机械原理总复习题及解答第五章
- 格式:pdf
- 大小:289.26 KB
- 文档页数:9
第5章机械的效率和自锁5.1 复习笔记一、机械的效率1.功和效率(1)机械效率①驱动功机械上的驱动功(输入功)为W d,有效功(输出功)为W r,损失功为W f。
则有W d=W r+W f②机械效率a.定义机械的输出功与输入功之比称为机械效率,反映了输入功在机械中的有效利用程度,以η表示。
b.计算方法用功计算时η=W r/W d=1-W f/W d;用功率计算时η=P r/P d=1-P f/P d;式中,P d——输入功率;P r——输出功率;P f——损失功率。
(2)损失率①定义机械的损失功与输入功之比称为损失率,以ξ表示。
②计算方法由定义有ξ=W f/W d=P f/P d。
注:η+ξ=1,由于摩擦损失不可避免,故必有ξ>0和η<1。
(3)效率的简便计算方法为便于效率的计算,可应用下式进行计算η=理想驱动力/实际驱动力=理想驱动力矩/实际驱动力矩①斜面机构正反行程的机械效率分别为η=tanα/tan(α+φ)η′=tan(α-φ)/tanα式中,α——斜面夹角;φ——总反力与法向反力的夹角。
②螺旋机构拧紧和放松螺母时的效率计算式分别为η=tanα/tan(α+φv)η′=tan(α-φv)/tanα式中,α——中径升角;φv——螺旋副的摩擦角。
2.机器(或机组)的效率已知各机构的效率可计算确定整个机构的效率。
常用机构的效率见教材表5-1。
(1)串联①计算公式由k个机器串联组成的机组,设各机器的效率分别为η1、η2、…、ηk,机组的输入功率为P d,输出功率为P r。
则整个串联机组的机械效率为η=P r/P d=(P1/P d)(P2/P1)…(P k/P k-1)=η1η2…ηk②特点a.前一机器的输出功率即为后一机器的输入功率;b.只要串联机组中任一机器的效率很低,就会使整个机组的效率极低;c.串联机器的数目越多,机械效率也越低。
③提高串联机组效率的措施a.减少串联机器的数目;b.优先提高效率最低机器的效率。
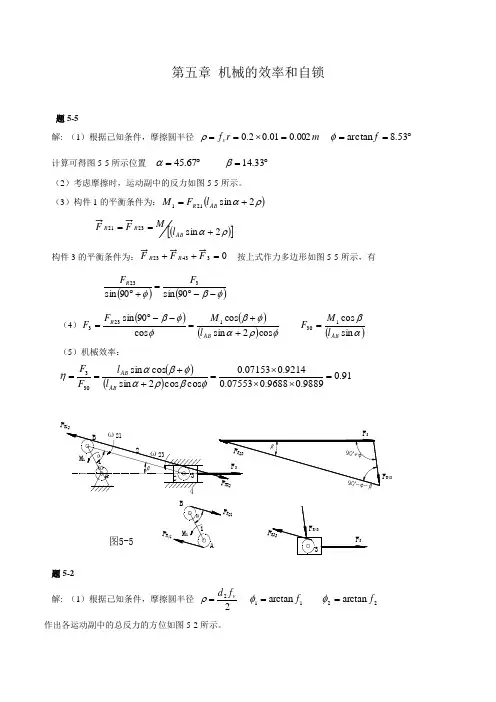
第五章 机械的效率和自锁题5-5解: (1)根据己知条件,摩擦圆半径 m r f v 002.001.02.0=⨯==ρ ︒==53.8arctan f φ 计算可得图5-5所示位置︒=67.45α ︒=33.14β (2)考虑摩擦时,运动副中的反力如图5-5所示。
(3)构件1的平衡条件为:()ρα2sin 211+=AB R l F M()[]ρα2sin 2321+==AB R R l M构件3的平衡条件为:034323=++R R 按上式作力多边形如图5-5所示,有()()φβφ--︒=+︒90sin 90sin 323F F R(4)()()()φραφβφφβcos 2sin cos cos 90sin 1233++=--︒=AB R l M F F ()αβs i n c o s 130AB l M F = (5)机械效率:()()91.09889.09688.007553.09214.007153.0cos cos 2sin cos sin 303=⨯⨯⨯=++==φβραφβαηAB AB l l F FF R 12F R 41图5-5F F R 21F R43题5-2解: (1)根据己知条件,摩擦圆半径 22vf d =ρ 11a r c t a n f =φ 22a r c t a n f =φ 作出各运动副中的总反力的方位如图5-2所示。
(2)以推杆为研究对象的平衡方程式如下:∑=0xF 0cos cos sin 232132112=''-'+φφφR RR F F F ∑=0yF0sin sin cos 232132112=''-'--φφφR RR F F G F ∑=0CM()0c o s c o s s i n c o s 2s i n 1122232232112=⋅⋅-⋅''+⋅''+++θφφφφe F d F l F d Gl b F R R R R(3)以凸轮为研究对象的平衡方程式如下:h F M R ⋅=12 ()11cos tan sin cos φφθθρe r e h +++=(4)联立以上方程解得()[]21tan cos 21tan sin cos φθφθθρle e r e G M -+++=θc o s 0Ge M = ()()120tan sin cos tan cos 21cos φθθρφθθηe r e c l e e M M +++-==讨论:由于效率计算公式可知,φ1,φ2减小,L 增大,则效率增大,由于θ是变化的,瞬时效率也是变化的。
