平面连杆机构优化设计
- 格式:docx
- 大小:105.04 KB
- 文档页数:8
平面连杆机构及其分析与设计平面连杆机构是由连杆和连接点组成的机械结构,广泛应用于各种机械设备中。
它的功能是将输入的旋转运动转化为输出的直线运动或者将输入的直线运动转化为输出的旋转运动。
本文将对平面连杆机构的分析与设计进行介绍。
首先,对平面连杆机构进行分析。
平面连杆机构的主要组成部分是连杆和连接点。
连杆是连接点之间的刚性杆件,可以是直杆、曲杆或者具有其他特殊形状的杆件。
连接点是连杆的两个端点或者连杆与其他机构的连接点,可以是支点、铰链等。
平面连杆机构的运动可以分为三种基本类型:平动、转动和复动。
平动是指连杆的一端保持固定,另一端进行直线运动;转动是指连杆的一端保持固定,另一端进行旋转运动;复动是指连杆的一端进行直线运动,另一端同时进行旋转运动。
进行平面连杆机构的设计时,需要考虑以下几个要点。
首先,确定机构的类型和功能。
根据机构的动作要求和功能要求,选择适合的连杆类型和连接点类型。
其次,进行机构的运动分析。
根据机构的运动要求,确定连杆的长度和连接点的位置,使连杆能够实现所需的运动。
然后,进行机构的力学分析。
根据机构的受力情况,确定连杆的截面尺寸和材料,保证机构的刚度和强度。
最后,进行机构的优化设计。
考虑机构的性能要求和制造要求,对机构进行优化设计,提高机构的工作效率和使用寿命。
在平面连杆机构的设计中,还需要考虑机构的动力学问题。
机构的动力学分析包括静力学分析和动力学分析两个方面。
静力学分析是指在机构静止或静力平衡状态下,对机构受力和力矩进行分析。
动力学分析是指在机构进行运动时,对机构的加速度、速度和位移进行分析。
通过对机构的动力学分析,可以确定机构的惯性力和惯性矩,从而确定机构的动态特性和振动特性。
总之,平面连杆机构的分析与设计是一项复杂而重要的工作。
在进行分析与设计时,需要考虑机构的类型和功能,进行运动分析和力学分析,优化设计和动力学分析。
通过合理的分析与设计,可以使机构具有较好的工作性能和使用寿命,满足各种工程应用的要求。
机械原理课程教案一平面连杆机构及其分析与设计一、教学目标及基本要求1掌握平面连杆机构的基本类型,掌握其演化方法。
2,掌握平面连杆机构的运动特性,包括具有整转副和存在曲柄的条件、急回运动、机构的行程、极限位置、运动的连续性等;3.掌握平面连杆机构运动分析的方法,学会将复杂的平面连杆机构的运动分析问题转换为可用计算机解决的问题。
4.掌握连杆机构的传力特性,包括压力角和传动角、死点位置、机械增益等;正确理解自锁的概念,掌握确定自锁条件的方法。
5,了解平面连杆机构设计的基本问题,掌握根据具体设计条件及实际需要,选择合适的机构型式;学会按2~3个刚体位置设计刚体导引机构、按2~3个连架杆对应位置设计函数生成机构及按K值设计四杆机构;对机构分析与设计的现代解析法有清楚的了解。
二、教学内容及学时分配第一节概述(2学时)第二节平面连杆机构的基本特性及运动分析(4.5学时)第三节平面连杆机构的运动学尺寸设计(3.5学时)三、教学内容的重点和难点重点:1.平面四杆机构的基本型式及其演化方法。
