四轴飞行器毕业设计论文
- 格式:docx
- 大小:380.39 KB
- 文档页数:40
四轴飞行器定速巡航系统设计[摘要] 四轴飞行器作为低空低成本的遥感平台,在各个领域应用广泛。
相比其他类型的飞行器,四轴飞行器硬件结构简单紧凑,而软件复杂。
本文介绍四轴飞行器的一个实现方案,重点讲软件算法,包括加速度计校正、姿态计算和姿态控制三部分。
校正加速度计采用最小二乘法。
计算姿态采用姿态插值法、梯度下降法或互补滤波法,需要对比这三种方法然后选出一种来应用。
控制姿态采用欧拉角控制或四元数控制。
最后比较各种方法的效果,并附上C语言的算法实现代码。
[关键词] 四轴飞行器;姿态;控制Four aircraft cruise control system design[Abstract] Quadcopter is a low-cost low altitude remote sensing platforms,Which widely used in various pared to other types of aircraft,the quadcopter has simpler hardware,result in more complex software.This paper describes an implementation of the quadcopter,including the calibration of accelerometer,estimation of attitude,and controlof attitude.It used the Least Squares Method to calibration the accelerometer.It uses Attitude Interpolation Method,Gradient Descent Method or Complementary Filter Method to estimation attitude.It uses Euler angles or quaternion to control the attitude.Finally,there are comparisons of the methods.The C-language implementation of the methods is appended.[Key words] Quadcopter;Attitude;Control目录1. 引言 (4)2. 飞行器的构成 (4)2.1硬件构成 (4)2.1.1机械构成 (4)2.1.2电气构成 (5)2.2软件构成 (7)2.2.1.上位机 (7)2.2.2. 下位机 (7)3. 飞行器原理 (7)3.1.坐标系统 (7)3.2. 姿态的表示和运算 (8)3.3.动力学原理 (9)4. 姿态测量 (10)4.1.传感器校正 (10)4.1.1.陀螺仪 (10)4.1.2.加速度计和电子罗盘 (10)4.2.数据融合 (11)4.2.1.概述 (11)4.2.2.姿态插值法 (11)4.2.3.梯度下降法 (12)4.2.4.互补滤波法 (13)5.姿态控制 (14)5.1欧拉角控制 (14)5.2.四元数控制 (15)6. 算法效果 (15)6.1加速度计校正 (15)6.2姿态计算 (15)7. 结论及存在的问题 (16)参考文献: (17)1.引言四轴飞行器最开始是由军方研发的一种新式飞行器。
目录第一部分设计任务与调研 (1)1研究背景 (1)2毕业设计的主要任务 (1)第二部分设计说明 (2)1理论分析 (2)2设计方案 (6)2.1 微控制器的选择 (6)2.2 无线模块的选择 (7)2.3 其他模块图片 (9)第三部分设计成果 (10)第四部分结束语 (11)第五部分致谢 (12)第六部分参考文献 (13)第一部分设计任务与调研1研究背景四轴飞行器具备VTOL(Vertical Take-Off and Landing,垂直起降)飞行器的所有优点,又具备无人机的造价低、可重复性强以及事故代价低等特点,具有广阔的应用前景。
可应用于军事上的地面战场侦察和监视,获取不易获取的情报。
能够执行禁飞区巡逻和近距离空中支持等特殊任务,可应对现代电子战、实现通信中继等现代战争模式。
在民用方面可用于灾后搜救、城市交通巡逻与目标跟踪等诸多方面。
工业上可以用在安全巡检,大型化工现场、高压输电线、水坝、大桥和地震后山区等人工不容易到达空间进行安全任务检查与搜救工作,能够对执行区域进行航拍和成图等。
因此,四轴飞行器的研究意义重大。
2毕业设计的主要任务本设计基于Arduino平台的四轴飞行器,包括Arduino最小系统、传感器模块、供电模块、电机驱动模块、蓝牙通讯模块等部分组成。
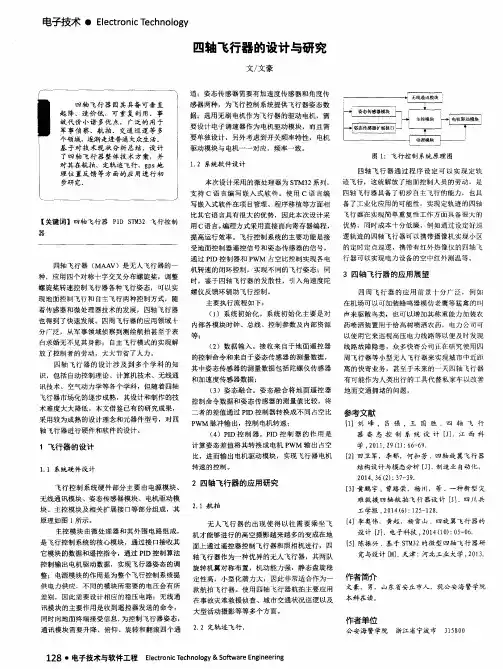
通过Arduino最小系统采集各传感器模块的数据并进行分析,将处理结果送入电机驱动模块进行姿态调整,实现四轴平稳飞行,系统框图如下:图1 系统框图第二部分设计说明1理论分析设计一个基于Arduino开源硬件平台的最小系统板,采集传感器的数据,传递给主芯片,芯片通过具体算法得出数据调整翼动部分实现水平。
下面将分析一种常见的四轴飞行器姿态解算方法,Mahony的互补滤波法。
此法简单有效,先定义Kp,Ki,以及halfT 。
Kp,Ki,控制加速度计修正陀螺仪积分姿态的速度halfT ,姿态解算时间的一半。
此处解算姿态速度为500HZ,因此halfT 为0.001#define Kp 2.0f#define Ki 0.002f#define halfT 0.001f初始化四元数float q0 = 1, q1 = 0, q2 = 0, q3 = 0;定义姿态解算误差的积分float exInt = 0, eyInt = 0, ezInt = 0;以下为姿态解算函数。
密级:NANCHANG UNIVERSITY学士学位论文THESIS OF BACHELOR(2011—2015年)题目:四轴飞行器的GPS导航系统设计学院:信息工程学院系自动化系专业班级:测控技术与仪器学生姓名:程浩学号:5801211090 指导教师:张宇职称:讲师起讫日期:2015年3月15日至2015年5月29日南昌大学学士学位论文原创性申明本人郑重申明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果。
对本文的研究作出重要贡献的个人和集体,均已在文中以明确方式表明。
本人完全意识到本申明的法律后果由本人承担。
作者签名:日期:学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权南昌大学可以将本论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
保密□,在年解密后适用本授权书。
本学位论文属于不保密□。
(请在以上相应方框内打“√”)作者签名:日期:导师签名:日期:目录摘要 (1)第一章绪论 (3)1.1 四轴飞行器定义 (3)1.2 国内外研究现状及发展趋势 (3)第二章四轴飞行器GPS导航模块分析实现设计 (5)2.1 GPS导航系统整体实现程序流程图 (5)2.2 GPS导航系统实现方向框图 (5)2.3 GPS导航模块介绍 (6)2.4 GPS导航模块协议信息接收分析设计 (6)2.5 GPS导航模块协议信息提取设计 (10)2.6 LCD12864液晶显示设计 (10)2.7 按键响应设计 (10)第三章四轴飞行器GPS导航模块硬件设计 (11)3.1 最小系统硬件设计 (11)3.1.1 单片机STC89C52 (11)3.1.2 单片机晶振部分 (12)3.1.3 单片机复位部分 (13)3.1.4 电源模块部分 (13)3.1.5 轻触按键控制部分 (14)3.2 12864液晶显示硬件设计 (14)3.3 GPS导航模块硬件设计 (16)第四章结束语 (18)4.1 展望 (18)4.2 小结与体会 (18)参考文献 (19)附录 (20)四轴飞行器的GPS导航系统设计专业:测控技术与仪器学号:5801211090学生姓名:程浩指导教师:张宇摘要在四轴飞行器诞生之前,如某地发生灾害,救援人员到达现场路途艰辛,派无人机探路虽可以节省时间成本很高,动辄几十万。
