数控机床装调维修教案
- 格式:docx
- 大小:81.33 KB
- 文档页数:8


数控机床装调维修教案数控机床是一种广泛应用于机械加工领域的高级设备,它具有高精度、高效率、高自动化程度等特点。
为了保证数控机床的正常运行和良好使用效果,装调维修工作显得尤为重要。
下面将为大家介绍一种数控机床装调维修教案。
一、教学目标:1.掌握数控机床的基本构造和工作原理。
2.学会数控机床的安装、调试和维修方法。
3.熟悉数控机床操作规程和安全注意事项。
二、教学内容:1.数控机床的基本构造:-主要部件:床身、主轴箱、进给箱、液压传动装置、电器控制系统等。
-工作原理:数控机床通过主轴和进给装置的联动控制实现工件的加工。
-运动方式:数控机床可以实现直线运动、圆弧运动和曲线运动等。
2.数控机床的安装:-安装位置:数控机床要安装在平整稳固的基础上,远离震源和强磁场。
-安装调平:使用水平仪对数控机床进行水平调整,确保各轴的平行度和垂直度符合要求。
-安装附件:安装机床的配套装置,如冷却系统、刀库、卡具等。
3.数控机床的调试:-连接电源:将数控机床与电源连接,并检查电源线路的接线是否正确。
-系统启动:按照数控机床的启动顺序,逐一打开电源、操作台和控制柜,并进行系统自检和故障排除。
-参数设置:根据加工要求,设置数控机床的相关参数,如进给速度、切削速度等。
-运动校准:使用专用工具对数控机床的各轴进行一次性的机械校正,确保运动精度。
4.数控机床的维修:-故障排除:根据故障现象和报警信息,确定故障原因,并采取相应的维修措施。
-零部件更换:对于损坏或失效的零部件,可以根据维修手册和设备文档进行更换。
-润滑保养:定期对数控机床的润滑系统进行检查和维护,并根据要求添加润滑油。
-定期保养:定期对数控机床进行全面检查和保养,确保各部件的正常工作。
三、教学方法:1.理论授课:介绍数控机床的基本知识和装调维修方法,讲解相关原理和操作技巧。
2.实践操作:组织学生进行数控机床的实际操作,熟练掌握安装、调试和维修技能。
3.案例演练:结合实际案例,让学生分析和解决数控机床的故障问题,提高应变能力。
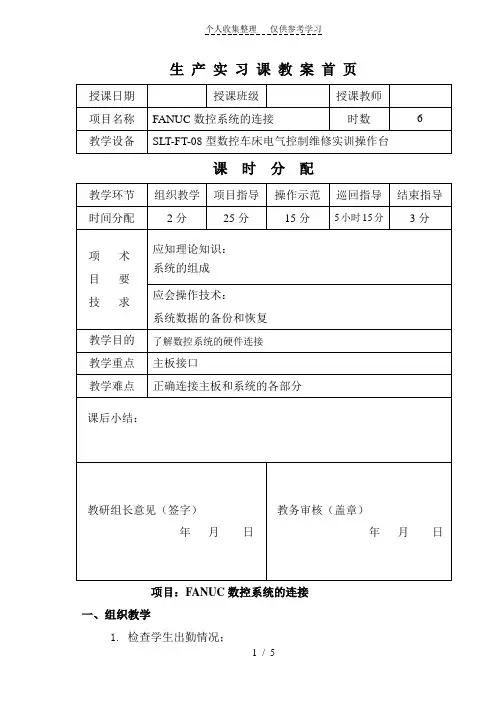
生产实习课教案首页课时分配项目:FANUC数控系统的连接一、组织教学1. 检查学生出勤情况;2. 检查学生劳动防护用品的穿戴情况及实习工具的准备情况;3.宣布上课。
二、项目指导1.复习旧课为什么要对机床数据进行备份和保存?因为数据的唯一性和易失性。
2.项目引入通用型FANUC数控系统(OPEN CNC除外),其CNC系统平台及软件完全由FANUC公司开发,没有Windows界面,硬件采用F-BUS(FANUC总线)。
整个数控系统由CNC、伺服及主轴驱动、PMC(programmable machine control)及I/O电路组成和外围开关组成。
3.相关知识主控制系统⑴系统原理与构成CNC主控制系统就是数控机床的大脑和中枢●它含有CPU——中央处理器,负责整个系统的运算,中断控制等。
外观参见图1-7。
●存储器由F-ROM、S-RAM、D-RAM组成,其中:F-ROM(Flash read only memory 快速可改写只读存储器)存放着FANUC公司的系统软件,它们包括;①插补控制软件②数字伺服软件③ PMC控制软件④ PMC应用程序(梯形图)⑤网络通讯软件(以太网及RS232C、DNC等)控制软件⑥图形显示软件等。
S-RAM(Static random access memory 静态随机存储器)存放着机床厂及用户数据;①系统参数(包括数字伺服参数)②加工程序③用户宏程序及宏变量④ PMC参数⑤刀具补偿及工件坐标补偿数据⑥螺距误差补偿数据D-RAM(Dynamic random access memory 动态随机存储器)——作为工作存储器,在控制系统中起缓存作用。