2.平面连杆机构的运动特性,包括存在整转副的条件、从动件的急回运动及运动的连续性;平面连杆机构的传力特性,包括压力角、传动角、死点位置、机械增益。
3.平面连杆机构运动分析的瞬心法、相对运动图解法和杆组法。
4.按给定2~3个位置设计刚体导引机构,按给定的2~3个对应位置设计函数生成机构,按K值设计四杆机构。
难点:1.平面连杆机构运动分析的相对运动图解法求机构的加速度。
2.按给定连架杆的2~3个对应位置设计函数生成机构。
四、教学内容的深化与拓宽平面连杆机构的优化设计。
五、教学方式与手段及教学过程中应注意的问题充分利用多媒体教学手段,围绕教学基本要求进行教学。
在教学中应注意要求学生对基本概念的掌握,如整转副、摆转副、连杆、连架杆、曲柄、摇杆、滑块、低副运动的可逆性、压力角、传动角、极位夹角、行程速度变化系数、死点、自锁、速度影像、加速度影像、装配模式等;基本理论和方法的应用,如影像法在机构的速度分析和加速度分析中的应用、连杆机构设计的刚化一反转法等。
连杆机构的动力学分析与优化设计连杆机构是一种常见的机械传动装置,它由若干个连杆组成,通过铰链连接在一起。
连杆机构广泛应用于各个领域,如发动机、泵浦、机床等,对于实现复杂运动和力学传递起到重要的作用。
本文将对连杆机构的动力学分析与优化设计进行探讨。
一、连杆机构的动力学分析连杆机构的动力学分析是研究其运动规律和受力分布的过程。
在动力学分析中,我们可以通过构建连杆机构的运动学方程和受力方程来描述其运动和受力情况。
1. 运动学方程运动学方程描述了连杆机构中各个连杆的位置和速度之间的关系。
通过连杆机构的几何形状和运动特点,我们可以推导出各个连杆的位置和速度方程。
运动学方程的求解可以帮助我们了解连杆机构的运动规律和运动参数。
2. 受力方程受力方程描述了连杆机构中各个连杆受力的情况。
通过对各个铰链点的受力平衡条件的分析,我们可以得到连杆机构中各个连杆的受力方程。
受力方程的求解可以帮助我们了解连杆机构中各个连杆的力学特性,为优化设计提供基础。
二、连杆机构的优化设计连杆机构的优化设计旨在提高其性能和效率。
在连杆机构的优化设计中,我们可以从以下几个方面进行改进。
1. 结构优化连杆机构的结构优化包括选取合适的连杆尺寸和形状,以及确定连杆的连接方式。
通过对连杆机构结构的优化设计,可以减小其重量和体积,提高其刚度和强度,从而提高整个机构的性能。
2. 运动特性优化连杆机构的运动特性优化包括提高其运动平稳性和运动精度。
在优化设计过程中,可以通过调整连杆的长度比例和位置布局,以及选用合适的铰链点来改善连杆机构的运动特性。
运动特性优化可以使连杆机构实现更加精确和稳定的运动。
3. 动力优化连杆机构的动力优化包括提高其传动效率和降低能耗。
在优化设计过程中,可以选用合适的传动形式和传动参数,以及减小传动过程中的能量损失来改善连杆机构的动力性能。
动力优化可以提高连杆机构的整体效率,并减少对能源的消耗。
三、连杆机构的应用领域连杆机构广泛应用于各个领域,如发动机、泵浦、机床等。
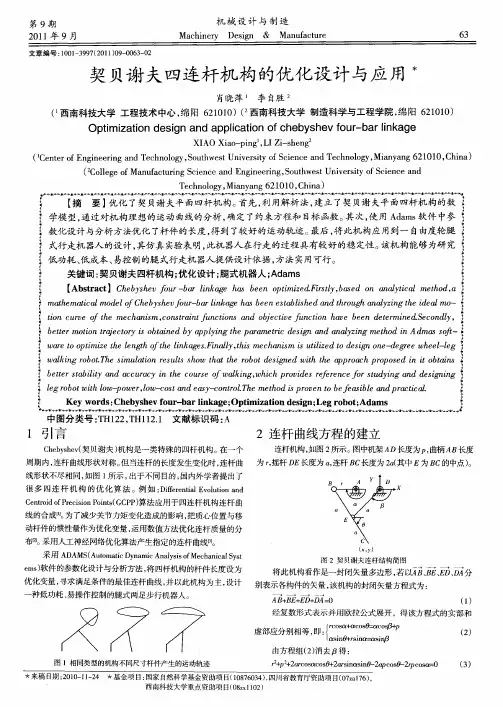
