51单片机接口(并口串口)10
- 格式:ppt
- 大小:688.50 KB
- 文档页数:93
MCS-51P端口知识1 引言MSC—51是70年代末的产品,目前出现了很多功能更强大的单片机,但在目前市场上的产品中MSC—51仍占单片机的多半产品,且MCS—51是其他单片机的基础。
本文将详细讨论MSC—51的并行接口,目的是为单片机的使用者提供更好的理论依据。
2 MSC—51的并行I/O端口2.1 I/O端口简介I/O端口又称为I/O接口或I/O通路,是MSC—51单片机对外部实现控制和信息交换的必经之路,是一个过渡的大规模集成电路,用于信息传递过程中的速度匹配和增强单片机的负载能力。
I/O 端口可以实现和不同外设的速度匹配,以提高CPU的工作效率,可以改变数据的传送方式,如:内部并行总线与外部设备串行数据传送的转换。
2.2 MSC—51各并行I/O的组成I/O端口分为串行口和并行口。
串行I/O端口一次只能传送一位二进制信息;并行I/O端口一次可传送一个字节的数据。
MSC—51单片机有四个并行端口,分别命名为P0、P1、P2、P3,每个端口都有八条端口线,用于传送数据或地址信息。
由于每个端口的结构各不相同,因此它们在功能和用途上差别颇大。
每个I/O端口都由一个八位数据锁存器和一个八位数据缓冲器组成,其中八位数据锁存器的端口与P0、P1、P2、P3同名,属于21个特殊功能寄存器中的4个,对应内部RAM地址分别为80H、90H、A0H、B0H。
需要输出数据时,8个数据锁存器用于对端口引脚上输入数据进行锁存。
需要输入数据时,8个数据缓冲器用于对端口引脚上输入数据进行缓冲。
另外访问并行I/O端口除了可以用字节地址访问外,还可以进行按位寻址。
3 P0综述3.1 P0口功能P0.7—P0.0为P0所用。
P0口的访问地址是80H,位地址范围是80H—87H。
由于P0口具有较大的负载能力,最多可推动8个TTL门,因此是真正的双向I/O口。
一般来说,P0口具有两种功能:第一,P0口可以作为通用I/O接口使用,P0.7—P0.0用于传送CPU的输入/输出数据。
51单片机结构功能51单片机是指基于Intel的8051微处理器为核心的单片机,其结构功能丰富,被广泛应用于各种嵌入式系统。
一、结构51单片机采用冯·诺依曼结构,具有指令存储器和数据存储器,其中程序存储器(ROM)用于存储程序和表格数据,而数据存储器(RAM)用于存储可变数据。
51单片机还具有特殊功能寄存器(SFR),这些寄存器专门用于控制和设置单片机的各种功能。
二、功能1、运算功能:51单片机具有8位运算器,可以进行算术、逻辑和位运算。
2、控制功能:51单片机具有丰富的控制指令,可以实现如条件转移、跳转、中断等功能,还可以进行定时器和计数器的控制。
3、通信功能:51单片机可以通过串行口实现串行通信,也可以通过并行口实现并行通信。
4、存储功能:51单片机内部具有少量的RAM和ROM存储器,同时还可以外接扩展存储器。
5、定时/计数功能:51单片机内部具有定时器和计数器,可以实现定时和计数的功能。
6、中断功能:51单片机具有多个中断源,可以实现多级中断控制。
7、输入/输出功能:51单片机具有多个输入/输出端口,可以实现多种输入/输出控制。
51单片机以其结构紧凑、功能丰富、易于使用等特点,被广泛应用于工业控制、智能家居、消费电子等领域。
