LG_PLC位置控制指令用法1
- 格式:doc
- 大小:274.00 KB
- 文档页数:4

信捷人机界面和LG Master-K 系列PLC 通讯说明 信捷人机界面与LG-PLC 通讯有两种方式,在硬件接线和软件配置方面都很大区别,必须格外注意!!!
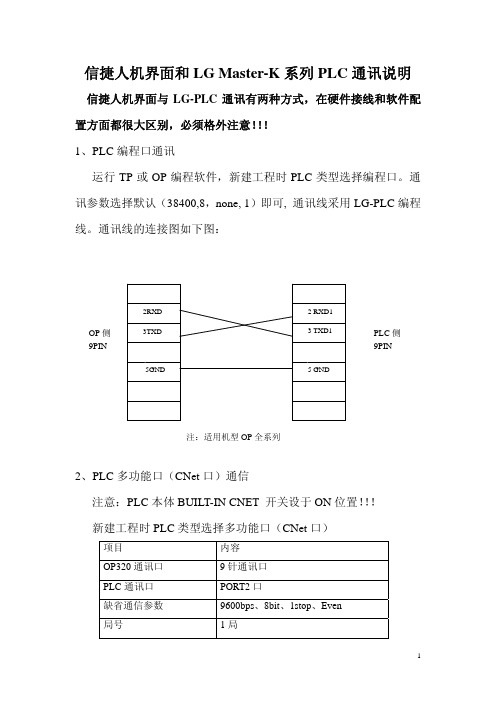
1、PLC 编程口通讯
运行TP 或OP 编程软件,新建工程时PLC 类型选择编程口。
通讯参数选择默认(38400,8,none, 1)即可, 通讯线采用LG-PLC 编程线。
通讯线的连接图如下图:
2、PLC 多功能口(CNet 口)通信
注意:PLC 本体BUILT-IN CNET 开关设于ON 位置!!!
新建工程时PLC 类型选择多功能口(CNet 口) 项目
内容 OP320通讯口 9针通讯口
PLC 通讯口 PORT2口
缺省通信参数 9600bps 、
8bit 、1stop 、
Even
局号
1局
协议 Modbus Slave (RTU HEX )
通信距离(最大) 15米
通信方式 RS232
电缆型号 OP-LG-CAB0
开关量对应地址 M0000-M191F
数字量对应地址
D00000-D4500
OP-LG-CAB0连接图
在使用多功能口(CNet 口)通讯时PLC 在编程时需要一些参数
设置例如下图:
K120S示例:
K80S示例。

![LG_K120S_PLC使用手册(19)[1]](https://img.taocdn.com/s1/m/1bde51fb941ea76e58fa042e.png)

