眼动仪EyeLink II-课件(PPT·精选)
- 格式:ppt
- 大小:1.45 MB
- 文档页数:33





眼动仪眼动仪(eye tracker)是测试人眼活动情况和研究有关心理过程的专用仪器。
人在进行无意注意或者有意注意时,眼睛的视线总是对准知觉对象的某一点(即眼睛的注视点),并不断地转动着视线以转换注意的目标。
眼睛是以跳动的方式将视线转换到新的目标上去的,在每次目标转换以后,眼睛稍许停顿片刻,注视这一目标,然后再跳动到新的注视点上去。
在注意对象时,眼睛就是这样不断地以注视、跳动、再注视……来达到对知觉对象的整体观察。
眼动仪就是用来研究注意时眼球运动的轨迹,以确定注意时不同部分所起的作用,进而分析信息加工过程的某些特点。
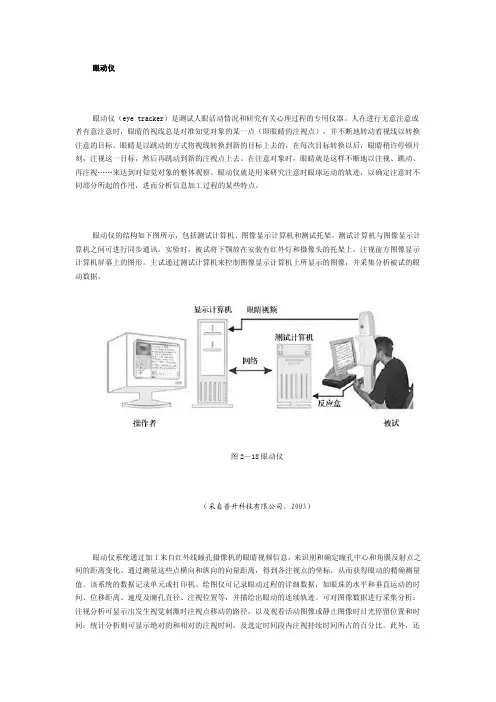
眼动仪的结构如下图所示,包括测试计算机、图像显示计算机和测试托架。
测试计算机与图像显示计算机之间可进行同步通讯。
实验时,被试将下颚放在安装有红外灯和摄像头的托架上,注视前方图像显示计算机屏幕上的图形。
主试通过测试计算机来控制图像显示计算机上所显示的图像,并采集分析被试的眼动数据。
图2-18眼动仪(采自普升科技有限公司,2003)眼动仪系统通过加工来自红外线瞳孔摄像机的眼睛视频信息,来识别和确定瞳孔中心和角膜反射点之间的距离变化。
通过测量这些点横向和纵向的向量距离,得到各注视点的坐标,从而获得眼动的精确测量值。
该系统的数据记录单元或打印机、绘图仪可记录眼动过程的详细数据,如眼珠的水平和垂直运动的时间、位移距离、速度及瞳孔直径、注视位置等,并描绘出眼动的连续轨迹。
可对图像数据进行采集分析:注视分析可显示出发生视觉刺激时注视点移动的路径,以及观看活动图像或静止图像时目光停留位置和时间;统计分析则可显示绝对的和相对的注视时间,及选定时间段内注视持续时间所占的百分比。
此外,还可记录相关实验数据,如注视点数据(每个注视点的平均持续时间和百分比)、兴趣区(向被试呈现的视觉刺激的某一特定区域)、驻留时间(花费在注视一个兴趣区上的总时间)、扫视时间和距离(两个注视点之间的间隔时间和长度)、平均瞳孔直径等。