连杆机构优化设计连杆机构是最常用的机构,因此连杆机构优化设计在机构设计中十分重要,研究工作开展得也最为广泛。
有大量的文献介绍有关平面四杆机构、平面五杆机构、柔性连杆机构、曲柄连杆机构、槽轮连杆机构、凸轮连杆组合机构和齿轮连杆等机构的优化。
鉴于四连杆机构的典型性,本节结合四连杆机构的函数再现优化设计问题,阐述连杆机构优化问题的一般方法及流程。
四连杆机构的优化设计就是对四连杆机构的参量进行优化调整,使得机构给定的运动和机构所实现的运动之间误差最小。
因此四连杆机构的优化设计的过程,就是寻找使得四连杆机构运动误差最小的一组机构设计参量。
四连杆机构设计参量确定后,就可认为实现了机构的优化设计。
四连杆机构的优化设计包括四连杆机构优化模型建立和优化模型求解二个主要过程。
通过对四连杆机构的分析确定优化方案,确定设计变量,给出目标函数,并将机构设计制约条件,如杆长条件、传动角条件等,写成相应的约束条件,即可建立机构优化设计模型。
下面介绍四连杆机构函数再现优化设计模型的建立。
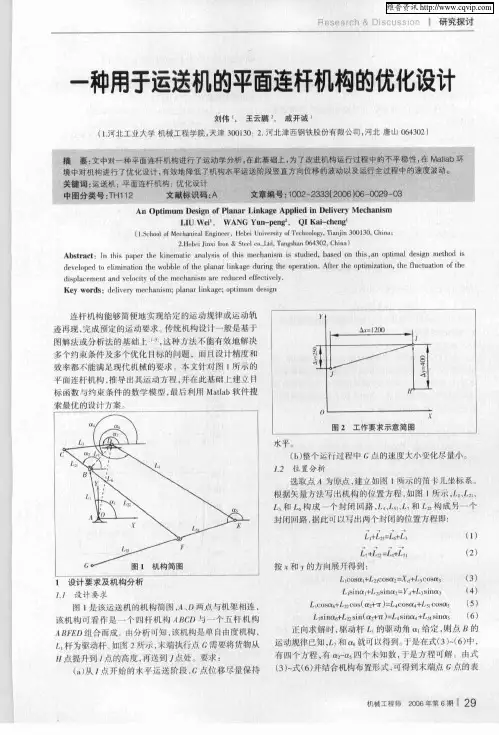
连杆机构函数再现设计主要通过选取输人构件和输出构件相对应若干位置、采用机构图解法或分析法确定机构各参数。
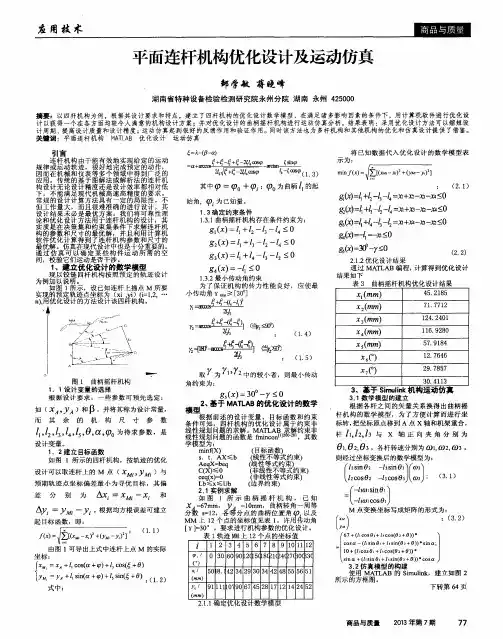
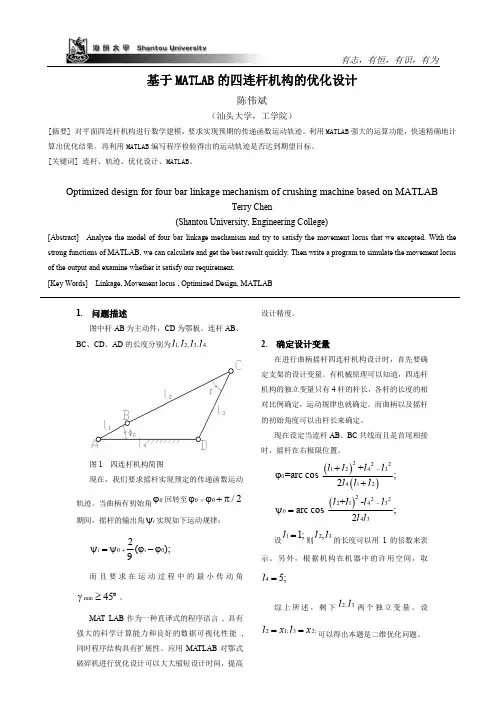
图1是典型的平面铰链四杆机构,、、和分别表示于四个构件的长度,杆AB是输入构件。
假设图1所示的平面铰链四杆机构再现给定函数为,即,则机构位置取决于、、、铰链A的位置、AD与机架x轴夹角以及输人构件转角等七个变量。
图1 平面铰链四杆机构为简化问题,可令A的位置为,,构件的长度为1(参考构件),由此可将问题维数降为四维,并不影响构件输入、输出的函数关系。
由此可以得到输出构件转角外与输入构件转角之间的函数关系式:(1)机构优化设计目标就是使得输出构件转角与给定值在,所有位置上的误差最小。
因此机构优化设计的目标函数可用下式表示(2)当输入构件转角为时,输出构件转角外可由下式求得,(3)式中:所以(4)将上式代入式(3),并令代表设计变量、、及,机构优化设计目标函数可写为:(5)机构优化设计的约束条件应根据机构设计的实际情况确定。
连杆机构的结构优化设计及其应用连杆机构的结构优化设计及其应用连杆机构是一种常见的机械传动装置,由连杆和铰链组成。
它具有结构简单、传动效率高等优点,广泛应用于各种工程领域。
为了优化设计连杆机构及其应用,我们需要按照以下步骤进行思考。
第一步是明确设计目标。
在设计连杆机构之前,我们需要明确其应用场景和要达到的目标。
例如,如果我们要设计一个用于汽车发动机的连杆机构,我们的设计目标可能包括提高发动机的功率输出和减少能量损耗。
第二步是确定系统参数。
连杆机构的设计需要考虑一系列参数,如连杆长度、铰链位置和角度等。
这些参数会直接影响机构的运动性能和传动效率。
为了确定合适的参数,我们可以通过数值模拟和实验测试来分析不同参数组合下的机构性能,并选择最优参数。
