械装置”详细分析,以及结合日常生活和市场调研,我们发现目前城市公交公司、超市和银行关于硬币的分类主要依赖于人工,人力成本高且效率低下,为此我们设计了一种硬币分类清点装置。
本装置主要由分离、筛选、清点和收集四个功能模块组成,主体为金属框架结构,长50cm,宽30cm,高50cm,适用于新旧1元、新旧0.5元、新旧0.1元等现有流通硬币。
本设计源于社会实际需要,在银行、公交以及超市等硬币流通现状调研的基础上,开发设计符合实际、高效可靠的硬币分类清点装置,市场适应性强。
1 设计背景及意义在日常生活中,由人工对钱币进行清点是一件非常繁琐的工作,效率低,速度慢,造成了人力资源的巨大浪费。
硬币伴随着人们的衣食住行,在社会中大量流通,超市,公交公司,银行等地方是硬币大量集中的地点,每天都会有数以万计的硬币。
这些硬币如果由人工清点,将会造成巨大的人力资源浪费,因此用机械来代替人工进行清点将是以后发展的趋势。
近年来,伴随科技在各个领域的突破,计算机和机械设备的结合并应用于日常生活中,为人们的生活提供了极大的便利。
硬币是人们生活中不可或2/ 17。
全国机械创新设计大赛说明书(总17页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--机械创新设计大赛参赛作品设计说明书作品名称:设计者:指导教师:参赛单位:硬币分类清点装置设计说明书设计者:指导老师:摘要:本设计围绕服务社会的主题,针对目前公交公司、商超等对大量硬币进行分类、清点的实际需求,开展了一种可对目前流通的所有不同种类的硬币实施快速分类与清点的机械装置的设计工作。
制造出的装置原型在实际运行中,有效的将混杂在一起的硬币进行了分类收集与清点。
本设计结构精巧,使用方便,有望得到广泛应用,服务社会。
关键词:硬币分离清点;离心筒;转盘;滑道作品内容简介通过对第七届全国大学生的主题为“服务社会——高效、便利、个性化”、内容为“钱币的分类、清点、整理机械装置”详细分析,以及结合日常生活和市场调研,我们发现目前城市公交公司、超市和银行关于硬币的分类主要依赖于人工,人力成本高且效率低下,为此我们设计了一种硬币分类清点装置。
本装置主要由分离、筛选、清点和收集四个功能模块组成,主体为金属框架结构,长50cm,宽30cm,高50cm,适用于新旧1元、新旧元、新旧元等现有流通硬币。
本设计源于社会实际需要,在银行、公交以及超市等硬币流通现状调研的基础上,开发设计符合实际、高效可靠的硬币分类清点装置,市场适应性强。
1 设计背景及意义在日常生活中,由人工对钱币进行清点是一件非常繁琐的工作,效率低,速度慢,造成了人力资源的巨大浪费。
硬币伴随着人们的衣食住行,在社会中大量流通,超市,公交公司,银行等地方是硬币大量集中的地点,每天都会有数以万计的硬币。
这些硬币如果由人工清点,将会造成巨大的人力资源浪费,因此用机械来代替人工进行清点将是以后发展的趋势。
近年来,伴随科技在各个领域的突破,计算机和机械设备的结合并应用于日常生活中,为人们的生活提供了极大的便利。
硬币是人们生活中不可或缺的东西,每天数以万计的硬币需要清点,为了解决这一生活中的难题,近年来越来越多的人开始关注这方面的问题,也有研究所开始着手设计制造硬币自动分选机构,虽然已有多种钱币自动分拣机构,但未在社会上广泛使用。
机械创新大赛说明书-机械创新大赛说明书机械创新设计大赛说明书机械创新设计大赛说明书作品名称:“新型智能‘百叶’窗”设计团队:xxxxxxxxxxxxx指导老师: xxxxxxxxx联系人:xxxxxxxxxxx电话:xxxxxxxxxxxxx摘要:教室里人口密度这么大,缺乏流通的空气会影响学生的健康和学习。
尤其是冬季,学生怕冷,教室长时间封闭,空气质量容易下降,特别是CO2浓度和微生物含量容易超标。
教室空气质量的下降影响学生健康,对呼吸系统的影响尤为明显,学生极易疲劳也是受教室空气质量下降的影响。
关键字:窗户,自动控制,空气质量,“百叶”一.研制背景:通风问题在窗户紧闭的有限空间里,将导致空气污浊,细菌数增加,温湿度上升。
