基于51单片机红外无线遥控智能小车控制设计
- 格式:docx
- 大小:37.67 KB
- 文档页数:3

基于单片机的红外遥控智能小车设计报告毕业设计(论文)题目:基于单片机的红外遥控智能小车西安邮电学院毕业设计(论文)任务书学生姓名指导教师职称工程师学院电子工程学院系部光电子技术专业光电信息工程题目基于单片机的红外遥控智能小车任务与要求任务:以51单片机为控制核心,实现具有自动避障、加速、减速等功能的红外遥控智能小车。
要求:1 搜集资料,熟悉单片机开发流程;熟悉红外传感器等相关器件;掌握单片机接口和外围电路应用;具备一定的单片机开发经验。
2 学会电路设计、仿真等相关软件的使用;3 具备一定的硬件调试技能。
4 学会查阅资料;5 学会撰写科技论文。
开始日期2010年3月22日完成日期2010年6月27日主管院长(签字) 年月日西安邮电学院毕业设计 (论文) 工作计划学生姓名赵美英指导教师崔利平职称工程师学院电子工程学院系部光电子技术专业光电信息工程题目基于单片机的红外遥控智能小车工作进程主要参考书目(资料)1、何立民,单片机应用系统设计,北京:航天航空大学出版社;2、李广弟,单片机基础,北京:北京航空航天大学出版社,2001;3、何立民,MCS-51系列单片机应用系统设计系统配置与接口技术,北京航空航天大学出版社,1990.01;4、赵负图,传感器集成电路手册,第一版,化学工业出版社,2004;5、Atmel.AT89S51数据手册.主要仪器设备及材料1.普通计算机一台,单片机开发环境;2.电路安装与调试用相关仪器和工具。
(如示波器、万用表、电烙铁、镊子、钳子等)。
论文(设计)过程中教师的指导安排每周四进行交流与总结;其余时间灵活安排,及时解决学生问题。
对计划的说明依学生实际情况,适当调整工作进度。
西安邮电学院毕业设计(论文)开题报告电子工程学院光电子技术系(部)光电信息工程专业2006 级光电0601班课题名称:基于单片机的红外遥控智能小车学生姓名:赵美英学号:05064028指导教师:崔利平报告日期: 2010年3月25日说明:本报告必须由承担毕业论文(设计)课题任务的学生在毕业论文(设计) 正式开始的第1周周五之前独立撰写完成,并交指导教师审阅。

基于51单片机的红外遥控小车设计和制作红外遥控小车设计和制作是一个有趣且实用的项目。
本文将介绍一个基于51单片机的红外遥控小车的设计方案和制作过程。
设计方案:1.硬件设计:-采用STC89C52单片机作为控制核心,具有良好的性能和稳定性。
-红外接收器模块:用于接收红外信号并将其转换为电信号。
-直流电机:用于驱动小车的轮子,实现前进、后退、转弯等动作。
-驱动电路:将单片机的输出信号转换为合适的电流和电压来驱动电机。
-电源:使用锂电池作为电源,提供所需的电能。
2.软件设计:-红外信号解码:将接收到的红外信号进行解码,并判断是前进、后退、转弯等命令。
-控制逻辑:根据解码结果产生相应的电信号,驱动电机实现小车的相应动作。
-响应机制:处理红外信号的时延和干扰,避免误操作或信号丢失。
制作过程:1.连接电路:-将STC89C52单片机与电源、红外接收器模块和驱动电路连接。
确保连接正确、稳定。
-连接直流电机和驱动电路,通过电路板或者线缆进行连接,确保电机可以正确驱动。
2.烧录程序:- 使用Keil C编译器编写控制程序,并将程序通过编程器烧录到STC89C52单片机中。
3.完善控制逻辑:-在控制程序中添加红外信号解码和控制逻辑代码,使小车能够根据接收到的红外信号做出相应动作。
4.调试和测试:-将红外遥控器对准红外接收器模块,发送不同的红外信号,确保小车能够正确接收和处理信号。
-确保小车能够根据接收到的信号做出正确的动作,如前进、后退、转弯等。
5.完善功能:-可以根据实际需求添加其他功能,如声控、避障、图像识别等,提升小车的智能性和功能性。
通过以上设计和制作过程,一个基于51单片机的红外遥控小车就可以完成。
这个小车可以通过红外遥控器进行远程控制,并实现前进、后退、转弯等动作。
