日光温室自主寻迹喷药车设计方法研究
- 格式:pdf
- 大小:585.24 KB
- 文档页数:7
温室无人自动喷雾系统设计摘要:为减少农药使用量,提高农产品质量并保障工作人员健康,设计了适用于温室的无人自动喷雾系统。该系统由控制器、喷雾执行机构以及轨道三部分组成。为适用于不同的温室环境,该系统通过控制步进电机的工作方式和转速来控制喷雾执行机构的工作方向和行走速度,能够实现温室的无人自动喷雾。关键词:温室;无人自动喷雾系统;控制器;步进电机Design for Unmanned Automatic Spray System of GreenhouseAbstract: An unmanned automatic greenhouse spray system was designed in order to reduce pesticide use,to improve the quality of agricultural products and protect operator health. The system consists of three parts: controller, sprayer unit and track. The control of the manner and speed of stepper motor of the system achieved by controlling the walking direction and speed of sprayer. So it could realize unmanned automatic spray in greenhouse and could be applied to different greenhouse.Key words: greenhouse; unmanned automatic spray system; controller; stepper motor近年来我国设施农业发展迅速,设施农业面积与产品产量均稳居世界首位。相对传统农业,设施农业农药使用次数多,使用量大,农产品的农药残留量严重。因此,采用先进的控制技术,研制和开发新型温室内专用施药装备,对于提高农药使用效率,最大程度减少农药残留和环境污染,提高现代农业发展的经济效益、社会效益和环境效益具有重大意义[1-4]。目前发达国家应用于温室的植保机械基本实现了产品的市场化和品种的系列化,能适应不同规模及用途的设施内使用农药的要求。美国Rowe等[5]设计的温室自动喷药系统由药箱、空气压缩机、喷药装置、控制药箱压力和操作定时器组成,该系统可以在晚上工作。Dramm Autofog喷雾系统采用一个自动的烟雾生成器和一个循环风扇进行自动喷施[6]。意大利的Belforte等[7]研发了用于温室的机器人系统。日本常温烟雾机采用静电喷雾技术对药剂的微粒给予高压静电,使其与作物之间产生静电引力而吸附于作物。但这些系统造价普遍偏高,在我国还难以普及推广。国内相关科研院所也进行了相关的研究与开发。南京农机化研究所研制的3YC-50型温室专用常温烟雾机实现了喷射与操控空间的完全分离,主要用于温室内蔬菜和花卉的病虫害防治[8]。陈志青[9]研究了智能对靶喷雾室内机器人系统,该系统利用配套的动力喷雾机完成喷雾作业。陈艳巧[10]对温室型电动弥雾机进行了改进,保证雾滴在一定喷幅内被均匀地弥散在作物上。针对温室内空间密闭、温度高和湿度大的特点,本课题组设计了一种超低量、小雾滴,能够用于温室的自动喷雾系统。该系统通过步进电机控制喷头的位置,电磁阀控制喷头的流量,从而实现系统的精准喷药。1温室无人自动喷雾系统设计温室无人自动喷雾系统主要由喷雾机构、控制器和轨道组成。系统组成结构如图1所示。为实现喷雾机构在温室内自动行走并执行喷洒作业,设计了一个导轨,该导轨沿温室长轴方向搭建,导轨上安装一个可以滑动的小车,小车由步进电机控制沿导轨滑行。在导轨上自由运动的小车带动喷杆沿预订轨道做往复运动。为实现喷头流量的自动调节,在药液输出端安装一个电磁阀,该电磁阀由控制器控制其开关,从而实现无人喷雾。系统控制器主要控制系统的行走速度和喷头流量,是整个喷雾系统的关键组成部分,施药系统各功能的实现和工作质量很大程度上都依赖于控制器的设计。根据控制器的功能要求,选择AT89C52单片机作为控制器。控制系统结构如图2所示。2温室无人自动喷雾系统控制设计控制系统主要功能是根据输入信号对喷头位置与流量进行实时控制。控制系p 按照表1制成一张状态表并存放到内存中。控制器按照步进电机正、反转的控制要求,将状态表的内容取出来并送至P1口,从而实现对步进电机工作方式的控制。步进电机转速控制是通过控制各通电状态持续时间的长短,即系统发出CP脉冲的频率或者换相的周期。