2020年智能控制实验报告
- 格式:doc
- 大小:96.00 KB
- 文档页数:33
智能控制实验报告模板1. 引言在本次智能控制实验中,我们研究了智能控制的基本概念和应用。
通过实际操作,我们深入了解了智能控制系统的原理和设计方法。
本报告将详细介绍我们在实验中所进行的步骤、实验结果分析以及我们的总结和思考。
2. 实验目的本次实验的主要目的是探索智能控制系统的工作原理、学习其基本概念以及了解在实际应用中的方法。
具体目标如下:1. 熟悉智能控制的基本原理和概念;2. 了解智能控制系统的硬件和软件设计;3. 实践并掌握智能控制系统的参数调整和优化方法。
3. 实验步骤3.1 硬件搭建我们首先根据实验要求搭建了智能控制系统的硬件平台。
这个平台包括传感器、执行器和控制器等组件。
我们按照指导书的要求连接各个模块,并确保它们能够正常工作。
3.2 软件配置在硬件搭建完成后,我们开始进行软件配置。
我们根据实验要求,通过软件工具对智能控制系统进行编程,设置不同的控制策略和参数调整方法。
3.3 实验数据采集一切就绪后,我们开始采集实验数据。
通过传感器测量和执行器反馈,我们得到了系统运行过程中的各种参数和状态。
这些数据将用于后续的分析和优化。
3.4 参数调整与优化根据实验数据,我们对智能控制系统进行参数调整与优化。
我们通过反复试验,观察系统响应并调整参数,以达到最优控制效果。
4. 实验结果与分析我们根据实验数据和分析对比,得出以下实验结果与分析:1. 实验结果A- 数据分析A1- 结果评价A22. 实验结果B- 数据分析B1- 结果评价B2通过实验数据和分析,我们发现实验结果A 表现较好,系统响应稳定,控制效果较好。
而实验结果B 则存在一些问题,需要进一步优化。
5. 总结与思考通过本次智能控制实验,我们深入了解了智能控制系统的原理和设计方法。
在实验过程中,我们掌握了智能控制系统的搭建、参数调整与优化等关键技术。
通过对实验结果的分析,我们对智能控制系统的优势和应用范围有了更深入的理解。
然而,本次实验也存在一些问题和不足之处。
一、实习背景随着科技的飞速发展,智能化技术在各个领域的应用日益广泛。
为了更好地将所学理论知识与实践相结合,提升自己的专业素养和实际操作能力,我选择了智能控制专业进行为期一个月的实习。
本次实习地点为XX科技有限公司,该公司主要从事智能控制系统的研究、开发和生产。
二、实习目的1. 了解智能控制技术的基本原理和应用领域;2. 掌握智能控制系统的设计、调试和维护方法;3. 培养团队协作和沟通能力;4. 提高自己的实际操作能力和解决问题的能力。
三、实习内容1. 智能控制技术基础知识学习在实习初期,我重点学习了智能控制技术的基本原理和应用领域。
通过查阅资料、请教导师和同事,我对以下内容有了更深入的了解:(1)智能控制技术的基本概念和分类;(2)常见智能控制算法,如PID控制、模糊控制、神经网络控制等;(3)智能控制系统在工业、农业、医疗、家居等领域的应用。
2. 智能控制系统设计在实习过程中,我参与了多个智能控制系统的设计项目。
以下是我所参与的几个项目:(1)基于PLC的智能控制系统设计:该项目旨在利用PLC实现对工业生产过程的自动化控制。
我负责编写PLC程序,实现系统的控制逻辑和功能。
(2)基于模糊控制的智能家居系统设计:该项目旨在利用模糊控制算法实现对家庭环境的智能调节。
我负责设计模糊控制器,实现对空调、灯光、窗帘等设备的控制。
(3)基于神经网络的智能机器人控制系统设计:该项目旨在利用神经网络算法实现对机器人运动的智能控制。
我负责设计神经网络控制器,实现对机器人行走、避障等动作的控制。
3. 智能控制系统调试与维护在完成系统设计后,我参与了系统的调试和维护工作。
以下是我所参与的主要工作:(1)根据设计文档,对系统进行硬件和软件的调试,确保系统正常运行;(2)对系统进行性能优化,提高系统的稳定性和可靠性;(3)对系统进行定期维护,确保系统长期稳定运行。
4. 团队协作与沟通在实习过程中,我积极参与团队讨论,与同事共同解决问题。
一、实习背景随着科技的飞速发展,智能控制技术已经广泛应用于各个领域,成为推动社会进步的重要力量。
为了更好地了解智能控制技术,提高自身的实践能力,我于近期参加了智能控制实习实践。
本次实习在一家知名智能控制系统研发公司进行,实习期间,我深入了解了智能控制系统的设计、开发与应用,收获颇丰。
二、实习目的1. 熟悉智能控制系统的基本原理和组成;2. 掌握智能控制系统的设计、开发与调试方法;3. 培养实际动手能力,提高团队协作精神;4. 了解智能控制系统在各个领域的应用。
三、实习内容1. 理论学习实习初期,我通过阅读相关书籍、资料,了解了智能控制系统的基本概念、发展历程、分类及特点。
同时,我还学习了常见智能控制算法,如PID控制、模糊控制、神经网络控制等。