它可以在室内或者室外进行运行,并具有一定的智能性和便携性。
这个项目不仅可以培养学生的动手能力和创造力,还可以加深对电子电路和嵌入式系统的理解和掌握。

基于51单片机的无线遥控小车设计随着科技的不断发展,无线遥控小车已经成为了人们生活中不可或缺的一部分。
无线遥控小车具有控制方便、灵活性高等特点,可以广泛应用于各个领域,如家庭娱乐、工业搬运等。
本文将介绍一种基于51单片机的无线遥控小车设计,并附上相应的代码。
本设计的无线遥控小车由四个轮子、两个直流电机、一个超声波测距模块和一个遥控模块组成。
其中,遥控模块用于接收人们发送的指令,超声波测距模块用于测量小车与障碍物之间的距离,以便避免碰撞。
首先,我们需要连接四个轮子和两个直流电机到51单片机的相应引脚上。
接下来,将超声波测距模块连接到51单片机的一个引脚上,用于接收超声波测距的信号。
最后,将遥控模块接收到的指令转化为电平信号,并将其连接到51单片机的引脚上。
在代码部分,我们首先需要初始化相应的引脚和串口,以便接收和发送指令。
然后,我们需要编写一个函数用于接收遥控模块发送的指令,并根据指令来控制小车的运动。
例如,当接收到前进指令时,小车向前运动;当接收到后退指令时,小车向后运动。
在控制小车运动的同时,我们还需要通过超声波测距模块来检测小车与障碍物之间的距离,以便避免碰撞。
此外,在代码中还需设置一些保护措施,例如在小车运动过程中检测到距离障碍物过近时自动停止前进,或者在接收到无效指令时忽略该指令等。
总结起来,基于51单片机的无线遥控小车设计离不开硬件连接和代码编写两个方面的工作。
合理的硬件连接可以保证信号的稳定传输,而完善的代码编写可以保证小车的正常运行和灵活性。
这种无线遥控小车具有控制方便、灵活性高等优点,可广泛应用于各个领域。
通过不断的优化和改进,无线遥控小车的性能将会更加出色。
基于51单片机WiFi智能小车制作基于51单片机WiFi智能小车制作一、基本原理51单片机WiFi智能小车是利用PC或手机作为控制端,通过手机连接wifi模块(路由器)以获得wifi信号,同时车载也连接wifi模块以获得和手机相同的IP地址,实现手机和小车的连接,然后利用PC或手机上的控制软件以wifi网络信号为载体发送相关信号,wifi模块接收PC 或手机端发送来的相关信号并分析转换成TTL 电平信号,然后发送给单片机,单片机接收到的电平信号处理、分析、计算,转化成控制指令并发送给电机驱动模块以实现小车的前进、后退、左拐、右拐等功能。
二、购买所需材料了解51单片机WiFi智能小车基本原理后,需要购买所需材料进行制作。
下面列出所需制作材料:序号材料备注图例6 小车底盘7 摄像头 根据固件支持摄像头购买8 电源根据自己需要购买种类9 杜邦线及小配件制作所需工具:序号工具名备注图例称1 电烙铁一套 包括松香焊锡2 螺丝刀 平口、十字等3 微型电钻 可以自制4手工刀5 剪刀6 万用表7 热熔胶枪或快干胶8US B下载器三、开始制作1、制作流程开始制作前,我们首先需要看购买路由器的型号,笔者采用的是703n 路由器,所以需要引出ttl 线。
总体步骤为:路由器引TTL 线→路由器刷OpenWrt 固件→制作51单片机最小系统→下载下位机程序到51单片机→安装上位机程序至PC 或手机→测试上、下位机通信→组装→调试完成。
2、路由器引ttl线首先打开703n路由器,按照下图标示位置焊接ttl线。
注意:1、焊接的时候要小心焊接,焊好后微拉下查看松紧2、焊接最好采用软线焊接,防止意外整块拉掉焊点3、焊好后一定用胶固定,最好采用热熔胶下图为引好ttl线样子3 刷OpenWrt固件何为OpenWrt固件,OpenWrt可以被描述为一个嵌入式的Linux 发行版,(主流路由器固件有dd-wrt,tomato,openwrt三类)而不是试图建立一个单一的,静态的系统。