lg plc bsftp指令BSFTP(Batch SFTP)是LG PLC的指令之一,用于在PLC(可编程逻辑控制器)中进行SFTP(安全文件传输协议)通信。
本文将一步一步回答关于BSFTP指令的问题,包括如何配置SFTP连接、执行文件传输等操作,并对BSFTP指令的优势进行讨论。
第一步:配置SFTP连接首先,需要在LG PLC的程序中配置SFTP连接。
在PLC的程序编辑软件(如XG5000)中打开程序编辑界面,选择需要配置SFTP连接的PLC模块。
在该模块下,可以找到BSFTP指令相关的参数设置。
1. SFTP服务器地址:输入SFTP服务器的IP地址或域名。
2. SFTP服务器端口:输入SFTP服务器端口号,默认为22。
如果需要使用非标准端口号,可以在此处进行更改。
3. 用户名和密码:输入连接SFTP服务器所需的用户名和密码。
根据具体的SFTP服务器配置,可能会需要其他身份验证信息。
4. 文件传输类型:选择是下载(Get)文件还是上传(Put)文件。
5. 本地文件路径:输入本地文件的路径,如果是下载文件,则是文件保存的路径;如果是上传文件,则是要上传的文件的路径。
6. 远程文件路径:输入SFTP服务器上文件的路径,如果是下载文件,则是要下载的文件在服务器上的路径;如果是上传文件,则是文件在服务器上保存的路径。
7. 文件名:输入要下载或上传的文件的文件名。
第二步:执行文件传输配置完SFTP连接后,可以使用BSFTP指令执行文件传输操作。
在PLC 的程序中,找到需要执行文件传输操作的部分,在该部分内添加BSFTP 指令。
BSFTP指令有两个执行选项:1. Single Execution:单次执行选项。
使用此选项将只执行一次文件传输操作。
指定文件传输的方向(下载或上传)、本地文件路径、远程文件路径和文件名。
2. Program Execution:程序执行选项。
使用此选项将根据程序的执行顺序,重复执行文件传输操作。
PLC定位控制指令的使用说明
技术分享、学习交流、工控视频
1、相对定位
S.:表示脉冲数,脉冲数的正负表明控制方向,为正,Y2有输出,为负控制Y2没输出
S1.:表示发送脉冲的频率
D1.:表示高速脉冲输出口
D2.:表示方向信号
指令解读:在驱动条件成立时,把S.(D0)的脉冲数通过S1.(D2)的频率从
D1.(Y0)口输出,当S.(D0)位负值时,方向信号D2.(Y2)断开。
2、绝对定位
S.:表示绝对位置值,也就是原点到目标的位置,不管停在哪,都是走目标点
,是一个绝对距离。
指令解读:当驱动条件成立时,把S.(D10)的脉冲以S1.(D12)的频率
从D.(Y1)口发出,方向信号以本身位置距离远点判定。
3、原点回归
S.:表示回原点的速度,是一个频率值,单位为HZ
S1.:表示爬行速度,碰到近点开关信号接通时执行,单位为HZ。
S2.:表示近点信号
D.:表示脉冲输出口
指令解读:当驱动条件成立时,D.(Y0)开始以S.(D0)的频率往原点靠近,
当碰到S2.(X5)时,开始以S1.(D2)的频率回到原点
举例:双轴定位
十字滑台多点位置选择并作为控制程序
1、开机初始化程序
2、回原点程序
3、通过X输入触点或触摸屏上按钮采集点位,作用是记录点两轴当前交点
停留出的位置
4、启动两轴同时运行
5、Y0轴走完第一个点后停3秒继续下一个点位移动
6、Y1轴走完第一个点后停3秒继续下一个点位移动。
1、位置存动控制[POSJOG 0001 M0001 M0002]F34:当前位置地址;F280:伺服运行状态,1:运行;0:停止2、位置控制指令[POSCTR 0001 0000 ]3、当前位置预置[POSPRS 0001 00001000 ]4、PWM 输出[PWM 0001 0500 00010]运行通道(0~1)方向 0:正; 1:反速度 0:低速;1:高速运行通道(0~1)0:减速停止;1:紧急停止;2:故障停止运行通道(0~1)脉冲数450ms 输出运行通道(0~1)输出周期50ms 关断关断占空比(10%)T=500ms5、速度控制运行[POSVEL 0000 M0001 0000010000]6、速度改变指令[POSSOR 0000 000010000]7、位置绝对启动 [POSDST0001 M0001 00001000000000100000]8、原点返回[POSORG 0001 M0001 D0002]运行通道(0~1)方向 0:正; 1:反速度 5~100Kpps将0通道速度改变为10Kpps运行通道(0~1)速度位置速度(设定值0~100Kpps)运行通道(0~1) 绝对/相对坐标0:绝对; 1:相对位置地址(脉冲数)运行通道(0~1)方向 0:正; 1:反位置地址改为D0002和D0003中的值伺服电机ECMA-E21310ES15162728261234567232944212225N24P01C (D01)P01D (D02)P01E (D05)P 端子COMP42P40P044P046P045P047ASD-B2-1021 伺服驱动器17313033109111432354137UPGW VTSRAC~220VN X102。