2. 实践操作在实习过程中,我参与了以下实践操作:(1)智能控制系统硬件平台搭建:根据项目需求,选择合适的传感器、执行器、控制器等硬件设备,进行电路设计、焊接、调试,完成硬件平台搭建。
(2)软件编程:使用C/C++、Python等编程语言,根据项目需求,编写控制算法程序,实现智能控制系统的功能。
(3)系统集成与调试:将硬件平台与软件程序相结合,进行系统集成,并进行调试,确保系统稳定运行。
(4)智能控制系统应用:将所学知识应用于实际项目中,如智能家居、机器人控制、自动化生产线等。
3. 项目参与在实习期间,我参与了公司的一个智能控制系统研发项目。
项目涉及多个方面,包括需求分析、系统设计、编程实现、调试与优化等。
通过参与项目,我了解了项目管理的流程,提高了自己的团队协作能力。
四、实习成果1. 理论知识方面:通过实习,我对智能控制系统的基本原理、组成、算法有了更深入的了解,为今后的学习和工作打下了坚实的基础。
2. 实践能力方面:在实习过程中,我学会了硬件平台搭建、软件编程、系统集成与调试等实际操作技能,提高了自己的动手能力。
3. 团队协作方面:在项目参与过程中,我学会了与他人沟通、协作,提高了自己的团队协作能力。
实习报告:智能控制一、实习背景随着科技的不断发展,人工智能技术逐渐应用于各个领域,智能控制成为现代工业生产中的重要技术手段。
在我国,智能控制技术在电气工程及其自动化专业中具有重要地位。
为了深入了解智能控制技术,提高实践能力,我参加了为期一个月的智能控制实习。
二、实习内容1. 了解智能控制的基本概念、原理和应用领域。
2. 学习智能控制算法,如模糊控制、神经网络控制、自适应控制等。
3. 掌握智能控制系统的设计与实现方法,包括硬件选型、软件开发等。
4. 参观智能控制相关企业,了解生产过程中的智能控制应用。
5. 参与实验室科研项目,实际操作智能控制系统。
三、实习过程1. 理论学习:在实习初期,我学习了智能控制的基本概念、原理和应用领域。
通过学习,我了解到智能控制是一种利用人工智能技术来实现控制目标的方法,它具有自主学习、自适应和智能化等特点。
智能控制广泛应用于工业生产、交通运输、医疗保健等领域。
2. 算法学习:在实习过程中,我学习了模糊控制、神经网络控制、自适应控制等智能控制算法。
通过理论学习和编程实践,我掌握了这些算法的原理和实现方法。
3. 系统设计:在实习中期,我参与了智能控制系统的设计与实现。
在硬件选型方面,我了解了各种传感器、执行器等硬件设备的功能和选用原则。
在软件开发方面,我学会了使用编程语言编写控制算法,并将其应用于实际系统。
4. 企业参观:在实习期间,我参观了智能控制相关企业,了解了生产过程中的智能控制应用。
通过实地参观,我看到了智能控制技术在实际生产中的重要作用,加深了对智能控制的理解。
5. 科研项目参与:在实习后期,我参与了实验室的科研项目。
在项目过程中,我实际操作了智能控制系统,解决了实际问题,提高了自己的实践能力。
四、实习收获通过这次实习,我对智能控制技术有了更深入的了解,掌握了智能控制算法、系统设计和实现方法。
同时,实习过程中的企业参观和科研项目参与,使我看到了智能控制技术在实际生产中的应用,提高了自己的实践能力和团队合作能力。
一、实习背景随着我国科技的快速发展,智能控制技术在各个领域的应用越来越广泛。
为了提高学生的实际操作能力和工程实践能力,我们学校特设立了智能控制室,旨在为学生提供一个实践操作的平台。
本报告主要针对智能控制室的实训内容进行总结和分析。
二、实习目的1. 掌握智能控制系统的基本原理和组成。
2. 熟悉智能控制室的各项设备操作。
3. 提高学生解决实际问题的能力。
4. 培养学生的团队合作精神。
三、实习内容1. 智能控制系统基本原理在实训过程中,我们首先学习了智能控制系统的基本原理。
智能控制系统主要由控制器、执行器、传感器和被控对象组成。
控制器根据传感器采集的信号和预设的控制策略,对执行器进行控制,从而实现对被控对象的调节。
2. 智能控制室设备操作(1)传感器:实训过程中,我们学习了各类传感器的原理和操作方法,如温度传感器、湿度传感器、光电传感器等。
(2)执行器:我们了解了执行器的种类、工作原理及操作方法,如电机、电磁阀、继电器等。
(3)控制器:实训中,我们学习了控制器的基本操作,如编程、调试等。
3. 实训项目(1)基于PLC的智能控制系统设计:我们利用PLC编程软件设计了一套智能控制系统,实现对某一过程的自动化控制。
(2)基于单片机的智能控制系统设计:我们利用单片机编程设计了一套智能控制系统,实现对某一过程的实时监测与控制。
(3)基于物联网的智能控制系统设计:我们利用物联网技术,设计了一套智能控制系统,实现对远程数据的采集、传输及处理。
四、实习收获1. 理论联系实际通过实训,我们将所学的理论知识与实际操作相结合,加深了对智能控制系统的理解。
2. 提高实践能力在实训过程中,我们学会了使用各类设备,提高了实际操作能力。
3. 培养团队合作精神在实训项目中,我们学会了与他人合作,共同解决问题,培养了团队合作精神。