/*预处理命令*/#include<reg52.h> //包含单片机寄存器的头文件#include<intrins.h> //包含_nop_()函数定义的头文件#define uchar unsigned char#define uint unsigned int#define delayNOP(); {_nop_();_nop_();_nop_();_nop_();};sbit IRIN=P3^2; //红外接收器数据线sbit LCD_RS = P0^7;sbit LCD_RW = P0^6;sbit LCD_EN = P0^5;uchar begin[]={"My car!"};uchar cdis1[]={"jiansu!"};uchar cdis2[]={"qianjin!"};uchar cdis3[]={"jiasu!"};uchar cdis4[]={"zuozhuang!"};uchar cdis5[]={"STOP!"};uchar cdis6[]={"youzhuan!"};uchar cdis8[]={"daoche!"};sbit M1 = P1^0;sbit M2 = P1^1;sbit M3 = P1^2;sbit M4 = P1^3;sbit EN12 = P1^4;sbit EN34 = P1^5;uchar IRCOM[7];uchar m,n;uchar t=2;uchar g;uchar code digit[]={"0123456789"};uint v;uchar count;bit flag;void delayxms(uchar t);void delay(unsigned char x) ;void delay1(int ms);void motor();void lcd_display();/*检查LCD忙状态lcd_busy为1时,忙,等待。

51单片机无线遥控小车设计一、引言无线遥控小车是一种基于51单片机的智能小车系统,它利用无线通信技术实现了对小车的遥控。
通过无线遥控,我们可以随时控制小车的方向,实现室内或者室外的移动。
本设计将详细介绍51单片机无线遥控小车的整体设计框架、电路连接和关键模块设计。
二、整体设计框架整个系统分为遥控器端和小车端两个部分。
遥控器端通过按键或者摇杆输入控制指令,经过编码和解码处理后,通过无线传输模块将指令发送给小车端。
小车端接收到指令后,通过解码和控制模块来控制小车的运动。
三、电路连接遥控器端由单片机、按键(或者摇杆)、编码芯片和无线传输模块组成。
按键用于输入控制指令,编码芯片用于将按键输入的模拟信号转换为数字信号,单片机将数字信号进行编码后发送给无线传输模块,最终通过无线通信将指令传输给小车端。
小车端由单片机、解码芯片、电机驱动、电机和无线接收模块组成。
无线接收模块用于接收遥控器端发送过来的指令,解码芯片将数字信号转换为控制信号,单片机根据控制信号来控制电机驱动,从而实现小车的运动。
四、关键模块设计1.编码和解码模块设计编码和解码模块是整个系统中的关键部分,它负责将模拟信号转换为数字信号,并将数字信号转换为控制信号。
2.无线传输模块选择无线传输模块是实现遥控通信的关键组件,我们可以选择使用蓝牙模块、无线射频模块等。
选择合适的无线传输模块需要考虑通信距离、通信速率、功耗等因素。
3.电机驱动模块设计电机驱动模块负责将控制信号转换为电机运动控制信号,驱动电机完成小车的移动。
在设计电机驱动模块时,需要考虑电机的类型和电机驱动电路的选型。
五、总结本设计详细介绍了51单片机无线遥控小车的整体设计框架,电路连接和关键模块设计。
通过对整个设计的理解和实现,我们可以实现对小车的远程遥控,从而实现室内或者室外的自动移动。
这种无线遥控小车系统在娱乐、智能家居、无人巡检等领域都有广泛的应用前景。