2014届毕业设计(论文)题目小型四旋翼飞行器控制系统设计与实现专业班级2010电气工程及其自动化02 学号1004150213姓名孔令上指导教师文小玲教授学院名称电气信息学院2014 年 5 月30日小型四旋翼飞行器控制系统设计与实现Design andImplementation of Control SystemforAQuadrotorUA V学生姓名: 孔令上指导教师: 文小玲教授摘要四旋翼飞行器是一种能够垂直起降的多旋翼飞行器,它非常适合近地侦察、监视、航拍、农业播撒任务。
国外某些科技公司,如亚马逊,正在开发研究利用多旋翼飞行器进行快递投送等自动化的物流业务,可见其具有广泛的军事和民事应用前景。
但是四旋翼飞行器控制难度较大,难点在于飞行器具有欠驱动、多变量、非线性等比较复杂的特性。
因此四旋翼飞行器的建模与控制也成了控制领域的热点和难点。
四旋翼飞行器有各种的运行状态,比如:爬升、下降、悬停、滚转运动、俯仰运动、偏航运动等。
本文采用牛顿-欧拉模型来描述四旋翼飞行器的飞行姿态。
本文限于作者能力未对四旋翼飞行器的机架结构和动力学特性做详尽的分析和研究,而是一定程度上简化了四旋翼飞行器的数学模型,在一定姿态角度内近似将其看作线性系统,以方便使用PID控制算法对飞行器在空中的三个欧拉角进行控制。
本文提出了四旋翼飞行器的系统设计方案,设计了四旋翼飞行器的机械结构,对其进行了模块化设计,按照功能分别设计了姿态检测单元、姿态控制单元和执行单元三个模块。
参考国际上四旋翼开源项目,基于AVR8位单片机Atmega328p、MPU6050IMU模块进行了硬件选型、电路设计与制作、软件代码的编写及调试。
最终实现较好的控制结果。
关键词:Atmega328p;MPU6050IMU模块;PID控制;IIC总线;C语言AbstractThe quad-rotor is a VTOL multi-rotor aircraft. It is very fit for the usage ofreconnaissancemission , monitoring task ,aerial photographing and sowingnear-Earth.What`s more exciting that some foreign technology company,such as ,is developing the way to deliver commodity via QuadrotorUA V ,so it can be known that QuadrotorUA V will be used in widerange of military and civilian applications. The quad-rotor is under-actuated,multivariable, strongly coupled, nonlinear, and uncertainties complex features system.The modeling and controlling have become a hot and difficulty in thecontrol field.A novel system design of Quadrotor is presented to solve the attitude control problem for aQuardrotor UA V. The novel design divided the system into three modules: attitude detection、stability control and actuator module. Referencing to many open source projects regarding Quadrotor UAV aroundthe world, Atmega328p singlechip、MPU6050IMU is chosen here, then design the circuit Schematic and makes PCB,write and debug code.After these endeavor,testing results show the good performance of each unit .Keywords:Atmega328p;MPU6050IMU;PID;IIC bus;C languageI目录摘要 (I)Abstract ..................................................... I I 第一章绪论. (1)1.1 研究背景 (1)1.2 四旋翼飞行器的研究现状 (2)1.3 四轴飞行器飞行原理 (4)第二章飞行器硬件设计 (6)2.1 硬件总体设计框图 (6)2.2 器件选型 (7)第三章飞行器软件设计 (11)3.1 软件总体设计框图 (11)3.2 初始化模块 (11)3.3 遥控接收模块的PPM解码 (12)3.4 电机驱动模块 (14)3.5 传感器数据采集模块 (16)3.6 姿态解算模块 (19)3.7信息综合与决策控制模块 (23)第四章系统调试与实验 (30)4.1 PPM解码调试 (30)4.2 电机驱动PWM波形调试 (30)4.3 姿态解算实验 (31)4.4 整机测试 (31)第五章总结 (33)致谢 (34)参考文献 (35)附录 (37)第一章绪论1.1 研究背景四旋翼飞行器与普通旋翼飞行器相比,具有结构简单、故障率低和单位体积能够产生更大的升力等优点;而且四旋翼飞行器非常远在狭小的空间内执行任务。
基于单片机的四轴飞行器设计Abstract:This paper presents the design and implementation of a quadrotor based on a microcontroller. The objective of this project is to build a quadrotor platform that can be used for various applications. The quadrotor is equipped with a microcontroller to perform flight control and sensor data acquisition. A range of sensors including IMU, barometer, and GPS are employed to improve the flight stability and precision. The software is developed in C language on an open-source platform, which is easy to modify and extend. Various experiments and performance evaluations are conducted to verify the stability, reliability, and versatility of the quadrotor.Keywords: quadrotor, microcontroller, flight control, sensor, stabilityIntroduction:Quadrotors, also known as quadcopters or drones, have gained increasing attention in various applications such as aerial photography, surveillance, and transportation. A quadrotor is a rotary-wing aircraft that employs four rotors