第三步是进行机构优化。
在确定了系统参数后,我们可以使用优化算法来寻找最佳设计方案。
优化算法可以通过迭代计算,不断调整参数值,以达到最小化能量损耗或最大化功率输出等优化目标。
常用的优化算法包括遗传算法、粒子群算法等。
第四步是进行材料选择和结构设计。
连杆机构的性能不仅受参数的影响,还与材料的选择和结构的设计密切相关。
在选择材料时,我们需要考虑其强度、刚度和耐磨性等因素,以确保机构在高负荷下能够正常工作。
在结构设计方面,我们可以采用优化的拓扑结构和减少不必要的零件,以提高机构的重量和成本效益。
第五步是进行性能测试和验证。
设计连杆机构后,我们需要进行实际的性能测试和验证。
通过实验测试,我们可以评估机构的运动性能、传动效率和耐久性等指标,并与设计目标进行对比。
如果测试结果与设计目标相符,说明优化设计是成功的;如果测试结果不理想,则需要再次进行设计和优化。
最后,连杆机构的应用是多样化的。
除了汽车发动机,连杆机构还广泛应用于机械工程、航空航天、电力工程等领域。
例如,在机械工程中,连杆机构可用于实现旋转运动和直线运动的转换;在航空航天领域,连杆机构可用于控制舵面和推力矢量等。
通过优化设计,连杆机构可以更好地满足不同领域的需求,提高机械的性能和效率。
平面连杆机构优化设计
一、问题描述
平面连杆机构是由所有构件均由低副连接而成的机构,四杆机构是最常用的平面连杆机构。
一般情况下,四杆机构只能近似实现给定的运动规律或运动轨迹,精确设计较为复杂。
在四杆机构中,若两连架杆中的一个是曲柄,另一个是摇杆,则该机构为曲柄摇杆机构。
曲柄摇杆机构可将曲柄的连续转动转变为摇杆的往复摆动。
设计一曲柄摇杆机构(如图1所示)。
已知曲柄长度l 1=100mm ,机架长度l 4=500mm 。
摇杆处于右极限位置时,曲柄与机架的夹角为φ0,摇杆与机架的夹角为ψ0。
在曲柄转角φ从φ0匀速增至φ0+90°的过程中,要求摇杆转角()200π
32
ϕϕψψ-+
=。
为防止从动件卡死,连杆与摇杆的夹角γ只允许在45°~135°范围内变化。
图1 机构运动简图
二、基本思路
四杆机构的设计要求可归纳为三类,即满足预定的连杆位置要求、满足预定的运动规律要求、满足预定的轨迹要求。
本案例中,要求曲柄作等速转动时,摇杆的转角满足预定运动规律()00E π
32
ϕϕψψ-+
=。
优化设计时,通常无精确解,一般采用数值方法得到近似解。
本案例将机构预定的运动规律与实际运动规律观测量之间的偏差最小设为目标,由此建立优化设计数学模型,并运用MATLAB 优化工具箱的相关函数进行求解。
三、要点分析
优化设计数学模型的三要素包括设计变量、目标函数和约束条件。
依次确定三要素后,编写程序进行计算。
1.设计变量的确定
通常将机构中的各杆长度,以及摇杆按预定运动规律运动时,曲柄所处的初始位置角φ0列为设计变量,即
T
04321T 54321)()(ϕl l l l x x x x x ==X (1)
考虑到机构各杆长按比例变化时,不会改变其运动规律,因此在计算可取l 1为单位长度,而其他杆长则按比例取为l 1的倍数。
