杠杆原理在人体中的应用 ppt课件
- 格式:ppt
- 大小:1.67 MB
- 文档页数:20
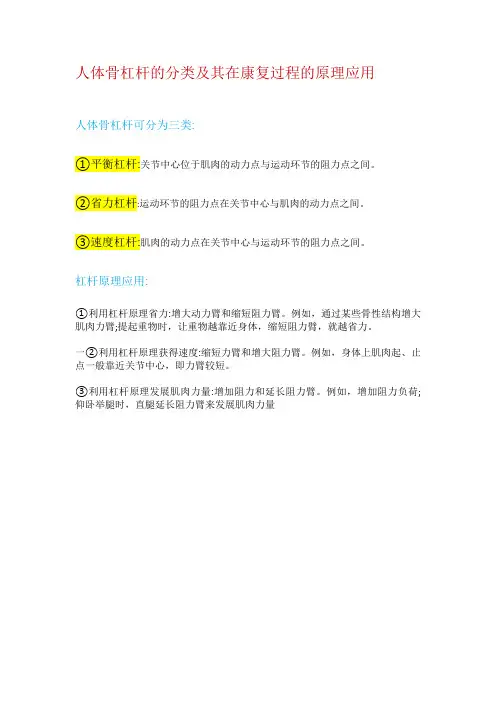
人体骨杠杆的分类及其在康复过程的原理应用
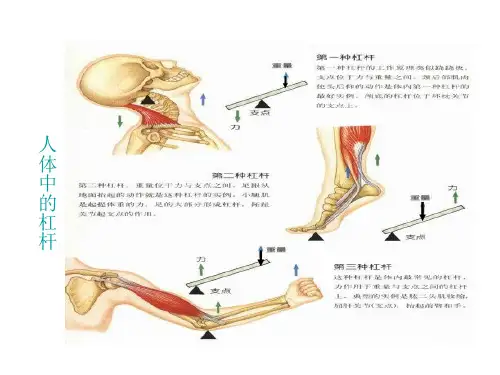
人体骨杠杆可分为三类:
①平衡杠杆:关节中心位于肌肉的动力点与运动环节的阻力点之间。
②省力杠杆:运动环节的阻力点在关节中心与肌肉的动力点之间。
③速度杠杆:肌肉的动力点在关节中心与运动环节的阻力点之间。
杠杆原理应用:
①利用杠杆原理省力:增大动力臂和缩短阻力臂。
例如,通过某些骨性结构增大肌肉力臂;提起重物时,让重物越靠近身体,缩短阻力臂,就越省力。
一②利用杠杆原理获得速度:缩短力臂和增大阻力臂。
例如,身体上肌肉起、止点一般靠近关节中心,即力臂较短。
③利用杠杆原理发展肌肉力量:增加阻力和延长阻力臂。
例如,增加阻力负荷;仰卧举腿时,直腿延长阻力臂来发展肌肉力量。
杠杆原理的生活应用示意图1. 引言杠杆原理是物理学中的一个重要概念,它在日常生活中有着广泛的应用。
本文将就几个常见的生活应用场景,通过列点方式展示这些应用。
2. 工具在生活中,我们常常使用杠杆原理来辅助完成一些工作。
下面列举几个常见的工具应用:•梯子:梯子是杠杆原理的应用之一。
当我们需要到达高处时,梯子可以提供支持,让我们站在梯子上,通过杠杆的原理来提供足够的力量,轻松到达目标高度。
•起重机:起重机也是杠杆原理的应用之一。
通过杠杆的力量,起重机可以轻松地举起重物。
这大大提高了工程施工的效率,减少了人力成本。
•刀具:在日常生活中,刀具是我们常用的工具之一。
通过底刀作为支点,刀片作为杆的一端,我们可以用较小的力量切割或割开较硬的物体。
3. 运动和健身杠杆原理也在运动和健身领域有着重要的应用。
下面列举几个例子:•弓箭:弓箭时古老的武器。
它利用弓弦作为杠杆,将拉弓的力量转化为箭的能量,实现远程攻击。
•哑铃:在健身房中,哑铃是常见的健身工具。
当我们使用哑铃进行举重运动时,杠杆原理可以帮助我们更有效地锻炼肌肉。
•跷跷板:跷跷板是儿童乐园常见的游乐设施。
通过杠杆原理,两端的人可以轻松地实现协同运动,增强协调能力和平衡能力。
4. 机械原理在工程和机械领域,杠杆原理是必须掌握的基本原理。
下面列举几个例子:•车床:车床是金属加工工程中常用的机床。
通过杠杆原理,车床可以通过手柄的操作,实现对工件的加工和切削。
•扳手:扳手是常见的修理工具。
通过扳手的设计和杠杆原理,我们可以用较小的力量扭动螺栓或螺母,实现紧固或松开。
•自行车:自行车是大家常见的交通工具。
自行车通过踩踏脚蹬,将人体的力量转化为车轮的动力,实现前进。
5. 日常生活在日常生活中,我们在很多方面都可以看到杠杆原理的应用。
下面列举几个例子:•钳子:钳子作为工具,利用其设计和杠杆原理,可以夹住物体,实现夹持和固定。
•鞋拔:鞋拔是我们常用的日常用品之一。
通过杠杆原理,鞋拔可以帮助我们轻松地将鞋子从脚上脱下。

杠杆的原理和应用课件一、杠杆的定义和基本原理•杠杆是一种简单机械,由杠杆臂、支点和作用力构成。
•杠杆臂是杠杆的一个部分,作用力作用于杠杆臂上,支点是杠杆的旋转点。
•杠杆遵循力矩平衡原理,即力矩的乘积相等。
