8第八章图像检测技术教程
- 格式:pdf
- 大小:3.55 MB
- 文档页数:97
第八章 前照灯检测前照灯是汽车在夜间或在能见度较低的条件下,为驾驶员提供行车道路照明的重要设备,而且也是驾驶员发出警告,进行联络的灯光信号装置。
所以前照灯必须有足够的发光强度和正确的照射方向。
由于在行车过程中,汽车受到震动,可能引起前照灯部件的安装位置发生变动,从而改变光束的正确照射方向,同时,灯泡在使用过程中会逐步老化,反射镜也会受到污染而使其聚光灯性能变差,导致前照灯的亮度不足。
这些变化,都会使驾驶员对前方道路情况辨认不清,或在对面来车交会时造成对方驾驶员眩目等,从而导致事故的发生。
因此,前照灯的发光强度和光束的照射方向被列为机动车运行安全的检验项目。
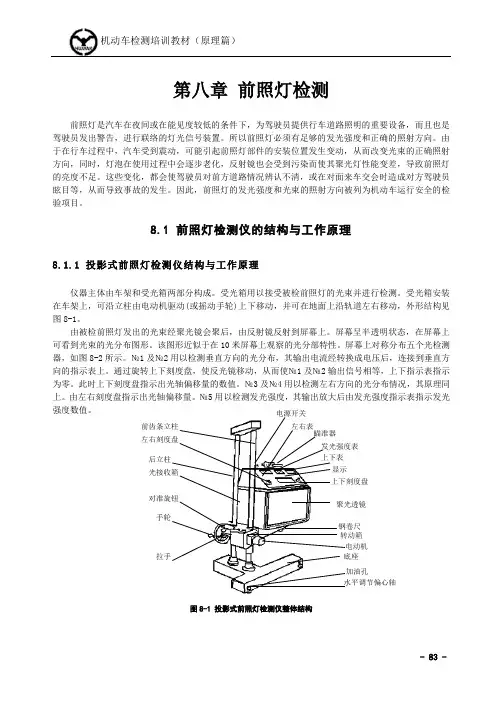
8.1 前照灯检测仪的结构与工作原理8.1.1 投影式前照灯检测仪结构与工作原理仪器主体由车架和受光箱两部分构成。
受光箱用以接受被检前照灯的光束并进行检测。
受光箱安装在车架上,可沿立柱由电动机驱动(或摇动手轮)上下移动,并可在地面上沿轨道左右移动,外形结构见图8-1。
由被检前照灯发出的光束经聚光镜会聚后,由反射镜反射到屏幕上。
屏幕呈半透明状态,在屏幕上可看到光束的光分布图形。
该图形近似于在10米屏幕上观察的光分部特性。
屏幕上对称分布五个光检测器,如图8-2所示。
№1及№2用以检测垂直方向的光分布,其输出电流经转换成电压后,连接到垂直方向的指示表上。
通过旋转上下刻度盘,使反光镜移动,从而使№1及№2输出信号相等,上下指示表指示为零。
此时上下刻度盘指示出光轴偏移量的数值。
№3及№4用以检测左右方向的光分布情况,其原理同上。
由左右刻度盘指示出光轴偏移量。
№5用以检测发光强度,其输出放大后由发光强度指示表指示发光强度数值。
图8-1 投影式前照灯检测仪整体结构电源开关左右表瞄准器发光强度表 上下表 显示 上下刻度盘 聚光透镜钢卷尺转动箱 底座加油孔水平调节偏心轴前齿条立柱 左右刻度盘 后立柱 光接收箱 对准旋钮 手轮拉手图8-2 光接受箱内部结构图和硅光电池板8.1.2 自动跟踪光轴式前照灯结构与工作原理(单测远光)仪器外形如图8-3所示。

上次课主要内容6.3 混合像元和像元分解Ø了解混合像元,并理解混合像元分解的意义;Ø传统方法的不足及其与子像元分类方法的区别;Ø理解植被覆盖度的二分模型及其计算方法;6.4 遥感图像多阶抽样估算地物面积Ø重点理解多阶抽样估算地物面积的基本思想及其计算方法;补充:目视解译方法和过程1.目视解译方法①直接判读法;②对比分析法;③地理相关分析法;补充:目视解译方法和过程1.目视解译方法:①直接判读法根据解译对象在影像中表现出来的形状和色彩等解译标志直接解译出目标类别。
如图所示,通过云层色彩和形状可以判断台风的位置和移动情况等信息。
补充:目视解译方法和过程1.目视解译方法:②对比分析法由于地物在不同时相、不同波段、不同传感器的影像中的表现形式不同(形状、色彩等解译标志的不同),可以通过比较分析这些影像解译出目标类别。
Ø通过对比多光谱遥感影像在灾害发生前后的形状和色彩,可以判读出山体滑坡的情况。
Ø通过对比火灾前后遥感影像上的色彩变化可以判读出火灾受灾程度和面积等信息。
Ø通过对比SAR影像上色彩和形状的差异可以判读出干旱受灾面积和程度。
Ø通过多波段影像上河流的形状和色彩等解译标志,可以判读出河流的属性和位置。