考研机械原理复习试题(含答案)2一、正误判断题:(在括号内正确的画“√”,错误的画“×”)1.在平面机构中一个高副引入二个约束。
(×)2.任何具有确定运动的机构都是由机架加原动件再加自由度为零的杆组组成的。
(√)3.运动链要成为机构,必须使运动链中原动件数目大于或等于自由度。
(×)4.平面机构高副低代的条件是代替机构与原机构的自由度、瞬时速度和瞬时加速度必需完全相同。
(√)5.当机构自由度F>0,且等于原动件数时,该机构具有确定运动。
(√)6.若两个构件之间组成了两个导路平行的移动副,在计算自由度时应算作两个移动副。
(×)7.在平面机构中一个高副有两个自由度,引入一个约束。
(√)8.在杆组并接时,可将同一杆组上的各个外接运动副连接在同一构件上。
(×)9.任何机构都是由机架加原动件再加自由度为零的基本杆组组成。
因此基本杆组是自由度为零的运动链。
(√)10.平面低副具有2个自由度,1个约束。
(×)二、填空题1.机器中每一个制造单元体称为零件。
2.机器是在外力作用下运转的,当外力作功表现为盈功时,机器处在增速阶段,当外力作功表现为亏功时,机器处在减速阶段。
3.局部自由度虽不影响机构的运动,却减小了高副元素的磨损,所以机构中常出现局部自由度。
4.机器中每一个独立的运动单元体称为构件。
5.两构件通过面接触而构成的运动副称为低副;通过点、线接触而构成的运动副称为高副。
6.平面运动副的最大约束数为 2 ,最小约束数为1。
7.两构件之间以线接触所组成的平面运动副,称为高副,它产生2 个约束。
三、选择题1.机构中的构件是由一个或多个零件所组成,这些零件间 B 产生任何相对运动。
A.可以B.不能C.变速转动或变速移动2.基本杆组的自由度应为 C 。
A.-1B. +1C. 03.有两个平面机构的自由度都等于1,现用一个带有两铰链的运动构件将它们串成一个平面机构,则其自由度等于 B 。
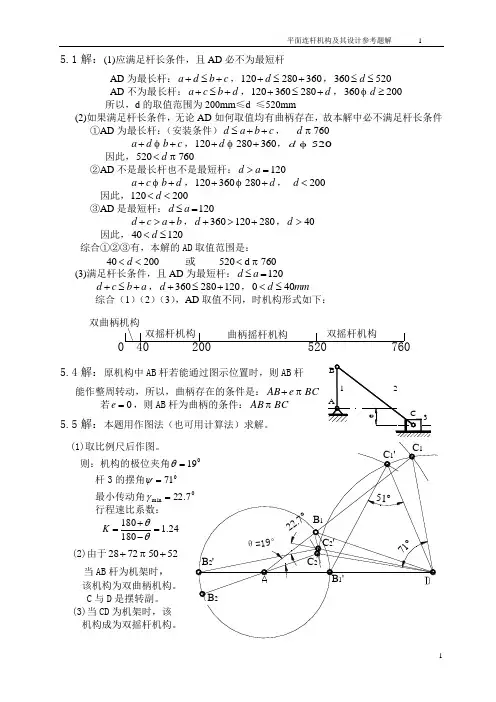
5.1解:(1)应满足杆长条件,且AD 必不为最短杆AD 为最长杆:c b d a +≤+,360280120+≤+d ,520360≤≤dAD 不为最长杆:d b c a +≤+,d +≤+280360120,200360≥d 所以,d 的取值范围为200mm ≤d ≤520mm(2)如果满足杆长条件,无论AD 如何取值均有曲柄存在,故本解中必不满足杆长条件 ①AD 为最长杆:(安装条件)c b a d ++≤, 760 dc bd a ++ ,360280120++ d ,520 d因此,760520 d <②AD 不是最长杆也不是最短杆:120=>a dd b c a ++ ,d ++280360120 , 200<d因此,200120<<d5.6解:(1)180180341.46618018034k θθ++===--(2)[]min 33γγ=<死点位置如图示。
5.15 解 1 1.251180180201 1.251k k θ--===++ (1)AC2=269.23mm ,AC1=127.95mm(2)取比例尺mm m L /002.0=μ根据已知条件可作出摇杆DC 的一个极限位置DC1,要进行图解还需找出摇杆的另一极限位置。
(3)以D 点为圆心,DC1为半径作圆弧S 。
连接AC1,作∠C1AC2=360,AC2线与圆弧S 可交于两点C2‘,则DC2(或DC2‘)皆为摇杆的另一极限位置。
(4)取摇杆的极限位置为DC1、DC2时,由图可得AC1=24,AC2=58,则1712=-=AC AC AB 412=-=AB AC BC5.8 解:分析:因为是转动导杆机构,ADP 又是对心的曲柄滑块机构,所以曲柄AD 的两个极位必在AP 线上,那么对于转动导杆机构而言,转动曲柄BC 的极位C1和C2也比在AP 线上。
(1)又因 3018011=+-=k k ϑ,两个极位的实际夹角应该是 150。

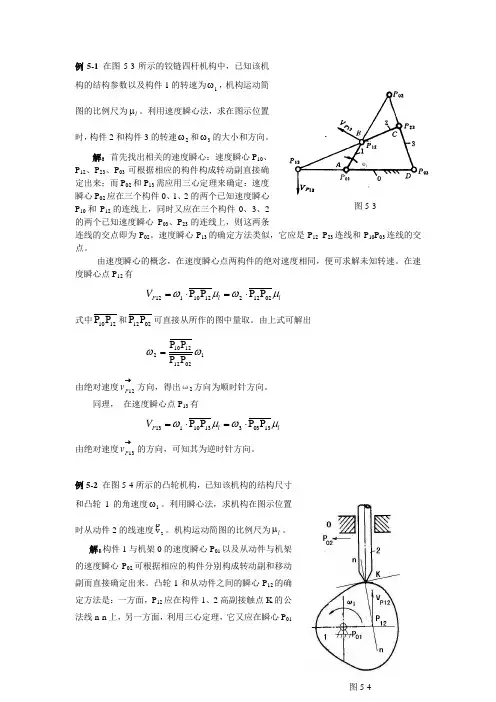
例5-1 在图5-3所示的铰链四杆机构中,已知该机构的结构参数以及构件1的转速为1ω,机构运动简图的比例尺为l μ。
