一种模糊PIDSmith污水处理的控制方法
- 格式:pdf
- 大小:321.40 KB
- 文档页数:3
基于模糊PID的Smith预估碱液温控系统邢健峰;纪志成【摘要】针对脱盐水系统中碱液温度换热系统的大时滞、时变性、工况复杂等特点,提出一种基于模糊自整定PID的Smith预估控制系统,利用对系统偏差量与偏差变化率的采集,建立模糊控制表对PID控制器的3个参数进行在线自整定,通过Smith预估器对系统中的时间滞后进行补偿.文中详细阐述了模糊控制器的设计与Smith预估器的PLC实现方法,并对系统进行了仿真分析.实际运行结果表明,该控制系统有效地提升了系统的动态与稳态特性,克服了大延迟对系统造成的影响.该系统在重庆某轮胎公司脱盐水站中运行效果良好.【期刊名称】《自动化与仪表》【年(卷),期】2014(029)007【总页数】5页(P43-47)【关键词】模糊控制;自整定;Smith预测;换热器【作者】邢健峰;纪志成【作者单位】江南大学电气自动化研究所,无锡214122;江南大学电气自动化研究所,无锡214122【正文语种】中文【中图分类】TP273工业控制过程中时间滞后是一个普遍存在的现象,对于时滞时间较小的控制系统,可以通过常规的PID控制器进行控制,但对于时间滞后较大的控制系统,常规的控制方法常无法满足工业上的控制要求。
对于一些大时滞的系统来说,现阶段存在多种解决办法,如预测时滞PI控制网络[1],基于Smith预估器的PID控制系统[2],具有内膜结构的PI/PID控制系统[3],这些控制系统都取得较好的控制效果,但是,它们都缺乏一定的自适应机制。
在工业控制系统中,工况的不同会伴随着多种过程量的变化,需要控制系统根据不同工况进行自适应的变化。
温度控制具有滞后性,使得被控量不能及时反映控制器的动作,控制信号要延迟一段时间才能反映到被控量上,同时当系统中存在扰动时,控制器无法及时对干扰信号产生抑制作用[4-6],若采用传统的PID控制器对被控量进行控制,在滞后时间较长的情况下,控制系统无法达到控制要求。
PID控制在污水处理中的应用研究摘要:系统地研究了PID在污水处理中的应用。
该PID选择S7-300系列PLC,使用WinCC软件对上位机进行系统组态,运用STEP7软件对下位机进行编程,采用先进的自适应模糊PID控制方案对污水处理进行控制。
在某污水处理厂的实施结果表明:其结构合理,安全可靠,技术性能均满足实际需要。
关键词:污水处理;PID;PLC;模糊自适应PIDAbstract: This paper study the application of PID in the sewage treatment system. The PID select the S7-300 series PLC, use WinCC software on the host computer system configuration, use the STEP7 software programming to the next bit machine, the use of advanced adaptive fuzzy PID control scheme to control the sewage treatment. The results of the implementation in a sewage treatment plant: its structure is reasonable, safe, reliable, and technical performance to meet actual needs.Key words: wastewater treatment; the PID; the PLC; fuzzy adaptive PID 中图分类号:U664.9+2文献标识码: A 文章编号:2095-2104(2012)06-0020-02 引言随着人口的增加、经济的发展以及工业步伐的加快,我国城市污水的排放量也同趋增长,现代污水处理厂采用计算机控制日益普通。
一类时滞系统的fuzzy-pi-smith控制方法
Fuzzy-PI-Smith控制方法是一种应用于时滞系统的控制器设计方法。
它通过基于聚类原理的模糊控制理论,将模糊系统控制与PID传
统控制进行整合。
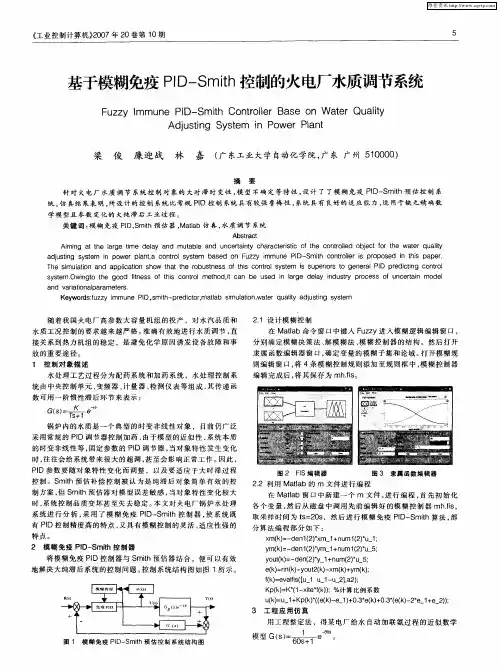
它由三个部分组成:fuzzy模块、PI模块和变频器
模块。
fuzzy模块使用聚类函数法,将模糊规则转换为当前数学模型;
PI模块能够控制系统的输入和输出;变频器模块可以改变控制器的参数。