4. 拓宽知识面实训过程中,我们接触到了物联网、云计算等新技术,拓宽了知识面。
五、实习体会1. 实训过程中,我们要注重理论与实践相结合,提高自己的实际操作能力。
实习报告智能控制技术实习报告一、实习背景随着科技的不断发展,智能控制技术在各个领域的应用越来越广泛。
为了更好地了解智能控制技术的发展和应用,提高自己的实践能力,我参加了为期一个月的智能控制技术实习。
实习期间,我在导师的指导下,进行了智能控制系统的设计、仿真和实验,对智能控制技术有了更深入的了解。
二、实习内容1. 理论学习在实习的开始,导师为我讲解了智能控制技术的基本概念、原理和常用算法。
我学习了模糊控制、神经网络控制、自适应控制等几种常见的智能控制方法,并了解了它们在实际工程中的应用。
2. 系统设计根据实习任务,我需要设计一个智能控制系统。
在导师的指导下,我首先确定了系统的目标和需求,然后选择了合适的控制算法,最后设计了系统的整体结构。
在设计过程中,我学习了如何根据系统需求选择合适的硬件和软件,并掌握了部分编程技巧。
3. 仿真与实验为了验证所设计的智能控制系统的有效性,我使用了MATLAB软件对系统进行了仿真。
通过调整参数和算法,我成功地实现了对系统的控制。
接着,我在实验室进行了实际实验,通过与传统控制系统的对比,验证了智能控制系统的优越性。
4. 实习总结与反思通过实习,我深刻地体会到了智能控制技术在实际工程中的重要性。
与传统控制技术相比,智能控制系统具有更好的自适应性和鲁棒性,能够更好地应对复杂的工业现场环境。
同时,我也认识到智能控制技术仍存在一些问题和挑战,如算法复杂度高、实时性要求高等。
在实习过程中,我学到了很多关于智能控制技术的知识和技能,也提高了自己的实践能力。
然而,我也意识到自己在某些方面仍有不足,如对某些算法的理解和应用不够深入,编程能力有待提高等。
在今后的学习和工作中,我将继续努力,不断提高自己的综合素质,为将来的工作做好准备。
三、实习收获通过这次实习,我对智能控制技术有了更深入的了解,掌握了相关算法和仿真技巧。
同时,实习过程中的团队合作和问题解决能力也得到了锻炼。
总之,这次实习让我受益匪浅,对我的专业学习和未来职业发展具有重要意义。
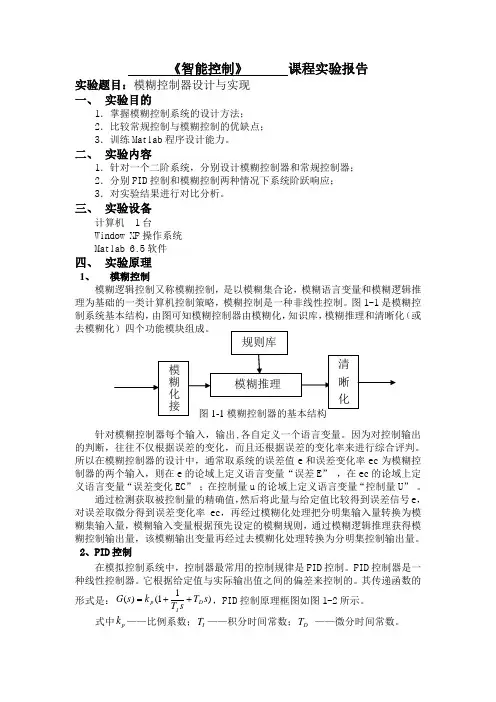
《智能控制》 课程实验报告实验题目:模糊控制器设计与实现 一、 实验目的1.掌握模糊控制系统的设计方法;2.比较常规控制与模糊控制的优缺点; 3.训练Matlab 程序设计能力。
二、 实验内容1.针对一个二阶系统,分别设计模糊控制器和常规控制器; 2.分别PID 控制和模糊控制两种情况下系统阶跃响应; 3.对实验结果进行对比分析。
三、 实验设备计算机 1台Window XP 操作系统 Matlab 6.5软件四、 实验原理1、 模糊控制模糊逻辑控制又称模糊控制,是以模糊集合论,模糊语言变量和模糊逻辑推理为基础的一类计算机控制策略,模糊控制是一种非线性控制。
图1-1是模糊控制系统基本结构,由图可知模糊控制器由模糊化,知识库,模糊推理和清晰化(或针对模糊控制器每个输入,输出,各自定义一个语言变量。
因为对控制输出的判断,往往不仅根据误差的变化,而且还根据误差的变化率来进行综合评判。
所以在模糊控制器的设计中,通常取系统的误差值e 和误差变化率ec 为模糊控制器的两个输入,则在e 的论域上定义语言变量“误差E ” ,在ec 的论域上定义语言变量“误差变化EC ” ;在控制量u 的论域上定义语言变量“控制量U ” 。
通过检测获取被控制量的精确值,然后将此量与给定值比较得到误差信号e ,对误差取微分得到误差变化率ec ,再经过模糊化处理把分明集输入量转换为模糊集输入量,模糊输入变量根据预先设定的模糊规则,通过模糊逻辑推理获得模糊控制输出量,该模糊输出变量再经过去模糊化处理转换为分明集控制输出量。
2、PID 控制在模拟控制系统中,控制器最常用的控制规律是PID 控制。
PID 控制器是一种线性控制器。
它根据给定值与实际输出值之间的偏差来控制的。
其传递函数的形式是:)11()(s T sT k s G D I p ++=,PID 控制原理框图如图1-2所示。
式中p k ——比例系数;I T ——积分时间常数;D T ——微分时间常数。
随着科技的飞速发展,智能控制技术在我国得到了广泛的应用和推广。
为了更好地了解和掌握智能控制技术,提高自身的实践能力,我们班级于2020年10月开展了智能控制技术认识实习活动。
本次实习旨在通过实际操作和理论学习,加深对智能控制技术的理解,为今后的学习和工作打下坚实基础。
二、实习目的1. 了解智能控制技术的基本概念、原理和发展趋势。
2. 掌握智能控制技术的常用算法和实现方法。
3. 通过实际操作,提高动手能力和解决实际问题的能力。
4. 培养团队合作精神,提高沟通协调能力。
