模拟设计法控制器设计140230225
- 格式:docx
- 大小:317.62 KB
- 文档页数:8
遥控开关及仿真课程设计一、课程目标知识目标:1. 学生能够理解并掌握遥控开关的基本原理,包括信号发射、接收与执行机构的运作机制。
2. 学生能够描述仿真软件在电路设计中的应用,并运用其进行遥控开关电路的搭建与测试。
3. 学生能够解释遥控开关中涉及的基础电子元件的功能和相互关系。
技能目标:1. 学生能够运用所学知识,设计并搭建一个简单的遥控开关电路。
2. 学生能够有效地使用仿真软件对遥控开关电路进行仿真测试,分析并解决简单问题。
3. 学生通过实践操作,提高动手能力,培养电路故障诊断和排除的基本技能。
情感态度价值观目标:1. 学生在课程中培养对电子技术的兴趣,激发创新意识和探索精神。
2. 学生通过小组合作,学会分享和交流,培养团队协作能力和集体荣誉感。
3. 学生能够认识到科技发展对日常生活的影响,增强社会责任感,培养节能环保意识。
课程性质分析:本课程属于电子技术领域,结合仿真软件,旨在通过理论与实践相结合的方式,提高学生的电子技术应用能力。
学生特点分析:考虑到学生所在年级的特点,他们具备一定的物理和数学基础,同时具有一定的动手能力和探索欲望,因此课程设计应注重实践性和创新性。
教学要求分析:教学中应注重引导学生主动探索,通过项目式的学习方法,使学生将理论知识与实践操作相结合,确保学习目标的实现。
教学过程中要关注学生个体差异,提供个性化的指导和支持。
二、教学内容1. 遥控开关原理介绍:信号发射与接收、执行机构工作原理。
- 相关章节:教材第三章“无线通信原理”,第四章“执行器及其控制”。
2. 电子元件功能与选型:介绍遥控开关中常用的电子元件,如晶体振荡器、放大器、继电器等。
- 相关章节:教材第二章“常用电子元件”。
3. 仿真软件应用:讲解仿真软件的使用方法,遥控开关电路设计及仿真测试。
- 相关章节:教材第五章“电子电路仿真”。
4. 实践操作:分组进行遥控开关电路搭建、仿真测试与故障排查。
- 相关章节:教材第六章“实践操作”。
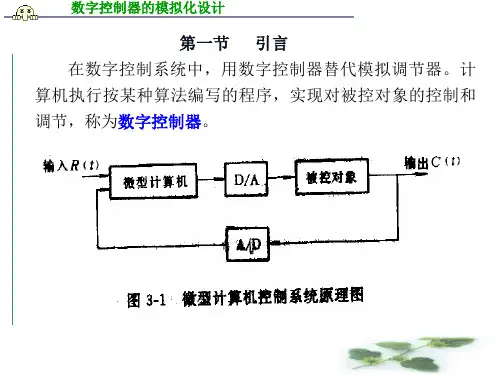
控制器的仿真模拟说明书1. 简介控制器是一种重要的设备,用于监控和支持各种系统的运行。
为了确保控制器的正常工作以及性能的优化,使用仿真模拟技术来评估控制器的设计和功能是至关重要的。
本说明书将详细介绍如何进行控制器的仿真模拟,以实现对控制器的准确评估和优化。
2. 仿真模拟软件的准备在进行控制器的仿真模拟前,我们需要准备一款专业的仿真软件。
推荐使用XXXX软件作为仿真模拟工具,该软件提供了强大的仿真功能、可视化操作界面以及丰富的结果分析工具。
3. 控制器仿真模型的建立在仿真模拟软件中,首先需要建立控制器的仿真模型。
根据实际的控制器设计和功能要求,结合相关的数学模型和控制算法,使用该软件提供的建模工具和函数库,建立控制器的仿真模型。
确保模型准确反映实际控制器的行为,并考虑可能的外界因素。
4. 输入信号的定义和设置控制器的仿真模拟需要输入一系列的信号以模拟实际的运行环境和操作情况。
根据控制器的设计要求和目标,定义合适的输入信号。
例如,可以设置不同的控制输入、干扰信号或故障情况,以观察控制器的响应和稳定性。
在仿真模拟软件中,通过设置参数和输入函数来定义输入信号。
5. 仿真实验的运行和结果分析完成控制器模型的建立和输入信号设置后,可以开始运行仿真实验,并对仿真结果进行分析。
在仿真模拟软件中,可以通过设置仿真时间、采样周期等参数来控制仿真实验的运行过程。
实验运行结束后,使用软件提供的结果分析工具,对仿真结果进行评估和优化。
分析结果包括控制器的输出响应曲线、误差曲线、稳定性指标等。
6. 仿真实验的优化和验证通过对仿真结果的分析,可以进行控制器的优化和验证。