基于51单片机的红外遥控书法小车课程设计题目名称:基于51单片机的红外遥控书法小车的设计专业班级:测控1402班学生姓名:赵向前学号: 201423030211 指导教师:周刚刘林芝单片机系统课程设计任务书目录1系统概述 (1)2方案论证 (2)2.1 使用普通直流减速电机 (2)2.2 使用四象八拍步进电机 (2)3硬件设计 (3)3.1系统的原理方框图 (3)3.1.1. 12V直流电源 (3)3.1.2 5V稳压模块 (4)3.1.3.控制系统模块 (4)3.1.4. 红外接收模块 (5)3.1.5. 步进电机驱动 (6)3.1.6. 步进电机 (6)3.2主电路 (8)3.3. I/O分配 (8)3.3. I/O连线图 (8)4软件设计 (8)4.1流程图 (9)4.2源程序 (9)5系统调试 (28)6.使用方法 (28)7.设计心得 (28)参考文献 (29)1系统概述该小车是我在练字时无意间蹦出的一个想法,于是我就想让小车按照固定的轨迹行走,并使其驱动一杆毛笔,不就能让小车也能写出富有艺术的毛笔字了吗?基于这样的构想,我就设计方案制作一辆智能书法小车,后来设计完成后我又加上了红外遥控,于是就做成了最终的基于STC89C52RC单片机的智能红外遥控书法小车。
该作品所要实现的功能如下:1.按照固定的轨迹行走2.能够驱动毛笔写字3.实现红外遥控启动4.非工作模式下进入掉电模式实现低功耗长待机5.使用步进电机控制小车运行速度使其能够平稳稳定运行6.电流失控报警功能,使用LED灯泡实现对总电流及各个模块电流运转情况进行监控显示,电流平稳时,LED灯常亮,当电流出现异常巨大变动时,LED灯闪烁示警各模块参数:1.12V直流总电源供电2. 稳压模块使用L7805器件将12V电源转化为直流5V电源为各个模块供电3. 使用STC89C52RC单片机作为控制芯片4. 使用ULN2003芯片作为步进电机驱动5. 使用28BYT-48-5VDC永磁式直流5V四相八拍减速步进电机作为发动机6. 使用28BYT-48-5VDC永磁式直流5V四相八拍减速步进电机作为毛笔驱动2.方案论证2.1方案一:采用普通直流减速电机直流减速电机作为最常用的直流电机又有着控制简单,速度快等特点,但是在我们的智能书法小车上如果使用这种电机的话,就会出现很多的问题,其中,速度过快,很难精确地控制小车的位移,其次,普通直流减速电机的力矩较小,难以实现快速改变其运动轨迹的要求,所以,总的来说,使用普通直流减速电机并不合适,将之摒弃。


基于51单片机的红外遥控小车设计和制作本文介绍一款红外线遥控小车,以AT89S51单片机为核心控制器,用L289驱动直流电机工作,控制小车的运行。
本款小车具有红外线遥控手动驾驶、自动驾驶、寻迹前进等功能。
本系统采用模块化设计,软件用C语言编写。
一、设计任务和要求以AT98C51单片机为核心,制作一款红外遥控小车,小车具有自动驾驶,手动驾驶和循迹前进等功能。
自动驾驶时,前进过程中可以避障。
手动驾驶时,遥控控制小车前进、后退、左转、右转、加速等操作。
寻迹前进时小车还可以按照预先设计好的轨迹前进。
二、系统组成及工作原理本系统由硬件和软件两部分组成。
硬件部分主要完成红外编码信号的发射和接受、障碍物检测、轨迹检测、直流电机运行的发生等功能。
软件主要完成信号的检测和处理、设备的驱动及控制等功能。
AT89S51单片机查询红外信号并解码,查询各个检测部分输入的信号,并进行相应处理,包括电机的正反转,判断是否遇到障碍物,判断是否小车其那金中有出轨等。
系统结构框图如图1所示。
图1 系统结构框图三、主要硬件电路1、遥控发射器电路该电路的主要控制器件为遥控器芯片HT6221,如图2所示。
HT6221将红外码调制成38KHZ的脉冲信号通过红外发射二极管发出红外编码。
图2中D1是红外发射二极管,D2是按键指示灯,当有按键按下时D2点亮。
HT6221的编码规则是:当一个键按下超过36ms,振荡器使芯片激活,如果这个按键按下且延迟大约108ms,这108ms发射代码由一个起始码(9ms),一个结果码(4.5ms),低8位地址码(9ms~18ms),高8位地址码(9~18ms),8位数据码(9~18ms)和这8位数据码的反码(9~18ms)组成,如果按键按下超过108ms仍未松开,接下来发射的代码将仅由起始码(9ms)和结束码(2.5ms)组成。
按照上图的接法,K1~K8的数据码分别为:0x00,0x01,0x02,0x03,0x04,0x05,0x06,0x07。