Fuzzy-PI-Smith控制方法的优点在于它的模糊系统有效地处理了
时滞系统中的非线性,减少了控制器的调节精度,提高了系统的可靠
性和稳定性;PI模块能够控制系统的输入和输出,调节系统的输入量
以实现动态精度;变频器模块可以改变控制器参数来控制系统收敛性、稳定性和鲁棒性。
Fuzzy-PI-Smith控制方法也有一些缺点,尤其是其调参复杂性问题。
此外,fuzzy模块也有许多参数,这些参数是需要经过大量试验才
能获得的,而且很难获取合理的参数。
因此,一旦变量参数发生变化,fuzzy-pi-smith控制器的性能也会受到影响。
总而言之,Fuzzy-PI-Smith控制算法在控制时滞系统的方面具有
优秀的表现,但是在某些情况下它也有一些缺点。
作者简介:赵金宪(1970—),男,吉林舒兰人,教授,黑龙江科技学院电子信息工程学科带头人,硕士研究生导师,主要从事信号与信息处理、计算机控制技术等方面的研究。
模糊自适应PID 控制在污水处理溶解氧控制中的应用赵金宪,张志强(黑龙江科技学院电气与信息工程学院,黑龙江哈尔滨150027)摘要:为了解决模糊控制中的强化调节作用与静态稳定性之间的矛盾,针对污水处理的控制系统的非线性、大惯性、时变和难以建立精确模型等难点,提出将模糊控制的强鲁棒性和传统PID 控制的优稳态特性相结合的思路,设计了模糊自适应PID 控制模型。
通过MATLAB 仿真和实际应用表明,与常规的PID 控制相比,采用自适应模糊PID 控制后,溶解氧控制系统的响应速度加快,超调量减小,具有更好的控制效果,更强的鲁棒性和抗干扰性。
该控制方法在黑龙江科技学院污水处理控制系统中得到了应用并得到了预期效果。
关键词:污水处理;溶解氧;PID 控制器;模糊控制器;MATLAB 仿真中图分类号:TP273+.2文献标志码:B 文章编号:1671-5276(2011)04-0161-04Application of Fuzzy Adaptive PID Control in Sewage Treatment Dissolved Oxygen ControlZHAO Jin-xian ,ZHANG Zhi-qiang(College of Electrical and Information Engineering Heilongjiang Institute of Science and Technology ,Harbin 150027,China )Abstract :To solve the conflict of between static stability and strengthen regulation in the fuzzy control and aiming at the difficulties inthe process of sewage treatment ,such as non-linearity ,large inertia ,time-varying that it is difficult to establish an accurate model ,this paper proposes the idea that the robustness of fuzzy control is combined with steady state performance of conventional PID control to design of adaptive fuzzy PID control model.Compared with the commonly used PID control ,Matlab simulation and practical applica-tion show that the dissolved oxygen control system has the advantages of fast response ,overshoot decreasing ,better control per-formance ,more powerful robustness and anti-interference after utilizing adaptive fuzzy PID control.The control method is applied to Sewage treatment system in the Heilongjiang Institute of Science and Technology and the desired effect is got.Key words :sewage treatment ;dissolved oxygen ;PID controller ;fuzzy controller ;Matlab simulation0引言[1]在水资源日益紧缺的今天,做好城市污水和工业废水的处理和再生利用,有利于保护水环境、保护水源,促进有限的水资源能够可持续开发利用。