AT89C52单片机系统可以通过两种办法确定CP脉冲的周期:软件延时和定时器延时法。本系统采用软件延时的方法实现。2.2电磁阀的控制在系统中,电磁阀响应速度是关键性的控制参数,电磁阀响应速度太慢会导致喷杆末端的喷头流量无法实现预期的控制效果。故选用德国Burkert公司生产的6223型电磁阀,该电磁阀的响应时间以微秒级为单位。控制器通过编程控制I/O口(P0)输出控制信号,P0口通过光电隔离电路后与三极管的基极相接。经过三极管放大电路使电流达到可以驱动电磁阀正常工作的330 mA。当P0口输出的控制信号为高电平时,发光二极管导通,加在三极管基极的电势等于Vcc,促使三极管导通,电磁阀继电器控制端被接通,电磁阀打开开始喷雾;当P0口输出的控制信号为低电平时,发光二极管中断,加在三极管基极的电势等于零,三极管截止,电磁阀继电器控制端被断开,电磁阀关闭停止喷雾。3小结目前,背负式手动喷雾机是我国温室内主要的施药机具,存在着喷雾质量差、喷雾不均匀、操作者与农药直接接触等问题。针对这一问题,设计了温室自动喷雾系统。温室自动喷雾系统主要由喷雾机构、控制器和轨道三部分组成,其中控制器通过控制步进电机的行走方向和速度,来实现控制喷杆在轨道上的行走;通过控制电磁阀的开关实现自动喷雾。操作者通过控制器来实现对喷雾执行机构的自动控制。该系统能够有效减少环境污染,保护操作人员的安全,对改进我国温室施药技术具有重要意义。参考文献:[1] 张霞. 温室蔬菜病虫为害的特点及综合防治技术[J]. 内蒙古农业科技,2006(7):27-28,31.[2] 李晓仁,李虹,魏文生. 日光温室病虫害发生原因浅析与综合防治对策[J]. 北方园艺,2000(4):45-46.[3] 初江,徐丽波,姜丽娟,等. 设施农业的发展分析[J]. 农业机械学报,2004,35(3):191-192.[4] 赵创建, 张茂团,千琼丽. 温室蔬菜病虫害发生特点及防治对策[J]. 西北园艺,2006(1):29-30.[5] ROWE D E,MALONE S,YATES Q L. Automated greenhouse spray system for increased safety and flexibility[J]. Crop sci, 2000,40(4):1176-1179.[6] SIDAHMED M M, BROWN R B. Simulation of spray dispersal and deposition from a forestry airblast sprayer——Part 1: Air jet model[J]. Transactions of the ASAE,2001,44(1):5-10.[7] BELFORTE G,DEBOLI R,GAY P,et al. Robot design and testing for greenhouse applications[J]. Biosystems Engineering, 2006,95(3):309-321.[8] 钱录庆. 大棚温室病虫害防治新机具[J]. 山西农机,2006(3): 13.[9] 陈志青. 喷雾机器人控制系统研制[D]. 北京:中国农业大学,2002.[10] 陈艳巧. 温室型电动弥雾机的改进设计与试验分析[D].淄博:山东理工大学,2007.。
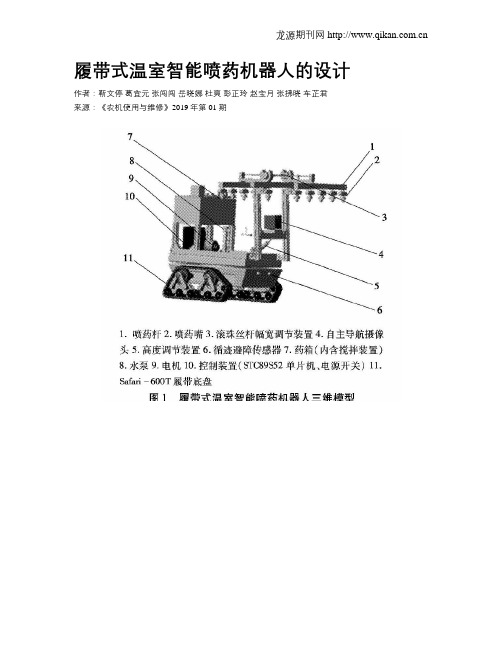
履带式温室智能喷药机器人的设计作者:靳文停葛宜元张闯闯岳晓娜杜爽彭正玲赵宝月张拂晓车芷君来源:《农机使用与维修》2019年第01期摘;要:喷药机是民用领域必备的农业装备,各国对喷药机的研发都非常重视。
智能、精准化机器能在广阔的田野上代替手工完成各种农活,世界各国农业机械都是向着全方位实现农业智能化、信息化方向发展,并努力促进高新技术的快速发展。
日本、美国、西班牙等国家智能喷药机技术相对成熟,并已广泛应用于农业。
我国的智能精准化喷药机研究起步较晚,技术水平与发达国家具有一定差距。
利用高精度喷药技术、高精度传感器技术、机电一体化技术等相结合研发的履带式温室智能喷药系统,减轻作业人员的劳动强度、改善工作环境、施药均匀、提高药盖率、减少资源浪费,对改善环境污染等有着重要的现实意义,并且将会极大地提升作物的产量,对于国民经济的发展具有重要意义。
关键词:履带式;温室;智能;喷药机中图分类号:S49;TP242;;;;;;;;文献标识码:Adoi:10.14031/ki.njwx.2019.01.0030;引言传统的喷药机效率较低,人工成本较高,人工喷药除操作人员易中毒,劳动强度大外,还存在着作物受药质量差,大型机械不适合温室作业等缺点。
随着社会进步和人们对生活质量的要求不断提高,人们对食品安全关注度也不断的提高,温室智能喷药机产业潜在市场巨大,发展前景可观。
