传送带效率问题的数学模型
- 格式:doc
- 大小:147.00 KB
- 文档页数:5
专题5传送带模型的结论总结(总7页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--关于传送带传送物体的结论总结1. 基本道具:传送带(分水平和倾斜两种情形)、物件(分有无初速度两种情形)2. 问题基本特点:判断能否送达、离开速度大小、历时、留下痕迹长度等等。
3. 基本思路:分析各阶段物体的受力情况,并确定物件的运动性质(由合外力和初速度共同决定,即动力学观点)4. 典型事例: 一、 水平传送带例1:如图所示,设两半径均为R 的皮带轮轴心间距离为L ,物块与传送带间的动摩擦因素为μ.物块(可视为质点)质量为m ,从水平以初速度v 0滑上传送带左端。
试讨论物体在传送带上留下的痕迹(假设物块为深色,传送带为浅色)(一)若传送带静止不动,则可能出现:1、v 0=gL μ2,恰好到达右端,v t =0,历时t =gv μ0, 留下痕迹△S=L2、v 0﹥gL μ2,从右端滑离,v t =L v g 220μ-,历时t =ggLμμ2v v 200--,留下痕迹△S=L3、v 0<gL μ2,只能滑至离左端S =g v μ22处停下,v t =0,历时t =g v μ0,留下痕迹△S=S =gv μ22(二)若传送带逆时针以速度匀速运动,可能出现: 1、v 0=gL μ2恰好能(或恰好不能)到达右端,v t =0,历时t =gv μ0,留下痕迹长△S 有两种情形:(1)当v <0)2(v gR L μπ+时,△S=vt+L =gv v μ0⋅+L ;(2)当v ≥)2(v gR L μπ+时,△S =2(L +πR _){注意:痕迹长至多等于周长,不能重复计算}。
2、v 0﹥gL μ2,从右端滑出,v t =L v g 220μ-,历时t =ggLμμ2v v 200--,留下的痕迹长△S 也有两种情形:(1)当v <tRL π2+时,△S =vt +L ;(2)当v ≥tRL π2+时,△S =2(L +πR ) 3、v 0<gL μ2,物块先向右匀减速至离左端S =gv μ220处,速度减为零,历时t 1=gv μ0,之后, (1)如果v 0≤v ,物块将一直向左匀加速运动,最终从左端滑落,v t =v 0,又历时t 2=t 1,留下的痕迹长△S =2vt 1(但至多不超过2L +2πR )。

传送带模型公式推导水平传送带模型1、传送带以速度v顺时针转动,在传送带左端无初速度的放一个滑块,设传送带与滑块之间的动摩擦因数为μ,如下图。
分析:对滑块受力分析可知,开始由于滑块的速度小于传送带的速度,导致滑块相对传送带会向左运动,所以滑块受到的滑动摩擦力水平向右,使滑块向右做匀加速运动,加速度的大小为μg,如果传送带足够长,滑块将加速到与传送带速度相等时,然后与传送带一起向右做匀速直线运动,整个过程中滑块加速的时间t=v/μg。
(1)当传送带足够长,滑块将先做匀加速运动,后做匀速运动。
(2)当传送带长度不够,滑块将一直做匀加速直线运动,传送带的临界长度L=v/2μg。
2、顺时针匀速转动的传送带上,放上一定速度的物块,物块初速度水平向右,设传送带与物块之间的动摩擦因数为μ,如下图。
分析:因为物块所受的摩擦力方向与物块和传送带之间的速度大小有关,这种情况肯定得分情况讨论。
(1)如果V物>V带,物块开始将向右做匀减速直线运动,如果传送带不够长,物块将一直减速到传送带右端;如果传送带足够长,物块将首先减速到与传送带速度相等,然后与传送带一起匀速。
(2)如果V物<V带,物块开始将向右做加速运动,如果传送带不够长,物块将一直加速到传送带右端;如果传送带足够长,物块将首先加速速到与传送带速度相等,然后与传送带一起匀速。
3、逆时针匀速转动的传送带上,放上一定速度的物块,物块初速度水平向右,设传送带与物块之间的动摩擦因数为μ,如下图。
分析:像这种也要分情况讨论。
(1)当传送带较短时,物块将一直做匀减速运动到传送带的右端。
(2)当传送带足够长时,物块先向右做匀减速直线运动到速度为零,然后反向做加速运动,直到速度与传送带速度相等,然后一起向左匀速运动。