数字伺服轴控制卡——目前数控技术广泛采用全数字伺服交流同步电机控制。
全数字伺服的运算以及脉宽调制已经以软件的形式打包装入CNC系统内(写入F-ROM中),支撑伺服软件运算的硬件环境由DSP (Digital Signal Process 数字信号处理器)以及周边电路组成,这就是所谓的“轴控制卡”。
数控机床维修与保养一体化教学教案教师:学生分析:本次课程名称为《数控机床维修与保养》,授课的班级为16级数控3+2班。
这个班级在学校已经学习过了《数控车一体化教学》,基本掌握了华中数控车系统和数控车床的基本操作和加工。
为了使学生能更适应外面企业的要求,还需要学习数控系统的基本原理及简单故障的判断,为使学生更容易掌握本数控系统的基本原理,我们采取了理实一体化教学的模式,利用数控维修实训室,运用多媒体教学、现场实验、动手实践等多种教学手段增加教学的趣味性,激发学生自主学习的兴趣。
希望通过6周的教学,让学生掌握其他数控系统的原理、数控系统的连接、数控系统的调试等方面进行系统的学习,掌握其他数控系统的知识,为学生的就业打下坚实的基础。
素质和安全教育教学目标:1.使学生了解本门课程的内容与要求2.使学生做好实习各方面的准备3. 对学生进行职业素养与安全意识的培训,确保安全完成本课程教学。
技能目标:1. 使学生了解本专业必备的职业素养要求2. 让学生安全意识贯穿于整个教学实习期间教学重点、难点:重点:素质与安规培训难点:素质与安规意识的培养教学课时数:2教具:课本、PPT、多媒体教学设备教学内容、过程、方法:讲授:1 考试:1教学内容:1.课程介绍2.布置实习内容及要求,讲解实习实训形式及考核标准3.进行职业素养及安全意识培训教学过程:引入新课:(1)向同学们介绍自己(2)熟悉学生名字,与学生进行沟通,建立感情实习动员:(2)介绍本课程学习内容及学习要求(3)介绍本课程的学习形式及考核方法素养与安规教育:(4)讲解职业素养与安全生产的重要性(5)播放素质与安规教育的PPT( 6) 进行安规试题测试任务1-1 认识数控机床的组成部件教学目的:1.使学生了解数控机床的组成2.使学生了解数控机床的工作原理过程教学重点、难点:重点:数控机床的组成部件及其功能难点:数控机床的工作原理过程教学课时数:4教具:课本、实验台教学内容、过程、方法:讲授:3 练习:1教学内容:1.数控机床的概念2.数控机床的组成3.数控机床的工作原理过程教学过程:引入新课:(1)向同学们介绍自己(2)介绍本课程学习内容及考核方法本课内容及达到目的:1.一个合格的机床操作人员应是应能对机床的一些简单的故障进行维修,故应很好的了解机床的结构,及其组成部分的工作原理等。
《数控机床安装调试及维修》教案目录教案1--------概述教案2--------数控机床的安装调试教案3--------数控机床的验收教案4--------数控机床的调整、主轴部件教案5--------进给传动部件的调整教案6--------回转部件、自动换刀装置的调整教案7--------位置检测装置、床身导轨的调整教案8--------数控系统发展简介、FANUC-0ib功能介绍教案9--------FANUC-0ib系统构成、硬件连接教案10------系统参数及设定教案11------I/O接口及PMC编程教案12------ SINU MERIC 840C特点介绍主要功能教案13----- SINUMERIC 840C系统的结构及各部分的功能教案14------ fanuc-0ib系统报警分类及常见故障分析教案15-----FANUC-0ib常见报警及处理方法教案16----数控机床的故障诊断及维修技术概述教案17----利用PLC进行数控机床的故障检测教案18-----数控系统系统故障的诊断教案19-----伺服系统的故障及维修技术教案20-----检测装置的故障及诊断教师教案教案专用纸第一章概述1.数控机床的优点:数控机床集机械制造、计算机、气动、传感检测、液压、光机电技术等一体,其优点:⑴能够进行复杂型面零件的加工,解决工艺难题。