三、实习内容1. 理论学习(1)智能控制技术的基本概念:智能控制技术是指利用计算机技术、网络通信技术、传感器技术、自动化技术等,对生产、生活、管理等领域进行智能化控制的一种技术。
(2)智能控制技术的原理:智能控制技术主要基于人工智能、模糊控制、神经网络、遗传算法等理论,实现对系统的自适应、自学习和自优化。
(3)智能控制技术的发展趋势:随着人工智能技术的快速发展,智能控制技术将朝着更加智能化、高效化、个性化的方向发展。
2. 实际操作(1)智能控制系统的搭建:本次实习主要使用Arduino开发板和配套传感器进行智能控制系统的搭建。
通过学习Arduino编程,实现对传感器的数据采集、处理和输出。
(2)智能控制算法的应用:在实际操作中,我们学习了PID控制算法、模糊控制算法和神经网络算法,并应用于智能控制系统中。
(3)智能控制系统的调试与优化:通过实际操作,我们学会了如何对智能控制系统进行调试和优化,以提高系统的性能和稳定性。
1. 理论知识方面:通过本次实习,我们对智能控制技术的基本概念、原理和发展趋势有了更深入的了解,为今后的学习和工作打下了坚实基础。
2. 实践能力方面:通过实际操作,我们提高了动手能力和解决实际问题的能力,学会了如何将理论知识应用于实际项目中。
3. 团队合作方面:在实习过程中,我们学会了与他人沟通、协作,提高了自己的沟通协调能力。
智能控制实践报告总结在智能控制实践中,我所参与的项目是基于神经网络的智能控制系统设计与实现。
通过对该项目的实践与研究,我深入了解了智能控制的基本原理和应用场景,并获得了一定的实践经验。
首先,在实践中,我学习到了神经网络在智能控制中的重要作用。
神经网络作为一种仿生智能模型,具有模式识别和学习能力,能够对复杂的非线性系统进行建模和控制。
通过对神经网络的学习和训练,我成功地设计了一个能够自主学习和优化控制策略的控制系统。
该系统能够根据实时的环境变化和反馈信号,自动调整神经网络的权重和阈值,从而实现对系统的智能控制。
其次,在实践过程中,我对智能控制系统的设计和实现流程有了更深入的了解。
我们团队首先对待控制系统进行建模,选择适当的输入和输出参数,以及合适的神经网络结构。
然后,针对实际应用中的数据采集和处理,我们设计了相应的工程任务,并对采集到的数据进行预处理和特征提取。
接着,我们使用训练集对神经网络进行学习和训练,并通过验证集和测试集来评估系统的性能。
最终,我们基于实际场景进行了系统的应用和优化。
最后,在智能控制实践中,我还学习到了团队合作和沟通的重要性。
在项目中,我们团队中的每个成员都担任着不同的角色和任务,我们需要密切合作,共同解决问题和完成任务。
通过团队的协作,我们成功地实现了智能控制系统,并且取得了不错的性能。
总结起来,智能控制实践让我充分认识到了神经网络在智能控制中的重要作用,并且提供了一个实践的平台,让我学习和掌握了智能控制系统的设计和实现流程。
同时,通过与团队的合作,我也意识到了团队合作和沟通的重要性。
这次实践经验对于我的学术和职业发展都具有重要的意义,我将进一步深化学习,不断提升自己在智能控制领域的专业能力。
一、实习背景随着科技的飞速发展,智能控制技术在各个领域得到了广泛应用。
为了更好地了解智能控制技术,提高自己的实践能力,我参加了为期一个月的智能控制实习。
实习期间,我深入了解了智能控制的基本原理、应用领域和实际操作,收获颇丰。
二、实习目的1. 理解智能控制的基本概念和原理;2. 掌握智能控制系统的设计与实现方法;3. 提高动手能力和团队协作精神;4. 培养创新意识和解决问题的能力。
三、实习内容1. 智能控制基础知识学习实习期间,我首先学习了智能控制的基本概念、原理和发展历程。
了解了智能控制技术涉及的主要领域,如模糊控制、神经网络控制、遗传算法控制等。
2. 智能控制系统设计与实现在掌握了智能控制基础知识后,我开始参与智能控制系统的设计与实现。
实习过程中,我参与了以下项目:(1)基于模糊控制的智能家居系统:该系统通过模糊控制器实现对家电的智能控制,提高家居生活的舒适性和安全性。
(2)基于神经网络的图像识别系统:该系统利用神经网络实现对图像的自动识别,应用于安防、医疗等领域。
(3)基于遗传算法的路径规划系统:该系统通过遗传算法实现机器人路径规划,提高机器人移动效率。
3. 团队协作与沟通在实习过程中,我与团队成员共同讨论、解决问题,培养了团队协作精神。
同时,通过与导师、同学的沟通交流,提高了自己的沟通能力。
四、实习收获1. 理论知识与实践相结合:通过实习,我深刻体会到理论知识与实践操作的重要性,提高了自己的实践能力。
2. 技能提升:掌握了智能控制系统的设计与实现方法,为今后从事相关工作奠定了基础。
3. 团队协作能力:在团队项目中,学会了与团队成员沟通、协作,提高了自己的团队协作能力。
4. 创新意识:在解决问题过程中,不断尝试新的方法和思路,培养了创新意识。
五、实习总结通过这次智能控制实习,我对智能控制技术有了更深入的了解,提高了自己的实践能力。