利用速度瞬心法,求在图示位置时,构件2和构件3的转速2ω和3ω的大小和方向。
解:首先找出相关的速度瞬心:速度瞬心P 10、P 12、P 23、P 03可根据相应的构件构成转动副直接确定出来;而P 02和P 13需应用三心定理来确定:速度瞬心P 02应在三个构件0、1、2的两个已知速度瞬心P 10和P 12的连线上,同时又应在三个构件0、3、2的两个已知速度瞬心P 03、P 23的连线上,则这两条连线的交点即为P 02。
速度瞬心P 13的确定方法类似,它应是P 12 P 23连线和P 10P 03连线的交点。
由速度瞬心的概念,在速度瞬心点两构件的绝对速度相同,便可求解未知转速。
在速度瞬心点P 12有l l P V μωμω021*********P P P P ⋅=⋅= 式中1210P P 和0212P P 可直接从所作的图中量取。
由上式可解出1021212102P P P P ωω=由绝对速度→12P v 方向,得出ω2方向为顺时针方向。
同理, 在速度瞬心点P 13有l l P V μωμω130331310113P P P P ⋅=⋅= 由绝对速度→13P v 的方向,可知其为逆时针方向。
例5-2 在图5-4所示的凸轮机构,已知该机构的结构尺寸和凸轮1的角速度1ω。
利用瞬心法,求机构在图示位置时从动件2的线速度2v。
机构运动简图的比例尺为l μ。
解:构件1与机架0的速度瞬心P 01以及从动件与机架的速度瞬心P 02可根据相应的构件分别构成转动副和移动副而直接确定出来。
凸轮1和从动件之间的瞬心P 12的确定方法是:一方面,P 12应在构件1、2高副接触点K 的公法线n-n 上,另一方面,利用三心定理,它又应在瞬心P 01图5-4图5-3和P 02的连线上,即又应在过点P 01而垂直于从动件2与机架移动副导路的直线上。


机械原理课后全部习题解答文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征机器通常由哪三部分组成各部分的功能是什么2)、机器与机构有什么异同点3)、什么叫构件什么叫零件什么叫通用零件和专用零件试各举二个实例。
4)、设计机器时应满足哪些基本要求试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。

华东理工大学网络教育学院机械原理课程阶段练习二(第5-6章)第五章平面连杆机构及其设计一:选择题1、铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和( A )其他两杆长度之和。
A <=;B >=;C > 。
2、当行程速度变化系数k B时,机构就具有急回特性。
A <1;B >1;C =1。
3、当四杆机构处于死点位置时,机构的压力角( B ).A.为0o;B.为90o;C.与构件尺寸有关.4、对于双摇杆机构,最短构件与最长构件长度之和( A )大于其余两构件长度之和.A.一定;B.不一定;C.一定不.5、若将一曲柄摇杆机构转化为双曲柄机构,可将( B ).A.原机构曲柄为机构;B.原机构连杆为机架;C.原机构摇杆为机架.6、曲柄摇杆机构处于死点位置时( B )等于零度.A.压力角;B.传动角;C.极位角.7、偏置曲柄滑动机构中,从动件滑动的行程速度变化系数K( A )1.A.大于;B.小于;C.等于.8、曲柄为原动件的曲柄摇杆机构, 若知摇杆的行程速比系数K=1.5,那么极位角等于( C ).A.18;B.-18;C.36;D.72.9、曲柄滑块机构的死点只能发生在( B ).A.曲柄主动时;B.滑块主动时;C.连杆与曲柄共线时.10、当曲柄为主动件时,曲柄摇杆机构的最小传动角 min总是出现在( C ).A.连杆与曲柄成一条直线;B.连杆与机架成一条直线时;C.曲柄与机架成一条直线.11、四杆机构的急回特性是针对主动件作( A )而言的.A.等速运动;B.等速移动;C.与构件尺寸有关.12、平面连杆机构的行程速比系数K值的可能取值范围是( C ).A 0≤ K≤1B 0≤ K≤2C 1≤ K≤3D 1≤ K≤213、摆动导杆机构,当导杆处于极限位置时,导杆( A )与曲柄垂直.A.一定;B.不一定;C.一定不.14、曲柄为原动件的偏置曲柄滑动机构,当滑块上的传动角最小时,则( B ).A.曲柄与导路平行;B.曲柄与导路垂直;C.曲柄与连杆共线;D.曲柄与连杆垂直.15、在曲柄摇杆机构中,若增大曲柄长度,则摇杆摆角将( A )A.加大;B.减小;C.不变;D.加大或不变.16、铰链四杆机构有曲柄存在的必要条件是( A )A.最短杆与最长杆长度之和小于或等于其他两杆长度之和B.最短杆与最长杆长度之和大于其他两杆长度之和C.以最短杆为机架或以最短杆相邻的杆为机架二:填空题1、平面四杆机构有无急回特性取决于极位夹角θ的大小.2、曲柄滑快机构,当以滑块为原动件时,可能出现死点。