20世纪80年代以来,“精准农业”技术的研究与应用在发达国家受到普遍地重视,“精准农业”己被国际农业科学界认为是21世纪实现农业可持续发展的先导性技术之一[1]。
2017年,美国约翰迪尔公司以3.05亿美元收购机器人初创公司蓝河科技,将利用蓝河科技的计算机视觉精准喷洒农药机器人来实现“精准农业技术”;西班牙Almeria大学针对大棚环境研制的喷雾机,通过高压喷雾器,实现雾滴在作物冠层中的高渗透率喷雾;塞维利亚大学针对大面积草坪,通过GNSS导航的路径规划实现地面自主施药的移动平台。


中国科学家首创日光温室蓄能调温技术
佚名
【期刊名称】《粮食科技与经济》
【年(卷),期】2013(000)001
【摘要】近日,中国农业科学院农业环境与可持续发展研究所研究员杨其长主持
完成的“日光温室主动蓄放热关键技术研究与应用”成果通过专家鉴定。
专家组认为,该成果是日光温室领域的重大技术突破,总体上达到国际先进水平,其中日光温室主动蓄放热方法、基于热泵的主动蓄放热系统能效提升技术达到国际领先水平。
【总页数】1页(P3-3)
【正文语种】中文
【相关文献】
1.日光温室蓄能调温技术
2.我国科学家创立日光湿室蓄能调温技术
3.中国农科院首创日光温室蓄能调温技术
4.日光温室“蓄能调温技术”为农民解难题
5.日光温室
蓄能调温技术取得重大突破
因版权原因,仅展示原文概要,查看原文内容请购买。

温室自走式自动喷雾机的研制李进海;王昱潭;杨术明;陈云;徐洋;赵泽【摘要】针对温室内空间密闭、有害气体多、湿度大和温度高等条件下,人工施药会对工作人员身体健康造成很大危害的问题,设计适用于温室的自动喷雾装置.该装置的设计主要包括移动平台的设计、自动控制装置的设计和喷雾系统的引进与优化设计.利用三维软体模拟设计,并结合实际温棚空间结构和理论分析,研制具有针对性和互换改造性的自动喷雾装备,且在实际试验后进行改进优化,满足特定温室环境下对植株无人、高效自动喷药的植保作业.在温室大棚内测试了药液在葡萄叶片上的雾滴覆盖率及沉积密度,葡萄上部、中部、下部叶片正面平均分别有77.32%、60.30%、45.75%的药液覆盖率,单位面积雾滴个数平均分别为43、33、27个/cm2,表明该装置可以达到对病虫害防治的要求.【期刊名称】《河南农业科学》【年(卷),期】2016(045)007【总页数】6页(P137-142)【关键词】温室;喷雾;自动;植保;研制【作者】李进海;王昱潭;杨术明;陈云;徐洋;赵泽【作者单位】宁夏大学机械工程学院,宁夏银川750021;宁夏大学机械工程学院,宁夏银川750021;宁夏大学机械工程学院,宁夏银川750021;宁夏大学机械工程学院,宁夏银川750021;宁夏大学机械工程学院,宁夏银川750021;宁夏大学机械工程学院,宁夏银川750021【正文语种】中文【中图分类】S491设施农业近年来在我国发展迅速,已成为农民增收的一条重要途径。
相对于传统农业,设施农业病虫害问题更加突出。
但温室内空间密闭、有害气体多、湿度大、温度高,人工施药会对工作人员的身体健康产生很大危害。
我国温室植保喷雾机械80%仍为背负式等手动喷雾器,“跑、冒、滴、漏”现象严重,农药利用率只有20%左右,同时因施药中毒人数每年都在递增。
因此研制和开发新型温室内专用施药装备,减少对作业人员健康的损害具有十分重要的意义[1-8]。
专利名称:一种自寻迹式智能喷雾车专利类型:发明专利
发明人:李淑江,吴明,窦如宏
申请号:CN201711109352.0
申请日:20171111
公开号:CN107876240A
公开日:
20180406
专利内容由知识产权出版社提供
摘要:本发明公布了一种自寻迹式智能喷雾车,包括车体、车体上的水箱,连接水箱和水泵的导管,升降装平台和喷雾发生装置,喷雾发生装置,水泵和水箱分别通过耐高压橡胶管连接在一起,车体上设置有为控制喷雾发生装置工作的控制模块、电路板和移动电源。
本发明智能化喷雾小车底盘的中心位置装有红外传感器,小车可以通过识别黑色预定轨迹沿预定轨迹运动,实现自动化作业,解放人力劳动,小车在行进过程中通过安装在喷雾发生器内的干湿传感器感应周边环境干湿度,控制模块对水泵、喷头、升降平台和旋转平台进行智能控制,小车升降平台可以根据作业要求自行调节高度,并且可以做到360°旋转,喷雾发生装置可以实现0°~60°的仰角作业,让干湿传感器能够感应到空气的干湿而自动整喷雾发生器的高度、方向和停留时间,从而有效的对空中进行喷雾加湿。
申请人:青岛科技大学
地址:266000 山东省青岛市崂山区松岭路99号
国籍:CN
代理机构:青岛中天汇智知识产权代理有限公司
代理人:郝团代
更多信息请下载全文后查看。