思考:如果开始物块在传送带的最左端,传送带也是足够长,那么物块的运动情况如何?答:如果物块在最左端,物块先向右做匀减速到零,如果V物>V带,那么物块向右减速到零以后,将向左先做匀加速运动,然后与传送带一起向左运动到最左端。
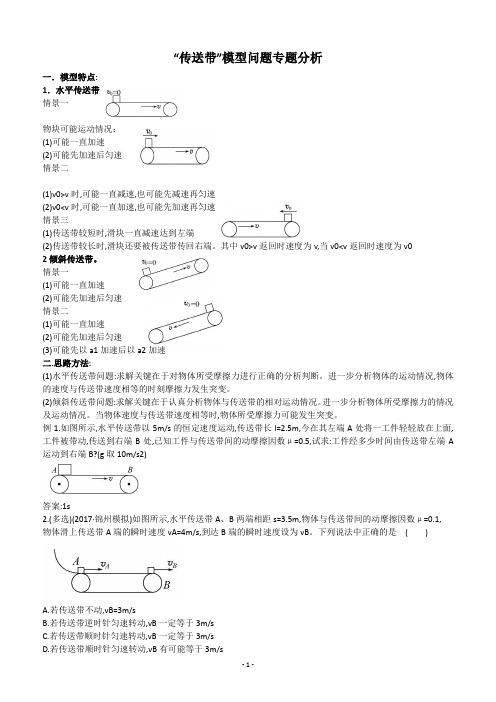
“传送带”模型问题专题分析一.模型特点:1.水平传送带情景一物块可能运动情况:(1)可能一直加速(2)可能先加速后匀速情景二(1)v0>v时,可能一直减速,也可能先减速再匀速(2)v0<v时,可能一直加速,也可能先加速再匀速情景三(1)传送带较短时,滑块一直减速达到左端(2)传送带较长时,滑块还要被传送带传回右端。
其中v0>v返回时速度为v,当v0<v返回时速度为v02倾斜传送带。
情景一(1)可能一直加速(2)可能先加速后匀速情景二(1)可能一直加速(2)可能先加速后匀速(3)可能先以a1加速后以a2加速二.思路方法:(1)水平传送带问题:求解关键在于对物体所受摩擦力进行正确的分析判断。
进一步分析物体的运动情况,物体的速度与传送带速度相等的时刻摩擦力发生突变。
(2)倾斜传送带问题:求解关键在于认真分析物体与传送带的相对运动情况。
进一步分析物体所受摩擦力的情况及运动情况。
当物体速度与传送带速度相等时,物体所受摩擦力可能发生突变。
例1.如图所示,水平传送带以5m/s的恒定速度运动,传送带长l=2.5m,今在其左端A处将一工件轻轻放在上面,工件被带动,传送到右端B处,已知工件与传送带间的动摩擦因数μ=0.5,试求:工件经多少时间由传送带左端A 运动到右端B?(g取10m/s2)答案:1s2.(多选)(2017·锦州模拟)如图所示,水平传送带A、B两端相距s=3.5m,物体与传送带间的动摩擦因数μ=0.1,物体滑上传送带A端的瞬时速度vA=4m/s,到达B端的瞬时速度设为vB。
下列说法中正确的是()A.若传送带不动,vB=3m/sB.若传送带逆时针匀速转动,vB一定等于3m/sC.若传送带顺时针匀速转动,vB一定等于3m/sD.若传送带顺时针匀速转动,vB有可能等于3m/s【解析】选A、B、D总结:(一)受力分析:传送带模型中要注意摩擦力的突变(发生在v物与v带相同的时刻),对于倾斜传送带模型要分析mgsinθ与f的大小与方向。


传送带模型(一)——传送带与滑块滑块与传送带相互作用的滑动摩擦力,是参与改变滑块运动状态的重要原因之一。
其大小遵从滑动摩擦力的计算公式,与滑块相对传送带的速度无关,其方向取决于与传送带的相对运动方向,滑动摩擦力的方向改变,将引起滑块运动状态的转折,这样同一物理环境可能同时出现多个物理过程。
因此这类命题,往往具有相当难度。
滑块与传送带等速的时刻,是相对运动方向及滑动摩擦力方向改变的时刻,也是滑块运动状态转折的临界点。
按滑块与传送带的初始状态,分以下几种情况讨论。
一、滑块初速为0,传送带匀速运动[例1]如图所示,长为L的传送带AB始终保持速度为v0 C的μ的水平向右的速度运动。
今将一与皮带间动摩擦因数为B A t的时间运动到BA端,求C由A 滑块C,轻放到AB所受滑动摩擦力方向向右,在此力作用下C“轻放”的含意指初速为零,滑块解析:C向右做匀加速运动,如果传送带够长,当C与传送带速度相等时,它们之间的滑动摩擦力消失,之后一起匀速运动,如果传送带较短,C可能由A一直加速到B。
滑块C的加速度为,设它能加速到为时向前运动的距离为。
,C由A一直加速到B,由。
若,前进的距用C由若A加速到时离,匀速运动速度距离内以C由A运动到B的时间。
的恒定速度按图示θ的传送带,以如图所示,倾角为[例2] A方向匀速运动。
已知传送带上下两端相距L今将一与传送带间动摩擦因数为μ的滑块A轻放于传送带上端,求A从上端运动到下端θ.0,传送带做匀变速运动二、滑块初速为的恒定速度运动在足够长将一个粉笔头轻放在以2m/s[例3] CB A 若使的划线。
的水平传送带上后,传送带上留下一条长度为4m的初速改做匀减速运动,加速度大小恒为2m/s该传送带仍以2(与传送带的动摩擦因数将另一粉笔头,且在传送带开始做匀减速运动的同时,1.5m/s 和第一个相同)轻放在传送带上,该粉笔头在传送带上能留下一条多长的划线?坐标图上作出两次划线粉笔头及传送带的解析:在同一v-tv 速度图象,如图所示。
