高速电主轴系统的在线动平衡及其仿真研究
- 格式:pdf
- 大小:988.79 KB
- 文档页数:5
高速电机转子的动平衡与动态特性研究对于电机工程领域具有重要意义。
电机作为现代工业中不可或缺的设备之一,其性能直接影响到生产效率和设备稳定性。
在高速电机领域,由于旋转速度较快,转子的平衡性和动态特性显得尤为关键。
本文将深入探讨高速电机转子的动平衡与动态特性,通过实验研究和理论分析,为高速电机的设计和运行提供参考。
首先,本文将介绍高速电机的基本原理和结构。
高速电机是一种特殊的电机类型,其转子运行速度通常在数千转每分钟以上,工作环境要求严苛。
在介绍电机结构的基础上,我们将重点讨论转子的设计和加工工艺,探究影响转子动平衡和动态特性的关键因素。
其次,本文将详细分析高速电机转子的动平衡技术。
动平衡是保证转子在高速旋转过程中不产生振动和噪音的重要手段。
我们将介绍动平衡的原理和方法,包括静平衡和动平衡的区别,动平衡试验的步骤和注意事项等。
通过实验验证和数据分析,我们将探讨动平衡对高速电机性能的影响,并提出优化建议。
随后,本文将深入探讨高速电机转子的动态特性。
转子的动态特性包括振动响应、共振频率、模态分析等方面。
我们将结合有限元分析和实验测试,揭示高速电机转子在不同工况下的动态响应特点,探讨影响动态特性的因素。
通过对动态特性的研究,我们可以为电机设计和振动控制提供理论支持。
最后,本文将总结高速电机转子的动平衡与动态特性研究成果,并展望未来的研究方向。
高速电机领域的发展离不开对转子性能的不断优化和提升,动平衡与动态特性研究在此过程中起着至关重要的作用。
我们希望通过本文的研究,为高速电机领域的科研工作者和工程技术人员提供参考和借鉴,推动高速电机技术的发展和应用。
3.2提高企业竞争力随着工业发展的转型升级,其机械化水平在飞速提高。
机械设备朝着大型化、信息化的方向发展。
在高科技、高尖端器械出现的同时,对其进行维修的技术含量也在不断提高,这也体现了维修的重要性,给维修企业带来广阔的发展前景。
提高维修技术、优化维修服务对汽车维修企业的生存发展十分重要。
在经济全球化的大趋势下,企业不仅要面对国内同行的激烈竞争,还要面对国际市场的挑战,企业想要更好的生存和发展,提高竞争力十分必要。
在重视“绿色”发展的当下,政府对“绿色产业”的重视程度不断提高,出台相关的保护政策,更好的推进“绿色产业”的发展。
“绿色企业”是这个时代企业发展的主流,只有在汽车维修企业中推广“绿色维修”才能抢占市场先机,获得更好的发展机会。
环境污染程度大、资源利用率低的汽车维修企业,其发展的局限性显而易见。
汽车维修企业推广“绿色维修”,需要选择先进的科学的维修技术和新型环保材料,实现企业经济效益的同时,实现社会效益和环境效益。
只有这样的维修企业,才能在社会发展过程中,成为汽车维修行业的最大获益者,激烈竞争下的生存者。
传统的汽车维修企业必将遭到淘汰。
在汽车维修企业中推行“绿色维修”,无论是对企业自身、行业发展,乃至社会国家的发展,都有不可估量的价值。
4结束语“绿色维修”可以对经济效益的增长和环境效益的增加起到双管齐下的作用。
最大程度地减少资源和能源的使用量,降本增效,为生态环境的保护贡献自己的力量。
无论从经济发展的视角,还是从环境保护和社会发展的角度分析,“绿色维修”都是符合五大发展理念。
“绿色维修”使多方面的综合性的体系模式,推行“绿色维修”也是有利于可持续发展,“绿色维修”在汽车维修企业的不断推广,是实现维修行业可持续发展的重要手段。
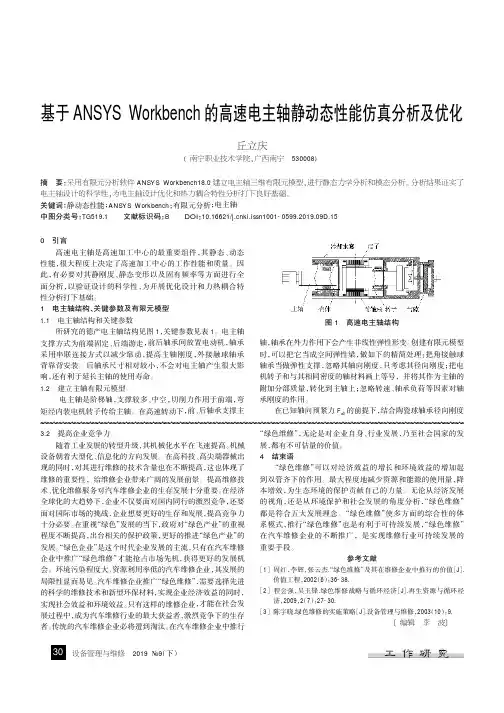