arranged in a cross configuration to generate lift and maneuverability. With the advancement of microcontroller technology, quadrotors can now be designed and implemented using a small-scale microcontroller such as STM32, Arduino, and Raspberry Pi. Microcontrollers provide a convenient and efficient way to perform real-time flight control and sensor data acquisition. In this paper, we present the design andimplementation of a quadrotor based on a microcontroller.System Design:The quadrotor system consists of four identicalpropulsion units, a frame, a microcontroller, a battery, and several sensors. Each propulsion unit consists of a motor, an electronic speed controller (ESC), and a propeller. The frame is made of carbon fiber to minimize the weight and improvethe strength. The microcontroller used in this design isSTM32F407, which has sufficient processing power and memoryto perform real-time flight control and sensor data acquisition. The battery used in the system is a LiPo battery with a capacity of 3000mAh to provide sufficient power forthe quadrotor. A range of sensors including IMU, barometer, and GPS are employed to improve the flight stability and precision. The IMU is used to measure the orientation and acceleration of the quadrotor, while the barometer is used to measure the altitude. The GPS is used to provide location information for the quadrotor.Flight Control:The flight control of the quadrotor is performed by the microcontroller using a proportional-integral-derivative (PID) algorithm. The PID algorithm is used to control the pitch, roll, yaw, and altitude of the quadrotor. The pitch, roll,and yaw are controlled by varying the speeds of the four motors, while the altitude is controlled by varying thethrust of the four motors. The sensor data is acquired by the microcontroller at a sampling rate of 100Hz. The sensor datais processed by the PID algorithm and the control signals are sent to the ESCs to adjust the speed of the four motors. The PID algorithm is tuned using a trial-and-error method to achieve stable and precise flight control.Software:The software used in this design is developed in C language on an open-source platform. The software consists of three main modules: flight control, sensor data acquisition, and communication. The flight control module performs the PID algorithm to control the quadrotor, while the sensor data acquisition module reads and processes the data from the sensors. The communication module is used to transmit the sensor data and control signals to a ground station. The software is designed to be flexible and easily modified to accommodate different sensors and algorithms.Experiments and Performance Evaluations:Various experiments and performance evaluations are conducted to verify the stability, reliability, andversatility of the quadrotor. The quadrotor is tested in both indoor and outdoor environments to evaluate the flightstability and precision. The GPS is tested to verify the accuracy of the location information. The results show thatthe quadrotor is capable of stable and precise flight control and the GPS provides accurate location information.Conclusion:In this paper, we have presented the design and implementation of a quadrotor based on a microcontroller. The system consists of four propulsion units, a frame, a microcontroller, a battery, and several sensors. The microcontroller performs real-time flight control and sensor data acquisition using a PID algorithm. The software is developed in C language on an open-source platform, which is easy to modify and extend. Various experiments andperformance evaluations are conducted to verify the stability, reliability, and versatility of the quadrotor. The resultsshow that the quadrotor is capable of stable and precise flight control and can be used for various applications.。