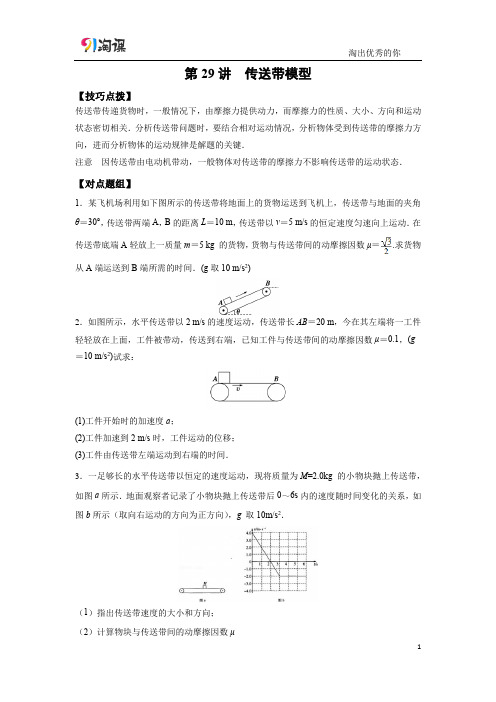
第29讲传送带模型【技巧点拨】传送带传递货物时,一般情况下,由摩擦力提供动力,而摩擦力的性质、大小、方向和运动状态密切相关.分析传送带问题时,要结合相对运动情况,分析物体受到传送带的摩擦力方向,进而分析物体的运动规律是解题的关键.注意因传送带由电动机带动,一般物体对传送带的摩擦力不影响传送带的运动状态.【对点题组】1.某飞机场利用如下图所示的传送带将地面上的货物运送到飞机上,传送带与地面的夹角θ=30°,传送带两端A,B的距离L=10 m,传送带以v=5 m/s的恒定速度匀速向上运动.在传送带底端A轻放上一质量m=5 kg 的货物,货物与传送带间的动摩擦因数μ=.求货物从A端运送到B端所需的时间.(g取10 m/s2)2.如图所示,水平传送带以2 m/s的速度运动,传送带长AB=20 m,今在其左端将一工件轻轻放在上面,工件被带动,传送到右端,已知工件与传送带间的动摩擦因数μ=0.1,(g =10 m/s2)试求:(1)工件开始时的加速度a;(2)工件加速到2 m/s时,工件运动的位移;(3)工件由传送带左端运动到右端的时间.3.一足够长的水平传送带以恒定的速度运动,现将质量为M=2.0kg 的小物块抛上传送带,如图a所示.地面观察者记录了小物块抛上传送带后0~6s内的速度随时间变化的关系,如图b所示(取向右运动的方向为正方向),g取10m/s2.(1)指出传送带速度的大小和方向;(2)计算物块与传送带间的动摩擦因数μ4.将粉笔头A轻放在以4m/s的恒定速度运动的足够长水平传送带上后,传送带上留下一条长度为4m的划线.若使该传送带改做加速度大小为3m/s2的匀减速运动直至速度为零,并且在传送带开始做匀减速运动的同时,将另一粉笔头B轻放在传送带上,求:(1)粉笔头B最终所在位置离划线起点的距离?(2)粉笔在传送带上划线的长度?5.如图所示,传送带与水平面夹角θ=37°,并以v=10m/s的速度运行,在传送带的A端轻轻地放一小物体,若已知传送带与物体之间的动摩擦因数μ=0.5,传送带A到B端的距离s=16m,则小物体从A端运动到B端所需的时间可能是(g=10m/s2) () A.1.8s B.2.0s C.2.1s D.4. 0s6.如图所示,水平传送带AB逆时针匀速转动,一个质量为M=1.0kg的小物块以某一初速度由传送带左端滑上,通过速度传感器记录下物块速度随时间的变化关系如图2所示(图中取向左为正方向,以物块滑上传送带时为计时零点).已知传送带的速度保持不变,g取10m/s2.求:(1)物块与传送带间的动摩擦因数μ;(2)物块在传送带上的运动时间:【高考题组】7.(2014·四川卷)如图所示,水平传送带以速度v1匀速运动,小物体P、Q由通过定滑轮且不可伸长的轻绳相连,t=0时刻P在传送带左端具有速度v2,P与定滑轮间的绳水平,t =t0时刻P离开传送带.不计定滑轮质量和滑轮与绳之间的摩擦,绳足够长.正确描述小物体P速度随时间变化的图像可能是()A B C D8.(2011·福建卷)如图甲所示,绷紧的水平传送带始终以恒定速率v1运行.初速度大小为v2的小物块从与传送带等高的光滑水平地面上的A处滑上传送带.若从小物块滑上传送带开始计时,小物块在传送带上运动的v-t图象(以地面为参考系)如图乙所示.已知v2>v1,则()A. t2时刻,小物块离A处的距离达到最大B. t2时刻,小物块相对传送带滑动的距离达到最大C. 0~t2时间内,小物块受到的摩擦力方向先向右后向左D. 0~t3时间内,小物块始终受到大小不变的摩擦力作用答案精析【对点题组】1.【答案】3 s【解析】以货物为研究对象,由牛顿第二定律得μmg cos 30°-mg sin 30°=ma解得a =2.5 m/s 2货物匀加速运动时间t 1==2 s货物匀加速运动位移x 1=at =5 m然后货物做匀速运动,运动位移x 2=L -x 1=5 m 匀速运动时间t 2==1 s货物从A 到B 所需的时间t =t 1+t 2=3 s2.