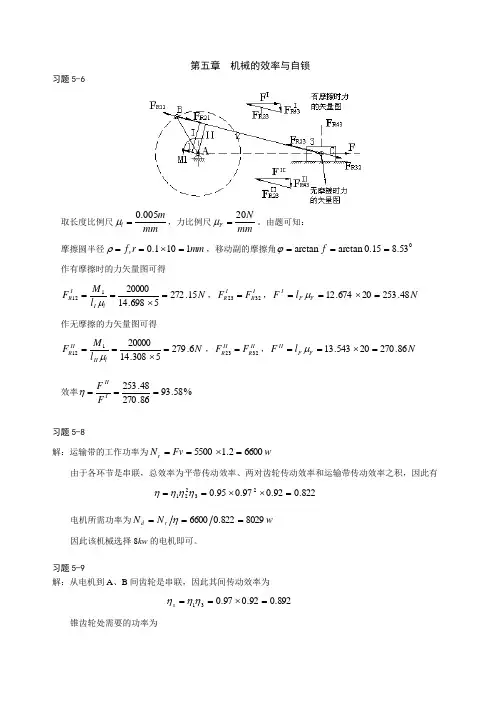
第五章 机械的效率与自锁习题5-6取长度比例尺mm m l 005.0=μ,力比例尺mmN F 20=μ。
由题可知: 摩擦圆半径mm r f v 1101.0=⨯==ρ,移动副的摩擦角053.815.0arctan arctan ===f ϕ 作有摩擦时的力矢量图可得N l M F l I I R 15.2725698.1420000112=⨯==μ,I R I R F F 3223=,N l F F F I 48.25320674.12=⨯==μ 作无摩擦的力矢量图可得N l M F l II II R 6.2795308.1420000112=⨯==μ,II R II R F F 3223=,N l F F F II 86.27020543.13=⨯==μ 效率%58.9386.27048.253===I II F F η习题5-8解:运输带的工作功率为w Fv N r 66002.15500=⨯==由于各环节是串联,总效率为平带传动效率、两对齿轮传动效率和运输带传动效率之积,因此有822.092.097.095.023221=⨯⨯==ηηηη 电机所需功率为w N N r d 8029822.06600===η因此该机械选择8kw 的电机即可。
习题5-9解:从电机到A 、B 间齿轮是串联,因此其间传动效率为892.092.097.031=⨯==ηηηs锥齿轮处需要的功率为kw P P N B BA A s 505.897.015.018.0511=⎪⎭⎫ ⎝⎛+=+=ηηηη 则电机的功率为 kw N N s s d 53.9892.0505.8===η该机械选择10kw 的电机即可。
习题5-11解:1)正行程时,对于滑块2,在三个力作用下保持平衡,因此有04212=++R R s F F F根据三解形正弦定理,有()[]()()ϕαϕαϕα-=⇒-=-sin 2cos 2sin 1212s R R s F F F F ()[]()()ϕαϕαϕα-=⇒-=--cos 2sin 2180sin 21210F F F F R R 由上两式可得()ϕα-=ctg F F s由于正行程时,力F 为驱动力,在无摩擦状态下,理想驱动力αctg F F s =0 所以效率为()αϕαηF F -==tan 0自锁条件为:ϕαη≤⇒≤02)反行程时,构件2同样三力作用下平衡,如图所示()[]()()ϕαϕαϕα+=⇒+=+sin 2cos 2sin 1212s R R s F F F F ()[]()()ϕαϕαϕα+=⇒+=+-cos 2sin 2180sin 21210F F F F R R 由上两式可得()ϕα+=ctg F F s由于反行程时,s F 为驱动力,而F 为阻力,在无摩擦状态下,理想阻力αctg F F s =0 所以效率为()ϕααη+==F F tan 0自锁条件为:0900≥+⇒≤ϕαη,而ϕα-<090时不自锁。
《机械原理》第五章习题轮系及其设计及答案-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN第五章 轮系及其设计习题5 2 在题图52所示的手摇提升装置中,已知各轮齿数为:z 120,z 250,z 315,z 430,z 640,z 718,z 851,蜗杆z 51,右旋,试求传动比i 18并确定提升重物时手柄的转向。
题图525 5 在题图55所示的压榨机中,螺杆4和5为一对旋向相反的螺杆,其螺距分别为6mm 和3mm ,螺杆5旋在螺杆4内,螺杆4与齿轮3固联在一起,螺杆5与盘B 固联在一起,盘B 插在框架两侧的槽内只能沿框架上下移动。
已知各轮齿数为z 118,z 224,z 224,z 364,试求为使盘B 下降19mm ,轴A应转多少转,转向如何答案:转!题图555-6题图5-6所示为手动起重葫芦,已知z l=z2=10,z2=20,z3=40。