二、杠杆的种类1. 一级杠杆•一级杠杆的支点在中间,作用力和负载力分别在支点两端。
•一级杠杆典型的例子是平衡木和秋千。
2. 二级杠杆•二级杠杆的支点在一侧,作用力和负载力分别在支点的两侧。
•二级杠杆的典型例子是推土机的杆臂。
3. 三级杠杆•三级杠杆的支点在一侧,作用力和负载力都在支点同侧。
•三级杠杆的典型例子是人体的肌肉运动。
三、杠杆的应用1. 杠杆在物理学中的应用•杠杆是物理学中一个重要的概念,广泛应用于力学、静力学等方面。
•杠杆可以通过改变杠杆臂、作用力和负载力来实现平衡或输出更大的力。
•杠杆的原理在物理学中有广泛的应用,如工程中的起重机和桥梁结构的设计。
2. 杠杆在工程中的应用•杠杆原理在工程中被广泛运用,例如桥梁、摩天大楼的建造等。
•杠杆可以通过合理设计,减小负载力对结构造成的压力,提高结构的稳定性。
•杠杆的应用能够使得工程设计更加经济、合理,提高工程的承载能力。
3. 杠杆在生活中的应用•杠杆在我们的日常生活中随处可见,例如开门、撬锁等。
•通过合理运用杠杆原理,可以轻松完成一些看似困难的任务。
•杠杆的应用使得我们的生活更加便利,提高了效率。
四、杠杆的优缺点1. 优点•杠杆可以通过合理设定杠杆臂和作用力,将小力量放大,实现更大的输出力。
•使用杠杆可以使得工程设计更加经济合理,提高结构的承载能力。
•在生活中,合理利用杠杆可以简化很多工作,提高效率。
2. 缺点•杠杆运用不当或设计不合理时,可能会导致系统失衡或者杠杆断裂等问题。
•杠杆的使用需要一定的技术和知识,不当使用可能导致事故发生。
•杠杆的应用需要考虑材料的强度和稳定性等因素,设计复杂度较高。
五、总结•杠杆是一种简单机械,可以通过改变杠杆臂和作用力的位置,实现力量的放大和平衡。


关节运动的杠杆原理
关节运动的杠杆原理是指在关节处施加力量,通过杠杆作用来产生和控制运动。
杠杆原理的基本概念是通过在支点上施加力量来实现运动。
关节是人体骨骼系统中连接两个骨头的部分,它充当着杠杆的支点。
身体的肌肉通过牵引或收缩来施加力量,从而在关节处产生运动。
在关节上,骨头被连接和支持着,这种连结通常由肌肉、韧带和其他软组织完成。
略微改变这些结构的角度,就可以改变施加在关节上的力。
当施加力量时,肌肉缩短并扩展,形成力臂和运动力。
这种力量的应用会导致在关节上旋转和移动骨头,从而让身体完成各种动作。
在关节运动中,杠杆原理的作用可以解释为力量和力臂的乘积等于负载和负载臂的乘积。
负载是指施加在关节上的外部力,负载臂是从关节中心到外部力的距离。
力量是施加在关节的肌肉收缩所产生的力,力臂是从关节中心到施加力的肌肉起点的距离。
通过改变力量臂、负载臂和力量的大小和方向,可以实现不同类型的运动。
例如,当力量臂较长且大于负载臂时,施加的力量可以产生较大的旋转力,从而使关节快速移动。
相反,当负载臂较长且大于力量臂时,施加的力量需要更大才能移动关节。
总的来说,关节运动的杠杆原理是通过调整力臂、负载臂和力
量的大小和方向,来控制身体在关节处的运动。
这种原理在人体运动中起着至关重要的作用,使我们能够完成各种动作,如走路、跑步、举重等。

关节中的杠杆原理杠杆原理是物理力学中的基本原理之一,它描述了在杠杆系统中力的平衡和作用的关系。
