传感器第四章基础知识
- 格式:ppt
- 大小:2.50 MB
- 文档页数:15
第四章力敏传感器教学目标:1.了解弹性敏感元件的特性和要求。
2.了解几种常用测力称重传感器的特点、3.掌握电阻应变效应及半导体的压阻效应4.了解电桥电路的作用。
5.掌握单臂、双臂和全桥测量电路的异同点。
6.理解压电式传感器的工作原理。
了解它的特点。
7.了解它们的应用。
力敏传感器是使用很广泛的一种传感器。
它是生产过程中自动化检测的重要部件。
它的种类很多,有直接将力变换为电量的如压电式、压阻式等,有经弹性敏感元件转换后再转换成电量的如电阻式、电容式和电感式等。
它主要用于两个方面:测力和称重。
本章介绍电阻应变式传感器、压阻式和压电式传感器。
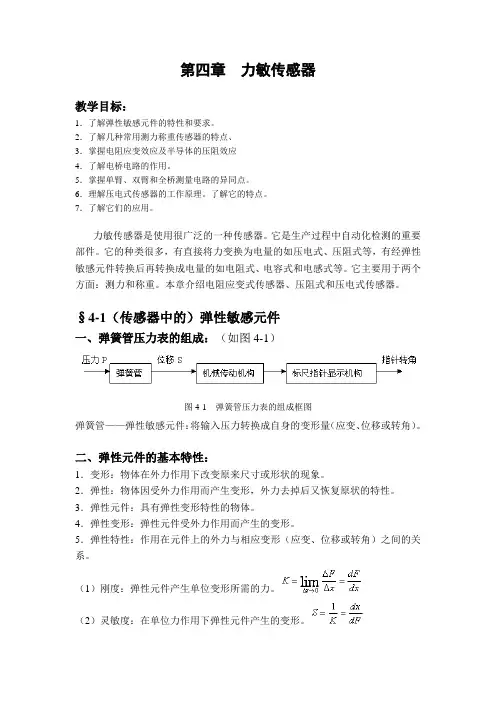
§4-1(传感器中的)弹性敏感元件一、弹簧管压力表的组成:(如图4-1)图4-1弹簧管压力表的组成框图弹簧管——弹性敏感元件:将输入压力转换成自身的变形量(应变、位移或转角)。
二、弹性元件的基本特性:1.变形:物体在外力作用下改变原来尺寸或形状的现象。
2.弹性:物体因受外力作用而产生变形,外力去掉后又恢复原状的特性。
3.弹性元件:具有弹性变形特性的物体。
4.弹性变形:弹性元件受外力作用而产生的变形。
5.弹性特性:作用在元件上的外力与相应变形(应变、位移或转角)之间的关系。
(1)刚度:弹性元件产生单位变形所需的力。
(2)灵敏度:在单位力作用下弹性元件产生的变形。
刚度和灵敏度表示了弹性元件的软硬程度。
元件越硬,刚度越大,单位力作用下变形越小,灵敏度越小。
6.线性弹性元件:刚度和灵敏度为常数,作用力F与变形X成线性关系。
三、弹性敏感元件的基本要求及类型:弹性元件在传感器技术中占有极其重要的地位。
它首先把力、力矩或压力转换成相应的应变或位移,然后配合各种形式的传感元件,将被测力、力矩或压力变换成电量。
基本要求:(1)具有良好的机械特性(强度高、抗冲击、韧性好、疲劳强度高等)和良好的机械加工及热处理性能。
(2)良好的弹性特性(弹性极限高、弹性滞后和弹性后效小等)。
(3)弹性模量的温度系数小且稳定,材料的线膨胀系数小且稳定。


测试技术传感器第四章题型小结一、选择题1. 电涡流式传感器是利用什么材料的电涡流效应工作的。
( A )PVFA. 金属导电B. 半导体C. 非金属D.22. 为消除压电传感器电缆分布电容变化对输出灵敏度的影响,可采用(B )。
A. 电压放大器B. 电荷放大器C. 前置放大器D. 电容放大器3. 磁电式绝对振动速度传感器的数学模型是一个(B )。
A. 一阶环节B. 二阶环节C. 比例环节D. 高阶环节4. 磁电式绝对振动速度传感器的测振频率应(A )其固有频率。
A. 远高于B. 远低于C. 等于D. 不一定5. 随着电缆电容的增加,压电式加速度计的输出电荷灵敏度将(C )。
A. 相应减小B. 比例增加C. 保持不变D. 不确定6. 压电式加速度计,其压电片并联时可提高(B )。
A. 电压灵敏度B. 电荷灵敏度C. 电压和电荷灵敏度D. 保持不变7. 调频式电涡流传感器的解调电路是(C )。