C51单片机寄存器功能湖山网络广播系统设计方案一、概述随着科技的发展和数字化的普及,网络广播系统在各种场所扮演着越来越重要的角色。
湖山网络广播系统设计方案旨在满足湖山地区对高质量、高效的网络广播系统的需求。
该方案旨在构建一个稳定、可靠、易用的网络广播系统,以满足湖山地区在公共广播、紧急通知、日常资讯等方面的需求。
二、系统需求分析1、稳定性:系统应具备高度的稳定性,能够保证长时间的连续运行,避免因设备故障或网络问题导致的广播中断。
2、可靠性:系统应具备可靠的备份机制,确保在主设备出现问题时,备份设备能够迅速接管,保证广播的连续性。
3、易用性:系统应具备良好的用户界面,操作简单易懂,方便管理员进行配置和管理。

华中科技大学光学与电子信息学院单片机( 2015 -- 2016学年度第一学期)题目:MCS-51单片机并行端口结构与操作院系:光学与电子信息学院班级:学号:学生姓名:指导教师:成绩:日期: 2015年 9月 21日MCS—51单片机并行口的结构与操作一、MCS—51单片机简介MCS—51单片机是美国INTE公司于1980年推出的产品,与MCS-48单片机相比,它的结构更先进,功能更强,在原来的基础上增加了更多的电路单元和指令,指令数达111条,MCS-51单片机可以算是相当成功的产品,一直到现在,MCS-51系列或其兼容的单片机仍是应用的主流产品,各高校及专业学校的培训教材仍与MCS—51单片机作为代表进行理论基础学习.MCS-51系列单片机主要包括8031、8051和8751等通用产品,其主要功能如下:8位CPU、4kbytes 程序存储器(ROM)、128bytes的数据存储器(RAM)、32条I/O口线、111条指令,大部分为单字节指令、21个专用寄存器、2个可编程定时/计数器、5个中断源,2个优先级、一个全双工串行通信口、外部数据存储器寻址空间为64kB、外部程序存储器寻址空间为64kB、逻辑操作位寻址功能、双列直插40PinDIP封装、单一+5V电源供电。
如图所示:1。
结构(1)中央处理单元(8位)数据处理、测试位,置位,复位位操作(2)只读存储器(4KB或8KB)永久性存储应用程序,掩模ROM、EPROM、EEPROM(3)随机存取内存(128B、128B SFR)在程序运行时存储工作变量和资料(4)并行输入/输出口(I / O)(32条)作系统总线、扩展外存、I / O接口芯片(5)串行输入/输出口(2条)串行通信、扩展I / O接口芯片(6)定时/计数器(16位、加1计数)计满溢出、中断标志置位、向CPU提出中断请求,与CPU之间独立工作(7)时钟电路内振、外振。
(8)中断系统五个中断源、2级优先。
51单片机的基本结构51单片机是一种高性能、低功耗的微控制器,是嵌入式系统中常用的一种芯片。
它具有集成度高、易编程、可编程性强等特点,在各种电子设备中广泛应用,包括家电、工业控制、汽车电子、智能仪器等领域。
51单片机的基本结构主要包括CPU、存储器、输入输出端口、定时计数器和串口通信等部分。
1.CPU51单片机的CPU是其核心部分,负责执行指令、进行运算处理。
它通常采用哈佛结构,即指令和数据分开存储。
51单片机的CPU主要由ALU (算术逻辑单元)、寄存器组、指令寄存器、程序计数器等部分组成,能够完成基本的运算和控制功能。