模糊PDI控制算法学院:班级:学号:姓名:完成日期:一、模糊PID控制算法综述模糊控制器是一种近年来发展起来的新型控制器,其优点是不要求掌握受控对象的精确数学模型,而根据人工控制规则组织控制决策表,然后由该表决定控制量的大小。
二、模糊PID 控制的原理CPU 根据系统偏差(偏差=给定-反馈),和偏差变化率(偏差变化率=当前周期偏差-上周期偏差)查询相应的模糊控制表,得到Kp ,Ki ,Kd 三个参数的整定值,然后进行PID 运算,真正的运用到实际中也就是一张模糊控制查询表,然后就是查表了,也很简单,关键是表的建立还有专家经验的问题等。
三、模糊控制规则模糊控制规则的形成是把有经验的操作者或专家的控制知识和经验制定成若干控制决策表,这些规则可以用自然语言来表达,但一般要进行形式化处理。
例如:①“If A n Then B n”;②“If A n Then B n Else C n”;③“If A n And B n Then C n”;其中A n是论域U 上的一个模糊子集,B n是论域V 上的一个模糊子集。
根据人工试验,可离线组织其控制决策表R ,R 是笛卡尔乘积U×V 上的一个模糊子集。
则某一时刻,以上控制规则的控制量分别为:①B n=A n.R②B n=A n.RC n=A n.R③C n=(A n×B n).R式中 ×——模糊直积运算.——模糊合成运算控制规则③是实际模糊控制器最常用的规则形式。
在这类规则中,A一般用来表示被控制量的测量值与期望值的偏差E=x-x的隶属函数。
B一般表示0偏差变化率C=d E/dt的隶属函数。
目前设计的模糊控制器基本上都是采用这种方式。
即在模糊控制过程中,同时要把系统与设定值的偏差和偏差的变化率作为模糊输入量。
这种方法不仅能保证系统的稳定性,而且还可减少超调量和振荡现象。
四、模糊PID控制算法PID调节对于线性定常系统的控制是非常有效的,但对于非线性、时变的复杂系统和模型不清楚的系统就不能很好地控制。
模糊pid控制 python实现模糊PID控制(Fuzzy PID control)是一种基于模糊逻辑的控制方法,它结合了模糊控制和经典PID控制的优点,可以在复杂和不确定的环境中实现精确的控制。
本文将介绍模糊PID控制的原理、实现方法以及在Python中的应用。
一、模糊PID控制的原理PID控制是一种经典的控制方法,它通过比较实际输出与期望输出之间的误差,根据比例、积分和微分三个参数进行调节,使系统输出逐渐趋近于期望值。
然而,传统的PID控制方法在面对非线性、时变和不确定性系统时表现不佳。
模糊PID控制通过引入模糊逻辑来解决传统PID控制的问题。
模糊逻辑是一种能够处理模糊信息的数学方法,它可以将模糊的输入映射到模糊的输出。
模糊PID控制器通过将误差、误差变化率和误差积分三个输入量模糊化,然后根据一组模糊规则进行推理,得到模糊输出。
最后,通过解模糊化的方法将模糊输出转化为具体的控制量。
二、模糊PID控制的实现方法1. 模糊化模糊化是将具体的输入量映射到模糊集合上的过程。
常用的模糊化方法有三角隶属函数、梯形隶属函数和高斯隶属函数等。
根据具体的问题和经验,选择合适的隶属函数进行模糊化。
2. 规则库规则库是模糊PID控制的核心。
它包含了一组模糊规则,用于根据输入量的模糊值推理出输出量的模糊值。
模糊规则一般采用IF-THEN的形式,例如“IF 误差是A1 AND 误差变化率是B2 THEN 输出是C3”。
规则库的设计需要根据具体问题进行,可以基于经验或者专家知识。
3. 推理机制推理机制是根据模糊规则进行推理的过程。
常用的推理方法有最大最小合成、模糊推理和模糊推理和等。
推理机制将模糊输入与规则库进行匹配,然后根据匹配的程度计算出模糊输出的隶属度。
4. 解模糊化解模糊化是将模糊输出转化为具体的控制量的过程。
常用的解模糊化方法有最大隶属度法、面积法和重心法等。
解模糊化方法根据模糊输出的隶属度分布,计算出具体的控制量。
第29卷第4期江苏理工学院学报JOURNAL OF JIANGSU UNIVERSITY OF TECHNOLOGY Vo l.29,No.4 Aug.,20232023年8月随着大数据与物联网技术的快速发展以及节能环保理念的深入人心,城市建设也开始向智能化、绿色化方向发展[1-2]。