【答案】(1)1 m/s 2,方向水平向右 (2)2 m (3)11 s【解析】 (1)工件被放在传送带上时初速度为零,相对于传送带向左运动,受滑动摩擦力向右,大小为F f =μmg ,工件加速度a =μg =0.1×10 m/s 2=1 m/s 2,方向水平向右 (2)工件加速到2 m/s 所需时间t 0=v a =21s =2s 在t 0时间内运动的位移x 0=12at =12×1×22 m =2 m (3)由于x 0<20 m ,故工件达到与传送带同样的速度后与传送带相对静止,一起运动至B 端.经过时间t 0后,工件做匀速运动的时间为:t 1=0x x v -=2022- s =9 s 所以工件由传送带左端运动到右端的时间为:t =t 0+t 1=11 s3.【答案】答:(1)传送带速度的大小为2m/s ,方向向左.(2)物块与传送带间的动摩擦因数μ为0.2.【解析】(1)由图可知速度大小为2m/s ,方向向左.(2)由速度图象可得,物块在滑动摩擦力作用下做匀变速运动的加速度为a ,有22m/s v a t∆==-∆. 由牛顿第二定律得,滑动摩擦力﹣f =Ma其中f =μF N =μMg .得到物块与传送带间的动摩擦因数20.210Ma Mg μ===. 4.【答案】(1)粉笔头B 最终所在位置离划线起点的距离为1.39m .(2)粉笔在传送带上划线的长度为1.6m .【解析】设粉笔头与传送带之间的动摩擦因数为μ.第一个粉笔头打滑时间t ,则传送带比粉笔头位移大L =4m ,由运动学可得:4m 2v vt t -= 解得t =2s .则粉笔头的加速度为:224m/s 2m/s 2v a t ===. 根据μmg =ma解得:μ=0.2.第二个粉笔头先加速到与传送带速度相同,设二者达到的相同速度为v ′,传送带减速度的加速度为a 0,由运动学得:0v v v a a''-= 解得:v ′=1.6m/s此过程传送带比粉笔头多走:222022v v v x a a''-∆=-=1.6m . 由于a 0>μg ,故二者不能共同减速,粉笔头以μg 的加速度减速到静止.传送带的加速度大,先停下来.粉笔头减速到零的过程粉笔头比传送带多走:2222v v x a a '''∆=-=0.21m . 可见,粉笔头相对于传送带先后滑1.6m ,后又向前滑0.21m ,粉笔头B 最终所在位置离划线起点的距离△x ″=△x ﹣△x ′=1.39m .最终划线的长度l =△x =1.6m .5.【答案】BD【解析】若传送带顺时针转动,物体受向上的摩擦力,因mgsinθ>μmgcosθ,故物块向下加速运动,a =gs in θ-μg cos θ=2m/s 2。
高中物理传送带模型1.设问的角度(1)动力学角度:首先要正确分析物体的运动过程,做好受力分析,然后利用运动学公式结合牛顿第二定律求物体及传送带在相应时间内的位移,找出物体和传送带之间的位移关系.(2)能量角度:求传送带对物体所做的功、物体和传送带由于相对滑动而产生的热量、因放上物体而使电动机多消耗的电能等,常依据功能关系或能量守恒定律求解.2.功能关系分析(1)传送带克服摩擦力做的功:W=F f x传;(2)系统产生的内能:Q=F f x相对.(3)功能关系分析:W=ΔE k+ΔE p+Q.一、水平传送带:情景图示滑块可能的运动情况情景1⑴可能一直加速⑵可能先加速后匀速情景2 ⑴vv=,一直匀速⑵vv>,一直减速或先减速后匀速⑶vv<,一直加速或先加速后匀速情景3 ⑴传送带较短,一直减速到左端⑵传送带足够长,滑块还要被传回右端:①vv>,返回时速度为v②vv<,返回时速度为v二、倾斜传送带:情景图示滑块可能的运动情况情景1 ⑴可能一直加速⑵可能先加速后匀速⑶可能从左端滑落情景2 ⑴可能一直加速⑵可能先加速后匀速⑶可能先以1a加速,后以2a加速情景3 ⑴可能一直加速⑵可能一直匀速⑶可能先加速后匀速⑷可能先减速后匀速⑸可能先以1a加速,后以2a加速情景4 ⑴可能一直加速⑵可能一直减速⑶可能先减速到0,后反向加速例1(多选)如图所示为某建筑工地所用的水平放置的运输带,在电动机的带动下运输带始终以恒定的速度v0=1 m/s顺时针传动.建筑工人将质量m=2 kg的建筑材料静止地放到运输带的最左端,同时建筑工人以v0=1 m/s的速度向右匀速运动.已知建筑材料与运输带之间的动摩擦因数为μ=0.1,运输带的长度为L=2 m,重力加速度大小为g=10 m/s2.