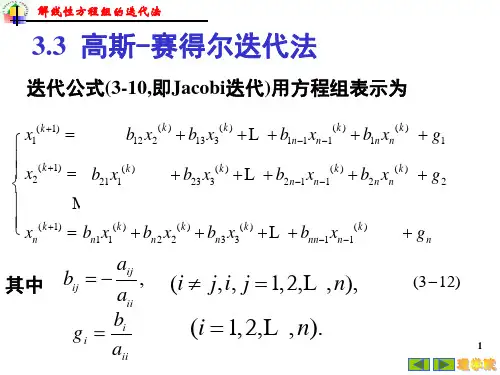
高斯-赛德尔迭代法
- 格式:doc
- 大小:58.00 KB
- 文档页数:3
标题:深入探讨MATLAB中的高斯-赛德尔迭代法一、概述MATLAB是一种强大的数学计算软件,被广泛应用于科学、工程和金融等领域。
在数值分析中,迭代法是解决非线性方程组和矩阵方程组的重要方法之一。
高斯-赛德尔迭代法是其中的一种,其在求解线性方程组时具有较好的收敛性和效率。
本文将深入探讨MATLAB中高斯-赛德尔迭代法的原理和实现方法。
二、高斯-赛德尔迭代法原理高斯-赛德尔迭代法是一种求解线性方程组的迭代法。
给定线性方程组Ax=b,其中A为系数矩阵,b为常数向量,迭代法的基本思想是通过不断逼近方程组的解x。
高斯-赛德尔迭代法的迭代公式如下:\[ x^{(k+1)} = D^{-1} (b - (L+U)x^{(k)}) \]其中,D、L和U分别为系数矩阵A的对角线、严格下三角部分和严格上三角部分。
迭代法的初始值可以任意选择,通常选取一个与解接近的初值,然后通过迭代逼近真实解。
三、MATLAB中高斯-赛德尔迭代法的实现MATLAB提供了丰富的数值计算函数和工具箱,使得高斯-赛德尔迭代法的实现变得非常简单。
下面我们将介绍如何在MATLAB中使用高斯-赛德尔迭代法求解线性方程组。
1. 设置参数在使用高斯-赛德尔迭代法之前,我们首先需要设置一些参数,如系数矩阵A、常数向量b、迭代步数等。
在MATLAB中可以通过定义变量来实现这些参数的设置。
2. 编写迭代函数接下来,我们需要编写高斯-赛德尔迭代法的迭代函数。
通过编写一个MATLAB函数来实现迭代公式的计算和迭代过程的控制。
3. 调用函数求解完成迭代函数的编写后,我们就可以通过调用该函数来求解线性方程组。
在MATLAB中,可以使用循环语句控制迭代步数,并在每一步更新迭代值,直到满足收敛条件为止。
四、案例分析为了更好地理解高斯-赛德尔迭代法在MATLAB中的应用,我们以一个具体的案例来进行分析和实践。
假设我们需要求解以下线性方程组:\[ \begin{cases} 4x_1 - x_2 + x_3 = 8 \\ -x_1 + 4x_2 - x_3 = 9 \\2x_1 - x_2 + 5x_3 = 7 \end{cases} \]我们可以通过MATLAB编写高斯-赛德尔迭代法的函数,并调用该函数来求解以上线性方程组。
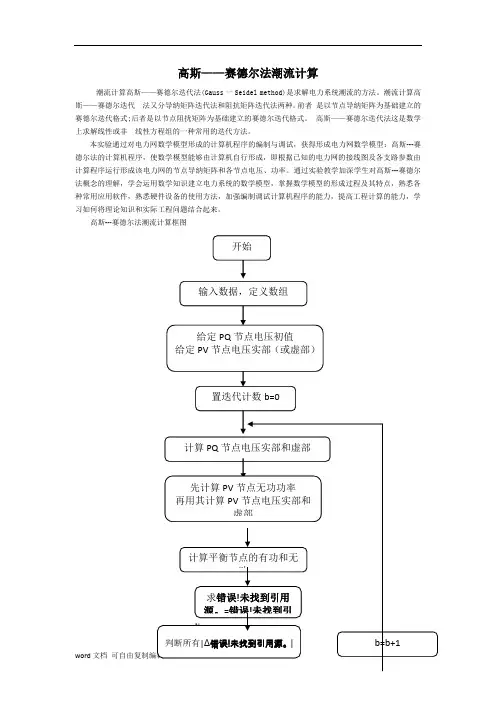
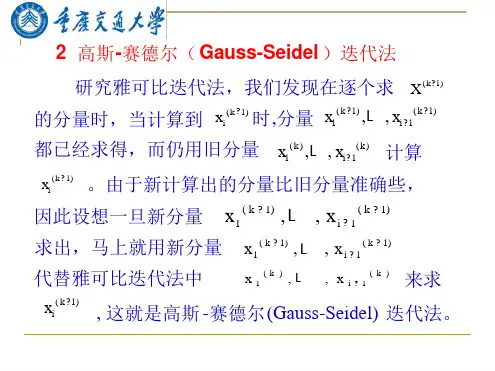
高斯——赛德尔法潮流计算潮流计算高斯——赛德尔迭代法(Gauss 一Seidel method)是求解电力系统潮流的方法。
潮流计算高斯——赛德尔迭代 法又分导纳矩阵迭代法和阻抗矩阵迭代法两种。
前者 是以节点导纳矩阵为基础建立的赛德尔迭代格式;后者是以节点阻扰矩阵为基础建立的赛德尔迭代格式。
高斯——赛德尔迭代法这是数学上求解线性或非 线性方程组的一种常用的迭代方法。
本实验通过对电力网数学模型形成的计算机程序的编制与调试,获得形成电力网数学模型:高斯---赛德尔法的计算机程序,使数学模型能够由计算机自行形成,即根据已知的电力网的接线图及各支路参数由计算程序运行形成该电力网的节点导纳矩阵和各节点电压、功率。
通过实验教学加深学生对高斯---赛德尔法概念的理解,学会运用数学知识建立电力系统的数学模型,掌握数学模型的形成过程及其特点,熟悉各种常用应用软件,熟悉硬件设备的使用方法,加强编制调试计算机程序的能力,提高工程计算的能力,学习如何将理论知识和实际工程问题结合起来。