A. 整流电路B. 相敏检波电路C. 鉴频器D. 包络检波电路8. 压电式加速度传感器的工作频率应该(C )其固有频率。
A. 远高于B. 等于C. 远低于D. 没有要求9. 下列传感器中哪个是基于压阻效应的?( B )A. 金属应变片B. 半导体应变片C. 压敏电阻D. 磁敏电阻10. 压电式振动传感器输出电压信号与输入振动的(B )成正比。
A. 位移B. 速度C. 加速度D. 频率11. 石英晶体沿机械轴受到正应力时,则会在垂直于(B )的表面上产生电荷量。
A. 机械轴B. 电轴C. 光轴D. 晶体表面12. 石英晶体的压电系数比压电陶瓷的(C )。
A. 大得多B. 相接近C. 小得多D. 不确定13. 光敏晶体管的工作原理是基于( B )效应。
A. 外光电B. 内光电C. 光生电动势D. 光热效应14. 一般来说,物性型的传感器,其工作频率范围(A )。
A. 较宽B. 较窄C. 较高D. 不确定15. 金属丝应变片在测量构件的应变时,电阻的相对变化主要由(B )来决定的。
1.力值测量所依据的原理是力的静力效应和动力效应。
(1)力的静力效应是指弹性物体受力作用后产生相应变形的物理现象。
(2)力的动力效应是指具有一定质量的物体受到力的作用时,其动量将发生变化,从而产生相应的加速度的物理现象。
只需测出物体的加速度,就可间接测得力值。
即利用动力效应测力的特点是通过测量力传感器中质量块的加速度而间接获得力值。
2.测力传感器可以是位移型、加速度型或物性型。
按其工作原理则可以分为:弹性式、电阻应变式、电感式、电容式、压电式、压磁式等。
3.弹性变形式的力传感器:该类传感器的测量基础是弹性元件的弹性变形和作用力成正比的现象,其原则上可简化成图4.1所示的单自由度系统。
其输入力和输出弹性变形(或位移)之间的关系为:式中:c 为粘度阻尼系数;k 为弹性刚度;)(t f 为激振力,为系统的输入;z 振动位移,为系统的输出。
4.图4.2是一种用于测量压缩力的应变片式测力头的典型构造。
图4.2(b )是输出端接放大器的直流不平衡电桥的电路。
第一桥臂接电阻应变片1R ,其它三个桥臂接固定电阻。
当应变片1R 未受力时,由于没有阻值变化,电桥维持初始平衡条件3241R R R R =因而输出电压为零,即当应变片承受应力时,应变片产生1R ∆的变化,电桥处于不平衡状态,此时假设 ,,并考虑到电桥初始平衡条件及省略分母中的微量 ,则上式可写为 。
5.图4.3是测量拉压力的传感器的典型弹性元件。
为了获得较大的灵敏度,采用梁式结构。
()t f kz dt dz c dt z d m =++22()03241=⋅-⋅=R R R R A U OUT U R R R R R R R R R R U U U U DB CB CD OUT ∙⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛+∆-⋅∆=-==]11/[341211341112/R R n =11/R R ∆()1121R R n n U U OUT ∆⋅+≈6.压磁式测力传感器:某些铁磁材料(如正磁致伸缩材料)受机械力F作用后,其内部产生机械力,从而引起其磁导率(或磁阻)发生变化,这种物理现象称为“压磁效应”。