以下说法正确的是()A.建筑工人比建筑材料早到右端0.5 sB.建筑材料在运输带上一直做匀加速直线运动C.因运输建筑材料电动机多消耗的能量为1 JD.运输带对建筑材料做的功为1 J答案AD解析 建筑工人匀速运动到右端,所需时间t 1=Lv 0=2 s ,假设建筑材料先加速再匀速运动,加速时的加速度大小为a =μg =1 m/s 2,加速的时间为t 2=v 0a =1 s ,加速运动的位移为x 1=v 02t 2=0.5 m<L ,假设成立,因此建筑材料先加速运动再匀速运动,匀速运动的时间为t 3=L -x 1v 0=1.5 s ,因此建筑工人比建筑材料早到达右端的时间为Δt =t 3+t 2-t 1=0.5 s ,A 正确,B 错误;建筑材料与运输带在加速阶段摩擦生热,该过程中运输带的位移为x 2=v 0t 2=1 m ,则因摩擦而生成的热量为Q =μmg (x 2-x 1)=1 J ,由动能定理可知,运输带对建筑材料做的功为W =12m v 02=1 J ,则因运输建筑材料电动机多消耗的能量为2 J ,C 错误,D 正确.例2 如图所示,绷紧的传送带与水平面的夹角θ=30°,传送带在电动机的带动下,始终保持v 0=2 m/s 的速率运行,现把一质量为m =10 kg 的工件(可视为质点)轻轻放在传送带的底端,经过时间t =1.9 s ,工件被传送到h =1.5 m 的高处,g 取10 m/s 2,求:(1)工件与传送带间的动摩擦因数; (2)电动机由于传送工件多消耗的电能. 答案 (1)32(2)230 J 解析 (1)由题图可知,传送带长x =hsin θ=3 m 工件速度达到v 0前,做匀加速运动,有x 1=v 02t 1工件速度达到v 0后,做匀速运动, 有x -x 1=v 0(t -t 1)联立解得加速运动的时间t 1=0.8 s 加速运动的位移x 1=0.8 m 所以加速度大小a =v 0t 1=2.5 m/s 2由牛顿第二定律有μmg cos θ-mg sin θ=ma 解得μ=32. (2)由能量守恒定律知,电动机多消耗的电能用于增加工件的动能、势能以及克服传送带与工件之间发生相对位移时摩擦力做功产生的热量. 在时间t 1内,传送带运动的位移 x 传=v 0t 1=1.6 m在时间t 1内,工件相对传送带的位移 x 相=x 传-x 1=0.8 m在时间t 1内,摩擦产生的热量 Q =μmg cos θ·x 相=60 J最终工件获得的动能E k =12m v 02=20 J工件增加的势能E p =mgh =150 J 电动机多消耗的电能 E =Q +E k +E p =230 J.例3如图所示,绷紧的传送带,始终以2 m/s 的速度匀速斜向上运行,传送带与水平方向间的夹角︒=30θ. 现把质量为10 kg 的工件轻轻地放在传送带底端P 处,由传送带传送至顶端Q 处.已知P 、Q 之间的距离为4 m ,工件与传送带间的动摩擦因数23=μ,取2/10s m g = (1)通过计算说明工件在传送带上做什么运动;(2)求工件从P 点运动到Q 点所用的时间.答案:⑴工件先以2/5.2s m 的加速度匀加速运动0.8m ,之后匀速;⑵时间s t t t 4.221=+=例4如图甲所示,绷紧的水平传送带始终以恒定速率v 1运行.初速度大小为v 2的小物块从与传送带等高的光滑水平地面上的A 处滑上传送带.若从小物块滑上传送带开始计时,小物块在传送带上运动的v -t 图象(以地面为参考系)如图乙所示.已知v 2>v 1,则( )A .t 2时刻,小物块离A 处的距离达到最大B .t 2时刻,小物块相对传送带滑动的距离最大C .0~t 2时间内,小物块受到的摩擦力方向先向右后向左D .0~t 3时间内,小物块始终受到大小不变的摩擦力作用 答案:B例5如图所示,水平地面上有一长L =2 m 、质量M =1 kg 的长板,其右端上方有一固定挡板.质量m =2 kg 的小滑块从长板的左端以v 0=6 m/s 的初速度向右运动,同时长板在水平拉力F 作用下以v =2 m/s 的速度向右匀速运动,滑块与挡板相碰后速度为0,长板继续匀速运动,直到长板与滑块分离.已知长板与地面间的动摩擦因数μ1=0.4,滑块与长板间的动摩擦因数μ2=0.5,重力加速度g 取10 m/s 2.