⑵提高生产率⑶具有柔性⑷减轻工人的劳动强度2.我国数控机床的发展现状起步年代:1958开始研制目前生产能力:2001年国内数控机床产量已达1.8万台国产数控系统:⑴华中理工大学华中一型、华中二型⑵北京航天机床数控集团航天一型⑶中科院沈阳计算机所蓝天一型⑷中国珠峰数控公司中华一型3.加强数控维修的意义⑴技术需要⑵市场需要⑶企业的效益需要4.对数控维修人员的要求⑴知识面广⑵良好的系统的培训⑶良好的英语阅读能力⑷敢于实践,通过实践不断总结经验⑸敬业精神⑹持续的学习精神5.本课程的学习任务、要求⑴掌握数控机床安装调试验收的的知识、验收机床精度的方法。
《数控机床自动化系统装调与维修一体化教程》教案模块一数控机床自动化系统装调与维修一体化教程教案模块一本教案模块旨在介绍数控机床自动化系统的装调与维修,并为学生提供相关的基础知识和操作技能。
一、教学目标1. 理解数控机床自动化系统的基本原理和组成结构;2. 掌握数控机床自动化系统的装调方法和流程;3. 熟悉数控机床自动化系统的常见故障及维修方法;4. 培养学生的操作技能和故障排除能力。
二、教学内容1. 数控机床自动化系统的基本原理:- 数控机床的定义和分类;- 数控机床的结构和工作原理;- 数控系统的组成和功能。
2. 数控机床自动化系统的装调方法和流程:- 数控机床的装配和调试流程;- 数控系统的参数设置和校准;- 数控编程和工件加工示范。
3. 数控机床自动化系统的故障与维修:- 常见故障的诊断和排除方法;- 数控机床部件的更换和维修;- 故障案例分析和解决方案。
三、教学方法1. 理论授课:通过讲解和演示,介绍数控机床自动化系统的原理和装调方法;2. 操作实践:组织学生进行实际操作,掌握数控编程和工件加工的基本技能;3. 案例分析:分析数控机床自动化系统的故障案例,培养学生的故障排除能力;4. 小组讨论:组织学生进行小组讨论,探讨解决数控机床自动化系统故障的有效方法。
四、教学评估1. 知识测试:通过问答和笔试形式,测试学生对数控机床自动化系统的理解程度;2. 操作考核:对学生进行数控编程和工件加工操作的考核;3. 综合评价:综合考虑学生的理论知识掌握情况、操作技能和故障排除能力进行评价。
五、教学资源1. 数控机床自动化系统装调与维修教材;2. 数控机床模拟实训设备;3. 数控编程和工件加工实例。
六、教学安排本教案模块的教学安排如下:七、教学亮点1. 组合教学法:将理论与实践相结合,提高学生的研究效果;2. 故障案例分析:通过具体案例分析,加深学生对故障排除的理解;3. 小组讨论:培养学生的合作意识和解决问题的能力。
生产实习课教案首页课时分配项目:FANUC 数控系统的数据备份与恢复一、组织教学1. 检查学生出勤情况;2. 检查学生劳动防护用品的穿戴情况及实习工具的准备情况;3. 宣布上课。
二、项目指导1.复习旧课数控机床的故障诊断方法1. 系统报警号及系统诊断号故障诊断方法2. 动态梯形图诊断法3. 初始化复位法4. 备件置换法5. 同类对调法6. 功能参数的封锁法7. 使能信号的短接法8. 系统故障诊断引导法9. 远程诊断法2.项目引入在F-ROM中的数据相对稳定,一般情况下不易丢失,但是如果遇到更换主板或存储器板时,在F-ROM中的数据可能丢失,其中FANUC的系统文件在购买备份或修复时可由FANUC公司恢复,但是机床厂文件—PMC程序及用户宏程序执行器丢失后很难恢复,因此备份机床厂数据也是必要的。
