自动控制原理第九章 大学课件
- 格式:doc
- 大小:14.50 KB
- 文档页数:2
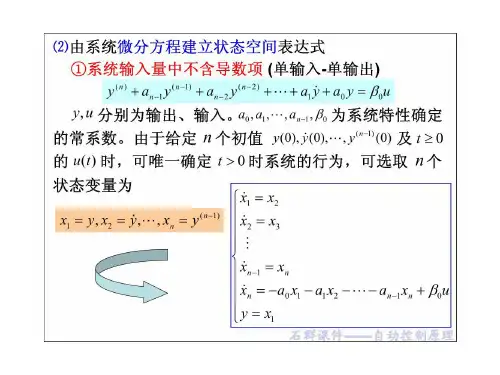
第九章 线性系统的状态空间分析与综合在第一章至第七章中,我们曾详细讲解了经典线性系统理论以及用其设计控制系统的方法。
可以看到,经典线性理论的数学基础是拉普拉斯变换和z 变换,系统的基本数学模型是线性定常高阶微分方程、线性常系数差分方程、传递函数和脉冲传递函数,主要的分析和综合方法是时域法、根轨迹法和频域法,分析的主要内容是系统运动的稳定性。
经典线性系统理论对于单输入-单输出线性定常系统的分析和综合是比较有效的,但其显著的缺点是只能揭示输入-输出间的外部特性,难以揭示系统内部的结构特性,也难以有效处理多输入-多输出系统。
在50年代蓬勃兴起的航天技术的推动下,在1960年前后开始了从经典控制理论到现代控制理论的过渡,其中一个重要标志就是卡尔曼系统地将状态空间概念引入到控制理论中来。
现代控制理论正是在引入状态和状态空间概念的基础上发展起来的。
在现代控制理论的发展中,线性系统理论首先得到研究和发展,已形成较为完整成熟的理论。
现代控制理论中的许多分支,如最优控制、最优估计与滤波、系统辨识、随机控制、自适应控制等,均以线性系统理论为基础;非线性系统理论、大系统理论等,也都不同程度地受到了线性系统理论的概念、方法和结果的影响和推动。
现代控制理论中的线性系统理论运用状态空间法描述输入-状态-输出诸变量间的因果关系,不但反映了系统的输入—输出外部特性,而且揭示了系统内部的结构特性,是一种既适用于单输入--单输出系统又适用于多输入—多输出系统,既可用于线性定常系统又可用于线性时变系统的有效分析和综合方法。
在线性系统理论中,根据所采用的数学工具及系统描述方法的不同,又出现了一些平行的分支,目前主要有线性系统的状态空间法、线性系统的几何理论、线性系统的代数理论、线性系统的多变量频域方法等。
由于状态空间法是线性系统理论中最重要和影响最广的分支,加之受篇幅限制,所以本章只介绍线性系统的状态空间法。
9-1 线性系统的状态空间描述1. 系统数学描述的两种基本类型这里所谓的系统是指由一些相互制约的部分构成的整体,它可能是一个由反馈闭合的整体,也可能是某一控制装置或受控对象。
第九章线性系统的状态空间分析与综合9-1 线性系统的状态空间描述9-2 线性系统的可控性与可观性9-3 线性定常系统的反馈结构及状态观测器9-4 李雅普诺夫稳定性分析9-5 控制系统状态空间设计9凯莱-哈密顿定理设n 阶矩阵A 的特征多项式:则A 满足其特征方程,即推论1 矩阵A 的次幂可表示为A 的n-1阶多项式:式中与A 阵的元素有关。
1110()n n n f I A a a a λλλλλ−−=−=++++ 1110()n n n f A A a A a A a I−−=++++ ()k k n ≥10 , n k mm m A A k n α−==≥∑m α9秩判据线性定常连续系统:其状态完全可控的充分必要条件是:其中,A 为n 维方阵;称为系统的可控性判别阵。
0()()(), (0), 0xt Ax t Bu t x x t =+=≥ 1n rank B AB A B n −⎡⎤=⎣⎦1 n S B AB A B −⎡⎤=⎣⎦9PBH 秩判据线性定常连续系统:其状态完全可控的充分必要条件是:式中,是矩阵A 的所有特征值。