求:(1)滑块从长板的左端运动至挡板处的过程,长板的位移x ; (2)滑块碰到挡板前,水平拉力大小F ;(3)滑块从长板的左端运动至与长板分离的过程,系统因摩擦产生的热量Q . 答案 (1)0.8 m (2)2 N (3)48 J 解析 (1)滑块在板上做匀减速运动, a =μ2mg m =μ2g解得:a =5 m/s 2根据运动学公式得:L =v 0t -12at 2解得t =0.4 s (t =2.0 s 舍去)碰到挡板前滑块速度v 1=v 0-at =4 m/s>2 m/s ,说明滑块一直匀减速 板移动的位移x =v t =0.8 m (2)对板受力分析如图所示,有:F +F f2=F f1其中F f1=μ1(M +m )g =12 N ,F f2=μ2mg =10 N 解得:F =2 N(3)法一:滑块与挡板碰撞前,滑块与长板因摩擦产生的热量: Q 1=F f2·(L -x ) =μ2mg (L -x )=12 J滑块与挡板碰撞后,滑块与长板因摩擦产生的热量:Q 2=μ2mg (L -x )=12 J 整个过程中,长板与地面因摩擦产生的热量: Q 3=μ1(M +m )g ·L =24 J 所以,系统因摩擦产生的热量: Q =Q 1+Q 2+Q 3=48 J法二:滑块与挡板碰撞前,木板受到的拉力为F 1=2 N (第二问可知) F 1做功为W 1=F 1x =2×0.8=1.6 J 滑块与挡板碰撞后,木板受到的拉力为:F2=F f1+F f2=μ1(M+m)g+μ2mg=22 NF2做功为W2=F2(L-x)=22×1.2 J=26.4 J 碰到挡板前滑块速度v1=v0-at=4 m/s滑块动能变化:ΔE k=20 J所以系统因摩擦产生的热量:Q=W1+W2+ΔE k=48 J.。
1: 如图所示,绷紧的传送带,始终以2 m/s 的速度匀速斜向上运行,传送带与水平方向间的夹角θ=30°。
现把质量为10 kg 的工件轻轻地放在传送带底端P 处,由传送带传送至顶端Q 处。
已知P 、Q 之间的距离为4 m ,工件与传送带间的动摩擦因数μ=32,取g =10 m/s 2。
(1)通过计算说明工件在传送带上做什么运动;(2)求工件从P 点运动到Q 点所用的时间。
[答案] (1)先匀加速运动0.8 m ,然后匀速运动3.2 m (2)2.4 s解析 (1)工件受重力、摩擦力、支持力共同作用,摩擦力为动力由牛顿第二定律得:μmg cos θ-mg sin θ=ma 代入数值得:a =2.5 m/s 2则其速度达到传送带速度时发生的位移为 x 1=v 22a =222×2.5m =0.8 m<4 m 可见工件先匀加速运动0.8 m ,然后匀速运动3.2 m (2)匀加速时,由x 1=v 2t 1得t 1=0.8 s 匀速上升时t 2=x 2v =3.22s =1.6 s 所以工件从P 点运动到Q 点所用的时间为 t =t 1+t 2=2.4 s 2:如图,倾角为37°,长为l =16 m 的传送带,转动速度为v =10 m/s ,动摩擦因数μ=0.5,在传送带顶端A 处无初速度地释放一个质量为m =0.5 kg的物体.已知sin 37°=0.6,cos 37°=0.8,g =10 m/s 2.求:(1)传送带顺时针转动时,物体从顶端A 滑到底端B 的时间;(2)传送带逆时针转动时,物体从顶端A 滑到底端B 的时间.答案 (1)4 s (2)2 s解析 (1)传送带顺时针转动时,物体相对传送带向下运动,则物体所受滑动摩擦力沿斜面向上,相对传送带向下匀加速运动,根据牛顿第二定律有mg (sin 37°-μcos 37°)=ma 则a =g sin 37°-μg cos 37°=2 m/s 2,根据l =12at 2得t =4 s. (2)传送带逆时针转动,当物体下滑速度小于传送带转动速度时,物体相对传送带向上运动,则物体所受滑动摩擦力沿传送带向下,设物体的加速度大小为a 1,由牛顿第二得,mg sin 37°+μmg cos 37°=ma 1则有a 1=mg sin 37°+μmg cos 37°m=10 m/s 2 设当物体运动速度等于传送带转动速度时经历的时间为t 1,位移为x 1,则有t 1=v a 1=1010 s =1 s ,x 1=12a 1t 21=5 m<l =16 m 当物体运动速度等于传送带速度瞬间,有mg sin 37°>μmg cos 37°,则下一时刻物体相对传送带向下运动,受到传送带向上的滑动摩擦力——摩擦力发生突变.