在今后的学习和工作中,我将不断努力,为我国智能控制技术的发展贡献自己的力量。
一、实训背景随着科技的飞速发展,智能化控制技术在各个领域的应用越来越广泛。
为了让学生更好地了解和掌握智能控制技术,提高实际操作能力,我们学院组织了一次为期两周的智能控制专业实训。
本次实训旨在通过理论学习和实践操作,使学生在智能控制领域具备一定的专业技能和实际操作经验。
二、实训目标1. 熟悉智能控制系统的基本原理和组成;2. 掌握智能控制系统的设计方法和实现步骤;3. 学会使用常用智能控制设备和软件;4. 提高学生分析问题和解决问题的能力;5. 培养学生的团队合作精神和创新意识。
三、实训内容1. 智能控制系统基本原理:介绍了智能控制系统的定义、分类、组成及工作原理,使学生了解智能控制系统的基本概念。
2. 智能控制算法:学习了常用的智能控制算法,如PID控制、模糊控制、神经网络控制等,并分析了这些算法的特点和应用场合。
3. 智能控制系统设计:通过实例讲解了智能控制系统的设计方法,包括系统需求分析、系统结构设计、控制器设计、执行机构设计等。
4. 智能控制设备与软件:介绍了常用智能控制设备和软件,如PLC、变频器、触摸屏等,并讲解了如何使用这些设备与软件进行系统调试。
5. 实践操作:学生分组进行实践操作,分别完成以下任务:(1)设计并实现一个简单的智能控制系统;(2)对现有智能控制系统进行优化;(3)分析并解决实际问题。
四、实训过程1. 理论学习:通过课堂讲解、自学等方式,使学生掌握智能控制系统的基本知识和常用算法。
2. 实践操作:学生在实验室进行实践操作,分组完成实训任务。
3. 指导教师指导:实训过程中,指导教师针对学生遇到的问题进行解答和指导,确保实训顺利进行。
4. 交流与讨论:实训结束后,学生分组进行交流与讨论,分享实训心得和经验。
五、实训成果1. 学生掌握了智能控制系统的基本原理和常用算法;2. 学生具备了一定的智能控制系统设计能力;3. 学生熟悉了常用智能控制设备和软件的使用;4. 学生提高了分析问题和解决问题的能力;5. 学生培养了团队合作精神和创新意识。
智能控制技术实习报告一、实习背景及目的随着科技的飞速发展,智能控制技术在各个领域中的应用日益广泛,为了更好地了解智能控制技术的原理及其在实际工程中的应用,提高自己的实践能力和综合素质,我参加了为期一个月的智能控制技术实习。
本次实习的主要目的是:1. 学习智能控制技术的原理及其在实际工程中的应用;2. 熟悉智能控制系统的基本组成、工作原理和操作方法;3. 培养自己的团队合作精神和实际操作能力。
二、实习内容1. 理论知识学习:在实习前期,我们参加了关于智能控制技术的基本理论知识培训,学习了模糊控制、神经网络、遗传算法等智能控制方法,了解了它们在实际工程中的应用和优势。
2. 实际操作练习:在实习过程中,我们参观了智能控制实验室,并在指导老师的帮助下,进行了智能控制系统的实际操作练习。
主要包括以下几个方面:(1)熟悉智能控制系统的硬件组成,如传感器、执行器、控制器等;(2)学习编程软件,如C/C++、Python等,用于编写控制算法程序;(3)根据实际需求,设计并实现简单的智能控制系统,如温度控制器、智能小车等;(4)对已设计的智能控制系统进行调试和优化,以提高控制效果。
3. 团队项目实践:在实习期间,我们以小组为单位,选择一个具有挑战性的项目进行实践。
我所在的团队选择了“智能温室控制系统”作为实践项目。
我们分工合作,完成了以下任务:(1)收集和分析温室控制的相关资料,了解其工作原理和需求;(2)设计温室控制系统的整体架构,包括硬件选型、软件架构等;(3)编写控制算法程序,实现对温湿度、光照等环境的智能控制;(4)对整个系统进行调试和测试,确保其稳定可靠运行。
三、实习收获通过本次实习,我收获颇丰,具体表现在以下几个方面:1. 丰富了理论知识:通过学习智能控制技术的原理及其在实际工程中的应用,我对智能控制系统有了更深入的了解,为以后的工作和学术研究奠定了基础;2. 提高了实际操作能力:在实习过程中,我学会了如何使用编程软件进行控制算法编程,熟悉了智能控制系统的硬件组成和操作方法,具备了实际操作的能力;3. 培养了团队合作精神:在团队项目实践中,我学会了与团队成员分工合作、共同解决问题,提高了自己的团队合作能力;4. 增强了实践能力:通过本次实习,我学会了如何将理论知识应用于实际工程中,提高了自己的实践能力和解决问题的能力。
第1篇一、实验目的1. 理解智能控制的基本概念和原理;2. 掌握智能控制系统的组成和结构;3. 熟悉MATLAB编程技术及SIMULINK仿真平台的使用;4. 通过实验验证智能控制算法在解决实际问题中的应用效果。
二、实验原理智能控制是自动控制理论的最新研究阶段,它结合了人工智能、专家系统、模糊逻辑、神经网络等技术,实现对复杂系统的有效控制。
智能控制的特点是无需建立被控对象的精确数学模型,具有自适应、自学习、自组织等能力。