城市供水系统管网铺设复杂,分布范围广,具有非线性、时滞性和用电量大等特点[3]。
在节能方面,采用PLC控制变频器调速的供水方式,具有节能、控制方便等优点[4],可以有效降低城市供水系统的用电量。
在水压控制技术方面,由传统PID控制的恒压供水变频调速系统,尽管控制精度较高[5],但是,存在参数整定复杂、调节时间长、抗干扰性差等问题[6]。
模糊控制可以防止传统PID控制器适应能力差等弊端,但是,往往在系统稳定运行期会出现供水压力偏差[7-8]。
模糊免疫PID控制结合了免疫控制的自适应性和传统PID控制的优点,在系统稳定运行时产生的偏差较小[9];然而,上述控制技术主要是在常规PID控制规则中采用模糊控制或其他方法整定控制参数,更侧重于对常规PID技术的改进,而未充分考虑恒压供水系统中存在的时滞问题。
利用Smith预估器可以减弱系统中时滞环节引起的超调或者振荡[10]。
因此,针对城市供水系统的时滞和抗干扰问题,可以把改进的PID控制算法与Smith预估有机地结合起来。
本文针对恒压供水系统,提出了一种基于Smith预估器的模糊免疫PID控制策略,该方法综合了Smith预估、模糊免疫控制以及PID控制三者的优点。
1变频恒压供水系统如图1所示,城市变频供水系统由压力传感器、PLC控制器、变频器、交流电机、蓄水池、供水管网和水泵组成[11]。
其中:压力传感器为反馈检测机构;变频器为驱动机构;交流电机为执行机构;水泵为控制对象;PLC控制器为控制机构。
压力基于Smith预估的恒压供水系统模糊免疫PID控制研究李广军,武瑞杰,李文强(江苏理工学院汽车与交通工程学院,江苏常州213001)摘要:针对供水系统水压控制存在的时滞、干扰多等特性,设计了一种基于Smith预估的模糊免疫PID控制系统。
smith控制原理
Smith控制原理,又称为比例-积分-微分(PID)控制器,是一种广泛应用于自动控制系统的控制算法。
它基于反馈控制的概念,通过连续监测系统的输出并与目标值进行比较,计算出一个控制量来调整系统的操作,使其尽可能接近目标值。
Smith控制原理的核心是PID控制器,其中包含了三个主要的控制参数:比例、积分和微分。
比例控制参数用于调整控制器输出与目标值之间的差异,积分控制参数用于校正系统的累积误差,而微分控制参数则用于修正系统的动态响应。
在Smith控制原理中,比例控制参数根据当前误差的大小和方向来调整控制器的输出。
具体来说,如果系统的输出比目标值偏低,那么比例控制参数将增加控制器输出,以使系统趋向于目标值。
相反,如果系统的输出比目标值偏高,比例控制参数将减小控制器输出,以使系统逼近目标值。
积分控制参数用于处理系统的累积误差,并在一段时间内进行补偿。
如果系统存在较大的累积误差,积分控制参数将逐渐增加控制器的输出。
这使得系统可以更快地达到目标值,并且在达到目标值后保持最小的稳态误差。
微分控制参数用于校正系统的动态响应。
它通过监测误差的变化率来预测系统的趋势,并相应地调整控制器的输出。
通过引入微分控制参数,可以减小系统的超调量和快速响应的振荡,提高系统的稳定性和控制精度。
综上所述,Smith控制原理通过比例、积分和微分三个控制参数,以及反馈控制的概念,实现了对系统的精确控制。
它广泛应用于工业自动化、机械控制、飞行器导航等领域,在提高系统的性能和稳定性方面发挥了重要作用。
在控制工程中,PID控制和模糊控制都是常见的控制方法。
每种方法都有其优点和局限性。
在一些特定的应用中,我们可能需要结合多种控制方法来实现更好的控制效果。
基于模糊PID和滑膜控制的复合控制方法就是其中一种。
1. 概述模糊PID和滑膜控制模糊PID控制是PID控制和模糊控制相结合的一种控制方法。
它在传统的PID控制基础上,增加了模糊控制的思想,使控制系统更具智能化和鲁棒性。
而滑膜控制是一种基于理想转移函数的控制方法,通过引入滑膜面的概念,能够有效地克服系统参数变化和外部扰动的影响。
2. 模糊PID和滑膜控制的优势通过将模糊控制和滑膜控制相结合,可以充分发挥两种控制方法的优势。
模糊控制能够处理系统非线性和不确定性问题,而滑膜控制能够应对系统的参数变化和外部扰动。
基于模糊PID和滑膜控制的复合控制方法能够在复杂的控制环境中取得良好的控制效果。
3. 深入探讨基于模糊PID和滑膜控制的复合控制方法在实际应用中,基于模糊PID和滑膜控制的复合控制方法可以通过以下步骤来实现:3.1 模糊PID控制器设计需要设计模糊PID控制器,通过模糊化和解模糊化的过程,将模糊控制引入到传统的PID控制中。
这样可以使控制系统具有更好的适应性和鲁棒性。