四旋翼飞行器的稳定悬停与飞行设计论文四旋翼飞行器的稳定悬停与飞行设计论文四旋翼飞行器的研究解决了众多的军用与民用上的问题。
下面由学术堂为大家整理出一篇题目为“四旋翼飞行器的稳定悬停与飞行设计”的航天工程论文,供大家参考。
原标题:四旋翼控制系统的设计摘要:在充分考虑四旋翼飞行器功能及性能的基础上,给出了微型四旋翼飞行器的实现方案,采用RL78G13为核心处理器,采用MPU6050实现飞行姿态数据的采集,利用nRF24L01无线模块实现参数的无线传输,并进行了驱动电路、电源稳压电路、电池电压检测电路的设计。
针对四旋翼飞行器在工作过程中供电电压不断降低导致控制不稳的问题,采用电池电压反馈的控制策略有效解决了该问题。
在搭建的硬件平台上,编写了相应的控制程序,经过测试,实现了四旋翼飞行器的稳定控制。
关键词:四旋翼飞行器;姿态数据;无线传输四旋翼飞行器的研究解决了众多的军用与民用上的问题。
军方利用四旋翼飞行器进行侦查、监视、诱饵与通信中继,解决了人为操作困难的问题,甚至减免了人员的伤亡;而在民用上,四旋翼飞行器能够实现大气监测、交通监控、森林防火等功能,有效预防了危机的产生,而促使四旋翼飞行器得到广泛应用的前提,是实现其平稳飞行及自主运行[1].本设计以实现四旋翼飞行器的稳定悬停与按照预定轨道自主飞行为目标,旨在探索四旋翼飞行器的硬件结构与飞行原理,并通过实际调试,理解四旋翼飞行器的相关控制理论,并解决四旋翼飞行器在工作过程中由于供电电压不断降低导致控制不稳的问题。
1设计原理方案四旋翼飞行器的核心是利用MPU6050对其飞行过程中的三轴加速度与三轴角速度值进行采集,主控制器采用四元数方法及PID算法对姿态数据进行解算,并将计算后的PWM控制信号施加到电机上,进而实现对四旋翼飞行器的控制。
通过调研及综合目前四旋翼飞行器系统的特点及要求,确定了设计的性能及指标如下。
(1)通信功能:具有无线接口,实现飞行功能的无线设定。
基于单片机的四轴飞行器毕业设计目录摘要 ................................................................................................ 错误!未定义书签。
ABSTRACT ..................................................................................... 错误!未定义书签。
第1章绪论 .. (1)1.1 论文研究背景及意义 (1)1.2 国内外的发展情况 (2)1.3 本文主要研究内容 (4)第2章总体方案设计 (5)2.1 总体设计原理 (5)2.2 总体设计方案 (5)2.2.1 系统硬件电路设计方案 (5)2.2.2 各部分功能作用 (6)2.2.3 系统软件设计方案 (7)第3章系统硬件电路设计 (8)3.1 Altium Designer Summer 09简介 (8)3.2 总体电路设计 (8)3.2.1 遥控器总体电路设计 (8)3.2.2 飞行器总体电路设计 (10)3.3 各部分电路设计 (10)3.3.1 电源电路设计 (10)3.3.2 主控单元电路设计 (12)3.3.3 无线通信模块电路设计 (13)3.3.4 惯性测量单元电路设计 (16)3.3.5 电机驱动电路设计 (18)3.4 PCB设计 (21)3.4.1 PCB设计技巧规则 (21)3.4.2 PCB设计步骤 (22)3.5 实物介绍 (25)第4章系统软件设计 (27)4.1 Keil MDK5.12简介 (27)4.1.1 Keil MDK概述 (27)4.1.1 Keil MDK功能特点 (27)4.2 软件设计框图 (28)4.3 软件调试仿真 (29)4.4 飞控软件设计 (30)4.4.1 MPU6050数据读取 (30)4.4.2 姿态计算IMU (32)4.4.3 PID电机控制 (32)结论 (36)致谢 (38)参考文献 (39)附录1 遥控器主程序源代码 (40)附录2 飞行器主程序源代码 (45)附录3 遥控器原理图 (50)附录4 飞行器原理图 (51)第1章绪论1.1 论文研究背景及意义图1-1 典型四轴飞行器四轴飞行器是一种具有4个对称旋翼的直升机(如图1-1),具有垂直起降、结构简单、操纵方便及机动灵活等优点,在飞行器上挂载摄像头等模块能够实现许多实用功能。
摘要四旋翼飞行器是一种四螺旋桨驱动的、可垂直起降的飞行器,这种结构被广泛用于微小型无人飞行器的设计,可以应用到航拍、考古、边境巡逻、反恐侦查等多个领域,具有重要的军用和民用价值。
四旋翼飞行器同时也具有欠驱动、多变量、强耦合、非线性和不确定等复杂特性,对其建模和控制是当今控制领域的难点和热点话题。
本次设计对小型四旋翼无人直升机的研究现状进行了细致、广泛的调研,综述了其主要分类、研究领域、关键技术和应用前景,然后针对圆点博士的四旋翼飞行器实际对象,对其建模方法和控制方案进行了初步的研究。
首先,针对四旋翼飞行器的动力学特性,根据欧拉定理以及牛顿定律建立四旋翼无人直升机的动力学模型,并且考虑了空气阻力、转动力矩对于桨叶的影响,建立了四旋翼飞行器的物理模型;根据实验数据和反复推算,建立系统的仿真状态方程;在Matlab环境下搭建了四旋翼飞行器的非线性模型。
选取四旋翼飞行器的姿态角作为控制对象,借助Matlab模糊工具箱设计了模糊PID控制器并依据专家经验编辑了相应的模糊规则;通过仿真和实时控制验证了控制方案的有效性,并在此控制方案下采集到了输入输出数据;利用单片机编写模糊PID算法控制程序,实现对圆点博士四旋翼飞行器实物的姿态控制。
本设计同时进行了Matlab仿真和实物控制设计,利用模糊PID算法,稳定有效的对四旋翼飞行器的姿态进行了控制。
关键词:四旋翼飞行器;模糊PID;姿态控制ⅠAbstractQuadrotor UA V is a four propeller driven, vertical take-off and landing aircraft, this structure is widely used in micro mini unmanned aerial vehicle design and can be applied to multiple areas of aerial, archaeology, border patrol, anti-terrorism investigation, has important military and civil value.Quadrotor UA V is a complicated characteristic of the complicated characteristics such as the less drive, the multi variable, the strong coupling, the nonlinear and the uncertainty, and the difficulty and the hot topic in the control field.Research status of the design of small quadrotor UA V were detailed and extensive research, summarized the