设由链轮A至链轮B 的传动效率为= 0. 9,为了能提升Q =1000N的重物,求必须加在链轮A上的圆周力P。
57题图57所示为一灯具的转动装置,已知:n1min,方向如图示,各轮齿数为z160,z2z230,z3 z440,z5120。
求灯具箱体的转速及转向。
5-11 在题图5-11所示的三爪电动卡盘的传动轮系中,各轮齿数为z1=6,z2=z2=25,z3=57,z4=56,求传动比i14。
题图511512 在题图512所示的自行车里程表机构中,C为车轮轴,P为里程表指针。
已知各轮齿数为z117,z323,z419,z420,z524。
设轮胎受压变形后车轮的有效直径为0.7m,当自行车行驶1km时,表上的指针刚好回转一周。
试求齿轮2的齿数。
513 在题图513所示的双螺旋桨飞机的减速器中,已知z126,z220,z430,z518,n115000r/min,求螺旋桨P、Q的转速n P、n Q及转向。
题图513516 题图516所示的减速器中,已知蜗杆1和5的头数均为1,蜗杆1为左旋,蜗杆5为右旋,各轮齿数为z 1=101,z2=99,z 2=z4,z 4=100,z 5=100。
00901、凸轮机构中的压力角是和所夹的锐角。
00902、凸轮机构中,使凸轮与从动件保持接触的方法有和两种。
00903、在回程过程中,对凸轮机构的压力角加以限制的原因是。
00904、在推程过程中,对凸轮机构的压力角加以限制的原因是。
00905、在直动滚子从动件盘形凸轮机构中,凸轮的理论廓线与实际廓线间的关系是。
00906、凸轮机构中,从动件根据其端部结构型式,一般有、、等三种型式。
00907、设计滚子从动件盘形凸轮机构时,滚子中心的轨迹称为凸轮的廓线;与滚子相包络的凸轮廓线称为廓线。
00908、盘形凸轮的基圆半径是上距凸轮转动中心的最小向径。
00909、根据图示的dd2sϕϕ2-运动线图,可判断从动件的推程运动是_________________________________,从动件的回程运动是____________________________________________。
00910、从动件作等速运动的凸轮机构中,其位移线图是线,速度线图是线。
00911、当初步设计直动尖顶从动件盘形凸轮机构中发现有自锁现象时,可采用、、等办法来解决。
00912、在设计滚子从动件盘形凸轮轮廓曲线中,若出现时,会发生从动件运动失真现象。
此时,可采用方法避免从动件的运动失真。
00913、用图解法设计滚子从动件盘形凸轮轮廓时,在由理论轮廓曲线求实际轮廓曲线的过程中,若实际轮廓曲线出现尖点或交叉现象,则与的选择有关。
00914、在设计滚子从动件盘形凸轮机构时,选择滚子半径的条件是。
00915、在偏置直动从动件盘形凸轮机构中,当凸轮逆时针方向转动时,为减小机构压力角,应使从动件导路位置偏置于凸轮回转中心的侧。
00916、平底从动件盘形凸轮机构中,凸轮基圆半径应由来决定。
00917、凸轮的基圆半径越小,则凸轮机构的压力角越,而凸轮机构的尺寸越。
00918、凸轮基圆半径的选择,需考虑到、,以及凸轮的实际廓线是否出现变尖和失真等因素。
机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
1推证渐开线齿轮法向齿距n p 、基圆齿距b p 和分度圆齿距p 之间的关系为式为απαcos cos m p p p b n ===。
证明:根据渐开线的性质:即渐开线的发生线沿基圆滚过的长度,等于基圆上被滚过的圆弧长度有b n p p =设齿轮的齿数为z ,模数为m ,基圆半径为b r ,分度圆半径为r ,压力角为α 因为 b b r zp π2=,r zp π2= 又因为 αcos r r b = 所以 αcos p p b = 因为 m p π=所以 απαcos cos m p p p b n === 证毕。
2.用范成法加工渐开线直齿圆柱齿轮,刀具为标准齿条型刀具,其基本参数为:mm m 2=, 20=α,正常齿制。
(1) 齿坯的角速度srad5.221=ω时,欲切制齿数90=z 的标准齿轮,确定齿坯中心与刀具分度线之间的距离a 和刀具移动的线速度v ;(2) 在保持上面的a 和v 不变的情况下,将齿坯的角速度改为srad231=ω。