补充:目视解译方法和过程1.目视解译方法:②对比分析法多光谱遥感影像,台湾新竹区林区灾害前后对比补充:目视解译方法和过程1.目视解译方法:②对比分析法2006年香港大揽郊野公园火灾(左-灾前,右-灾后)补充:目视解译方法和过程1.目视解译方法:②对比分析法通过形状和色彩对比解译出干旱受灾区补充:目视解译方法和过程1.目视解译方法:②对比分析法多波段影像对比解译河流(左为绿色通道、右为近红外通道,右图黑色线条为河流)补充:目视解译方法和过程1.目视解译方法:③地理相关分析法通过地物之间的位置、大小、形状和邻接关系等信息解译目标。
计算机视觉中的图像检测技术随着计算机技术的不断发展,图像检测技术在计算机视觉领域占据着重要的地位。
图像检测技术是指利用计算机对图像进行分析和识别,识别图像中的目标并进行定位。
这一技术在人工智能、无人驾驶、安防监控等领域都有着广泛的应用,因此越来越受到人们的关注。
一、图像检测的基本原理图像检测的基本原理是利用计算机对图像进行特征提取和分析,从而识别图像中的目标。
首先,计算机会对图像进行预处理,包括去噪、边缘检测等操作,以提高图像的质量和准确度。
然后,利用图像处理算法对图像进行特征提取,找出图像中的关键特征点和区域。
最后,利用机器学习算法对提取的特征进行分类和识别,从而实现图像目标的检测和定位。
二、图像检测的技术方法图像检测技术主要包括传统方法和深度学习方法两种。
传统方法主要包括Haar特征分类器、HOG特征分类器、SIFT特征检测器等,这些方法利用图像的局部特征进行目标检测,虽然准确度较低但是速度快。
而深度学习方法则是近年来兴起的一种新技术,利用卷积神经网络进行特征提取和图像分类,由于能够自动学习图像的特征和规律,因此在图像检测技术中表现出了极高的准确度和稳定性。
三、图像检测的应用领域图像检测技术在各个领域都有着广泛的应用。
在人工智能领域,图像检测技术被用于人脸识别、物体识别、场景理解等方面,为智能机器人、智能监控系统等提供了重要支持。
在无人驾驶领域,图像检测技术可以用于车辆和行人的检测识别,帮助自动驾驶系统做出正确的决策。
在安防监控领域,图像检测技术可以用于监控摄像头的行人检测、交通流量统计等,提高了监控系统的准确性和效率。
四、图像检测的挑战和未来发展图像检测技术虽然取得了很大的进展,但仍然面临着一些挑战。
首先,对于复杂场景和光照条件的适应性还不足,导致检测的准确度有待提高。
其次,对于小目标和遮挡目标的检测能力有限,需要进一步加强。
未来,随着深度学习技术的不断发展和算法的不断优化,图像检测技术将迎来更大的突破和发展。
第8章 图象的检测及模板匹配图象的分割与检测(识别)实际上是一项非常困难的工作。
很难说清楚为什么图象应该分割成这样而不是那样。
人类的视觉系统是非常优越的,它不仅包含了双眼,还包括了大脑,可以从很复杂的景物中分开并识别每个物体,甚至可以毫不费力地跟上每秒好几十帧变化的图象。
举两个例子来说明一下人类视觉系统的优越性。
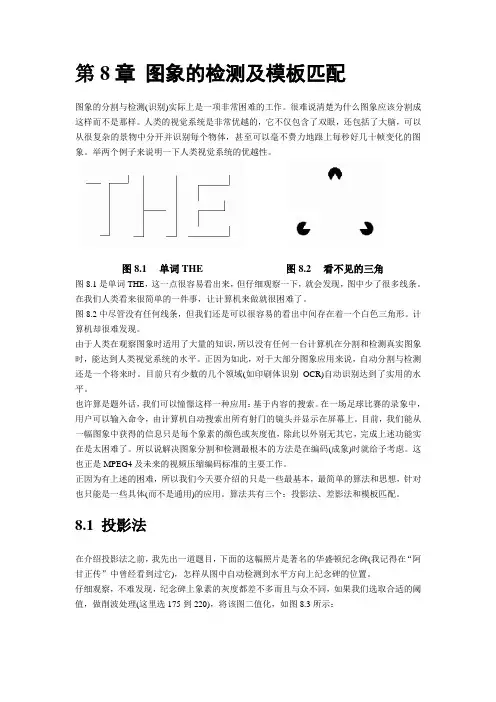
图8.1 单词THE图8.2 看不见的三角 图8.1是单词THE ,这一点很容易看出来,但仔细观察一下,就会发现,图中少了很多线条。
在我们人类看来很简单的一件事,让计算机来做就很困难了。
图8.2中尽管没有任何线条,但我们还是可以很容易的看出中间存在着一个白色三角形。
计算机却很难发现。