main classification, research areas, key technology and application prospect of and according to Dr. dot quadrotor actual object, the modeling method and control scheme were preliminary study.First, for the dynamic characteristics of quadrotor UA V, dynamic model of quadrotor UA V is established according to the theorem of Euler and Newton's laws, and consider the air resistance and rotation torque for the effects of blade, the establishment of the physical model of the quadrotor UA V; root according to experimental data and repeated calculation, the establishment of system simulation equation of state; under the MATLAB environment built the nonlinear model of the quadrotor UA V Select the attitude of the quadrotor angle as the control object, with the help of matlab fuzzy toolbox to design the fuzzy PID controller and according to experience of experts to edit the corresponding fuzzy rules; through the simulation and real-time control verify the effectiveness of the control scheme, and this control scheme under the collection to the data input and output; written by SCM fuzzy PID control algorithm, dots, Quad rotor UA V real attitude control. The design of the Matlab simulation and the physical control design, the use of fuzzy PID algorithm, the stability of the four rotor aircraft attitude control.Keywords:Quadrotor UA V;F uzzy PID;Attitude controlⅡ目录摘要(中文) (Ⅰ)摘要(英文) (Ⅱ)第一章概述 (1)1.1 课题背景及意义 (1)1.2 四旋翼飞行器的研究现状 (2)1.3 四旋翼飞行器的关键技术 (5)1.3.1 数学模型 (6)1.3.2 控制算法 (6)1.3.3 电子技术 (6)1.3.4 动力与能源问题 (6)1.4 本文主要内容 (6)1.5本章小结 (7)第二章四旋翼飞行器的运动原理及数学模型 (7)2.1四旋翼飞行器简介 (7)2.2 四旋翼飞行器的运动原理 (8)2.2.1 四旋翼飞行器高度控制 (8)2.2.2 四旋翼飞行器俯仰角控制 (9)2.2.3 四旋翼飞行器横滚角控制 (9)2.2.4 四旋翼飞行器偏航角控制 (10)2.3四旋翼飞行器的数学模型 (11)2.3.1坐标系建立 (11)2.3.2基于牛顿-欧拉公式的四旋翼飞行器动力学模型 (12)2.4 本章小结 (15)第三章四旋翼飞行器姿态控制算法研究 (15)3.1模糊PID控制原理 (15)3.2 姿态稳定回路的模糊PID控制器设计 (16)3.2.1 构建模糊PID控制器步骤 (17)3.2.2 基于Matlab的姿态角控制算法的仿真 (22)3.3 本章小结 (25)第四章四旋翼飞行器飞行控制系统软件设计 (25)4.1 模糊PID控制算法流程图 (25)4.2 系统实验及结果分析 (26)4.3 本章小结 (27)第五章总结与展望 (28)5.1 总结 (28)5.2 展望 (28)参考文献 (28)第一章概述有史以来,人类一直有一个梦想,那就是可以像蓝天上自由翱翔的鸟儿一样。
2014-2015年大学生创业新基金项目结题论文作品名称:用于作物生长监测的飞行机器人学院:工学院指导老师:孙磊申报者姓名(团队名称):李家强、梁闪闪、谈姚勇二〇一五年五月目录摘要 (3)关键词 (3)引言 (3)多旋翼农用无人机的发展简史 (4)作品设计方案1.1 飞行器的结构框架和工作原理 (5)1.2 硬件选择 (6)1.3硬件电路设计1.3.1:主控模块 (7)1.3.2:姿态传感器模块 (8)1.3.3:电源模块 (9)1.4 软件系统设计1.4.1:总体设计 (9)1.4.2:姿态解算实现 (10)参考文献 (11)附件1:作品实物图 (12)附件2:原件清单 (13)附件3 电路原理图 (14)附件4 部分程序(遥控器) (15)关于作物成产检测的飞行机器人的研究报告作者:李家强、梁闪闪、谈姚勇指导老师:孙磊(安徽农业大学工学院合肥市长江西路130号 230036)摘要:四旋翼飞行器通过排布在十字形支架四个顶端的旋翼,产生气动力,控制飞行器的升降、倾斜、旋转等。
本文主要讨论四旋翼飞行器所选用的单片机类型,以及选用此款单片机的原因。
通过PWM技术来调节飞行器的飞行状态,以MPU-6050为惯性测量器件。
所形成的飞行控制系统使得飞行器能达到较平稳的飞行姿态。
整体采用无线遥控控制,无线频波为2.51GHZ。
关键词:四旋翼飞行器、作物检测、飞行时间、飞行距离Abstract:through four rotor aircraft configuration at the top of the cross-shaped bracket four rotor, aerodynamic force, control aircraft movements, tilt, rotation, etc. This article focuses on four rotor aircraft chooses the types of single chip microcomputer and choose this single chip microcomputer. Through the PWM technology to adjust the aircraft's flight status, inertial measurement device for MPU - 6050. Formed by makes the aircraft flight control system can achieve a smooth flight. Overall the wireless remote control, wireless 2.51 GHZ frequency wave. Keywords: four rotor aircraft, crop detection, time of flight, flight distance引言:随着我国的经济迅速发展,农业种植的规模化、机械化、信息化。
四旋翼设计与实现毕业设计论文摘要四轴无人机是一种结构新颖的多旋翼飞行器,其通过调节四个电机的转速来实现飞行控制。
与常规旋翼式飞行器相比,对称分布的四个桨叶可使旋翼的反扭矩相互抵消,不需要额外的反扭矩尾桨。
在民用和工业应用领域,无人机因其因其独特的结构和优秀的性有着广泛的应用前景,如灾情救援、交通检测、货物运输等领域都有实际应用的意义。