高斯---赛德尔法潮流计算框图N开始输入数据,定义数组给定PQ 节点电压初值给定PV 节点电压实部(或虚部)置迭代计数b=0计算PQ 节点电压实部和虚部先计算PV 节点无功功率 再用其计算PV 节点电压实部和虚部计算平衡节点的有功和无功判断所有|Δ错误!未找到引用源。
b=b+1求错误!未找到引用源。
=错误!未找到引Y[1]系统节点的分类根据给定的控制变量和状态变量的不同分类如下① P 、Q 节点(负荷节点),给定Pi 、Qi 求Vi 、Si ,所求数量最多;② 负荷节点,变电站节点(联络节点、浮游节点),给定P Gi 、Q Gi 的发电机节点,给定Q Gi 的无功电源节点;③ PV 节点(调节节点、电压控制节点),给定P i 、Q i 求Q n 、S n ,所求数量少,可以无有功储备的发电机节点和可调节的无功电源节点;④ 平衡节点(松弛节点、参考节点(基准相角)、S 节点、VS 节点、缓冲节点),给定V i ,δi =0,求P n 、Q n (V s 、δs 、P s 、Q s )。
类矩阵两种迭代法的收敛性比较引言:在科学计算中,线性方程组的求解是很普遍的问题。
尤其是在大型科学计算中,线性方程组的求解是最重要的任务之一。
线性方程组的求解有很多种方法,例如高斯消元法、LU分解法、迭代法等等,其中迭代法是一种高效的方法。
迭代法的思想是从一个初值解开始,逐步改进解的准确度,直到满足误差要求。
在本文中,我们将讨论两种类矩阵迭代法的收敛性比较,即雅可比迭代法和高斯-赛德尔迭代法。
1.雅可比迭代法(Jacobi Iterative Method):雅可比迭代法是最简单的迭代法之一。
它是基于线性方程组的矩阵形式 Ax=b,将 A 分解成 A=D-L-U(D为A的对角线元素,L为A的下三角矩阵,U为A的上三角矩阵),其中 D 为对角线元素,L为严格下三角矩阵,U 为严格上三角矩阵。
则有如下迭代关系式: x^{(k+1)}=D^{-1}(L+U)x^{(k)}+D^{-1}b (1)其中,x^{(k)} 为 k 次迭代后的解,x^{(0)} 为初始解。
雅可比迭代法的迭代矩阵为M = D^{-1}(L+U)。
以下是雅可比迭代法的收敛性分析:定理1:若矩阵 A 为对称正定矩阵,则雅可比迭代法收敛。
证明:由于 A 为对称正定矩阵,所以存在唯一的解。
假设迭代后得到的解为 x^{(k)},则我们可以用误差向量 e^{(k)} = x-x^{(k)} 表示剩余项,则有 Ax^{(k)}-b = e^{(k)}。
对 (1) 式两边同时乘以 A^-1,得:x^{(k+1)}=x^{(k)}-A^{-1}e^{(k)}。
(2)将 (2) 式代入 Ax^{(k)}-b = e^{(k)} 中,得:Ax^{(k+1)}-b = Ae^{(k)}.(3)由于 A 为对称正定矩阵,则存在 A=Q\\Lambda Q^{-1},其中Q 为正交矩阵,\\Lambda 为对角矩阵。
因此,我们可以将 (3) 式转化为:\\| x^{(k+1)}-x \\|_{A} =\\| Q^{-1}A^{-1}Qe^{(k)}\\|_{\\Lambda} \\leq \\rho (Q^{-1}A^{-1}Q)\\|e^{(k)}\\|_{A}。
电力系统三种潮流计算方法的比较 一、高斯-赛德尔迭代法:以导纳矩阵为基础,并应用高斯--塞德尔迭代的算法是在电力系统中最早得到应用的潮流计算方法,目前高斯一塞德尔法已很少使用。
将所求方程 改写为 不能直接得出方程的根,给一个猜测值 得 又可取x1为猜测值,进一步得:反复猜测则方程的根优点:1. 原理简单,程序设计十分容易。
2. 导纳矩阵是一个对称且高度稀疏的矩阵,因此占用内存非常节省。
3. 就每次迭代所需的计算量而言,是各种潮流算法中最小的,并且和网络所包含的节点数成正比关系。
缺点:1. 收敛速度很慢。