三、实验内容1. 智能控制系统组成及结构分析;2. 专家控制系统设计;3. 模糊控制系统设计;4. 神经网络控制系统设计;5. 智能控制算法在SIMULINK仿真平台上的实现;6. 实验结果分析。
四、实验步骤1. 熟悉智能控制系统的基本概念和原理;2. 设计专家控制系统,包括知识库、推理机、解释器等模块;3. 设计模糊控制系统,包括模糊化、模糊推理、解模糊等模块;4. 设计神经网络控制系统,包括网络结构、学习算法、权值调整等模块;5. 在SIMULINK仿真平台上搭建智能控制系统,并进行仿真实验;6. 分析实验结果,验证智能控制算法的有效性。
五、实验结果与分析1. 专家控制系统:通过设计知识库、推理机、解释器等模块,实现了对特定问题的智能决策。
实验结果表明,专家控制系统具有较高的准确性和可靠性。
2. 模糊控制系统:通过模糊化、模糊推理、解模糊等模块,实现了对被控对象的模糊控制。
实验结果表明,模糊控制系统具有较好的鲁棒性和适应性。
3. 神经网络控制系统:通过设计网络结构、学习算法、权值调整等模块,实现了对被控对象的神经网络控制。
实验结果表明,神经网络控制系统具有较高的学习能力和泛化能力。
4. 智能控制算法在SIMULINK仿真平台上的实现:通过在SIMULINK仿真平台上搭建智能控制系统,验证了智能控制算法在解决实际问题中的应用效果。
实验结果表明,智能控制系统具有较高的控制性能。
六、实验总结通过本次实验,我们对智能控制的基本概念、原理、技术与应用有了更深入的了解。
一、实验目的1. 了解智能控制的基本原理和方法。
2. 掌握智能控制系统的设计和实现方法。
3. 熟悉智能控制实验平台的操作和应用。
二、实验原理智能控制是利用计算机技术、控制理论、人工智能等知识,实现对复杂系统的自动控制。
实验主要涉及以下原理:1. 模糊控制:利用模糊逻辑对系统进行控制,实现对系统不确定性和非线性的处理。
2. 专家控制:通过专家系统对系统进行控制,实现对系统复杂性和不确定性的处理。
3. 神经网络控制:利用神经网络强大的学习能力和泛化能力,实现对系统的自适应控制。
三、实验器材1. 实验平台:智能控制实验箱2. 传感器:温度传感器、湿度传感器、压力传感器等3. 执行器:电机、继电器、阀门等4. 控制器:单片机、PLC等5. 信号线、连接线等四、实验内容1. 模糊控制器设计(1)建立模糊控制模型:根据实验要求,确定输入、输出变量和模糊控制规则。
(2)设计模糊控制器:根据模糊控制规则,设计模糊控制器,包括模糊化、去模糊化等环节。
(3)仿真实验:利用仿真软件对模糊控制器进行仿真实验,验证控制效果。
2. 专家控制器设计(1)建立专家系统:收集专家知识,构建专家系统。
(2)设计专家控制器:根据专家系统,设计专家控制器,实现对系统的控制。
(3)仿真实验:利用仿真软件对专家控制器进行仿真实验,验证控制效果。
3. 神经网络控制器设计(1)建立神经网络模型:根据实验要求,确定神经网络的结构和参数。
(2)训练神经网络:利用实验数据对神经网络进行训练,提高网络的控制能力。
(3)设计神经网络控制器:根据训练好的神经网络,设计神经网络控制器,实现对系统的控制。
(4)仿真实验:利用仿真软件对神经网络控制器进行仿真实验,验证控制效果。
五、实验步骤1. 熟悉实验平台,了解各模块的功能和操作方法。
2. 根据实验要求,设计模糊控制器、专家控制器和神经网络控制器。
3. 利用仿真软件对控制器进行仿真实验,验证控制效果。
4. 分析实验结果,对控制器进行优化和改进。
一、实习背景随着科技的不断发展,智能化技术已经渗透到我们生活的方方面面。
智能控制作为智能化技术的重要组成部分,其在工业、农业、家居等多个领域的应用越来越广泛。
为了深入了解智能控制技术,提高自身实践能力,我参加了本次智能控制认知实习。
二、实习目的1. 了解智能控制的基本概念、原理及发展现状。
2. 掌握智能控制技术在各个领域的应用。
3. 提高动手实践能力,培养创新思维。
三、实习内容1. 智能控制基础知识学习在实习期间,我们学习了智能控制的基本概念、原理和发展历程。
智能控制是指利用计算机技术、通信技术、传感器技术等,实现对各种设备和系统的自动控制。
智能控制技术主要包括模糊控制、神经网络控制、专家系统控制等。
2. 智能控制应用领域认知实习期间,我们参观了多个应用智能控制技术的企业,了解了智能控制在工业、农业、家居等领域的应用。
(1)工业领域:智能控制在工业领域的应用主要体现在生产线自动化、机器人控制、智能检测等方面。
通过智能控制技术,可以实现生产过程的自动化、高效化,提高产品质量和生产效率。
(2)农业领域:智能控制在农业领域的应用主要体现在智能灌溉、病虫害防治、温室环境控制等方面。
通过智能控制技术,可以实现农业生产的智能化、精准化,提高农作物产量和品质。
(3)家居领域:智能控制在家居领域的应用主要体现在智能家居、智能家电等方面。
通过智能控制技术,可以实现家居环境的舒适、安全、节能,提高人们的生活品质。
