哈尔滨工业大学《801控制原理(覆盖现代控制理论)》历年考研真题汇编(含部分答案)
- 格式:pptx
- 大小:11.58 MB
- 文档页数:5
目 录
2013年哈尔滨工业大学801控制原理考研真题
2012年哈尔滨工业大学801控制原理考研真题
2011年哈尔滨工业大学801控制原理考研真题
2010年哈尔滨工业大学801控制原理考研真题
2009年哈尔滨工业大学801控制原理考研真题
2008年哈尔滨工业大学801控制原理考研真题及详解
2007年哈尔滨工业大学401控制原理考研真题及详解
2006年哈尔滨工业大学401控制原理考研真题
2004年哈尔滨工业大学控制原理考研真题
2000年哈尔滨工业大学控制原理考研真题
2013年哈尔滨工业大学801控制原理考研真题。
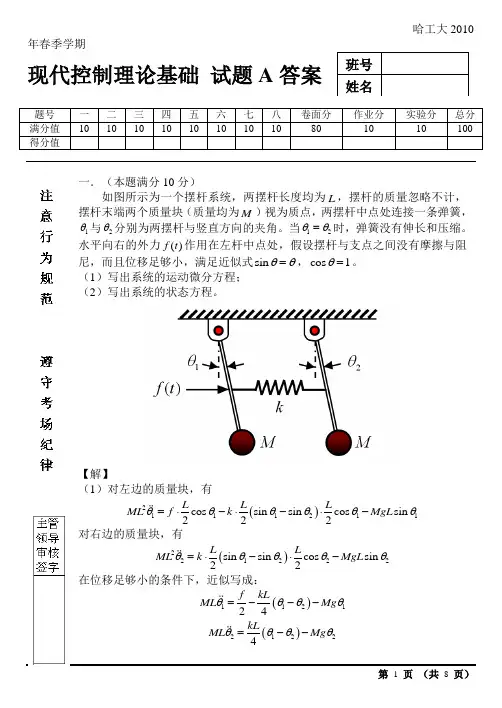
哈工大2010年春季学期现代控制理论基础 试题A 答案题号 一 二 三 四 五 六 七 八 卷面分 作业分 实验分 总分 满分值 10 10 10 10 10 10 10 10 80 10 10 100 得分值第 1 页 (共 8 页)班号 姓名一.(本题满分10分)如图所示为一个摆杆系统,两摆杆长度均为L ,摆杆的质量忽略不计,摆杆末端两个质量块(质量均为M )视为质点,两摆杆中点处连接一条弹簧,1θ与2θ分别为两摆杆与竖直方向的夹角。
当12θθ=时,弹簧没有伸长和压缩。
水平向右的外力()f t 作用在左杆中点处,假设摆杆与支点之间没有摩擦与阻尼,而且位移足够小,满足近似式sin θθ=,cos 1θ=。
(1)写出系统的运动微分方程; (2)写出系统的状态方程。
【解】(1)对左边的质量块,有()2111211cos sin sin cos sin 222L L LML f k MgL θθθθθθ=⋅-⋅-⋅-对右边的质量块,有()221222sin sin cos sin 22L LML k MgL θθθθθ=⋅-⋅-在位移足够小的条件下,近似写成:()112124f kLML Mg θθθθ=---()21224kLML Mg θθθθ=--即112442kg k f M L M ML θθθ⎛⎫=-+++⎪⎝⎭ 21244k k g M M L θθθ⎛⎫=-+ ⎪⎝⎭(2)定义状态变量11x θ=,21x θ=,32x θ=,42x θ=则122133441344244x x k g k fx x x M L M ML x x k kg x x x M M L =⎧⎪⎛⎫⎪=-+++ ⎪⎪⎝⎭⎨=⎪⎪⎛⎫=-+⎪ ⎪⎪⎝⎭⎩或写成1122334401000014420001000044x x k g k x x M L Mf ML x x x x k kg M M L ⎡⎤⎡⎤⎢⎥⎡⎤⎡⎤⎛⎫⎢⎥⎢⎥-+⎢⎥⎢⎥ ⎪⎢⎥⎢⎥⎝⎭⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎛⎫⎣⎦⎣⎦⎢⎥-+⎣⎦⎢⎥ ⎪⎢⎥⎝⎭⎣⎦二.(本题满分10分)设一个线性定常系统的状态方程为=x Ax ,其中22R ⨯∈A 。

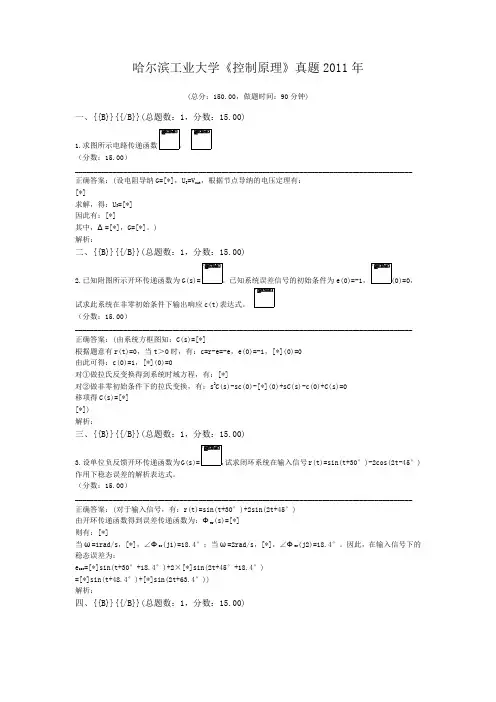
哈尔滨工业大学《控制原理》真题2011年(总分:150.00,做题时间:90分钟)一、{{B}}{{/B}}(总题数:1,分数:15.00)1.求图所示电路传递函数。
(分数:15.00)__________________________________________________________________________________________ 正确答案:(设电阻导纳G=[*],U3=V out,根据节点导纳的电压定理有:[*]求解,得:U3=[*]因此有:[*]其中,Δ=[*],G=[*]。
)解析:二、{{B}}{{/B}}(总题数:1,分数:15.00)2.已知附图所示开环传递函数为G(s)=。