3.相关知识(1)数据的分区FANUCi系列数控系统与其他数控系统一样,通过不同的存储空间存放不同的数据文件。
数据存储空间主要分为:①ROM—FLASH-ROM,只读存储器,在数控系统中作为系统存储空间,用于存储系统文件和机床厂(MTB)文件。
②SRAM—静态随机存储器,在数控系统中用于存储用户数据,断电后需要电池保护,所以有易失性(如电池电压过低、S-RAM损坏等).(2)数据的分类数据文件主要分为系统文件、MTB(机床制造厂)文件和用户文件。
①系统文件—FANUC提供的CNC和伺服控制软件。
②MTB文件—PMC程序、机床厂编辑的宏程序执行器(Manual Guide及CAP程序等)。
③用户文件—系统参数、螺距误差补偿值、加工程序、宏程序、刀具补偿值、工件坐标系数据、PMC参数等。
(3)数据的备份和保存在SRAM中的数据由于断电后需要电池保护,有易失性,所以保留数据非常必要,此类数据需要通过“引导画面BACKUP(备份)”方式或“数据输入/输出”方式保存。
通过“引导画面备份”保留的数据无法用写字板或WORD软件打开,即无法用文本格式阅读数据,但是通过“输入输出”方式得到的数据可以通过写字板或WORD软件打开。
生产实习课教案首页课时分配项目:FANUC系统增量方式建立参考点一、组织教学1. 检查学生出勤情况;2. 检查学生劳动防护用品的穿戴情况及实习工具的准备情况;3.宣布上课。
二、项目指导1.复习旧课光缆在整个系统中起到什么作用?FSSB(FANUC Serial Servo Bus)是一个连接CNC与伺服放大器的高速串行总线,它上面串联着三个主要的功能部件①CNC ②伺服放大器③光栅适配器,并承接者它们之间的数据双向传输,包括移动指令、半闭环反馈或全闭环反馈信息,报警、准备信息等。
2.项目引入数控机床在首次开机后、按下急停开关后和机床出现故障修复后都要进行手动返回参考点,其目的是为了建立准确的机床坐标系,在准确的机床坐标系下才能加工出合格的零件,在连续重复的加工以后也要通过返回参考点消除进给运动部件的坐标累积误差。
3.相关知识I.增量方式建立参考点的定义增量方式建立参考点就是增量方式回零,采用增量式编码器,工作台快速接近减速开关,经减速开关减速后低速寻找机床零点。
★II.根据机床建立参考点的动作过程,分成三部分来学习增量方式建立参考点的参数设定。
(1) 工作台快速接近减速开关①运动方向的设定111 电机顺时针旋转(工作台正向移动)从编码器的一侧看电机,顺时针旋转设为111,逆时针旋转设为-111电机的旋转方向设定的不正确会使工作台向反方向运动,出现超程报警。
②运动速度的设定数据范围:2000-25000毫米/分钟运动速度过快:影响机床的加工精度和缩短电机的使用寿命运动速度过慢:降低生产效率(2)工作台压下减速开关①运动方向的设定②运动速度的设定数据范围:200-500毫米/分钟运动速度过快:影响机床的加工精度和缩短电机的使用寿命。
运动速度过慢:降低生产效率。
③压下减速开关X9.0~X9.2触发X9.0对应X轴的回零减速地址;X9.1对应Y轴的回零减速地址;X9.2对应Z轴的回零减速地址,以上三个地址是FANUC系统常用的减速地址。
生产实习课教案首页课时分配项目:FANUC数控车床维修实训台应用一、组织教学1. 检查学生出勤情况;2. 检查学生劳动防护用品的穿戴情况及实习工具的准备情况;3. 宣布上课。
二、项目指导1.项目引入数控车床是数控机床中,最常用的一类加工机床。
为了能够使得学生熟悉和掌握数控机床的组成和功能,在实训教学中,采用了维修实训台作为实训设备。
这样可以最大程度的使得实训更加的贴近实际。
2.相关知识1)数控车床维修实训台的组件布置操作板上装有主轴及进给伺服驱动单元、输入/输出接口板、稳压电源、I/O-LINK模块,以及及配电盘等。