2. 对病态条件系统,计算往往会发生收敛困难:如节点间相位角差很大的重负荷系统、包含有负电抗支路(如某些三绕组变压器或线路串联电容等)的系统、具有较长的辐射形线路的系统、长线路与短线路接在同一节点上,而且长短线路的长度比值又很大的系统。
3. 平衡节点所在位置的不同选择,也会影响到收敛性能。
二、牛顿-拉夫逊法:求解 设 ,则按牛顿二项式展开:当△x 不大,则取线性化(仅取一次项)则可得修正量对 得: 作变量修正: ,求解修正方程()0f x =()0f x =10()x x ϕ=迭代 0x 21()x x ϕ=1()k k x x ϕ+=()x x ϕ=()0f x =k k x x lim *∞→=0x x x =+∆0()0f x x +∆=23000011()()()()()()02!3!f x f x x f x x f x x ''''''+∆+∆+∆+=00()()0f x f x x '+∆=()100()()x f x f x -'∆=-10x x x =+∆00()()f x x f x '∆=-1k k k x x x +=+∆牛顿法是数学中求解非线性方程式的典型方法,有较好的收敛性。
自从20世纪60年代中期采用了最佳顺序消去法以后,牛顿法在收敛性、内存要求、计算速度方面都超过了其他方法,成为直到目前仍被广泛采用的方法。
雅克比迭代法和高斯赛德尔迭代法的算法描述一. 雅克比迭代法雅克比迭代法(Jacobi Iteration)是计算数值解的一种迭代方法,它遵循一个简单的步骤:给定问题的初始值,按照一定的规则,用求出某一个矩阵元素,替换当前值,得到下一个矩阵值,重复这个步骤,直到满足某一个条件,即为所求解的结果。
雅克比迭代法求解矩阵问题的一般步骤为:(1)给定初始矩阵A和右端值矩阵B,将第i行第j列的元素表示为aij,bi;(2)第i行其它元素之和定义为s(i) =∑(j≠i)|a(i, j)|,亦即∑|aij|;(3)如果s(i)不等于0,则第i行第i列元素的值更新为xi=1 (b(i) ∑(j≠i)[a(i, j)x(j)])/a(i, i)(4)重复步骤3,直到满足|X(i)X(i)|<ε(ε为设定的误差),此时x即为所求解的结果。
二. 高斯-赛德尔迭代法高斯-赛德尔迭代法(Gauss-Seidel Iteration)是另一种迭代方法,算法的基本思想也是:通过迭代,计算出当前矩阵的第i行第j列的元素xi;然后更新第i行第j列元素的值,继续迭代,直到某种条件满足,即可求出矩阵的解。
高斯-赛德尔迭代法的基本步骤为:(1)给定初始矩阵A和右端值矩阵B,将第i行第j列的元素表示为aij,bi;(2)第i行其它元素之和定义为s(i) =∑(j≠i)|a(i, j)|,亦即∑|aij|;(3)如果s(i)不等于0,则第i行第i列元素的值更新为xi=1 (b(i) ∑(j<i)[a(i, j)x(j)]∑(j>i)[a(i,j)x(j)] )/a(i, i)(4)重复步骤3,直到满足|X(i)X(i)|<ε(ε为设定的误差),此时x即为所求解的结果。
总结从上面的对比来看,雅克比迭代法和高斯赛德尔迭代法的步骤基本一致,均采用迭代的方式求解矩阵A的解X,不同的是,高斯赛德尔迭代法在更新矩阵A的第i行第i列元素时,采用把小于i的j元素的值替换成当前迭代求得的值来计算,而雅克比迭代法采用把全部j元素的值替换成当前迭代求得的值来计算。