这样所切制出来的齿轮的齿数z 和变位系数x 各是多少?齿轮是正变位齿轮还是负变位齿轮? (3) 同样,保持a 和v 不变的情况下,将齿坯的角速度改为srad1.221=ω,所切制出来的齿轮的齿数z 和变位系数x 各是多少?最后加工的结果如何?解:(1)、由于是加工标准齿轮,齿坯中心与刀具分度线之间的距离为mm mz a 9029022=⨯==刀具移动的线速度为s mm mz v 45.22129022=⋅⨯=⋅=ω(2)、齿轮的齿数z 为922312422=⨯⨯==ωm v zOrbr ar pnp bp α变位系数x 为122922902-=⨯-=-=mmz a x因为变位系数小于零,所以齿轮是负变位齿轮。
(3)、齿轮的齿数z 为4.881.2212422=⨯⨯==ωm v z变位系数x 为8.0224.882902=⨯-=-=mmz a x因为变位系数为正,所以齿轮是正变位齿轮。
第一章机构的组成和结构1-1 试画出图示平面机构的运动简图,并计算其自由度。
F=3×3-2×4=1 F=3×3-2×4=1F=3×3-2×4=1 F=3×3-2×4=11-2 计算图示平面机构的自由度。
将其中高副化为低副。
确定机构所含杆组的数目和级别,以及机构的级别。
(机构中的原动件用圆弧箭头表示。
)F=3×7-2×10=1 F=3×7-2×10=1含3个Ⅱ级杆组:6-7,4-5,2-3。
含3个Ⅱ级杆组:6-7,4-5,2-3。
该机构为Ⅱ级机构构件2、3、4连接处为复合铰链。
该机构为Ⅱ级机构F=3×4-2×5-1=1 F=3×3-2×3-2=1F=3×5-2×7=1(高副低代后) F=3×5-2×7=1(高副低代后)含1个Ⅲ级杆组:2-3-4-5。
含2个Ⅱ级杆组: 4-5,2-3。
该机构为Ⅲ级机构构件2、3、4连接处为复合铰链。
该机构为Ⅱ级机构F=3×8-2×11-1=1 F=3×6-2×8-1=1F=3×9-2×13=1(高副低代后)F=3×7-2×10=1(高副低代后)含4个Ⅱ级杆组:8-6,5-7,4-3,2-11。
含1个Ⅱ级杆组6-7。
该机构为Ⅱ级机构含1个Ⅲ级杆组2-3-4-5。
第二章 连 杆 机 构2-1 在左下图所示凸轮机构中,已知r = 50mm ,l OA =22mm ,l AC =80mm,︒=901ϕ,凸轮1的等角速度ω1=10rad/s ,逆时针方向转动。
试用瞬心法求从动件2的角速度ω2。
解:如右图,先观察得出瞬心P 13和P 23为两个铰链中心。
再求瞬心P 12:根据三心定理,P 12应在P 13与P 23的连线上,另外根据瞬心法,P 12应在过B 点垂直于构件2的直线上,过B 点和凸轮中心O 作直线并延长,与P 13、P 23连线的交点即为P 12。
第5章 齿轮机构及其设计5.1填空题5.1.1.按标准中心距安装的渐开线直齿圆柱标准齿轮,节圆与 重合,啮合角在数值上等于 上的压力角。
5.1.2.相啮合的一对直齿圆柱齿轮的渐开线齿廓,其接触点的轨迹是一条线。
5.1.3.渐开线上任意点的法线必定与基圆5.1.4.渐开线齿轮的可分性是指渐开线齿轮中心距安装略有误差时, 。
5.1.5.共轭齿廓是指一对 的齿廓。
5.1.6.用范成法加工渐开线直齿圆柱齿轮,发生根切的原因是 。
5.1.7.一对渐开线直齿圆柱标准齿轮传动,当齿轮的模数m 增大一倍时,其重合度 ,各齿轮的齿顶圆上的压力角a α ,各齿轮的分度圆齿厚s 。
5.1.8.在模数、齿数、压力角相同的情况下,正变位齿轮与标准齿轮相比较,下列参数的变化是:齿厚 ;基圆半径 ;齿根高 。
5.1.9.一个负变位渐开线直齿圆柱齿轮同除变位系数外的其它基本参数均相同的标准齿轮相比较,其 圆及 圆变小了,而 圆及 圆的大小则没有变。
5.1.10.斜齿轮在 上具有标准数和标准压力角。
5.1.11.一对斜齿圆柱齿轮传动的重合度由 两部分组成,斜齿轮的当量齿轮是指 的直齿轮。
5. 2判断题5.2.1.一对外啮合的直齿圆柱标准齿轮,小轮的齿根厚度比大轮的齿根厚度大。
( )5.2.2.一对渐开线直齿圆柱齿轮的正确啮合条件是2b 1b p p =。
( )5.2.3.一对能正确啮合传动的渐开线直齿圆柱齿轮,其啮合角一定为20°。
( )5.2.4.一对直齿圆柱齿轮啮合传动,模数越大,重合度也越大。
( )5.2.5.一对相互啮合的直齿圆柱齿轮的安装中心距加大时,其分度圆压力角也随之加大。
( )5.2.6.标准直齿圆柱齿轮传动的实际中心距恒等于标准中心距。