参考文献[1]周红,李辉,张云杰.“绿色维修”及其在维修企业中推行的价值[J].价值工程,2002(6):36-38.[2]程会强,吴玉锋.绿色维修战略与循环经济[J].再生资源与循环经济,2009,2(7):27-30.[3]陈宇晓.绿色维修的实施策略[J].设备管理与维修,2003(10):9.〔编辑李波〕基于ANSYS Workbench的高速电主轴静动态性能仿真分析及优化丘立庆(南宁职业技术学院,广西南宁530008)摘要:采用有限元分析软件ANSYS Workbench18.0建立电主轴三维有限元模型,进行静态力学分析和模态分析。
超高速电机转子的动平衡技术研究随着科技的进步和工业的发展,电机在我们的日常生活中扮演着越来越重要的角色。
超高速电机作为电机家族的重要组成部分,具有转速高、功率大、效率高等优点,广泛应用于航空航天、能源和交通等领域。
然而,超高速电机转子的动平衡问题却成为了研究者们面临的重要挑战。
超高速电机转子的动平衡是保证电机运行稳定性和效率的关键。
动平衡技术是通过在转子上添加平衡块或者通过调整转子的质量分布,使得转子在高速旋转时能够保持平衡。
首先,我们需要理解什么是动平衡。
动平衡即使转子在运转中,都能够保持绕中心轴线旋转,而不产生外力矩的状态。
当电机转子存在不平衡时,会引起振动、噪声和磨损等问题,甚至导致电机失效。
在超高速电机转子的动平衡技术研究中,同时需要考虑到静平衡和动平衡两个方面。
静平衡是指在不转动的情况下,转子质量中心与轴线重合的状态。
动平衡则更加复杂,需要考虑转子的质量不仅在静止时平衡,同时在高速旋转时也能够保持平衡。
超高速电机转子的动平衡技术研究主要包括动平衡质量的确定和动平衡方法的选择。
对于动平衡质量的确定,研究者们通常使用动平衡试验台进行实验测定。
试验台利用传感器测量转子的振动信号,通过数据处理和分析,计算得出动平衡质量。
这一过程需要准确的测量装置和灵敏的传感器,以及高效的数据分析算法。
有些研究者还利用数值模拟方法进行动平衡质量的优化设计,通过在计算机中模拟转子的运行状态,找到合适的平衡块位置和质量,以达到最佳的动平衡效果。
在动平衡方法的选择上,不同的研究者有不同的思路和方法。
一种常见的方法是在转子上添加平衡块,通过增加或减少平衡块的质量,来调整转子的质量分布,使其达到动平衡的要求。
另一种方法是调整轴的几何形状,来达到动平衡的效果。
还有一些研究者尝试使用主动控制系统来实现动平衡,通过感应转子的振动信号,控制系统可以实时调整平衡块的位置和质量,以实现转子的动平衡。
动平衡技术的研究不仅需要理论上的分析和计算,还需要实验验证。
第l章绪论1.2国内外研究状况电予鬻速切溅麴工怼旋转刀爨握窭了严掺戆秘平餐要求,磅炎离速旋转乃昊的动平衡技术、有效控制刀具不平衡量是研制开发和推广废用高速切削技术的必饕菠提露瓣套技本。
刀具弱动乎,鬓蒙理与一般旋转零{牛验动乎餐激理媚酝。
蓄宠,刀县结构的设计应尽可能对称;其次,在需接对刀舆进行平衡时,可根据测出的不平餐量采嬲刀橛去重或调繁配重等方法实现乎餐。
图1*l美国Balad)rIle公司开发的在线乎衡系统Fig毽糟l—lB《稿ynesystcmof碱搿妇毽。
瞄i珏。
但是,用户在加工现场使用刀具时,巍于对工其系统避行缝合及对刃襁与主轴进行连接对均可能产生一定偏心量,从而使经过预先平衡的刀具产生新的不平衡,因此,开发一种自&使整个刀具一刃栖一圭皴系统在驱动状态下实现平鸳敬在线平衡系统极具实用价值,利用该系统甚至裔可能直接使用未经预兔平衡的刀具组件进行加工。
在线动平衡楚一种不影响主辆正常工作的平搬技术。
它是利用振动匿l-2美国Kenna搬etal公司开发鳇在线乎糖系绕Fi磬啪l-2Kenname纽1systemofb北mcingo卅Iin8传感器程魄气检溅装置,在线捡溅凄工终状态下转予翡禾乎簿量戆大枣及稳经,然后根据此信息,自动控制平衡机构工作,使熊产生相应的校正平衡爨,并与原始不第2章幼平衡理论介绍含戏不平餐鬓鼍褰现与主辘系绕黥不平褥量V豹平衡。
平衡磊两平衡环与主轴紧圜连接。
转予动平衡的尽鸵戴是保证转子在琰场糍平穗的运行。