关节是人体骨骼系统中连接两个或多个骨头的部分,通过关节的作用可以实现人体的运动。
在关节中应用杠杆原理,可以解释关节力的平衡和身体平衡的原理。
首先,我们来探讨关节中的力的平衡问题。
在一个关节中,骨头和肌肉通过肌腱来连接。
当肌肉收缩时,通过肌腱的拉力作用于骨头上。
根据杠杆原理,力的平衡可以通过力矩的平衡来实现。
力矩是用来描述力在杠杆上的作用效果的物理量,它等于力的大小乘以力臂的长度。
力臂是指力作用点到杠杆的轴线的距离。
在关节中,肌腱的拉力作用于骨头上的力可以分解成两个分力,一个垂直于骨头的力,称为正压力,一个与骨头平行的力,称为剪切力。
当正压力和剪切力的力矩平衡时,关节中的力就达到平衡状态。
在关节中,一般会存在两个骨头,分别被肌肉通过肌腱连接。
这时,肌腱的拉力就可以看作是作用于杠杆的力,骨头则是杠杆的杆。
通过调整肌腱拉力的大小和方向,可以使得关节中的力达到平衡状态。
例如,当我们举起物体时,肌肉的收缩产生力,通过肌腱作用于关节的骨头上,使得关节能够承受物体的重力。
此外,关节中的肌腱还可以改变力的方向。
根据杠杆原理,力的方向可以通过改变力臂的方向来实现。
在关节中,肌肉收缩产生的力作用于肌腱,然后通过肌腱传递给骨头。
通过改变肌腱的拉力方向,可以改变关节中力的方向。
例如,在我们举重时,肌肉的收缩力向上作用于肌腱,然后通过肌腱传递给骨头,从而使得骨头向上运动。
除了关节中的肌腱,关节中的其他组织也可以发挥杠杆作用。
例如,关节中的韧带可以连接两个骨头,并通过杠杆作用来保护关节。
当关节受到外力冲击时,韧带会发挥杠杆作用,减轻关节的负担,从而避免或减少关节损伤。
综上所述,杠杆原理在关节中起到了重要作用。
通过调整肌腱的拉力大小和方向,关节中的力可以达到平衡状态,并实现人体的运动。
此外,关节中的其他组织如韧带也可以发挥杠杆作用,保护关节免受损伤。
人身上的杠杆
在人体生理卫生课上已经过,人身上有2021骨,其中有许多起着杠杆作用。
当然这些起杠杆作用的骨不可能自动地绕支点转动,必须受到动力的作用,这种动力自附着在它上面的肌肉。
肌肉靠坚韧的肌腱附着在骨上。
例如,肱二头肌上端肌腱附着在肩胛骨上,下端肌腱附着在桡骨上(图12-35),肱三头肌上端有肌腱分别附着在肩胛骨和肱骨上,下端附着在尺骨上。
人前臂的动作最容易看清是杠杆在工作了,它的支点在肘关节。
当肱二头肌收缩、肱三头肌松弛时,前臂向上转,引起曲肘动作;而当肱三头肌收缩、肱二头肌松弛时,前臂向下转,引起伸肘动作。
从图12-35很容易看出,前臂是个费力杠杆,但是肱二头肌只要缩短一点就可以使手移动相当大的距离。
可见,费了力,但省了距离。
图12-35
图12-36
图12-36是跑动时腿部肌肉的示意图。
为了使画面简单容易看清,右腿没有画出臀大肌、股四头肌,左腿没有画出髂腰肌、股二头肌。
当右腿向前跨步时,是右腿的髂腰肌收缩、臀大肌松弛,使右大腿抬起;股四头肌松弛,股二头肌收缩,使右膝弯曲。
这时候,左腿由于它的髂腰肌松弛、臀大肌收缩、股四头肌收缩、股二头肌松弛而伸直。