( )5.2.7.渐开线直齿圆柱齿轮同一基圆的两同向渐开线为等距线。
( )5.2.8.一个渐开线圆柱外齿轮,当基圆大于齿根圆时,基圆以内部分的齿廓曲线,都不是渐开线。
( )5.2.9.对于单个齿轮来说,节圆半径就等于分度圆半径。
( )5.2.10.共轭齿廓就是一对能满足齿廓啮合基本定律的齿廓。
( )5.2.11.在渐开线齿轮传动中,齿轮与齿条传动的啮合角始终与分度圆上的压力角相等。
( )5.2.12.范成法切削渐开线齿轮时,一把模数为m 、压力角为α的刀具可以切削相同模数和压力角的任何齿数的齿轮。
( )5.2.13.一对正传动的渐开线直齿圆柱齿轮传动中,也可以有负变位齿轮。
( )5.2.14.一对渐开线直齿圆柱齿轮在无侧隙传动且中心距a m z z =+1212()时,则必定是一对标准齿轮传动。
( )5.2.15.齿数、模数分别对应相同的一对渐开线直齿圆柱齿轮传动和一对斜齿圆柱齿轮传动,后者的重合度比前者要大。
( )5.2.16.齿数少于17的正常齿制斜齿圆柱齿轮用范成法加工时,一定会发生根切。
( )5.2.17.一对斜齿圆柱齿轮啮合传动时,轮齿接触线平行于齿轮轴线。
( )5.2.18.一对能正确啮合传动的渐开线斜齿圆柱齿轮的端面模数一定相等。
( )5.2.19.斜齿圆柱齿轮不产生根切的最小齿数肯定比相同参数的直齿圆柱齿轮不产生根切的最少齿数要少。
( )5.2.20.一对外啮合斜齿圆柱齿轮正确啮合的条件是两斜齿圆柱齿轮的端面模数和压力角分别相等,螺旋角大小相等,旋向相同。
( )5.2.21.若斜齿圆柱齿轮A 比直齿圆柱齿轮B 的齿数少得多,但轮A 的法面模数、压力角与轮B 的模数、压 力角相同,则这两个齿轮还是可能用同一把齿轮滚刀加工的。
( )5.2.22.在斜齿圆柱齿轮传动中,为满足给定的中心距,只能采用移距变位法。
( )5.2.23.从端面看,渐开线斜齿圆柱齿轮传动是渐开线啮合。
( )5.2.24.斜齿圆柱齿轮法面上的齿廓曲线理论上应该是渐开线。
( )5.2.25.蜗杆的分度圆直径为d mz 1=1,蜗轮的分度圆直径为d mz 22=。
( )5.2.26.蜗轮和蜗杆轮齿的螺旋方向一定相同。
( )5.2.27.和斜齿轮相似,蜗轮的齿向也有螺旋角β,因此蜗轮的法面模数应为标准值。
( )5.2.28.自锁的蜗杆蜗轮机构中,蜗杆不能反向旋转来驱动蜗轮。
( )5.2.29.蜗轮的螺旋角β2一定等于蜗杆的螺旋升角λ 1。
( )5.2.30.蜗杆蜗轮传动中,蜗轮与蜗杆的旋向相同,且它们的螺旋角相等。
( )5.2.31.直齿圆锥齿轮机构可以传递两交错轴之间的运动和动力 。
( )5.2.32.与圆柱直齿轮一样,正常齿制的渐开线直齿圆锥齿轮的齿顶高系数,顶隙系数h *=1a c *.=025。
( ) 5.2.33.直齿圆锥齿轮背锥上的齿廓曲线是球面渐开线。
( )5. 3选择题5.3.1.已知一渐开线标准直齿圆柱齿轮,齿数z =25,齿顶高系数,顶圆直径h a *=1d a =135mm ,则其模数大小应为 。
(A )2mm ;(B )4mm ;(C )5mm ;(D )6mm 。
齿轮齿廓上的渐开线在 上的压力角、曲率半径最小。
(A )根圆;(B )基圆;(C )分度圆。
5.3.2.一对渐开线直齿圆柱齿轮的啮合线切于 。
(A )两分度圆;(B )两基圆;(C )两齿根圆。
5.3.3.一对直齿圆柱齿轮的中心距 等于两分度圆半径之和,但 等于两节圆半径之和。
(A )一定;(B )不一定;(C )一定不。
5.3.4.用标准齿条刀具加工正变位渐开线直齿圆柱外齿轮时,刀具的中线与齿轮的分度圆 。
(A )相切;(B )相割;(C )相离。
5.3.5.渐开线齿轮的标准压力角可通过测量 求得。
(A )分度圆齿厚;(B )齿距;(C )公法线长度。
5.3.6.一对渐开线直齿圆柱齿轮传动,节点附近的滑动速度 。
(A )最大;(B )最小。
5.3.7.在一对渐开线直齿圆柱齿轮传动过程中,齿廓接触处所受的法向作用力 。
(A )不断增大;(B )不断减小;(C )保持不变。
5.3.8.一对渐开线直齿圆柱齿轮传动时,如重合度等于1,这时实际啮合线的长度等于 。
(A )基圆齿距;(B )分度圆齿距;(C )节圆齿距。
5.3.9.用滚刀切制z =90,α½=°20,h a *=1的渐开线直齿圆柱齿轮,变位系数x =−2,则 。