基于单片机的红外遥控智能小车设计引言:随着科技的不断发展,智能物联网已经走进了我们的生活。
智能小车作为一种智能化的产品,能够实现远程遥控、自动避障等功能,受到了广大消费者的青睐。
本文就基于单片机的红外遥控智能小车设计进行详细介绍。
一、设计目标本设计的目标是通过红外遥控,实现对智能小车的远程控制,小车能够根据收到的指令进行行驶、避障等操作。
二、设计原理1.主控芯片:本设计使用单片机作为主控芯片,常用的单片机有51系列、AVR系列等,可根据实际需求选择合适的芯片型号。
2.红外遥控模块:红外遥控模块是实现红外通信的设备,可以将遥控器发出的红外信号解码成数据,实现遥控操作。
3.电机驱动模块:电机驱动模块可将单片机的PWM信号转化为电机的动力驱动信号,控制小车的行驶方向和速度。
4.超声波传感器:超声波传感器可以感知到小车前方的障碍物距离,根据测得的距离,进行相应的避障操作。
5.电源模块:小车需要使用适当的电源,通常是锂电池或者直流电源供应。
三、系统设计1.硬件设计:(1)搭建小车底盘:根据所选择的底盘,搭建小车结构,并安装好电机驱动模块、电源模块等硬件设备。
(2)连接电路:将红外遥控模块、超声波传感器等硬件设备与主控芯片进行连接,确保每个模块正常工作。
2.软件设计:(1)红外遥控程序设计:通过红外遥控模块接收红外信号,并解码成相应的指令。
根据指令控制电机驱动模块,实现小车的行驶方向和速度控制。
(2)超声波避障程序设计:根据超声波传感器测得的距离,判断是否有障碍物,如果有障碍物就停止或者转向。
四、实验结果和讨论经过实验验证,本设计的红外遥控智能小车能够准确接收红外信号,并根据指令控制小车的行驶方向和速度。
同时,超声波传感器能够及时感知到前方的障碍物,并进行相应的避障操作。
然而,该设计仍然存在一些不足之处,比如超声波传感器的测距范围有限,可能无法感知到较小的障碍物。
此外,红外遥控信号的传输距离也有一定限制,需要保持遥控器与小车之间的距离不过远。
基于51单片机红外遥控小车制作报告基于51单片机红外遥控小车是一项有趣且有挑战性的项目,通过该项目的实践,可以深入了解单片机和红外遥控的原理,并提高自己的动手能力和解决问题的能力。
本文将介绍基于51单片机红外遥控小车的制作过程和实现的功能。
一、实验原理1.51单片机原理51单片机是一种广泛应用于电子产品和嵌入式系统中的微控制器,采用的是哈佛结构,具有较高的性能和稳定性,广泛使用于工业自动化和嵌入式开发中。
2.红外遥控原理红外遥控是一种常见的遥控方式,通过使用红外光发射器和接收器之间的通信,实现无线遥控设备的功能。
红外遥控信号一般由多个比特组成的数据包,通过不同的数据包可以实现不同的操作。
二、实验器材和工具1.器材2个电机、L298N电机驱动模块、51单片机、红外接收器、红外发射器、遥控器、电池盒、杜邦线等。
2.工具电烙铁、焊锡、剪线钳、螺丝刀、万用表等。
三、制作步骤1.电路连接将L298N电机驱动模块与电机连接,L298N模块的输入引脚与单片机的输出引脚连接,红外接收器与单片机的IO引脚连接,红外发射器与单片机的IO引脚连接。
2.程序设计根据需求编写程序,包括红外遥控信号解析、电机控制等功能。
3.调试测试四、实现的功能1.红外信号解析通过红外接收器接收到遥控器发送的红外信号,解析信号中的数据包,判断用户的操作。
2.基本运动控制根据用户的操作,通过控制电机的转动方向和速度,实现小车的前进、后退、左转、右转等基本运动功能。
3.灵敏度调节通过调整程序中的参数,可以调节小车的灵敏度,使其对用户的操作更加敏感和准确。
4.智能避障在程序中添加红外避障功能,当小车检测到前方有障碍物时,自动停下或转向避开障碍物,保证小车的安全。
五、实验心得通过制作基于51单片机红外遥控小车的实验,我深入了解了51单片机和红外遥控的原理,并提高了自己的动手能力和解决问题的能力。
在实验过程中遇到了一些困难,但通过查阅资料和与同学交流,我成功地解决了这些问题。