对于现场动平衡平餐糟度的谬定爨无疑闯应农整虮试验套上或最终装聚下螅理场进行。
《潋粟爆F瑟瑶2.8快速动平衡装置藏瑾搿Figu恐2-8Thesehem鑫蛀cdia嚣隧旗唾毪lck鸯弱a搬妻cb撼8珏。
&vice一些参数中的任一莉寒湃定:不平衡力弓i起的振动、辘承力、剩余不平衡量。
不乎鬻力弓l起黪振动是捂袁现场动平衡中邋过测试经瑗场麓平衡校正藉的梳缝的搬动米礁定转予平簿状态是磴满意。
高速主轴动平衡及其在线控制技术章云1,梅雪松1,2(1.西安交通大学机械工程学院,西安710049;2.西安交通大学机械制造系统工程国家重点实验室,西安710049)[摘要]针对机床主轴在线自动平衡控制问题,阐述了高速主轴不平衡识别方法和在线自动平衡技术国内外现状,分析了喷液式在线自动平衡装置原理,设计了喷液式平衡系统,并通过高速主轴实验对该系统的有效性进行了验证。
研究结果表明,主轴经过平衡后,不平衡量振动值由1.60mm/s降至0.34mm/s,主轴失衡振动得到了有效抑制。
[关键词]高速主轴;在线动平衡;振动控制[中图分类号]TH113.25[文献标识码]A[文章编号]1009-1742(2013)01-0087-061前言现代化的高速数控加工中心具有主轴转速高、运行精度高、加工效率高的特点。
转速和精度的提高是以高精度动平衡为前提的,但对于主轴而言,由于制造、安装误差以及材料的不均匀等因素,不平衡的存在是必然的。
由于运转在高速下,主轴对不平衡控制的要求比通常转子更加严格,微小的不平衡都可能导致主轴回转精度的严重丧失乃至轴承支承系统的失稳。
只有将主轴残余不平衡量控制在一定范围内,才能抑制主轴在高速运行过程中的失衡振动,保证零件的加工精度。
为减小主轴的不平衡,在设计之初应尽量避免不对称结构,在加工装配过程中尽量减小误差。
即便如此,主轴不平衡也不可能被完全消除,因此,主轴出厂时会进行初始动平衡以减小主轴失衡量。
然而,主轴刀具微小的不对中、磨损或粘刀仍会破坏原有的动平衡。
另外,主轴刀具系统受切削力激励、热变形以及高速旋转离心力等复杂工况的干扰,也会破坏主轴的动平衡,从而使得高速机床主轴系统的稳定性被破坏。
显然,若每次都采用传统离线停机动平衡的方式来消除微小失衡量,就意味着自动化环节的中断,破坏了高效加工的原则。
因此,开展高速主轴动平衡与其在线控制技术的研究,能充分发挥高速主轴的效能,保障机床的长期稳定和高效运行,进而提高我国机床工业和机械制造业的整体水平。
基于DSP的高速主轴在线动平衡控制系统设计
门浩;伍良生;杨庆坤;贺江波
【期刊名称】《微计算机信息》
【年(卷),期】2006(000)10Z
【摘要】本文介绍了一种使用TI公司高速数字信号处理器(DSP)
TMS320F2812芯片控制的高速电主轴在线动平衡控制系统及其控制策略,根据
平衡环的矢量变换和振动平衡原理,提出一种高效的控制策略,建立了电主轴平衡环控制系统的数学模型,并通过对电主轴动平衡状态进行仿真,验证了数学模型和平衡方法,这对显著降低高速电主轴的振动强度。
提高加工质量的目的有重要意义。
【总页数】3页(P40-42)
【作者】门浩;伍良生;杨庆坤;贺江波
【作者单位】北京工业大学,100022
【正文语种】中文
【中图分类】TP29
【相关文献】
1.基于DSP的双控制器环境控制系统设计 [J], 张彤;毛日升;张海鹰;高艳丽
2.以DSP为核心的高速主轴在线动平衡控制器的设计 [J], 伍良生;张云禧;周大帅;
朱美玲
3.基于DSP的高速主轴在线动平衡控制系统设计 [J], 门浩;伍良生;杨庆坤;贺江波
4.基于DSP和模糊控制的巡线机器人控制系统设计与实现 [J], 赵锦芝;杨威
5.基于DSP的单周控制三相有源电力滤波器控制系统设计 [J], 韩民强;孔凡旭;李晓岩
因版权原因,仅展示原文概要,查看原文内容请购买。