(A )产生根切;(B )不产生根切5.3.10.渐开线斜齿圆柱齿轮分度圆上的端面压力角 法面压力角。
(A )大于; (B )小于; (C )等于。
5.3.11.斜齿圆柱齿轮基圆柱上的螺旋角βb 与分度圆上的螺旋角β相比 。
(A ) βb >β; (B ) βb =β; (C ) βb <β。
5.3.12.一对渐开线斜齿圆柱齿轮在啮合传动过程中,一对齿廓上的接触线长度是变化的。
(A) 由小到大逐渐; (B )由大到小逐渐;(C )由小到大再到小逐渐; (D )始终保持定值。
5.3.13.斜齿圆柱齿轮的模数和压力角之标准值是规定在轮齿的 。
(A )端截面中; (B )法截面中; (C )轴截面中。
5.3.14.增加斜齿轮传动的螺旋角,将引起 。
(A )重合度减小,轴向力增加; (B )重合度减小,轴向力减小;(C )重合度增加,轴向力减小; (D )重合度增加,轴向力增加。
5.3.15.用齿条型刀具加工αn an =°20,=1,β=30°的斜齿圆柱齿轮时不根切的最少齿数是h *(A )17; (B )14; (C )12; (D )26。
5.3.16.一个压力角为αn =°20的正常齿制标准斜齿轮,已知其当量齿轮的基圆半径与斜齿 轮的分度圆 半径相等, 则该斜齿轮的螺旋角β≈ 。
(四舍五入)(A )8°; (B )14°; (C )18°; (D )20°。
5.3.17.阿基米德蜗杆 上的廓线是直线, 上的廓线是阿基米德螺线。
(A )法面; (B )端面; (C )轴面。
5.3.18.在蜗杆蜗轮传动中,轮齿间的啮合是 。
(A )点接触; (B )线接触; (C )面接触。
5.3.19.蜗轮和蜗杆轮齿的螺旋方向 。
(A )一定相同; (B )一定相反; (C )既可相同,亦可相反。
5.3.20.蜗杆蜗轮传动的标准中心距a = 。
(A ))(5.021z z m +; (B ))(5.02z q m +; (C );(D )。
)(5.01z q +)(5.02z q +5.3.21.渐开线直齿圆锥齿轮的当量齿数z v = 。
(A )δcos /z ; (B ); (δ2cos /z C )。
δ3cos /z 5.4简答题5.4.1.什么是齿轮的模数?为什么齿轮的模数,压力角,齿顶高系数和顶隙系数用标准值?5.4.2.渐开线直齿圆柱齿轮的分度圆和节圆有何区别?在什么情况下,标准直齿轮的分度圆和节圆是相等的?5.4.3.为了实现定传动比传动,对齿轮的齿廓曲线有什么要求?传动连续的一对齿廓是否一定满足齿廓啮合基本定律?5.4.4.什么是啮合角?啮合角与压力角有何区别?5.4.5.一对渐开线直齿圆柱齿轮传动中齿廓之间是否有相对滑动?一般在齿廓的什么位置相对滑动较大?什么位置无相对滑动?5.4.6.任意圆上的齿厚公式对齿轮上任意圆上的齿廓都适用吗?5.4.7.与标准齿轮相比较,变位齿轮的哪些参数变了?哪些没变?5.4.8.选择变位系数时要考虑那些因素?5.4.9.试述外啮合渐开线直齿圆柱齿轮传动的传动的可分性。
5.4.10.何谓斜齿轮的当量齿轮?对于螺旋角为β,齿数为Z 的斜齿圆柱齿轮,试写出其当量齿数的表达式。
简述渐开线标准斜齿圆柱齿轮当量齿数是整数吗?5.4.11. 圆锥齿轮的标准参数和压力角在什么地方?正确啮合条件是什么?5.4.12. 何谓圆锥齿轮的当量齿轮?何为背锥?5. 5作图与计算题5.5.1. 齿廓中一条是渐开线,另一条是直线,中心距100mm ,两轮基圆半径如图5.1求:1)若r 1=40mm;r 2=20mm;β=30o ,两轮瞬时的传动比是多少?2)该对齿轮能否恒传动比传动?为什么?5.5.2已知半径为r b =30mm 的基圆所生成的两条渐开线如图5.2所示。
设r k =35mm,kk’=15mm,求:点k’的半径和压力角r k 'α'k2) 以0为圆心,r 为半径画圆交两条渐开线于点k’和k”,则弧长k’k”长多少? k '图5.1题5.5.1图图5.2 题5.5.2图5.5.3.如图5.3是一对正在啮合的标准直齿圆柱齿轮,轮1是主动轮,转向如图,试:1)在图上画出理论和实际啮合线2)量出基圆齿距3)粗估该对齿轮的模数,量出该对齿轮的啮合角和节圆半径4)画出轮2的齿廓工作段。
图5.3 题5.5.3图5.5.4.有一标准直齿圆柱齿轮与齿条传动,已知被加工齿轮毛坯角速度为s rad /1=ω,齿条刀移动线速度s mm v /60=,模数4=m ,刀具中心线与齿轮毛坯圆心的中心距。