3.2 滑膜面设计接下来,设计滑膜面,通过引入滑膜面的概念,可以将系统的动态响应特性进行调整,以应对系统的参数变化和外部扰动。
3.3 复合控制器设计将模糊PID控制器和滑膜面结合起来,形成基于模糊PID和滑膜控制的复合控制器。
这样的控制器能够充分发挥模糊控制和滑膜控制的优势,实现更好的控制效果。
4. 个人观点和理解在我看来,基于模糊PID和滑膜控制的复合控制方法是一种在特定应用中非常实用的控制方式。
它能够充分发挥模糊控制和滑膜控制的优势,解决传统PID控制难以处理的复杂问题。
通过合理的设计和参数调节,可以使复合控制器在实际控制系统中取得良好的效果。
总结:基于模糊PID和滑膜控制的复合控制方法能够充分发挥模糊控制和滑膜控制的优势,解决传统PID控制难以处理的复杂问题。
西北民族大学2011级毕业论文基于模糊PID的污水PH值控制系统年级:学号:姓名:专业:指导老师:二〇一五年五月摘要现代城市生产生活过程中排放的污水其PH值都会偏高或者偏低,这些污水如果进行直接排放的话会对人类的生存环境以及自然生态造成巨大的破坏,因此对于此类污水要进行处理才能够进行排放,本文主要研究污水的PH中和过程,PH中和能够大大降低污水对于自然环境的危害,对于环境保护具有重大的研究意义。
对于污水的PH中和过程是一个非常复杂的非线性过程,这给污水PH中和工作造成了巨大的阻碍,因此本课题将研究基于模糊PID控制的污水PH中和过程。
希望能得到令人满意的效果。
关键词:PH值;非线性;模糊PID;控制系统AbstractProduction process of discharge of life in the modern city sewage will be higher or lower the PH.If these wastewater direct emissions would be the survival of the human environment and the natural environment caused great damage.So for this kind of wastewater to be processed can be discharged.This paper mainly studies the sewage PH neutralization process,it can greatly reduce the dangers for natural environment. Research on environmental protection is of great significance.But by related literature shows that, for wastewater PH neutralization process is complicated nonlinear process, and this caused a huge work for wastewater PH neutralization barriers, so this topic to research based on the fuzzy PID control of wastewater PH neutralization process. Hope to get good control effect.Keywords:PH ; Nonlinear; Fuzzy PID; Control system目录摘要 (I)ABSTRACT (II)第一章绪论 (1)1.1课题背景及意义 (1)1.2课题研究现状 (1)1.3本文研究内容 (2)第二章污水类型及中和模型的建立 (3)2.1污水类型 (3)2.2PH中和过程 (3)2.3PH中和滴定曲线 (4)2.4PH中和动态模型 (5)第三章模糊PID控制原理 (8)3.1PID控制原理 (8)3.2模糊控制的基本原理 (8)3.3模糊PID (9)第四章模糊PID控制器设计与仿真 (11)4.1模糊控制器 (11)4.2模糊PID控制器 (12)4.3模糊PID控制器设计 (12)4.3.1 模糊控制器规则 (13)4.3.2 模糊推理机制 (15)4.3.3 解模糊策略 (16)4.4S IMULINK仿真模型搭建 (16)4.4.1 Simulink仿真结果分析 (17)结语 (19)致谢 (20)参考文献 (21)第一章绪论1.1 课题背景及意义水资源是城市生产生活的重要部分,可以说一个城市如果没有足够的水资源,那么这个城市的发展将难以为继,从历史上的古代著名城市选址上可以看出水资源对于一个城市形成和发展的重要性。