实训台下方装有变压器,主轴伺服电机及海德汉编码器。
Oi-MA TE-TD CNC数控系统与LCD显示器位一体式结构安装在操作台上方,MDI操作单元安装在其右侧。
标准操作面板和子面板B安装在其下方。
2)FANUC 0i-mate-TD 系统数控车床维修实训台的基本组成:CNC装置、PMC(内置PLC)、机床I/O单元、伺服放大器、伺服电动机、主轴变频器、主轴电动机、检测反馈装置、机床电气控制系统、CNC车床操作装置、车床电动刀架、实训台指示灯。
3)数控车床维修实训台组成部件的功能作用:CNC装置数控装置是数控机床的核心。
它由输入装置、存储器、控制器、运算器和输出装置组成。
它的功能是接收输入装置输入的加工信息,经过数控装置的系统软件对代码进行处理后,输出相应的指令脉冲。
这些控制信号中最基本的信号,是经过插补运算后的各坐标(即作进给运动的各执行部件)的进给速度、进给方向和位移量指令。
从自动控制的角度来看,CNC 装置是一种位置(轨迹)控制系统,其本质上是以机床各运动轴的位移量为控制对象,并使其协调运动的自动控制系统,是一种配有专用操作系统的计算机控制系统。
PMC(内置PLC)通过PMC程序控制NC与机床接口的输入输出信号,完成机床辅助运动的控制。
如接收来自操作面板、机床上的各行程开关、传感器、按钮、强电柜里的继电器以及主轴控制、刀库控制的有关信号,经处理后输出去控制相应器件的运行。
生产实习课教案首页课时分配项目:FANUC系统伺服驱动单元的调试和故障诊断一、组织教学1. 检查学生出勤情况;2. 检查学生劳动防护用品的穿戴情况及实习工具的准备情况;3. 宣布上课。
二、项目指导1.复习旧课请说明系统报警P/S000和P/S001的含义?P/S报警100(允许参数写入)P/S报警000(需切断电源)2.项目引入作为现场数控维修人员,今后涉及硬件的工作量会越来越少,而软件工作量会越来越多,这是由于CPU运算速度成几何倍数提高,过去必须靠硬件实现的工作,现在依托高速处理器用软件的形式取而代之。
那么在今后的系统以及数字伺服维修过程中,熟知各类重要参数的调整,特别是熟悉理解重要伺服参数的含义并能够进行优化、调整,对于我们今后的日常维修调试中愈发显得重要。
3.相关知识1、有关伺服参数的含义参数1010:CNC控制轴数。
参数1020:各轴的编程名称参数1022:基本座标系中各轴的顺序参数1023:各轴的伺服轴号。
参数1825:各轴的伺服环增益。
参数1826:各轴的到位宽度。
参数1827:设定各轴切削进给的到位宽度。
参数1828:各轴移动中的最大允许位置偏差量。
参数1829:各轴停止中的最大允许位置偏差量。
2、诊断画面的显示(1)按SYSTEM键。
(2)按[诊断]软键、显示诊断画面。
3、伺服相关诊断号的含义诊断号200:OVL:发生过载报警。
(详细内容显示在诊断号201上)。
LV:伺服放大器电压不足的报警。
OVC:在数字伺服内部,检查出过流报警。
HCA:检测出伺服放大器电流异常报警。
HVA:检测出伺服放大器过电压报警。
DCA:伺服放大器再生放电电路报警。
FBA:发生了断线报警。
OFA:数字伺服内部发生了溢出报警。
诊断号201:当诊断号200的OVL为1时ALD:1:电机过热。
0:伺服放大器过热。
当诊断号200的FBA为1时诊断号203:PRM:数字伺服侧检测到报警,参数设定值不正确。
诊断号204:OFS:数字伺服电流值的A/D转换异常。
生产实习课教案首页
课时分配
项目:伺服参数的设定
、组织教学
1. 检查学生出勤情况;
2. 检查学生劳动防护用品的穿戴情况及实习工具的准备情况;
3. 宣布上课。
二、项目指导
1. 复习旧课(提问)
说出下列各参数的作用?