本文根据无人机的特性,采用了基于ARM CortexM4 架构的STM32F3微处理器作为飞控平台。
利用板载的陀螺仪和加速度计MPU-6050内部的DMP功能进行姿态解算,通过PID姿态控制器来实现无人机准确的姿态控制。
同时,在无人机上加装了超声波传感器和GPS模块,可通过2.4G频段的遥控器进行无线控制,以定点定高的悬停功能来实现精准的货物投放。
四轴无人机上又可加装OSD等模块进行数据的实时传输和数据采集,以在实际中有更多应用。
关键词:四轴飞行器;STM32F3;MPU6050;PID控制;超声波传感器ABSTRACTFour-axis unmanned aerial vehicle is a novel multi-rotor aircraft, which adjusts the speed of four motors to achieve flight control. Compared with the conventional rotorcraft, the symmetrical distribution of the four blades of the rotor torque can cancel each other, without additional anti-torque tail rotor. In civil and industrial applications, unmanned aerial vehicles because of its unique structure and excellent sex has a wide range of applications, such as disaster relief, traffic detection, cargo transportation and other fields have practical significance. According to the characteristics of unmanned aerial vehicles, the STM32F3 microprocessor based on ARM CortexM4 is adopted as the flight control platform. The posture of the unmanned aerial vehicle (UA V) can be controlled by the PID attitude controller based on the onboard gyro and the DMP function of the accelerometer MPU-6050. At the same time, in the unmanned aerial vehicles to install the ultrasonic sensor and GPS module, through the 2.4G band remote control for wireless control to fixed-point high hover function to achieve accurate delivery of goods. 4-axis unmanned aerial vehicles can be installed on the OSD and other modules for real-time data transmission and data acquisition, in practice there are more applications.Key words: four-axis vehicle; STM32F3; MPU6050; PID control; ultrasonic sensor目录1 概论 (1)1.1 选题背景 (1)1.2 国内外现状研究 (1)1.2.1 四旋翼飞行器的国内发展现状 (1)1.2.2 四旋翼飞行器的国外发展现状 (1)2 四旋翼飞行模型结构与硬件电路设计 (3)2.1 四旋翼飞行器的结构与原理 (3)2.2飞行器控制硬件电路设计需求分析 (4)2.3元器件的选型 (5)2.3.1微控制器的选型 (5)2.3.2传感器的选型 (6)2.3.3电机、桨叶及机臂的选型 (8)2.4硬件电路的设计 (9)2.4.1电源部分 (9)2.4.2 MCU选型 (10)2.4.3 传感器部分 (12)2.4.4 动力部分 (12)3控制器软件设计 (13)3.1 控制算法选择 (13)3.2 基于MPU6050传感器的姿态角求解 (14)3.2.1 欧拉角与四元数 (14)3.2.3 获取四旋翼飞行器姿态 (18)3.3 飞行器控制算法设计 (19)4测试与分析 (21)4.1 姿态解析测试 (21)4.2 飞行控制测试 (21)5 总结与展望 (23)致谢 (25)附录 (27)1 概论1.1 选题背景四轴无人机是一种垂直起降的无人机,有着广阔的应用前景。
冯如杯论文《四旋翼飞行器的设计与控制》院(系)名称机械工程及自动化学院作者姓名薛骋豪学号35071422指导教师梁建宏2008年3月22日四旋翼飞行器的设计与控制薛骋豪摘要四旋翼直升机,其主旋翼分成前后与左右两组,旋转时方向相反,因此与一般直升机最主要的不同点为四旋翼直升机不需要用尾旋翼来平衡机体。
因为四旋翼直升机为不稳定系统,因此需利用旋转专用的感测器:陀螺仪来感知机身的平衡程度并将讯号传送至微控制器,再通过微控制器内部程序的运算产生控制信号来控制机体上四个旋翼的转速,以维持整个机身的平衡促使四旋翼直升机能顺利飞行。
关键词:四旋翼、VTOL(垂直起降)、矩阵控制、AbstractQuadrotor, its main rotor divides into with two about groups from beginning to end, in opposite direction while rotating, so Quadrotor and does not need to fasten the wing and having the balance organism for four with the end with the main difference of general helicopter. Whether four fasten wing helicopter stable system, need to utilize and rotate the special-purpose detecting device. The gyroscope comes to perceive balancing the degree and conveying the signal to the little controller of the fuselage, and then produce the control signal to control four rotational speed of fastenning the wings on the organism through the operation of the procedure within the little controller, impel four to fly smoothly while Quadrotor for the balance of maintaining the whole fuselage.Key words: Quadrotor、VTOL(Vertical Take-Off and Landing)、matrix control目录1、绪论 (3)2、正文 (4)2.1、四旋翼直升机的动力学原理 (4)2.2、四旋翼直升机的控制系统 (6)3、结论 (9)4、致谢 (10)5、参考文献 (10)1、绪论关于四旋翼直升机系统的研究动机与其它飞行原理相比较,VTOL(垂直起降)系统有特性能够完成对其他飞行器来说非常困难的或者不可能执行的任务。