教室空气污染主要污染物有:校舍改建装潢的装饰材料中的挥发性有机物甲醛等,建筑材料中的氡,粉笔灰等可吸入颗粒物,悬浮于空气中的致病微生物,过高浓度的二氧化碳等等。
在新鲜空气中,二氧化碳的含量约为0.03%-0.04%,人能承受的二氧化碳浓度是1.5%以下。
关于二氧化碳的室内空气中最大允许含量,目前,尚无统一规定,一般公认室内空气中二氧化碳浓度达0.1%以上时为污染。
上海市奉贤区中小学教室空气质量调查结果:寒冷季节教室内CO2体积分数由课前的%逐节上升,至上午第4节课后达到%。
空气细菌总数课前为个/cm,第4节课后上升至个/cm;教室内可吸入颗粒物课前/m,第4节课后为/m;教室内温度课前为℃,第4节课后保持为℃;湿度课前为%,第4节课后上升到%。
CO2体积分数、细菌总数课前与第1,2,3,4节课后的差异有统计学意义。
医学专家表示:室内通风与不通风情况下的学生记忆力、反应速度、注意力集中程度及动作稳定程度都不同。
教室空气二氧化碳浓度增大与学生疲劳有直接关系,学生正处于生长发育期,呼吸量按体重比比成人高许多,各种生理代谢十分旺盛,在教室内学习的时间又较长,长时间处于低氧高二氧化碳环境,严重的会有胸闷、气短、头晕、头疼等现象,并使机体免疫能力下降。
大学机械创新设计课程作品设计说明书作品名称:自立式电动升降平移梯设计者:专业班级:机自指导教师:目录一、作品简介 (2)二、创作基于的背景及意义 (2)三、产品结构及工作原理分析 (2)1.总体结构 (2)2.升降系统传动方案 (2)3.梯架结构 (3)4.转向机构 (4)5.踏板滑块机构 (5)四、设计参数的确定及必要的计算 (5)1、梯子功能参数 (5)2.致确定所需要的电动机参数,选择相关电动机 (6)1)、升降系统电机 (6)2)、驱动系统电机 (6)3)、转向系统电机 (7)4)、电池粗略选择 (8)5)、驱动轴校核计算 (8)五、本次课程作品设计主要创新点 (9)六、参考文献 (10)一、作品简介本多功能电动升降梯采用人字形自立式踏板升降梯的基本结构形式,通过采用机电一体化设计,可遥控实现电动梯的升降、平移、转向等动作,以适应使用者在多点连续工作的需要。
产品的机械部分主要由梯架、升降系统、驱动系统、转向系统等四部分组成,在控制部分我们参照其它智能小车模式准备使用逻辑、电机、无线收发、红外避障等模块来实现其功能。
经过与普通的自立式便携梯相比较,我们可以看到该产品做到了自动化和智能化,使用户的工作效率显著提高,劳动强度大幅降低。
此外,与具有类似功能的升降平台相比,该产品成本低,结构紧凑,使用方便,能满足用户在室内使用的需求。
经过本组成员的考察发现该产品在家庭以及室内装修装潢公司、商场仓库、会展布置单位、汽车零配件仓库、药品和服饰企业等多个场合具有很大的市场潜力,因此具有很高的推广应用价值。
二、创作基于的背景及意义在日常生活当中,我们发现梯具是一种使用非常广泛的登高工具,在人们的工作生活中扮演着很重要的角色。
虽然目前市场上的大中型梯具已经部分实现自动化,使得产品综合性能得到很大程度的提高,但是这些产品受高负载这一功能要求的限制,自重和体积都较大,不能做到便携及室内使用,主要应用于室外工作场合,例如工程抢险、安全消防等,并且一般成本很高,多为专业用户定做,不适合大众用户。
第五届全国大学生机械创新设计大赛参赛作品设计说明书项目名称室内物品取送机器人指导教师张宝成项目负责人陈伟所属单位中北大学机械工程与自动化学院室内物品取送机器人设计说明书一、作品内容简介该室内物品取送机器人根据人发出的指示,可以实现从指定位置取回物品,或者从人所在的位置将物品取走,放回到指定位置,也可以实现人与人之间的物品传递。
二、产品研制背景与意义目前,人口老龄化已经成为世界范围的重大社会问题,其中60岁以上的人口增长速度最快。
同时,截至2011年底,我国60岁以上的老年人口达到1.85亿,占总人口的13.7%。
人口的加速老龄化使医疗和社会保险系统面临前所未有的压力,高龄老年人的自我照料能力差,行动和语言的能力下降,所以需要给予他们特别的护理。
各类残疾人和长期卧床老年人的大量存在,使得助老、助残问题日益成为一个重大的社会问题.研制开发助老、助残机器人产品,为老年人和残疾人提供诸如护理、陪伴等方面的服务,不仅能够提高老年人的生活质量,而且有助于老年人的心理健康,改善他们的精神状态。