设当物体下滑速度大于传送带转动速度时物体的加速度为a 2,则a 2=mg sin 37°-μmg cos 37°m=2 m/s 2 x 2=l -x 1=11 m 又因为x 2=vt 2+12a 2t 22,则有10t 2+t 22=11,解得:t 2=1 s(t 2=-11 s 舍去)所以t 总=t 1+t 2=2 s. 3.如图所示,足够长的传送带与水平面倾角θ=37°,以12m/s 的速率逆时针转动。
传送带效率问题的数学模型一.摘要:传送带在现实生活中有许多应用之处,例如:大型机床场的产品运输带.港口的货物运输机。
因此,对传送带的效率问题进行数学建模也就有所必要了。
依照本人目前数学水平可将该问题简化为:在机械化生产车间里,排列整齐的工作台旁工人们紧张的生产同一种产品,工作台上放一条传送带在运转,带上设置若干钩子,工人将产品挂在经过他上方的钩子上带走。
当生产进入稳定状态后,每个工人生产一件产品所需时间是不变的,而他挂产品的时刻是随机的。
衡量这种传送系统的效率可以看他能否及时把工人的产品带走。
明显,在工人数目不变的情况下传送带速度越快,带上钩子数越多,效率越高。
以此假设为基础可通过初等数学概率的方法来解决,可将传送带效率定义为一周期内带走的产品数与生产的全部产品数之比,则经计算和化简后可得:(其中,D 为效率,n 为工人数,m 为挂钩数)以下为详细建模过程。
二.问题重述:构造衡量传送系统效率的指标,并在简化假设下建立模型描述这个指标与工人数目、钩子数量等参数的关系。
三.模型假设与符号说明:()mn m n n m n n m D 21121112--=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+--≈1.有n 个工人,其生产是独立的,生产周期是常数, 有n 个工作台均匀排列。
2.生产已进入稳态,即每个工人生产出一件产品的时刻在一个周期内是等可能性的。
3.在一周期内有 m 个钩子通过每一工作台上方,钩子均匀排列,到达第一个工作台上方的钩子都是空的。
4.每个工人在任何时刻都能触到一只钩子,且之能触到一只,在他生产出一件产品的瞬间,如果他能触到的钩子是空的,则可将产品挂上带走;如果非空,则他只能将产品放下。
放下的产品就永远退出这个传送系统。
四.模型建立及求解:将传送系统效率定义为一周期内带走的产品数与生产的全部产品数之比,记作 D ,设带走的产品数为 s ,生产的全部产品数为 n ,则 。
需求出 s 。
如果从工人的角度考虑,分析每个工人能将自己的产品挂上钩子的概率,这与工人所在的位置有关(如第1个工人一定可挂上),这样使问题复杂化。
传送带效率问题的数学模型
一.摘要:
传送带在现实生活中有许多应用之处,例如:大型机床场的产品运输带.港口的货物运输机。
因此,对传送带的效率问题进行数学建模也就有所必要了。
依照本人目前数学水平可将该问题简化为:在机械化生产车间里,排列整齐的工作台旁工人们紧张的生产同一种产品,工作台上放一条传送带在运转,带上设置若干钩子,工人将产品挂在经过他上方的钩子上带走。
当生产进入稳定状态后,每个工人生产一件产品所需时间是不变的,而他挂产品的时刻是随机的。
衡量这种传送系统的效率可以看他能否及时把工人的产品带走。
明显,在工人数目不变的情况下传送带速度越快,带上钩子数越多,效率越高。
以此假设为基础可通过初等数学概率的方法来解决,可将传送带效率定义为一周期内带走的产品数与生产的全部产品数之比,则经
计算和化简后可得:
(其中,D 为效率,n 为工人数,m 为挂钩数)
以下为详细建模过程。
二.问题重述:
构造衡量传送系统效率的指标,并在简化假设下建立模型描述这个指标与工人数目、钩子数量等参数的关系。
三.模型假设与符号说明:
()m
n m n n m n n m D 21121112--=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+--≈