目录第二章总体方案设计 (1)2.1 四轴飞行器运动控制系统的基本工作原理 (1)2.2 四轴飞行器控制系统结构 (2)2.3 本章小结 (4)第三章硬件设计 (5)3.1 概述 (5)3.2 主控制器的选择 (5)3.3 信息采集 (11)3.3.1 加速度传感器与陀螺仪 (11)3.3.2 数字罗盘 (14)3.4 无线通讯 (17)3.5 电机驱动 (22)3.5.1 无刷电机 (22)3.5.2 PWM调速 (23)3.5.3 可控开关的选择 (23)3.6 供电电路 (26)3.6.1 电池选择 (26)3.6.2 电压变换器的选择 (26)3.7 本章小结 (28)第四章控制算法 (29)4.1 标定加速度 (29)4.2 姿态结算 (31)4.3 融合算法 (32)4.4 控制算法 (35)4.5 本章小结 (37)5.1 STM32F103T8U6的端口分配 (38)5.2 流程设计 (40)5.3 无线通讯 (42)5.4 控制计算 (45)5.5 本章小结 (47)第六章设计总结 (48)第二章总体方案设计四旋翼飞行器是一种布局形式比较新颖的飞行器,其结构较为紧凑。
四旋翼飞行器主要是通过改变4个电机的转速来调节螺旋桨转速,由旋翼升力的变化实现对飞行器的控制。
四旋翼飞行器由于能够垂直起降,自由悬停,可适应于各种速度及各种飞行剖面航路的飞行状况。
2.1 四轴飞行器运动控制系统的基本工作原理电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
各个旋翼对机身所施加的反扭矩与旋翼的旋转方向相反,因此当电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,可以平衡旋翼对机身的反扭矩。
四旋翼飞行器在空间共有6个自由度(分别沿3个坐标轴作平移和旋转动作),这6个自由度的控制都可以通过调节不同电机的转速来实现。
图2-1 运动控制原理图飞行器在三维空间中具有6个运动自由度.包括3个坐标轴方向的线运动和3个坐标轴方向的角运动。
摘要四轴飞行器具备飞行器的所有优点,又具备无人机的造价低、可重复性强以及事故代价低等特点,具有广阔的应用前景。
可应用于军事上的地面战场侦查和监视,获取不易获取的情报。
能执行禁飞区巡逻和近距离空中支持等特殊任务,可应对现代电子战、实现通信中继等现代战争模式。
在民用方面可用于灾后搜救、城市交通巡逻与目标跟踪等诸多方面。
工业上可以用在安全巡捡,大型化工现场等人工不容易达到的空间作业。
因此,四轴飞行器的研究意义重大。
本文主要讨论四轴飞行器的设计实现、建模分析与控制器设计。
首先从历史的角度介绍小型四轴飞行器的发展现状,引入现代四轴飞行器的研究,以及运用现代控制理论进行的研究方法和取得的结果。
其次是给出本次毕业设计的四轴飞行器样机模型与飞行控制器电路设计。
文中着重从机械结构与飞行控制器硬件电路设计方面论述四轴飞行器的设计。
文中详细分析了机械结构设计中的元器件选型,实现了一个切实可用,能满足应用研究的四轴飞行器模型。
之后分析四轴飞行器的飞行控制原理,在此基础上进行动力学分析,建立四轴飞行器的动力学模型。
通过软件设计实现飞行控制器方案,并通过protues软件践行模拟仿真以讨论其可行性。
关键词:四轴飞行器;单片机;飞行控制器;无人机ABSTRACT TheKeywords: Four aircraft; SCM; Flight controller; UA V目录1.绪论 (1)1.1国内外研究现状 (1)1.2本文研究目的及意义 (2)1.3本文的主要内容 (3)2.机械结构设计 (4)2.1元器件的选择 (4)2.1.1四轴飞行器基本工作原理 (4)2.1.2旋翼和机架的确定 (5)2.1.3其他小部件的选择 (5)2.2电机 (6)2.3总体结构 (7)3.硬件设计 (10)3.1概述 (11)3.2硬件电路的设计与选型 (11)3.2.1飞行控制系统结构 (11)3.2.2单片机选型及介绍 (12)3.2.3电机驱动电路 (14)3.2.4无线通讯与遥控 (17)3.2.5电源电路设计 (18)3.3 硬件部分整体电路图 (19)4.软件设计及调试分析 (20)4.1PWM调速原理分析 (20)4.2调速部分设计及分析 (22)4.3红外遥控系统的程序设计 (26)4.3.1红外发射部分 (26)4.3.2红外接收部分 (28)4.3.3键盘设计 (31)5. 调试分析 (33)5.1 Protues简介 (33)5.2调试结果分析 (37)结束语 (38)致谢 (39)参考文献 (40)附录A:外文原文 (41)附录B:中文翻译 (51)附录C:程序源代码 (55)1 绪论1.1国内外研究现状四轴飞行器是无人飞行器的一种,也就是智能机器人,四轴指飞行器的动力是由四个旋翼式的飞行引擎提供。
毕业论文基于单片机的四轴飞行器夏纯吉林建筑大学2015年6月毕业论文基于单片机的四轴飞行器学生:夏纯***师:**专业:电子信息工程所在单位:电气与电子信息工程学院答辩日期:2015 年6月目录摘要 ...................................................................................................................................... ABSTRACT ........................................................................................................................... 第1章绪论.........................................................................................................................1.1 论文研究背景及意义...........................................................................................1.2 国内外的发展情况 ...............................................................................................1.3 本文主要研究内容 ............................................................................................... 第2章总体方案设计.......................................................................................................2.1 总体设计原理 ........................................................................................................2.2 总体设计方案 ........................................................................................................2.2.1 系统硬件电路设计方案............................................................................2.2.2 各部分功能作用..........................................................................................2.2.3 系统软件设计方案 ..................................................................................... 