高斯-赛德尔迭代-CAL-FENGHAI.-(YICAI)-Company One12012-2013(1)专业课程实践论文高斯-赛德尔迭代张禹廷,0818180111,R数学08-1班23一、算法理论高斯-赛德尔迭代是计算)1(+k x 的第i 个分量)1(+k i x 的方法,利用了已经计算出得最新分量)1,...,2,1()1(-==+i j x k j .高斯-赛德尔迭代法可以看作雅克比迭代法的一种改进.高斯-赛德尔迭代法没迭代一次只需计算一次矩阵与向量的乘法选取分裂矩阵M 为A 的下三角部分,即选取L D M -=(下三角矩阵),N M A -=,于是得到解b Ax =的高斯-赛德尔(Gauss-Seidel )迭代法⎪⎩⎪⎨⎧=+=+,...,1,0,,)()1()0(k f Bx xx k k 初始向量 (1)其中.)(,)()(111b L D f G U L D A L D I B ----=≡-=--=称U L D G 1)(--=为解b Ax =的高斯-赛德尔迭代法的迭代矩阵.下面给出高斯-赛德尔迭代法的分量计算公式.记T k n k i k k x x x x ),...,,...,()()()(1)(=由(1)式有,)()()1(b Ux x L D k k +=-+或,)()1()1(b Ux Lx Dx k k k ++=++4即∑∑-=+=++=--=111)()1()1(.,...,,2,1,i j n i j k j ij k j ij i k i ii n i x a xa b x a于是解b Ax =的高斯-赛德尔迭代法计算公式为()()⎪⎪⎩⎪⎪⎨⎧==--==∑∑+=-=++.,1,0,,2,1/)(),,(1)(11)1()1()0()0(1)0( k n i a x a x a b x x x x ii ni j k j ij i j k j ii i k iT n二、算法框图三、算法程序5#include "stdio.h"#include "math.h"# define m 3float a[m][m];float c[m];void gaosi();void main(){int i,j;float x[m],x1[m],eps[m];float s=0;float t=0;int p=1;int q=1;int k=0;float eps1;gaosi();for(i=0;i<=m-1;i++){for(j=0;j<=m-1;j++){s=float(s+fabs(a[i][j])); t=float(t+fabs(a[j][i])); }q=q&&(s<2*fabs(a[i][i])); p=p&&(t<2*fabs(a[i][i]));6s=0;t=0;}if((p+q)==0)printf("ERROR!");else{for(i=0;i<=m-1;i++){x[i]=0;x1[i]=0;}do{eps1=x[0]-x1[0];for(i=0;i<=m-1;i++){for(j=0;j<=m-1;j++) s=s+a[i][j]*x[j]; x[i]=(c[i]+a[i][i]*x[i]-s)/a[i][i]; s=0;eps[i]=float(fabs(x[i]-x1[i]));x1[i]=x[i];eps1=(eps1>eps[i])eps1:eps[i];printf("x%d=%f",i,x[i]);printf("\n");}7k=k+1;}while(eps1>1e-3);printf("迭代 %d 次",k);}}void gaosi(){int i,j;float b[m*m];printf("请输入一个矩阵a:\n"); for(i=0;i<=m-1;i++){for(j=0;j<=m-1;j++){scanf("%f",&b[j+i*m]);a[i][j]=b[j+i*m];}}printf("请输入矩阵b\n");for(i=0;i<=m-1;i++)scanf("%f",&c[i]);}89 四、算法实现例1.利用高斯-赛德尔法迭代解方程⎪⎩⎪⎨⎧=++=-+=+-3612333311420238321321321x x x x x x x x x解:运行程序(1) 显示出 请输入一个矩阵a :输入⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--12331114238,回车。