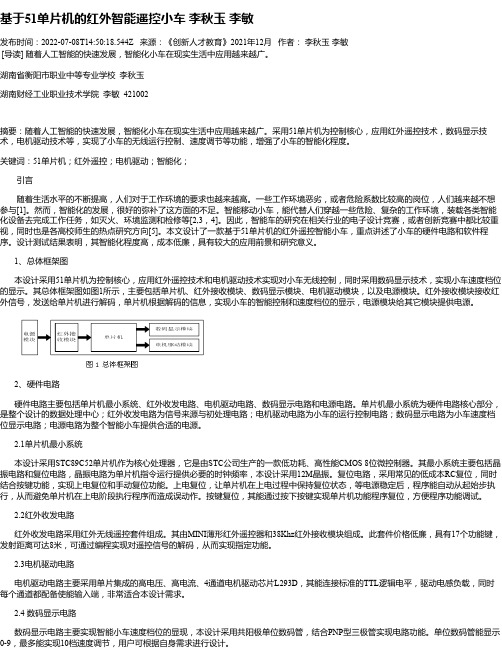
基于51单片机的红外智能遥控小车李秋玉李敏发布时间:2022-07-08T14:50:18.544Z 来源:《创新人才教育》2021年12月作者:李秋玉李敏[导读] 随着人工智能的快速发展,智能化小车在现实生活中应用越来越广。
湖南省衡阳市职业中等专业学校李秋玉湖南财经工业职业技术学院李敏 421002摘要:随着人工智能的快速发展,智能化小车在现实生活中应用越来越广。
采用51单片机为控制核心,应用红外遥控技术,数码显示技术,电机驱动技术等,实现了小车的无线运行控制、速度调节等功能,增强了小车的智能化程度。
关键词:51单片机;红外遥控;电机驱动;智能化;引言随着生活水平的不断提高,人们对于工作环境的要求也越来越高。
一些工作环境恶劣,或者危险系数比较高的岗位,人们越来越不想参与[1]。
然而,智能化的发展,很好的弥补了这方面的不足。
智能移动小车,能代替人们穿越一些危险、复杂的工作环境,装载各类智能化设备去完成工作任务,如灭火、环境监测和检修等[2,3,4]。
因此,智能车的研究在相关行业的电子设计竞赛,或者创新竞赛中都比较重视,同时也是各高校师生的热点研究方向[5]。
本文设计了一款基于51单片机的红外遥控智能小车,重点讲述了小车的硬件电路和软件程序。
设计测试结果表明,其智能化程度高,成本低廉,具有较大的应用前景和研究意义。
1、总体框架图本设计采用51单片机为控制核心,应用红外遥控技术和电机驱动技术实现对小车无线控制,同时采用数码显示技术,实现小车速度档位的显示。
其总体框架图如图1所示,主要包括单片机、红外接收模块、数码显示模块、电机驱动模块,以及电源模块。
红外接收模块接收红外信号,发送给单片机进行解码,单片机根据解码的信息,实现小车的智能控制和速度档位的显示,电源模块给其它模块提供电源。
2、硬件电路硬件电路主要包括单片机最小系统、红外收发电路、电机驱动电路、数码显示电路和电源电路。
单片机最小系统为硬件电路核心部分,是整个设计的数据处理中心;红外收发电路为信号来源与初处理电路;电机驱动电路为小车的运行控制电路;数码显示电路为小车速度档位显示电路;电源电路为整个智能小车提供合适的电源。

工业职业技术学院毕业设计课题名称—基于51与单片机的智能小车控制系统__________________________系(院)名称________________ 电气工程系_____________________ 专业及班级___________________________________________________ 学生_______________________________________________学号_______________________________________________指导教师___________________________________________________完成日期年11 月19 日随着我国科学技术的进步,智能化作为现代社会的新产物开始越来越普及,各种高科技也广泛应用于智能小车和机器人玩具制造领域,使智能机器人越来越多样化。
智能小车是一个多种高薪技术的集成体,它融合了机械、电子、传感器、计算机硬件、软件、人工智能等许多学科的知识,可以涉及到当今许多前沿领域的技术。
整个小车平台主要以51单片机为控制核心,通过无线遥控实现前进后退和转向行驶,通过红外线传感器,实现小车的自适应巡航、避障等功能。
设计采用对比选择,模块独立,综合处理的研究方法。
通过翻阅大量的相关文献资料,分析整理出有关信息,在此基础上列出不同的解决方案,结合实际情况对比方案优劣选出最优方案进行设计。
从电机车体,最小系统到无线遥控,红外线对管的自动寻迹再到红外线自动避障和语音控制,完成各模块设计。
通过调试检测各模块,得到正确的信号输出,实现其应有的功能。
最后将各个调试成功的模块结合到小车的车体上,结合程序,通过单片机的控制,将各模块有效整合在一起,达到所预期的目标,完成最终设计与制作,能使小车在一定的环境中智能化运转。