另一种等价描述为:说明:因为这个判据是由波波夫(Popov ) 和贝尔维奇(Belevitch ) 首先提出,并由豪塔斯(Hautus ) 最先指出其可广泛应用性,故称为PBH 秩判据。
0()()(), (0), 0xt Ax t Bu t x x t =+=≥ (1,2,,)i i n λ= [] ; 1,2,,i rank I A B n i nλ−== [] ; rank sI A B n s C−=∀∈9对角线规范型判据线性定常连续系统:矩阵A 的特征值两两相异,变为对角线规范型:系统完全可控的充要条件不包含元素全为零的行12,,,n λλλ 12 0 0 n x x Bu λλλ⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎣⎦ 0()()(), (0), 0xt Ax t Bu t x x t =+=≥ B4. 输出可控性如果系统需要控制的是输出量,而不是状态,则需要研究系统的输出可控性。

第九章非线性控制系统简介 1 主要内容简介 Description Function(描述函数)Lyapunov(李亚普诺夫)稳定性分析 2 简介简介回顾非线性系统特点
研究非线性系统的意义与方法典型非线性特性的数学描述 3 简介 1. 回顾
到目前为止前面的分析与设计都是基于线性系统的.
许多实际系统在某个操作点附近都可以近似为线性系统. 但是
非线性特性问题仍然不容忽视,本章就非线性控制进行简要介绍. 4 简介 x1 t y1 t x 2 t y 2 t 2. 非线性系统特点 a1 x1 t a 2 x 2 t a1 y1 t a 2 y 2 t
非线性系统与线性控制系统相比,具有一系列新的特点 1
线性系统满足叠加原理,而非线性控制系统不满足叠加原理(指同时满足叠加性与均匀性
虽然非线性系统通过利用非线性滤波,可使系统满足叠加性(如图示),但不可能满足均匀性。
滤波器 I 非线性器件 I X1X2 Y1+Y2 滤波器 II 非线性器件 II
带滤波器的非线性系统 5 简介 2.
非线性系统特点非线性系统与线性系统相比,具有一系列新的特点:2
非线性系统的稳定性不仅取决于系统的固有结构和参数,而且与系统的初始条件以及外加输入有关系
对非线性系统而言,稳定性总是针对某一平衡点(状态)讨论的。
所谓平衡点(状态): xt f x t 设 f x t 0 求出满足的所有xe
即为非线性系统的平衡点 6 简介 2. 非线性系统特点例:对于一由非线性微分方程 x x 1 x 描述的非线性系统,显然有两个平衡点,即x10 和 x21。
将上式改写为 dx 设t=0时,系统的初态为x0。
积分上式可得 dt x 1 x x0 e t xt 1 x 0 x 0 e t xt
若初始条件x0<1,随着时间 1 t t xt0,即平衡状态x10 x0 ln 是小范围稳定的
当x0>1时, x0 1 0 在tlnx0/x0-1时, xt 这说明x21是不稳定的平衡状态。
一阶非线性系统 7 简介自激振荡(自振):没有外界周期变化信号
的作用时,系统内产生的具有固定振幅和频 2. 非线性系统特点
率的稳定周期运动。
非线性系统与线性系统相比,具有一系列新的特点: 3
非线性系统可能存在自激振荡现象(即维持等幅振荡运动)
对于二阶非线性系统,这种自激振荡状态称为极限环。
4
非线性系统在正弦信号作用下,其输出存在极其复杂的情况:
跳跃谐振和多值响应 A 2 2 3 1 . 4 4 .5 跳跃谐振与多值响应 8 简介 2.