我国助老、助残机器人的研究目前还处于刚刚起步的阶段。
此外,随着生活节奏的加快,人们不断追求更高质量的服务。
鉴于此,我们特设计出这款室内物品取送机器人,融合了运动控制、多传感器组合、路径规划等技术,以更好地协助行动不便的老年人或残疾人,同时也能方便未来的生活。
三、设计方案1、作品设计简介它采用两驱四轮机构,两驱动轮各由一个直流电机控制,大大增加了车体的灵活性。
采用折叠连杆机构,通过电动机驱动螺杆,进而带动螺母使连杆的支点分离与靠拢,实现载物平台的升降,结构简单稳定。
考虑到机械臂的多自由度控制程序不易编写,故采用柔性机械手的线驱动控制,以模仿人手实现对物体的抓取。
它以51系列单片机AT89C52作为检测和控制核心,采用红外光电传感器进行巡线以及对物体所在位置的定位,采用超声波传感器进行避障,通过遥控辅以无线控制模块以实现人对机器人的直接控制。
1.设计目的1。
随着城镇化的发展,越来越多的人口聚集在城镇,地价的升高对城镇的教育也造成了很大影响.一个班很多同学在一个教室里上课,不得不忍受着拥挤。
这种情况在大城市和一些重点学校尤其多见。
同学在课间时经常进出座位会对周边同学造成影响,有时候甚至会引起同学之间的矛盾。
拥有一个可以任意翻转桌斗的桌子,同学之间因桌子挤到的矛盾也会大大减少.2.传统桌子的形式较为呆板,使用者不能根据自己的需要和喜爱来调整桌子。
一个可以将桌面角度调整的桌子,满足了使用者除了正常使用之外如画图、画画等其他用途。
3.传统桌子在教室中占用面积大,且移动不方便。
桌子的桌腿可以拆卸放入桌斗中,在不使用桌子时,可以将桌子拆装后放在一起,节省空间。
同时如果需要搬桌子时,桌子方便移动的优点就体现出来了。
2.主要创新点1。
桌斗的旋转,方便同学课间时的出入;2.桌面的调整的无极升降,桌面可以根据自己的需要倾斜一定角度,满足画图和画画一些需要;3.桌腿可以拆卸和折叠,当不使用桌子时可以将桌腿拆卸,折叠后放入桌斗,桌子放在一起节省空间;4。
桌斗的拉杆和导轮组合,在需要搬桌子时,搬运的方便解决了搬桌子的苦恼.3.工作原理1.桌斗旋转功能的实现:桌斗和桌腿之间通过轴承联接既可以实现自由旋转,在联接处安装的一个插销可以实现旋转或固定的两个功能.轴承的联接采用了台阶轴和轴承座,很好的将桌腿和桌斗联接在一起。
台阶轴轴承座2.桌面调整功能的实现:通过梯形螺纹丝杆的旋进旋出推动桌面板后端升降,梯形螺纹具有调节速度快的优点。
丝杆与桌斗之间通过多自由度活动铰接联接,当丝杆升高下降时能适应配合丝杆与桌面之间的滑动和转动变化。
升降丝杆升降杆支座实物图活动铰接3.卓腿拆卸和折叠功能的实现:桌腿与桌斗之间采用的是螺纹联接,可以自由拆卸。
桌腿的个关节处采用了合叶和螺纹固结的方法,实现桌腿的作用及折叠。
实物图4.搬运方便的功能实现:通过桌斗腹板下的导轮和拉杆实现了搬运方便的功能。
机械创新设计大赛作品说明书
——(台阶式商品装卸机构)
设计目的:
由于从厢式货车上卸载货物或者往车上装载商品主要靠人工操作,需要多名操作人员,效率较低且耗费人工。
本机构基于联动的多个多杆机构,可以达到商品装载和卸载的目
的。
载物叉1
载物叉2
图1.-1
如图1-1,载物叉1处于高位,车上人员将货物搬运到载物叉1上。
多杆机构简图如1-2所示:
图1-2
图中,多杆机构结构类似于契贝谢夫行走机器人结构,我们将这个机构倒过来使用,通过两连杆伸长端的运动规律使两载物叉产生水平和竖直方向的相对位移,正转时能将商品由高到低卸载,反转时可将低处商品运往高处。
图1-3
两叉在等高处进行载荷的接替
图1-4
完成接替,在下方安装相似结构,通过皮带传动联动,可使货物达到台阶式下降的效果。
运送至最下一级的载物叉后,由卸载装置将货物倒出,运动简图如图: 载物叉1 下一阶段机构的载物叉
载物叉2
图1-5
通过如图多杆机构使货物倾斜一定角度依靠重力滑下,载物台归位过程中凸轮推动推杆将货物推开为下一件货物挪出位置。
优势:
相对于传送带机构,因为每一级都是水平抬放,无需考虑物品的摩擦 货物
推杆 载物叉。