1020
1828
1829
2. 项目引入
在FANUC 0i 系列中,伺服参数是最重要的,也是维修、调试中干预最多的参数
3. 相关知识
设定电机ID 号
F-ROM中写有很多种电机数据,如何从中选择一组适合电机数据写到
S-RAM 中呢?正确选择各轴所使用的电机代码(MOTORID NO.——Identification 即电机“身份识别”号),就可以从F-ROM中读
取相匹配的数组。
具体方法为;按照电机型号和规格号(中间4位:A06B-XXXX-BXXX
从电机规格表中选择相应的电机代码(参见下表)
丫轴
00001010
197*
2
1
1 -111
8 192
10000 f0000
.JOG 寧半屮申 ** * t * + I 1 0 : 50 : -1 9
电机ID 号对应表参见下面的表格。
对于本手册中没有叙
述到的电机
型号,请参照ai 系列伺服放大器说明书
对于ai 和Bi 系列伺服电机对照下列表,不带括号的电机类型是对 于HRV1的,带括号的电机类型是对 HRV2和HRV3勺。
电机型号 B 2/4000is
B 4/4000is
B 8/3000is
B 12/3000is
B 22/2000is
电机规格 0061(20A) 0063(20A) 0075(20A) 0078(40A) 0085(40A) 电机代码 153(253)
156(256)
158(258)
172(272)
174(274)
电机型号 a c4/3000i
a c8/2000i
a c12/2000i
a c22/2000i
a c30/1500i
电机规格 0221 0226 0241 0246 0251 电机代码 171(271)
176(276)
191(291)
196(296)
201(301)
电机型号 a 1/5000i
a 2/5000i
a 4/3000i
a 8/3000i
a 12/3000i
电机规格 0202 0205 0223 0227 0243 电机代码 152(252)
155(255)
173(273)
177(277)
193(293)
电机型号 a 22/3000i
a 30/3000i
a 40/3000i
a 40/3000i
FAN
电机规格 0247 0253 0257 0258-B_1_
电机规格 197(297)
203(303)
207(307)
208(308)
电机型号 a 4/5000is
a 8/4000is
a 12/4000is
a 22/4000is
a 30/4000is
电机规格 0215 0235 0238 0265 0268 电机代码
165(265)
185(285)
188(288)
215(315)
218(318)
电机型号
a 40/4000is a 50/3000is a 50/3000is a 100/2500is a 200/2500is
数数量
冲冲容 脉脉器 定
馈馈数 设反
反计
向苦
方速位
参
电机ID 号
x 轴
CMR (指令倍乘比)指令倍乘比的含义;
f^MI82O
伺服位置控制是指令与反馈不断比较运算的结果,但是实际移动距离是电机轴与滚珠丝杠综合运动的结果,那么指令10mm电机转多少圈才能够让工作台移动10mm呢?这里取决于丝杠螺距和电机反馈脉冲数等关键参数,假如滚珠丝杠螺距为10mm那么电机旋转一圈工作台移动10mm 又怎样在CNC指令10mm后,电机正好旋转一圈,并且反馈的脉冲数正好与指令脉冲数吻合,
FANUC伺服的解决方案就是引入一个当量概念
――“指令当量=反馈当量”也就说发出的脉冲数应和反馈的脉冲数相匹配。