若曲柄的初始位置对应摇杆的右极限位置,则φ0及ψ0均为杆长的函数,即
4
212
32
42210)(2)(cos arc l l l l l l l +-++=ϕ (2)
4
32
32
422102)(cos arc l l l l l l --+=ψ (3)
因此,设计变量缩减为3个独立变量,即
T
432T 321)()(l l l x x x ==X (4)
2.目标函数的建立
以机构预定的运动规律观测量ψE i 与实际运动规律观测量ψi 之间的偏差平方和最小为指标来建立目标函数,即
min )()(12E →-=∑=m
i i i f ψψX (5)
式中,m 为输入角的等分数;ψE i 为预期输出角,ψE i=ψE (φi );ψi 为实际输出角。
由图2可知:
⎩⎨
⎧<≤+-<≤--=)
π2π(π)
π0(πi i i i i i i ϕβαϕβαψ (6)
32
22322arccos l l l i i i ρρα-+= (7)
42
12422arccos l l l i i i ρρβ-+= (8)
i i l l l l ϕρcos 2412421-+= (9)
(a) 0≤φi <π (b) π≤φi <2π
图2 曲柄摇杆机构的运动学关系
3. 约束条件的确定
(1) 曲柄摇杆机构应满足曲柄存在条件,可得
0)(211≤-=l l g X (10)
0)(312≤-=l l g X (11) 0)(413≤-=l l g X (12) 0)(32414≤--+=l l l l g X (13) 0)(43215≤--+=l l l l g X (14) 0)(42316≤--+=l l l l g X (15)
(2) 连杆与摇杆的夹角应在γmin 和γmax 之间,即
02)(arccos )(max 322
4232271≤-+-+=γl l l l l l g X (16)
02)(arccos )(3
22
12322min 84≤--+-=l l l l l l g γX (17)
四、具体步骤
1. 选择设计变量
已知l 1=100mm ,l 4=500mm ,且φ0和ψ0不是独立参数,它们可由下式(2)、式(3)求出,即
)100(1000250000)100(cos
arc 22
3220l l l +-++=ϕ 3
2
32201000250000)100(cos
arc l l l --+=ψ
所以该问题只有两个独立参数l 2和l 3,故设计向量为
T 32T 21)()(l l x x ==X
2. 建立目标函数
将输入角分成30等分,并依次取30个观测点ψ1, ψ2, ..., ψ30,得目标函数
∑=-=30
12E )()(i i i f ψψX
式中:i i i βαψ--=π
2
2
12
2232223222arccos x r x x r l r l l r i i i i i -+=
-+=α i i i i i r r l r l l r 1000240000
arccos
2arccos 24212
42+=-+=β i