初中物理人体中的杠杆专辑讲义-word文档人体中的杠杆——手臂如图是手臂的简化图,手托住重物时,肌肉对前臂的拉力沿图中ab线.(1)在图中画出重物对手的压力;(2)画出肌肉对前臂的拉力方向;(3)画出拉力的力臂;(4)根据公式________判断肌肉对前臂的拉力________重物对手的拉力(选填“大于”、“等于”、“小于”).人体中的杠杆——低头族“低头族”长时间低头看手机,会引起颈部肌肉损伤.当头颅为竖直状态时,颈部肌肉的拉力为零,当头颅低下时,颈部肌肉会产生一定的拉力.为了研究颈部肌肉的拉力与低头角度大小的关系,我们可以建立一个头颅模型来模拟实验.如图甲所示,把人的颈椎简化成一个支点O,用1kg的头颅模型在重力作用下绕着这个支点O转动,A点为头颅模型的重心,B点为肌肉拉力的作用点.将细线的一端固定在B点,用弹簧测力计拉着细线模拟测量肌肉的拉力,头颅模型在转动过程中,细线拉力的方向始终垂直于OB,如图乙所示,让头颅模型从竖直状态开始转动,通过实验记录出低头角度θ及细线拉力F 的数据,如下表:低头角度θ/°0 15 30 45 60细线拉力F/N 0 7.3 14.0 20.2 25.0(1)设头颅质量为8kg,当低头角度为60°时,颈部肌肉实际承受的拉力是________N.(2)在图乙中画出细线拉力的示意图.(3)请解释:为什么低头角度越大,颈部肌肉的拉力会越大?答________.(4)请你就预防和延缓颈椎损伤提出一个合理化的建议:________.C.脚掌与地面接触的地方是支点,是省力杠杆;D.脚掌与地面接触的地方是支点,是费力杠杆答案:C解析:结合图片和生活经验,先判断杠杆在使用过程中,动力臂和阻力臂的大小关系,再判断它是属于哪种类型的杠杆。
如图所示,踮脚时,脚掌与地面接触的地方是支点,小腿肌肉对脚的拉力向上,从图中可知动力臂大于阻力臂,是省力杠杆。
2. 从地面上搬起重物我们的常见做法是弯腰(如图甲)或人下蹲弯曲膝盖(如图乙)把它搬起来,哪种方法好呢?下面就建立模型说明这个问题.把脊柱简化为杠杆如图丙所示,脊柱可绕骶骨(轴)O转动,腰背部复杂肌肉的等效拉力F1作用在A点,其实际作用方向与脊柱夹角为12°且保持不变.搬箱子拉力F2作用在肩关节B点,在B点挂一重物代替箱子.用测力计沿F1方向拉,使模型静止,可测出腰背部复杂肌肉拉力的大小.接着,改变脊柱与水平面的夹角即改变杠杆与水平面的夹角α,多次实验得出结论.(1)在丙图中画出F2力臂L1.(2)当α角增大时,L2________(填“变大”“不变”或“变小”),F1________(填“变大”“不变”或“变小”).(3)如果考虑到人上半身的重力,那么腰背部肌肉的实际拉力将比丙图中F1要________(填“大”或“小”).(4)对比甲、乙两种姿势所对应丙图中的两种状态,由以下分析可得,________(填“甲”或“乙”)图中的姿势比较正确.答案:(1)如图所示(2)变小变小(3)大(4)乙解析:本题考查杠杆平衡条件的应用.(1)延长F2作用线,由支点作其作用线的垂线,支点与垂线间的距离l2即是其力臂.(2)由图可知:当α角增大时,力臂l2变小;由于拉力F1的方向与脊柱夹角始终为12°,且OA这段距离不变,则O点到F1作用线的距离不变,即动力臂l1不变,阻力为箱子的重力不变,根据杠杆平衡条件F1l1=F2l2可知,F1变小.(3)由于上半身的重力会阻碍杠杆的转动,则实际拉力将变大.(4)比较甲、乙两种姿势可知:甲的支点太高,在搬起物体时,阻力臂减小得慢,则腰背部复杂肌肉的等效拉力F1减小得也慢,所以甲姿势不正确,乙姿势比较正确.。