针对性地调整控制器的参数、算法或输入信号,以改进其性能和稳定性。
根据优化后的控制器,重新运行仿真实验,并对结果进行验证。
如果仿真结果满足设计要求,则可以进入实际控制器的制造和部署阶段。
7. 结论控制器的仿真模拟是一项重要的工作,可以在设计阶段对控制器的性能进行评估和优化。
模拟设计法控制器设计
设单位反馈系统的开环传递函数为)
102.0)(112.0()(0++=
s s s K
s G ,采
用模拟设计法设计数字控制器,使校正后的系统满足如下指标:70≥Kv ,%40≤p M ,s t s 1≤。
报告内容:
1. 控制系统仿真和设计步骤,应包含性能指标计算(含曲线)、采样周期的选择、数字控制器的脉冲传递函数和差分方程;
2. 单片机、A/D 、D/A 的选择,画出原理图;
3. 采用单片机实现,画出软件流程图,详细到变量赋值;
4. 体会和总结
注意事项:
1.注意考虑算法编排结构,考虑单片机定时采样、单片机A/D 、D/A 操作等的实现方法
2. 每人提交一份打印的报告(A4纸,左侧两钉装订,为节约资源,要求最终装订后的报告含封面不超过6页纸张,可以双面打印)。
报告要采用统一的封面(格式附后),各级标题采用宋体四号字,正文采用五号宋体字,单倍行距。
3. 图要用合适的软件绘制(如Protel ,Visio),排版尽量节约版面,调整到能够看清楚最小字号的内容即可。
4. 鼓励采用Proteus 做仿真和调试代码。
5. 本设计共10分,严禁抄袭,发现雷同者一律零分。
模拟设计法控制器设计报告
姓名:
班级:
学号:
2017年4月7日
一.控制系统仿真和设计步骤 1.1实验要求
设单位反馈系统的开环传递函数为
)102.0)(112.0()(0++=
s s s K
s G ,采用模拟设计法设计
数字控制器,使校正后的系统满足如下指标:70≥Kv ,
%
40≤p M ,
s
t s 1≤。
1.2性能指标的计算
(1)由0s 0
Kv=lim ()70
s G s →⋅=可画出K0=70的未校正系统对数幅频特性。
如图1所示,当w=1时,020lg G =20lgK=36.9dB
可以求出未校正系统的剪切频率
024/c rad s ω=
图1 未校正系统的bode 图
(2)绘制期望特性。
低频段与未校正部分重合,中频段在绘制之前,首先将p
M ,s t
转化为频域指标
r
M ,
c
ω。
r
M =1.6,由
K s c
t π
ω
=
可得
c =K ωπ
2
r r r K=2+1.5M -1+2.5M -1M =1.6
()(),
代入可求得K=3.8,wc=K*π=12rad/s ,可以算出
r 2c r
M -1=4.46rad/s M ωω≤ r 3c
r M +1=19.3rad/s M ωω≥
在wc=12rad/s 处,作-20dB/dec 斜率直线,交20lg|G0|于w=48rad/s 处,取w2=4rad/s ,w3=48rad/s ,此时
3
2
h=
=12
ωω。
可以粗略计算相应的相位裕度
h -1
=a rc s in
=57.8h +1
γ,过w2作横轴垂线,与中频段-20dB/dec 直线交点处,作-40dB/dec
直线,该直线与期望特性低频段交于w1=0.68rad/s 处,至此中低频衔接段完成。
中,高频衔接段在w3=48rad/s 处作横轴垂线与-20dB/dec 中频段直线交点处作斜率 -40dB/dec 直线,交未校正系统高频段于w4=50rad/s 处;当w ≧w4的时候,期望特性与未校正系统的高频特性一致。
至此,期望特性的全部参数已经得出 w1=0.68rad/s w2=4rad/s w3=48rad/s w4=50rad/s wc=12rad/s h=12