高斯-赛德尔迭代法(Gauss-Seidel method)是一种用于求解线性方程组的迭代法。
它的基本思想是每次求解一个方程的未知量,并用该未知量的解代替原方程中的未知量,然后求解下一个方程的未知量。
这样不断进行迭代,直到所有的未知量都求得精确解为止。
高斯-赛德尔迭代法的公式为:
x(k+1) = B - AX(k) + x(k)
其中x(k) 是迭代次数为k 时的未知量向量,A 是系数矩阵,B 是常数向量。
高斯-赛德尔迭代法的优点是收敛速度快,适用于各种线性方程组,并且易于实现。
但是,它也有一些缺点,例如对系数矩阵的条件有一定要求,并且当方程组的系数矩阵不满秩时可能不收敛。
希望这些信息能帮到您。
雅克比迭代法和高斯-塞德尔迭代法(经典实用)雅克比迭代法和高斯-塞德尔迭代法都是求解线性方程组的经典方法,它们的基本思路是将矩阵分解为对角、上三角或下三角矩阵,然后通过迭代求解方程组。
以下将详细介绍这两种方法的原理和实现。
1. 雅克比迭代法雅克比迭代法是一种通过逐步迭代来求解线性方程组的方法。
假设有一个n*n的线性方程组Ax=b,其中A是一个对称正定矩阵。
将A分解为对角矩阵D、上三角矩阵U和下三角矩阵L的乘积,即A=D-L-U。
则可得到方程组的迭代格式如下:X_(k+1)=D^(-1)(L+U)X_k+D^(-1)b其中X_k为第k次迭代的解向量,D为A的对角矩阵,L为A的下三角矩阵,U为A的上三角矩阵。
雅克比迭代法的收敛条件为,当矩阵A是对称正定矩阵时,若其对角线元素都不为0,则Jacobi迭代法收敛。
此外,当矩阵A为对称正定矩阵时,雅克比迭代法还具有收敛速度快、实现简单等优点。
2. 高斯-塞德尔迭代法高斯-塞德尔迭代法是雅克比迭代法的改进。
其思路是每次计算时,直接用已知的最新值来更新解向量中未知量的值,从而加快迭代的速度。
具体来说,设有一个n*n的线性方程组Ax=b,方程组的迭代格式为:X_i+1= (b_i-a_i,i*X_i+1-a_i,i+1*X_i,+...-a_i,n*X_n) /a_i,i其中i表示求解方程组的第i个未知量,它的值是通过其他已知量的最新值来计算的。
3. 实用在实际应用中,雅克比迭代法和高斯-塞德尔迭代法在求解某些特定的线性方程组时往往比直接求解更具有优势。
例如,在求解非常大型的线性方程组时,直接求解的计算量很大,求解时间也很长。
而使用迭代法则可以大幅减少计算量和求解时间,提高求解效率。
此外,由于迭代法可以直观地呈现方程组的解向量随着迭代步数的变化情况,因此可以更快地检查迭代结果的趋势和误差范围。
总之,雅克比迭代法和高斯-塞德尔迭代法是求解线性方程组的两种有效方法,具有应用广泛、易于实现和迭代收敛速度快的优点。
高斯赛德尔迭代法特点《高斯赛德尔迭代法特点》高斯赛德尔迭代法啊,这是个很有趣的东西呢。
就像一群小伙伴在玩接力游戏,但又有点特别的规则。
它有一个很明显的特点,那就是它的计算顺序。
在这个迭代法里啊,每个变量的新值一计算出来,马上就可以用于后续变量的计算了。
这就好比你在做一道菜,你刚炒好了一种配菜,就立马能把它放到锅里和其他正在炒的菜一起混合翻炒。
这种计算顺序使得它的收敛速度有时候会比其他的迭代方法快。
比如说,你要计算一个方程组的解,就像是要找到宝藏的具体位置,高斯赛德尔迭代法就像是有一个比较机灵的寻宝路线,能够更快地接近宝藏的所在。
再说说它的存储需求。
这个方法不需要额外存储一个完整的旧的近似解向量。
就好像你去旅行,不用带一个大而无用的包裹。
这在处理大型的方程组时可就太有用啦。
想象一下,如果你要处理一个超级复杂的方程组,就像是管理一个超级大的仓库,如果每个东西都要单独占个大空间,那可就麻烦死了。