CM(指令倍乘比)与DM(N/M)就是“调整” “指令当量”和“反馈当量”的参数,通俗的讲它是一个“凑数”的过程,就是想方设法使指令与反馈脉冲数建立一个合理的关系。
注意:
最小指令增量、检测单位、
CMR 和DMR 之间的关系如下:
最小指令增量 =CMR X 检测单位
电机每转移动量
指令被乘比设定原则如下;
PRM 1820 ---------------
通常,指令单
位
二检测单位(CMR=),因此参数1820#,指令倍乘比设为2 关断电源,然后再打开电源。
下面进一步完善设定数据
检测倍率(DMR 也称进给齿轮比 N/M (F.FG )的设置
PRM 2084 PRM 2085
设定半闭环 a 脉冲编码器
柔性进给齿轮的 N
柔性进给齿轮的 M
指令倍乘比
对分子和分母,最大设定值(约分后)是32767。
对柔性齿轮比,a i脉冲编码器电机每转有1000000个脉冲。
如果计算电机转数时使用了n值,比如使用齿轮和齿条,假定n值近似为
355/113
实际简化后公式为:
N = 电机每转1转所需的位置脉冲数的最小公约数
这里有一个关键词“电机每转1转所需的位置反馈脉冲”,物理含义是:电机旋转一转,工作台移动的距离换算成位置脉冲数,而距离与位置脉冲数的关系取决于伺服轴的基本参数1004#最小输入单位的指定,通常该值为0.001mm并代表1个脉冲数,假如电机转一转工作台移动10mm最小指令单位是0.001mm相当于电机转一转产生10000个脉冲数。
参考下图:
<-—10mm/0.001mm =10000 (个脉
移动方向
PRM 2022
---------------- 电机回转方向 ------
+ 111正向,-111负向
速度脉冲数,位置脉冲数
串行a i 脉冲编码器或串行a 脉冲编码器时:
参数号
设定单位1/1000mm
设定单位1/10000mm
闭环
半闭环
闭环 半闭环
高分辨率设定
2000 xxxxxxx0
XXXXXXX1 分离型检测器
1815 00100010
00100000
00100010
00100000
速度反馈脉冲
2023 4X2048=8192 819
位置反馈脉冲
2024
NS
12500
NS/10
1250
NS 为电机一转的位置反馈脉冲数(4倍后)。
全闭环时,还需设定PRM 200蓉3= 1,# 4= 0
参考计数器的设定主要用于栅格方式回原点,根据参考计数器的容 量,每隔该容量脉冲数溢出产生一个栅格脉冲,栅格(电气栅格)脉冲 与光电编码器中一转信号(物理栅格)通过 1850#参数偏移后,作为回 零的基准栅格。
参见下图所示
PRM 1821
1 JWLTL
—参考计数
PCZ
参考计数器容量设定值是指电机转一转所需的(位置反馈)脉冲数, 或者设定为该数能够被整数除尽的分数。
也可以理解为返回参考点的栅格间隔 所以,参考计数器容量 二 栅格间隔/检测单位 栅格间隔=脉冲编码器1转的移动量
参考计数器容量
PRM 1821
各轴的参考计数器容量
反馈
溢出脉冲作
PRM 2084/2085
N/M
PCB PCZ
《设定举例》
需要注意的是,由于“零点基准脉冲”是由栅格指定的,而栅格又是由参考计数器容量决定的,当参考计数器容量设定错误后,会导致每次回零的位置不一致,也即回零点不准。
三、示范操作
1、参数备份
2、通过参数3208#1SKY置1打开【system]
3、将3111# b0=1使系统显示伺服画面
4、找到伺服设定画面
实训内容:伺服参数设定
四、巡回指导
1. 检查学生是否遵守安全文明生产规程。
2. 检查学生的实习情况,及时更正指导。
3. 检查学生的故障排除情况。
4. 对学生在实习中出现的有共性问题进行集中辅导五、结束指导
1. 老师对本节课的实习情况进行点评
2. 课后思考题柔性齿轮比的计算方法?。