第3章系统硬件电路设计..............................................................................................3.1 Altium Designer Summer 09简介........................................................................3.2 总体电路设计 ........................................................................................................3.2.1 遥控器总体电路设计.................................................................................3.2.2 飞行器总体电路设计.................................................................................3.3 各部分电路设计....................................................................................................3.3.1 电源电路设计 ..............................................................................................3.3.2 主控单元电路设计 .....................................................................................3.3.3 无线通信模块电路设计............................................................................3.3.4 惯性测量单元电路设计............................................................................3.3.5 电机驱动电路设计 .....................................................................................3.3.6 串口调试电路设计 .....................................................................................3.4 PCB设计..................................................................................................................3.4.1 PCB设计技巧规则......................................................................................3.4.2 PCB设计步骤...............................................................................................3.4.3 PCB外形设计...............................................................................................3.5 实物介绍 ................................................................................................................. 第4章系统软件设计.......................................................................................................4.1 Keil MDK5.12简介................................................................................................4.1.1 Keil MDK概述 .............................................................................................4.1.1 Keil MDK功能特点 ....................................................................................4.2 软件设计框图 ........................................................................................................4.3 软件调试仿真 ........................................................................................................4.4 飞控软件设计 ........................................................................................................4.4.1 MPU6050数据读取 .....................................................................................4.4.2 姿态计算IMU .............................................................................................4.4.3 PID电机控制................................................................................................ 结论 . (36)致谢 ...................................................................................................................................... 参考文献................................................................................................................................ 附录1 遥控器主程序源代码........................................................................................... 附录2 飞行器主程序源代码........................................................................................... 附录3 遥控器原理图. (50)附录4 飞行器原理图 (51)摘要四轴飞行器具备VTOL(Vertical Take-Off and Landing,垂直起降)飞行器的所有优点,又具备无人机的造价低、可重复性强以及事故代价低等特点,具有广阔的应用前景。