3. 实践操作在实习期间,我们参与了智能控制系统的设计、调试和运行。
具体操作如下:(1)设计智能控制系统:根据实际需求,选择合适的控制算法,设计智能控制系统。
包括硬件选型、软件编程、控制策略等。
(2)调试智能控制系统:对设计好的智能控制系统进行调试,确保其正常运行。
包括硬件调试、软件调试、参数调整等。
(3)运行智能控制系统:将调试好的智能控制系统应用于实际场景,观察其运行效果。
四、实习收获1. 深入了解了智能控制的基本概念、原理及发展现状。
一、前言随着科技的不断发展,智能化技术在我国各行各业的应用日益广泛。
为了提高我国智能控制领域的技术水平,培养具备实际操作能力的专业人才,我们参加了智能控制室实训。
本次实训旨在通过实际操作,深入了解智能控制技术,提高自身实践能力。
以下是本次实训的总结报告。
二、实训目的1. 了解智能控制技术的基本原理和实际应用;2. 掌握智能控制设备的操作方法;3. 培养团队协作精神和实际动手能力;4. 提高对智能控制系统的分析和解决问题的能力。
三、实训内容1. 智能控制技术基础理论:学习智能控制的基本概念、原理、方法及其在各个领域的应用。
2. 智能控制设备操作:学习使用智能控制设备,如PLC、变频器、传感器等,进行实际操作。
3. 智能控制系统设计:根据实际需求,设计并搭建智能控制系统,实现特定功能。
4. 智能控制系统调试与优化:对搭建的智能控制系统进行调试,确保系统稳定运行,并对系统进行优化。
5. 智能控制案例分析:分析实际工程项目中的智能控制案例,了解智能控制技术的实际应用。
四、实训过程1. 实训初期,我们学习了智能控制技术的基本原理和实际应用,掌握了智能控制设备的操作方法。
2. 在智能控制系统设计阶段,我们根据实际需求,设计并搭建了智能控制系统。
在此过程中,我们学会了如何选用合适的智能控制设备,如何进行系统搭建和接线。
3. 在系统调试与优化阶段,我们针对搭建的智能控制系统进行了调试,确保系统稳定运行。
同时,我们对系统进行了优化,提高了系统的性能。
4. 在实训过程中,我们积极参与讨论,相互学习,共同解决实际问题。
通过团队合作,我们顺利完成了实训任务。
五、实训收获1. 理论知识与实践相结合:通过本次实训,我们深刻认识到理论知识与实践操作的重要性,二者相辅相成,缺一不可。
2. 提高动手能力:在实训过程中,我们学会了如何使用智能控制设备,掌握了实际操作技能。
3. 培养团队协作精神:实训过程中,我们学会了与他人沟通、协作,共同完成实训任务。
智能控制实习报告范文一、实习目的与意义随着科技的不断进步,智能控制技术在各个领域得到了广泛的应用。
本次实习旨在通过实际操作和项目实践,加深对智能控制理论的理解,掌握智能控制系统的设计、开发和调试的基本技能,为将来在智能控制领域的工作和研究打下坚实的基础。
二、实习内容与过程1. 理论学习在实习的初期,我们首先进行了智能控制理论的学习,包括但不限于模糊控制、神经网络控制、遗传算法等。
通过阅读相关文献和教材,我们对智能控制的原理和方法有了初步的了解。
2. 系统设计与仿真在理论学习的基础上,我们进行了智能控制系统的设计与仿真。
利用MATLAB/Simulink等工具,我们设计了一个简单的智能控制系统,并进行了仿真实验,验证了系统设计的可行性。
3. 实际系统开发在仿真实验的基础上,我们开始了实际的硬件开发。
根据设计需求,我们选择了适当的传感器、控制器和执行器,并进行了电路设计和硬件搭建。
在硬件搭建过程中,我们遇到了一些技术难题,但在老师和同学的帮助下,最终成功完成了硬件的搭建。
4. 系统调试与优化硬件搭建完成后,我们进行了系统的调试工作。
通过调整参数和优化算法,我们使系统的性能得到了显著的提升。
在调试过程中,我们学会了如何分析问题和解决问题,这对我们的工程实践能力的提升起到了重要作用。
三、实习成果与反思1. 实习成果通过本次实习,我们不仅掌握了智能控制系统的设计、开发和调试的基本技能,还学会了如何运用理论知识解决实际问题。
此外,我们还提高了团队协作能力和工程实践能力。
2. 实习反思在实习过程中,我们也意识到自己在理论知识和实践技能方面还存在一些不足。
例如,在系统设计时,对于一些复杂的控制算法理解不够深入;在硬件搭建时,对于一些电路设计的细节处理不够细致。
针对这些问题,我们将继续学习和实践,不断提高自己的专业能力。
四、实习总结通过本次智能控制实习,我们对智能控制技术有了更深入的了解和认识。
实习不仅提高了我们的专业技能,也锻炼了我们的实践能力和团队协作能力。
智能控制实验报告
姓名
学院
专业自动化班级
学号
指导教师
成绩
2019 年 12 月 25 日
实验一
模糊控制在角度随动系统中的应用一、实验目的与意义学习 Matlab 中建立模糊控制器的方法;了解模糊控制在角度随动系统中的
应用。
二、实验内容在 Matlab 中建立模糊控制器,将生成的模糊规则表插入程序代码中,交叉