84电子技术Electronic Technology电子技术与软件工程Electronic Technology & Software Engineering1 引言农药喷洒在农作物生长过程中扮演着重要的角色,目前,农村多数使用背负式手(自)动喷洒器,这需要大量的劳动力,且工作效率和农药利用率偏低,对水资源和农药造成了较大的浪费。
农民在喷洒过程中如未做好防护措施或超负荷工作很有可能发生农药中毒、中暑事件,对农民的身体造成巨大的伤害,现今网络上报导出来的农民喷洒农药操作不当造成的中毒事件层出不穷。
部分地区也采用了无人机喷洒的方式,但让农民熟练的把无人机操控起来相对较难,无人机还受天气的影响,大雾天和大风天都无法起飞,而且无人机飞行需要很大的空间,在地形复杂区域和大棚内无人机的操作很不稳定,农药的喷洒效果就会很差,往往还会伴随着坠机的风险,破坏农作物和大棚。
针对以上情况,开发了一款智能农药喷洒小车,该设计基于物联网并结合BTN7971、STM32处理器,其具备智能喷洒、远程监控、信息集成、智能寻线、远程遥控等功能。
根本上解决了农民喷洒农药中毒、农药浪费、土壤污染等情况,符合农业现代化的需求。
小车功能完整,安全性高,适应能力强,而且还能通过小车的前部摄像头观察农作物的生长状态、病虫害等情况,以便及时调整农药喷洒的剂量,实现了高效率、高精度、高质量的喷洒。
1.1 系统原理设计根据不同的环境地形,研制了适应不同大小面积、各种地形多变的智能喷洒小车模型。
它采用人为遥控控制小车移动与农药喷洒。
使用STM32芯片作为总控制模块,BTM7971作为驱动模块,BT04芯片作为蓝牙遥控模块,航模锂电池供电,外加一个喷洒装置。
通过对小车的控制测试,小车用BTN7971驱动模块,双电机驱动,具有良好的动力,能够携带大量的农药溶液进行喷洒,用3500mAh 航模锂电池进行供电,可以循环充电使用,更加环保经济。
小车转向使用双电机驱动左右正反转来实现,所需转向空间较小,更能适应狭小的环境,并且使用了履带设计,能够在复杂的地形移动,并且具有减震功能,操纵简单且移动稳定。
田间智能喷药车的设计与试验研究马志凯,赵达卫,霍倩,赵晓顺,赵建国,马跃进(河北农业大学机电工程学院,河北保定071001)摘要:田间喷药存在劳动强度大、工作环境恶劣及对人体危害大等问题,为此设计了一款田间智能喷药车。
喷药车通过遥控完成田间行走、转弯和喷药作业等任务,作业速度为2km/h,转弯半径为1.72m,遥控距离为30m。
试验结果表明:喷药车完全满足小地块田间喷洒作业的要求,实用性强,具备较高的应用推广价值。
关键词:智能喷药车;树莓派;遥控喷药中图分类号:S219.89;S481文献标识码:A文章编号:1003-188X(2021)0-0259-050引言农药喷洒是农业生产工程中必不可少的环节11。
我国植保机械自动化发展缓慢,传统喷药机主要有小型背负式的喷雾器和弥雾机[2],作业效率低,经常出现农药、化肥废弃污染等现象,人工成本高,作业强度大,操作人员易中毒,对人体危害比较严重。
在国外,塞维利亚大学通过GNSS导航的路径规划设计实现了地面自主施药的移动平台⑶;美国、加拿大等国,因其土地面积较大且比较平坦,故以发展拖拉机配套的悬挂式和牵引式大型喷洒机械为主⑷。
在国内,佳木斯大学设计了一种履带式温室智能喷药机器人[5];中国农业大学设计了一种电磁诱导农用喷雾机器人路径导航系统°;山东理工大学设计了一种自动调平喷杆式喷药机[5]。
因此,果园喷雾机是当前热门研究领域:3-1]。
基于参考文献[1-1],结合国内外农业植保机械发展趋势,设计了一种基于安卓手机应用控制的田间智能喷药车,可有效提高喷药作业效率,减少劳动力,增加国内喷药机的自动化程度。
1结构组成及工作原理12总体结构组成田间智能喷药车主要由电源、控制模块、电机及收稿日期:2020-01-19基金项目:国家重点研发计划项目(241YFD4200607);河北省重点研发计划项目(19227208D);保定市科技计划项目(17NZ010)作者简介:马志凯(187-),男,河北唐县人,讲师,硕士研究生,…-nait)—cjxynzO@16.con。
收稿日期:2017-07-06基金项目:国家重点研发计划项目(2016YFD0200708)第一作者:许童羽(1967-),男,博士,教授,博士生导师,从事精准农业航空领域研究,E-mail :yatongmu@ 日光温室自主寻迹喷药车设计方法研究许童羽a ,冯帅a ,陈春玲a ,须晖b ,金彦a(沈阳农业大学a.信息与电气工程学院/辽宁省农业信息化工程技术研究中心,b.园艺学院,沈阳110161)摘要:为了解决日光温室内人工喷药对人体的危害以及耗费人力这一问题,设计出一款基于模糊PID 控制的多功能电磁寻迹日光温室喷药车。