非线性系统特点分频振荡和倍频振荡
非线性系统在正弦信号作用下,其稳态分量除产生同频率振
荡外,还可能产生倍频振荡和分频振荡。
如图所示波形。
输入信号 t倍频信号
t分频信号 t 倍频振荡与分频振荡 9 简介 3.
研究非线性系统的意义与方法研究非线性系统的意义1)实际的控制系统,存在着大量的非线性因素。
这些非线性因素的
存在,使得我们用线性系统理论进行分析时所得出的结论,与实际
系统的控制效果不一致。
线性系统理论无法解释非线性因素所产生
的影响。
2)非线性特性的存在,并非总是对系统产生不良影响。
10 简介 3.
研究非线性系统的意义与方法研究非线性系统的方法
1)相平面法是用图解的方法分析一阶,二阶非线性系统的方法。
通过绘制控制系统相轨迹,达到分析非线性系统特性的方法。
2)描述函数法是受线性系统频率分析法启发,而发展出的一种分析非线性系统的方法。
它是一种谐波线性化的分析方法,是频率法在非线性系统分析中的推广。
3)计算机求解法是利用计算机运算能力和高速度求解非线性微分方程的一种数值解法。
11 简介 3. 研究非线性系统的意义与方法常见的非线性特性:继电特性
死区特性饱和特性滞环 y y y y M k0 k0 - -a x Δ 0Δ x 0 a x x -M 死区双位
死区滞环双位间隙双位 y y y x x x 12 简介 4. 典型非线性特性的数学描述饱和特性在电子放大器中常见的一种非线性,如图所示.
x饱和装置的输入特性的数学描述如下: b k ke t et e0 -e0 e x t ke 0 signe t et
e0 e0 饱和特性 13 简介 4. 典型非线性特性的数学描述死区特性
死区特性也称为不灵敏区,大量存在各种放大器中。
其特性如图所示。
其数学描述如下: 0 et e0 xt k et e0 signet et e0 xt k et -e0 e0 死区特性 14 简介 4.
典型非线性特性的数学描述间隙特性
存在于齿轮之间。
其特性如图所示。
其数学描述如下: k et e0 xt 0 x xt k et e0 xt 0 bsignet xt 0 b k k -e0 e e0 -b 间隙 15 简介 4.
典型非线性特性的数学描述继电特性
继电特性是根据控制的需要,人为产生的一种非线性特性。
在使用继电特性时,有四种可供选择的形态。
x 1)理想继电特性 M M e 0 xt M e 0 0 e
理想的继电特性 16 简介 4. 典型非线性特性的数学描述继电特性
继电特性是根据控制的需要,人为产生的一种非线性特性。
在使用继电特性时,有四种可供选择的形态。
x2)具有死区的继电特性 M et e0 -e0 e0 et e0xt 0 e0 0 e M et e 0 具有死区的继电特性 17 简介 4. 典型非线性特性的数学描述继电特性
继电特性是根据控制的需要,人为产生的一种非线性特性。
在
使用继电特性时,有四种可供选择的形态。
3)具有磁滞回环的继电特性 x M et 0 et e0 et 0 et e0 Mxt M et 0 et e0 et 0 et e0 -e0 e0 e 0
具有滞环的继电特性 18 简介 4. 典型非线性特性的数学描述继电特性
继电特性是根据控制的需要,人为产生的一种非线性特性。
在使用继电特性时,有四种可供选择的形态。
x4)具有磁滞回环和死区的继电特性 M M e 0 e e0 e 0 e me0 -e0 -me0 e 0 e 0 me0 e e0 0 me0 e0 xt e 0 e0 e me0 M e 0 e me0 e 0 e e0
具磁滞回环和死区的继电特性 19 主要内容简介 Description Function(描述函数)Lyapunov(李亚普诺夫)稳定性分析 (20)。