编译代码,下载到目标版中进行测试。
1 、Matlab 文本模式建立模糊控制器(必做)
2 、利用 Matlab 模糊逻辑工具箱建立模糊控制器(选做)
3 、模糊控制器 Simulink 仿真(必做)
4 、嵌入式程序交叉编译(选做)
三、实验结果 1 、matlab 文本模式建立模糊控制器 %Fuzzy Controller Design clear all;
close all;
%新建 FIS a=newfis("myfuzzy");
%输入e,范围[-48,48],7 个模糊语言,NB,NM,NS,Z,PS,PM,PB
a=addvar(a,"input","e",[-48 48]);
%Parameter e a=addmf(a,"input",1,"NB","trimf",[-48 -36 -24]); a=addmf(a,"input",1,"NM","trimf",[-36 -24 -12]); a=addmf(a,"input",1,"NS","trimf",[-24 -12 0]); a=addmf(a,"input",1,"Z","trimf",[-12 0 12]); a=addmf(a,"input",1,"PS","trimf",[0 12 24]); a=addmf(a,"input",1,"PM","trimf",[12 24 36]);
a=addmf(a,"input",1,"PB","trimf",[24 36 48]);
%输入ec,范围[-64,64],7 个模糊语言,NB,NM,NS,Z,PS,PM,PB a=addvar(a,"input","ec",[-64 64]);
%Parameter ec a=addmf(a,"input",2,"NB","trimf",[-64 -48 -32]); a=addmf(a,"input",2,"NM","trimf",[-48 -32 -16]); a=addmf(a,"input",2,"NS","trimf",[-32 -16 0]); a=addmf(a,"input",2,"Z","trimf",[-16 0 16]); a=addmf(a,"input",2,"PS","trimf",[0 16 32]); a=addmf(a,"input",2,"PM","trimf",[16 32 48]); a=addmf(a,"input",2,"PB","trimf",[32 48 64]);
%输出u,范围[-90,90],7 个模糊语言,NB,NM,NS,Z,PS,PM,PB a=addvar(a,"output","u",[-90 90]);
%Parameter u a=addmf(a,"output",1,"NB","trimf",[-90 -65 -45]); a=addmf(a,"output",1,"NM","trimf",[-65 -45 -25]); a=addmf(a,"output",1,"NS","trimf",[-45 -25 0]); a=addmf(a,"output",1,"Z","trimf",[-25 0 25]); a=addmf(a,"output",1,"PS","trimf",[0 25 45]); a=addmf(a,"output",1,"PM","trimf",[25 45 65]); a=addmf(a,"output",1,"PB","trimf",[45 65 90]);
%模糊规则表,7*7=49 行,5 列 rulelist=[1 1 1 1 1;
1 2 1 1 1;
1 3 1 1 1;
1 4
2 1 1;
1 5
2 1 1;
1 6 3 1 1;
1 7 4 1 1;
2 1 1 1 1;
2 2 1 1 1;
2 3 1 1 1;
2 4 2 1 1;
2 5 2 1 1;
2 6
3 1 1;
2 7 4 1 1;
3 1 1 1 1;
3 2 2 1 1;
3 3 2 1 1;
3 4 3 1 1;
3 5
4 1 1;
3 6 5 1 1;
3 7 6 1 1;
4 1 1 1 1;
4 2 3 1 1;
4 3 3 1 1;
4 4 4 1 1;
4 5 5 1 1;
4 6 6 1 1;
4 7 7 1 1;
5 1 2 1 1;
5 2 3 1 1;
5 3 4 1 1;
5 4 5 1 1;
5 5
6 1 1;
5 6 7 1 1;
5 7 7 1 1;
6 1 3 1 1;
6 2 4 1 1;
6 3 5 1 1;
6 4 6 1 1;
6 5
7 1 1;
6 6
7 1 1;
6 7 7 1 1;
7 1 4 1 1;
7 2 5 1 1;
7 3 6 1 1;
7 4 6 1 1;
7 5 7 1 1;
7 6 7 1 1;
7 7 7 1 1;
];
a=addrule(a,rulelist); %showrule(a)。