在硬件方面,以STM32F103C8T6单片机为核心控制单元,利用电磁传感器和模糊PID 控制算法实现路径信息的识别,并制定模糊控制规则对日光温室喷药车进行精准控制,实现了日光温室喷药车在金属轨道上平稳行驶,同时单片机控制水泵实现喷药功能以及利用液位传感器实时获取剩余药量信息。
在软件方面,完成了上位机Android 移动设备程序、下位机控制程序的编写。
实现了移动终端程序能够对温室喷药车进行数据监测、行驶、喷药等控制。
在日光温室中反复测试寻迹功能、移动客户端远程控制以及喷药和数据显示等功能,测试结果表明,所开发的日光温室喷药车在小于45°和90°的导线上左右转成功率略低,只有90%~92%;在直线和45°~90°的导线上左右转成功率较高,高达100%。
喷药车寻迹成功率较高,在日光温室内能够行驶稳定,精准寻迹,基本完成了喷药车寻迹功能。
同时,在远程控制模式下能对日光温室喷药车进行前进、后退、左转、右转、加速等八个指令的控制,实现了无线远程遥控功能,并能够在移动客户端对药箱内的药量进行实时监测,满足日光温室作业需求,减少人体危害和体力劳动,达到预期目。
关键词:Android;模糊PID 控制;温室喷药车;日光温室;喷药中图分类号:S625文献标识码:A 文章编号:1000-1700(2018)04-0440-07Research on Design Method of Self Tracking Spray Vehicle in Solar GreenhouseXU Tong-yu 1,2,FENG Shuai 1,CHEN Chun-ling 1,2,XU Hui 3,JIN Yan 1(a.College of Information and Electrical Engineering/Center of Agricultural Information EngineeringTechnology of Liaoning Province;b.College of Horticulture,Shenyang Agricultural University,Shenyang 110161,China)Abstract :In order to solve the problem of human hazards and manpower consumption,a multi function electromagnetic tracing solar greenhouse spray vehicle was designed based on fuzzy PID control.In terms of hardware in this design,the STM32F103C8T6SCM was used as the core control unit,and the electromagnetic information and fuzzy PID control algorithm was combined to realize the identification of the path information.The fuzzy control rules which can accurately control the solar greenhouse sprayer were formulated to realize the sunlight greenhouse spray vehicle on the metal.Meanwhile,the single-chipmicrocomputer was used to control the water pump to realize the function of spraying the medicine and the liquid level sensor was used to obtain the remaining medicine amount information in real time.In the aspect of software in this design,the Android mobile device program and the lower computer control program of the host computer were completed.This kind of design could realize data monitoring,driving,spraying and other control of greenhouse spray vehicles in the mobile terminal program,also including the functions such as tracing function,mobile client remote