而高斯赛德尔迭代法就像是一个善于整理空间的小能手,能够节省不少的“存储空间”呢。
它还有一个很有意思的地方,就是它对于矩阵的性质很敏感。
如果这个矩阵具有某些特殊的性质,比如说对角占优,那高斯赛德尔迭代法就像是如鱼得水。
这就好比一个擅长在某种地形奔跑的小动物,在自己熟悉的地形里就能跑得特别快。
对角占优的矩阵就像是高斯赛德尔迭代法的主场,在这样的情况下,它的收敛性就更有保证啦。
就像一个经验丰富的渔夫,在自己熟悉的渔场里捕鱼,总是更容易捕到很多鱼。
不过呢,高斯赛德尔迭代法也不是万能的。
它的收敛性并不是在所有情况下都能保证的。
有时候它就像一个调皮的孩子,在不适合它的环境里就不好好工作了。
比如说矩阵不满足一定的条件时,它可能就会像迷失了方向的小鹿,一直在那里兜圈子,找不到正确的解。
从计算的复杂度来看,它的每次迭代计算相对来说比较简单。
就像是做一个简单的手工,虽然步骤多一点,但是每个步骤都不复杂。
这就使得它在一些实时性要求比较高的场景下有一定的优势。
一、 实验目的与要求
对于线性方程组⎪⎩⎪⎨⎧=++=++=++69228281027321
321321x x x x x x x x x
1. 用高斯-赛德尔迭代法求此方程组的近似解(终止迭代过程的最大允许迭代次数N ,近似解的误差限eps ,均由用户设定);
2. 通过数值实验说明,求此线性方程组的近似解时,高斯-赛德尔迭代法的收敛速度比雅可比迭代法的收敛速度要快一些。
(用同样精度要求的条件来比较迭代次数)
二、 实验方案(程序源文件)
运用MATLAB 软件编辑M 文件如下:
function EX()
a=input('请输入系数矩阵a :');
b=input('请输入矩阵b:');
N=input('请输入最大迭代次数N :');
esp=input('请输入近似解的误差限:');
if any(diag(a))==0
error('系数矩阵错误,迭代终止!')
end
D=diag(diag(a));
X0=zeros(size(b));
x1=0;
x2=0;
x3=0;
X1=[x1;x2;x3];
h=inv(D)*b;
B=inv(D)*(D-a);
B1=triu(B);
B2=tril(B);
k=1;
fprintf('高斯-赛德尔迭代法 \n');
fprintf('第0次迭代得:')
disp(X1');
while k<=N
x1=h(1,1)+B1(1,:)*X0;
X1=[x1;x2;x3];
x2=h(2,1)+B1(2,:)*X0+B2(2,:)*X1;
X1=[x1;x2;x3];
x3=h(3,1)+B2(3,:)*X1;
X1=[x1;x2;x3];
if norm(X1-X0,inf)<esp
fprintf('已满足误差限。
')
break ;
end
X0=X1;
fprintf('第%2d次迭代得:',k)
disp(X1');
k=k+1;
end
fprintf('满足误差限的高斯-赛德尔迭代近似解为:')
disp(X1');
fprintf('雅可比迭代法 ');
t=0;
Y0=zeros(size(b));
while t<=N
Y1=h+B*Y0;
if norm(Y1-Y0,inf)<esp
fprintf('满足误差限 \n')
break ;
end
Y0=Y1;
fprintf('第%2d次迭代得:',t)
disp(Y1');
t=t+1;
end
fprintf('满足误差限的雅可比迭代近似解为:')
disp(Y1');
fprintf('用高斯-赛德尔迭代法迭代次数为 %d次\n用高斯-赛德尔迭代法迭代次数为%d次\n',k-1,t-1)
三、实验结果和数据处理(运行结果,截图)
四、结论
根据实验结果得出以下结论:高斯-赛德尔迭代法的收敛速度比雅可比迭代法的收敛速度要快一些。