i i l l l l r ϕϕcos 100000260000cos 2412
421-=-+=
()200E π
32
ϕϕψψ-+
=i i 3. 确定约束条件
约束函数按曲柄存在条件及对传动角的限制来建立,得
0100)(11≤-=x g X
0100)(22≤-=x g X
0600)(213≤--=x x g X
400)(214≤--=x x g X
0400)(125≤--=x x g X
160000414.1)(212
2216≤--+=x x x x g X
0414.1360000)(212
2217≤---=x x x x g X
4. MATLAB 程序及优化结果
这是一个具有2个设计变量、7个不等式约束条件的优化设计问题。
应用MATLAB 软件的优化工具箱的fmincon 函数对上述优化问题求解。
(1) 编写m 文件Objfun.m 定义目标函数。
function f=objfun(x) l1=100; l4=500;
th0=acos(((100+x(1))^2-x(2)^2+250000)/(1000*(100+x(1)))); ps0=acos(((100+x(1))^2-x(2)^2-250000)/(1000*x(2))); f=0;
for th=th0:pi/2/30:th0+pi/2
r=(10000+250000-2*100*500*cos(th))^0.5;
a=acos((r^2+x(2)^2-x(1)^2)/(2*r*x(2))); b=acos((r^2+240000)/(1000*r));
ps=pi-a-b;
pse=ps0+2/(3*pi)*(th-th0)^2;
f=f+(ps-pse)^2;
end
(2) 编写m文件confun.m定义约束。
function [c,ceq]=confun(x)
c(1)=100-x(1);
c(2)=100-x(2);
c(3)= 600-x(1)-x(2);
c(4)= x(1)-x(2)-400;
c(5)= x(2)-x(1)-400;
c(6)= x(1)^2+x(2)^2-1.414*x(1)*x(2)-160000;c(7)= 360000-x(1)^2-x(2)^2-1.414*x(1)*x(2);ceq=[];
(3) 编写m文件run.m求解计算。
x0=[400 400];
options=optimset('LargeScale','off');
[x,fval]=fmincon(@objfun,x0,[],[],[],[],[],[],@confun)
(4) 运行m文件run.m,得最优解X*=(412.8926mm, 232.2417mm),f(X *)=0.0076 mm2。
五、问题拓展
满足预定运动轨迹的优化设计,要求机构在运行过程中,连杆上的某点(分析点)尽可能沿着给定的曲线运动。
设计时,连杆分析点坐标可由机构杆长和夹角表示。
以分析点的预定轨迹观测点坐标值与实际轨迹观测点坐标值之间的偏差平和最小为指标来建立目标函数,并列出传动角要求、曲柄存在条件以及杆长尺寸限制等约束条件。