已知系统误差信号的初始条件为e(0)=-1,(0)=0,试求此系统在非零初始条件下输出响应c(t)表达式。
(分数:15.00)__________________________________________________________________________________________ 正确答案:(由系统方框图知:C(s)=[*]根据题意有r(t)=0,当t>0时,有:c=r-e=-e,e(0)=-1,[*](0)=0由此可得:c(0)=1,[*](0)=0对①做拉氏反变换得到系统时域方程,有:[*]对②做非零初始条件下的拉氏变换,有:s2C(s)-sc(0)-[*](0)+sC(s)-c(0)+C(s)=0移项得C(s)=[*][*])解析:三、{{B}}{{/B}}(总题数:1,分数:15.00)3.设单位负反馈开环传递函数为试求闭环系统在输入信号r(t)=sin(t+30°)-2cos(2t-45°)作用下稳态误差的解析表达式。
(分数:15.00)__________________________________________________________________________________________ 正确答案:(对于输入信号,有:r(t)=sin(t+30°)+2sin(2t+45°)由开环传递函数得到误差传递函数为:Φer(s)=[*]则有:[*]当ω=1rad/s,[*],∠Φer(j1)=18.4°;当ω=2rad/s,[*],∠Φer(j2)=18.4°。
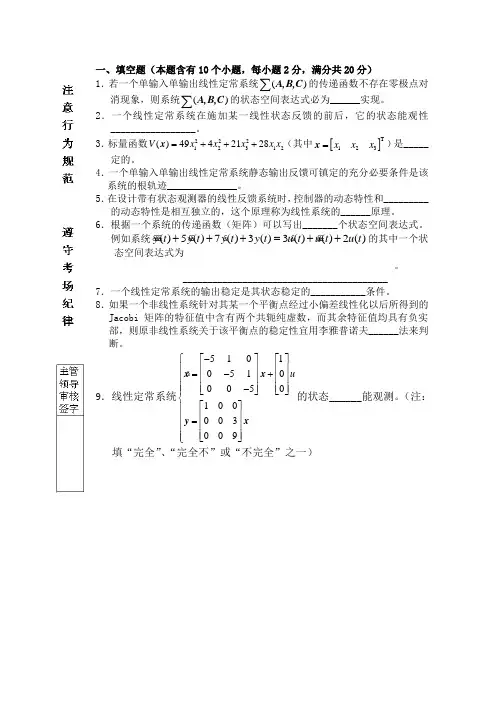
一、填空题(本题含有10个小题,每小题2分,满分共20分)1.若一个单输入单输出线性定常系统∑)(C B,A,的传递函数不存在零极点对消现象,则系统∑)(C B,A,的状态空间表达式必为______实现。
2.一个线性定常系统在施加某一线性状态反馈的前后,它的状态能观性_________________。
3.标量函数22212312()4942128V x x x x x =+++x (其中[]T123x x x =x )是_____定的。
4.一个单输入单输出线性定常系统静态输出反馈可镇定的充分必要条件是该系统的根轨迹______________。
5.在设计带有状态观测器的线性反馈系统时,控制器的动态特性和_________的动态特性是相互独立的,这个原理称为线性系统的______原理。
6.根据一个系统的传递函数(矩阵)可以写出_______个状态空间表达式。
例如系统()5()7()3()3()()2()y t y t y t y t u t u t u t +++=++&&&&&&&&&的其中一个状 态空间表达式为。
_________________________________________7.一个线性定常系统的输出稳定是其状态稳定的___________条件。
8.如果一个非线性系统针对其某一个平衡点经过小偏差线性化以后所得到的Jacobi 矩阵的特征值中含有两个共轭纯虚数,而其余特征值均具有负实部,则原非线性系统关于该平衡点的稳定性宜用李雅普诺夫______法来判断。
9.线性定常系统510105100050100003009u ⎧-⎡⎤⎡⎤⎪⎢⎥⎢⎥=-+⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥-⎪⎣⎦⎣⎦⎨⎡⎤⎪⎢⎥⎪=⎢⎥⎪⎢⎥⎪⎣⎦⎩x x y x &的状态______能观测。
(注:填“完全”、“完全不”或“不完全”之一)10.已知2212212315541554()915541554s s s s s s s s s s s -+⎡⎤⎢⎥++++-=⎢⎥⎢⎥-⎢⎥++++⎣⎦I A ,其中I 表示2阶单位矩阵,则有t e A =________________。