由于人类在观察图象时适用了大量的知识,所以没有任何一台计算机在分割和检测真实图象时,能达到人类视觉系统的水平。
正因为如此,对于大部分图象应用来说,自动分割与检测还是一个将来时。
目前只有少数的几个领域(如印刷体识别OCR)自动识别达到了实用的水平。
也许算是题外话,我们可以憧憬这样一种应用:基于内容的搜索。
在一场足球比赛的录象中,用户可以输入命令,由计算机自动搜索出所有射门的镜头并显示在屏幕上。
目前,我们能从一幅图象中获得的信息只是每个象素的颜色或灰度值,除此以外别无其它,完成上述功能实在是太困难了。
所以说解决图象分割和检测最根本的方法是在编码(成象)时就给予考虑。
这也正是MPEG4及未来的视频压缩编码标准的主要工作。
正因为有上述的困难,所以我们今天要介绍的只是一些最基本,最简单的算法和思想,针对也只能是一些具体(而不是通用)的应用。
算法共有三个:投影法、差影法和模板匹配。
8.1 投影法在介绍投影法之前,我先出一道题目,下面的这幅照片是著名的华盛顿纪念碑(我记得在“阿甘正传”中曾经看到过它),怎样从图中自动检测到水平方向上纪念碑的位置。
仔细观察,不难发现,纪念碑上象素的灰度都差不多而且与众不同,如果我们选取合适的阈值,做削波处理(这里选175到220),将该图二值化,如图8.3所示:图8.3 华盛顿纪念碑图8.4 削波处理,将图8.3二值化 由于纪念碑所在的那几列的白色点比起其他列多很多,如果把该图在垂直方向做投影,如图8.5所示。
计算机视觉中的图像检测技巧随着人工智能技术的不断发展,计算机视觉技术在图像处理领域取得了显著的进展。
图像检测作为计算机视觉的重要应用之一,对于识别图像中的物体和场景起到了至关重要的作用。
本文将探讨计算机视觉中的图像检测技巧,包括常见的检测算法、模型训练和优化等内容。
一、图像检测算法1. 基于传统机器学习的图像检测算法传统的图像检测算法主要包括Haar特征检测、HOG特征检测和SIFT特征检测等。
这些算法通过提取图像中的特征并使用机器学习模型进行训练,来实现对目标物体的检测。
虽然这些算法在一定程度上能够实现图像检测的功能,但是在处理复杂场景和大尺寸图像时表现不佳。
2. 基于深度学习的图像检测算法随着深度学习技术的兴起,基于深度学习的图像检测算法如YOLO、Faster R-CNN和SSD等开始成为主流。
这些算法通过构建卷积神经网络来提取图像特征,并使用目标检测模型对物体进行定位和识别。
相比传统算法,基于深度学习的图像检测算法在准确性和处理速度上都有了显著的提升。
二、模型训练与优化1. 数据准备在进行图像检测模型训练之前,需要准备大量的标注数据集。
数据集的质量和多样性对于模型的性能和泛化能力具有重要影响。
此外,数据增强技术也可以通过对原始数据进行旋转、缩放和平移等操作,来扩充数据集,提升模型的鲁棒性。
2. 模型训练在模型训练阶段,需要选择合适的损失函数和优化器,对模型进行迭代训练。
同时,为了提高训练效率和模型性能,可以使用预训练模型进行迁移学习,将已经在大规模数据集上训练好的模型参数作为初始化参数,对目标数据集进行微调。
3. 模型优化对于图像检测模型的优化,可以采用一些技巧来提高模型的性能。
比如使用不同的网络结构、调整超参数、应用正则化技术和使用集成学习等方法,来提升模型的准确性和泛化能力。
三、应用场景和发展趋势1. 应用场景图像检测技术在各个领域都有着广泛的应用,如智能安防、自动驾驶、医疗影像、工业质检等。