control in the solar greenhouse,and testing the spraying and data display were repeatedly.After we tested,the results showed that the developed solar greenhouse spraying vehicle has a slightly lower success rate on the wires less than 45°and 90°,only 90%-92%.The success rate of turning right and left on straight lines and 45°-90°wires was as high as 100%.Moreover,the sprayer has a higher tracking success rate and could run steadily and accurately in the solar greenhouse,basically completing the tracing function of the sprayer.Furthermore,in the remote control mode,it can control the solar greenhouse spraying vehicle forward,backward,turn left,turn right,accelerate and other eight instructions.To sum up,these functions not only realized the wireless remote control function,but also enabled the mobile client to monitor the medicine in the medicine box in real time.Otherwise,these functions meet the needs of sunlight greenhouse operations,reduce human hazards and physical labor,and have achieved the desired goals.Key words :android;fuzzy PID control;greenhouse spray car;greenhouse;spray许童羽,冯帅,陈春玲,等.日光温室自主寻迹喷药车设计方法研究[J].沈阳农业大学学报,2018,49(4):440-446.沈阳农业大学学报,2018,49穴4雪:440-446Journal of Shenyang Agricultural Universityhttp :// DOI:10.3969/j.issn.1000-1700.2018.04.008许童羽等院日光温室自主寻迹喷药车设计方法研究第4期--随着计算机、电子信息和自动化控制等学科的发展,日光温室的规模、农业信息化水平和手机移动端的普及都有显著的提高。
目前,使用日光温室培育农作物,相对大田生产而言,其具有占地面积小、种植灵活和易于控制作物生长环境等优点,却能够为我国北方地区缓解冬季新鲜果蔬生产和供给这一难题,并且已经得到大范围的推广和发展温室农业[1-2]。
然而目前温室农业发展过程中也面临着一些问题,如日光温室内的农作物进行喷药施肥还是依靠人工来进行,喷药不均匀,耗费人力;采用大型机械喷药又受到日光温室自身结构的限制,无法作业等。
国内外学者在温室作业车以及模糊控制等算法上开展了大量的基础研究。
ABDESSEMED [3]介绍了自主寻迹机器人导航问题的理论发展,采用了模糊控制器处理车辆寻迹问题并提出一种基于模糊控制的新方法,所设计的模糊控制器能有效地实现机器人的运动控制问题。
刘晓邦等[4-8]通过红外光电传感器探测路径信息,运用模糊控制等算法调节舵机转角与行驶速度,实现小车转向和速度的控制,使小车能够快速稳定地寻迹。
赵寅等[9-10]以卡尔曼滤波为基本算法以及模糊控制思想提出了基于车身加速度和车轮速度信息的小车速度估算方法,增强了小车速度的精确测量。
蒋志勇[11]将机器视觉技术应用在车辆行驶控制器中。
图像信息经过控制核心处理后,识别车辆的轨道,推到出最优路径,采用模糊PID 算法对车辆的速度等进行控制,使小车行驶平稳,转向流畅,速度控制稳定。
朱里红等[12-14]为达到小车速度和转角协调控制,采用模糊PID 控制算法,通过LC 谐振电路检测感应电动势和实现舵机转动角度的控制,并通过光电编码器检测车速来控制电机转速,实现小车在路径最优、速度最快的状态下跑完全程。