(3)将期望特性|G|dB 与|G0|dB 相减,可得串联校正装置特性|Gc|dB ,其传递函数为
c 1+0.25s (10.12)G =
(1 1.47)(10.021s s s +++())
(4)验算,校正后系统开环传递函数。
由wc=12rad/s 可以算出s t
=0.88s ,
p
M =0.36,
r
M =1.5,可以满足性能指标要求。
(6)画出校正前后系统的阶跃响应曲线
图2阶校正前后的跃响应曲线
1.3用模拟法设计数字控制器
(1)模拟控制器离散化
采用双线性变换法。
(2)采样周期选择
实际应用时,应取 s b 4~10ωω≥
() ()s Rmax 4~10ωω≥ s
200~500rad/s ω≥
考虑到A/D ,D/A 转换的时间以及单片机计算的时间,采样时间不能选的太小,但是为了保证离散控制器的控制仍能满足性能指标的要求,采样时间不能取得太大,故取 T=0.01s
(3)将模拟控制器离散化
离散化后得脉冲函数为:
220.50670.91650.4124
() 1.56920.5717c z z G z z -+=
-+
(4)被控对象离散化
离散化的被控对象为:
220.07080.14160.0708
() 1.93930.9434p z z G z z z -+=
-+
(5)由Simulink 建立仿真模型以仿真离散控制器。
Simulink 仿真模型原理图如下:
图3 Simulink 仿真模型原理图 (6)离散系统的阶跃响应曲线:
图4 离散系统的阶跃响应曲线
(7)转换为差分方程的形式:
根据式 ()
()
()c U z G z E z = ,可得差分方程为
() 1.5692(1)0.5717(2)0.5067()0.9165(1)0.4124(2)u k u k u k e k e k e k =---+--+-
二.单片机电路设计 2.1电路的设计
(1)A/D电路的设计
将AD转换的ADDA,ADDB,ADDC接地,选择IN0锁存器。
EOC接P2.2,转换结束则输出1,否则输出为0;OE接P2.1,选择是否输出数据。
OE=0,输出高阻态,OE=1输出数字量;ST接P2.0,转化开始信号。
由1变0转换开始;IN0接输入的模拟数据e(t);IN1-IN7悬空;Clock接分频器74ls74的输出端,输入500KHZ时钟信号;Vref(+)接+5V,Vreft(-)接地,VCC接电源,GND接地;ALE地址锁存,上跳沿锁存,可以接在P2.0口。
D0-D7接单片机的P1.0-P1.7;
(2)D/A电路设计
D0-D7接单片机的P0.0-P0.7,数字量输入;将CS,WR1,WR2,XFER,引脚接地;ILE引脚接+5V,Vref选择+5V,GND接地;此时DAC0832处于直通工作方式,一旦有数字量输入,就直接进入DAC寄存器,进行D/A转换。
(3)单片机8051的电路设计:
P0.0-P0.7接D/A转换数字输入端;P1.0-P1.7接A/D转化数字输出端;P2.0接A/D转换ST端;P2.1接A/D转换OE端; P2.2接A/D转换EOC端;外接12MHZ的时钟电路输入到时钟端
XTAL1,XTAL2;外接复位电路到RET;
2.2单片机原理图
图五单片机原理图
三.控制算法流程图
四.体会和总结
在为期一周的课程设计过程中遇到了好多问题,包括各种软件的熟练程度不够,对各种软件的了解比较少,今后需要加大对这方面的学习,需要在毕设方面加大对这些方面的学习,尽可能的熟练掌握专业所需的相关软件的运用,同时在此次过程中我也对大学期间所学的内容巩固了一边,综合应用了专业课所学的知识,而且相对的熟悉了专业领域常用软件的使用,收获很多,这次课设经验让我学到的不只是课设本身的相关知识更是一种学习方法一种学习方式的收获,为我们以后的学习工作打下了基础。