1.有n 个工人,其生产是独立的,生产周期是常数, 有n 个工作台均匀排列。
2.生产已进入稳态,即每个工人生产出一件产品的时刻在一个周期内是等可能性的。
3.在一周期内有 m 个钩子通过每一工作台上方,钩子均匀排列,到达第一个工作台上方的钩子都是空的。
4.每个工人在任何时刻都能触到一只钩子,且之能触到一只,在他生产出一件产品的瞬间,如果他能触到的钩子是空的,则可将产品挂上带走;如果非空,则他只能将产品放下。
放下的产品就永远退出这个传送系统。
四.模型建立及求解:
将传送系统效率定义为一周期内带走的产品数与生产的全部产品数之比,记作 D ,设带走的产品数为 s ,生产的全部产品数为 n ,则 。
需求出 s 。
如果从工人的角度考虑,分析每个工人能将自己的产品挂上钩子的概率,这与工人所在的位置有关(如第1个工人一定可挂上),这样使问题复杂化。
我们从钩子角度考虑,在稳定状态下钩子没有次序,处于同等地位。
若能对一周期内的 m 只钩子求出每只钩子非空的概率 p ,则 。
得到 p 的步骤如下:(均对一周期而言)
任一只钩子被一名工人触到的概率是 ;
任一只钩子不被一名工人触到的概率是 ; n s D
/=mp s =m /1m /1
1-
由工人生产的独立性,任一只钩子不被所有 n 个工人挂上
产品的概率,即任一只钩子为空钩的概率是 ; 任一只钩子非空的概率是
传送系统的效率指标为
为了得到比较简单的结果,在钩子数 m 相对于工人数 n 较大,
即 较小的情况下,将多项式 展开后只取前3项,则
有
如果将一周期内未带走的产品数与全部产品数之比记作E , 再假定 ,则
可进行精确度检验:
当 时,上式给出的结果为 而精确表达式计算得 五.模型优化及改进:
问题:如何改进模型使“效率E ”(可理解为相反意义的效率)降低?
解决方案:通过增加钩子数来使效率降低的方法。
n
m ⎪⎭⎫ ⎝⎛-11n m p ⎪⎭⎫ ⎝⎛--=111⎥⎥⎦
⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛--==n m n m n mp D 111m n n
m ⎪⎭
⎫ ⎝⎛-11()m n m n n m n n m D 21121112--=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+--≈1>>n m n E E D 2,1≈-=400,100==m n %5.87=D %
4.89=D
在原来放置一只钩子处放置两只钩子成为一个钩对。
一周期内通
过m 个钩对,任一钩对被任意工人触到的概率 ,不被触
到的概率是 ,于是任一钩对为空的概率是 ,钩对上只挂一件产品的概率是 ,一周期内通过的2m 个钩子中,空钩的平均数是 带走产品的平均数是 未带走产品的平均数是
按照上一模型的定义,有 利用 和 的近似展开,可得 注意: 展开取4项, 展开取3项。
而上一模 型中的方法有 有 当 时, ,所以该模型提供的方法比上一个模型好。
六.模型评价及推广:
这个模型是在理想情况下得到的,其中一些假设,如生产周期不m p /1=p q -=1n q
1-n npq ()12-+n n npq q
m
()122-+-n n npq q m m ()[]122-+--n n npq q m m n ⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛--⎪⎭⎫ ⎝⎛---=-=-111112211n n m m n m n m D E n m ⎪⎭⎫ ⎝⎛-11111-⎪⎭
⎫ ⎝⎛-n m ()()2
2
26621m n m n n E ≈--≈n m ⎪⎭⎫ ⎝⎛-111
11-⎪⎭⎫ ⎝⎛-n m m
n E 41=1E E β=m n 32=β32n m >1<β
变,挂不上钩子的产品退出系统等是不现实的,但模型的意义在于,一方面利用基本合理的假设将问题简化到能够建模的程度,并用简单的方法得到结果;另一方面所得到的简化结果具有非常简单的意义。
七.参考文献:
作者:冯杰.黄力伟.王勤.尹成义
书名:《数学建模原理及案例》
出版社:科学出版社
出版日期:2007.1。