关键字:智能小车,单片机,红外传感器。
目录第一章绪论......................................................................... -1 -1.1.1 智能循迹小车概述....................................................... -1 -1.1.2课题研究的目的和意义 ................................................... -2 -1.1.3 智能循迹小车智能循迹分类............................................... -2 -1.1.4 智能循迹小车的应用..................................................... -3 -第二章方案设计..................................................... 错误!未定义书签。

基于51单片机的红外遥控小车设计初稿设计初稿:基于51单片机的红外遥控小车一、引言随着科技的发展,遥控小车成为了儿童玩具市场上的一大热门。
遥控小车的设计不仅考虑到了玩乐性,还考虑到了教育性,可以培养儿童的动手能力和逻辑思维能力。
本文基于51单片机,设计了一款红外遥控小车,以满足儿童的玩乐需求。
二、系统设计1.系统功能设计:本系统的主要功能是通过红外遥控器控制小车的运动,包括前进、后退、左转、右转。
2.硬件设计:主控芯片:选用51单片机作为主控芯片,具有较好的性能和稳定性。
红外接收模块:接收红外信号并将信号转换为数字信号,以供单片机处理。
电机驱动模块:用于控制小车的运动方向和速度。
电源模块:提供系统所需的电源电压。
车身模块:包括小车的车身、轮子。
3.软件设计:使用Keil C编程语言编写程序,实现功能的具体控制。
程序主要分为红外信号接收、数据解码、电机控制等模块。
三、工作原理1.红外信号接收:通过红外接收模块接收红外信号,将信号转换为数字信号。
2.数据解码:通过程序对接收到的数字信号进行解码,将信号转换为指令,如前进、后退、左转、右转。
3.电机控制:根据解码得到的指令,控制电机驱动模块,实现小车的运动。
四、实验结果与分析在实验中,我们使用了51单片机和红外接收模块来控制小车的运动。
通过红外遥控器发送不同的指令,小车可以做出相应的动作。
经过实验,我们发现系统设计能够满足预期的功能。
红外遥控小车的控制灵敏度较高,操作简单,容易上手。
五、总结与展望本设计初稿基于51单片机的红外遥控小车,实现了通过红外遥控信号控制小车的运动。
该系统技术上相对成熟,功能完善,可以作为儿童玩具市场的一种选择。
然而,还存在一些不足之处,例如电池寿命较短、遥控距离有限等。
在后续的设计中,我们将进一步优化电源模块,延长电池寿命,并尝试添加更多有趣的功能。
总之,基于51单片机的红外遥控小车设计初稿已经基本完成,未来还可以对该系统进行进一步开发,以满足不同需求的儿童。
基于51单片机红外无线遥控智能小车控制设
计
摘要:
本文利用51单片机设计了一款具有红外无线遥控功能的智能小车控制系统。
该系统基于红外技术,实现了对智能小车的远程控制。
通过建立遥控信号传输模型和小车控制模块,实现了智能小车的实时运动控制,包括前进、后退、左转、右转等操作。
本文详细介绍了系统设计方案、硬件设计和软件设计,通过实验验证,证明该系统能够稳定地实现智能小车的远程控制,具有一定的应用价值和推广前景。
关键词:
51单片机;红外无线遥控;智能小车控制;遥控信号传输模型
Abstract:
In this paper, a smart car control system with infrared wireless remote control function based on 51 single-chip microcomputer is designed. The system is based on infrared technology, which realizes the remote control of the smart car. By establishing the remote control signal transmission model and the car control module, real-time motion control of the smart car, including forward, backward, turning left and turning right, is realized. This paper introduces the system design scheme, hardware design and software design in detail. Through experiments, it is proved that the system can stably realize the remote control of the smart car, and has certain application value and promotion prospects.
Keywords:
51 single-chip microcomputer; infrared wireless remote control; smart car control; remote control signal
transmission model
1. 引言
智能小车控制系统是一种目前比较受关注的智能化系统,在智能出行和智慧交通中有着广泛的应用。
红外无线遥控技术作为一种常用的远程控制技术,已经被广泛应用在各种智能化系统中。
本文利用51单片机设计了一款具有红外无线遥控功能的智能小车控制系统,其主要目的是实现对智能小车的远程控制,解决目前市场上存在的一些不便之处。
2. 系统设计方案
智能小车控制系统主要包括红外遥控模块、小车控制模块和电源模块。
其中,红外遥控模块负责接收遥控信号,并将信号传递给小车控制模块;小车控制模块则负责接收信号并实现小车的运动控制;电源模块则负责为整个系统提供电源。
系统设计图如图1所示:
(Insert Figure 1 here)
图1 智能小车控制系统设计图
3. 硬件设计
红外遥控模块包括红外接收头和信号解码电路。
红外接收头可以在一定范围内接收到红外遥控信号,并将信号传递给信号解码电路。
信号解码电路可以将接收到的信号进行解码,并将解码后的信号传递给小车控制模块。
小车控制模块包括电机驱动模块、控制单元和传感器模块。
电机驱动模块负责控制电机的正反转;控制单元负责解析接收到的信号,并根据信号进行相应的控制操作;传感器模块则负责感知小车周围环境,并根据感知结果进行相应的调整。
4. 软件设计
红外遥控模块和小车控制模块之间的通信主要采用中断方式。
当红外遥控模块接收到信号时,会触发外部中断,从而通知小车控制模块进行相应的控制操作。
小车控制模块主要使用C语言进行编程。
在程序设计时,需要根据红外遥控模块接收到的信号进行解析,确定需要进行的相应操作,
并控制电机驱动模块实现对小车的相应运动控制。
5. 实验结果
利用硬件电路和软件程序设计,制作了一款具有红外无线遥控功能的智能小车控制系统,实现了对智能小车的远程控制。
在实验中,通过按下遥控器上的相应按键,可以实现小车的前进、后退、左转和右转等操作,运动效果稳定,实现快速、准确的控制。
6. 结论与展望
本文利用51单片机设计了一款具有红外无线遥控功能的智能小车控制系统,实现了对智能小车的远程控制。
系统采用红外技术实现遥控信号的传输,并通过中断方式实现小车控制模块与红外遥控模块之间的通讯。
实验结果表明,系统具有稳定的运行效果和良好的控制精度,具有一定的应用价值和推广前景。
在以后的研究中,可以进一步优化系统的硬件和软件设计,提高系统的功能和性能。