2.存储器51单片机的存储器包括ROM(只读存储器)和RAM(随机存储器)。
ROM用于存储程序代码和常量数据,是只读的;RAM用于存储变量数据和临时结果,是可读写的。
在51单片机中,通常ROM用于存储程序代码和初始化数据,RAM用于存储运行时数据和临时结果。
3.输入输出端口51单片机的输入输出端口用于与外部设备进行数据交换。
它可以通过不同的接口与外部设备连接,比如并行口、串行口、通用输入输出口等。
通过输入输出端口,51单片机可以与外部设备进行数据传输和通信,实现各种功能。
4.定时计数器51单片机的定时计数器可以用于计时和计数,通常用于控制时序和频率。
在51单片机中,定时计数器可以生成各种定时中断,实现定时控制功能。
定时计数器可以根据需要设定不同的时钟源和计数模式,实现灵活的定时控制。
5.串口通信51单片机的串口通信功能可以用于与外部设备进行串行通信,比如与PC机、外围设备等进行数据传输。
串口通信包括串行口和UART(通用异步收发器),可以通过串行口进行双向数据传输。
串口通信在51单片机中广泛应用于各种通信设备和控制系统中。
总的来说,51单片机的基本结构包括CPU、存储器、输入输出端口、定时计数器和串口通信等部分,通过这些部分的组合和协作,可以实现各种功能和应用。
在实际应用中,设计人员可以根据需要对这些部分进行配置和扩展,实现更丰富的功能和性能要求。
51单片机并行口驱动LED数码管显示电路及程序
介绍利用51单片机的一个并行口实现多个LED数码管显示的方法,给出了利用此方法设计的多路LED显示系统的硬件电路结构原理图和软件程序流程,同时给出了采用51汇编语言编写程序。
1 硬件电路
多位LED显示时,常将所有位的段选线并联在一起,由一个8位I/O口控制,而共阴极点或共阳极点分别由另一个8位I/O口控制;也可采用并行扩展口构成显示电路,通常,需要扩展器件管脚的较多,价格较高。
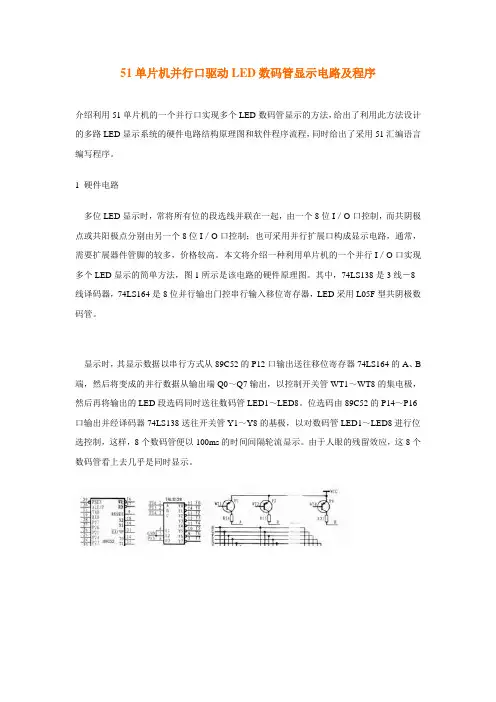
本文将介绍一种利用单片机的一个并行I/O口实现多个LED显示的简单方法,图1所示是该电路的硬件原理图。
其中,74LS138是3线-8线译码器,74LS164是8位并行输出门控串行输入移位寄存器,LED采用L05F型共阴极数码管。
显示时,其显示数据以串行方式从89C52的P12口输出送往移位寄存器74LS164的A、B 端,然后将变成的并行数据从输出端Q0~Q7输出,以控制开关管WT1~WT8的集电极,然后再将输出的LED段选码同时送往数码管LED1~LED8。
位选码由89C52的P14~P16口输出并经译码器74LS138送往开关管Y1~Y8的基极,以对数码管LED1~LED8进行位选控制,这样,8个数码管便以100ms的时间间隔轮流显示。
由于人眼的残留效应,这8个数码管看上去几乎是同时显示。
<51单片机并行口驱动LED数码管显示电路>
2 软件编程
该系统的软件编程采用MCS-51系列单片机汇编语言完成,并把显示程序作为一个子程序,从而使主程序对其进行方便的调用。
图2所示是其流程图。
具体的程序代码如下:
<51单片机并行口驱动LED数码管显示程序>。
51单片机串口通信程序51单片机是我国自主研发的一款微控制器,在国内广泛应用于各种电子设备中。
在很多应用场景中,需要通过串口进行通信,以实现数据传输。
本文将介绍51单片机串口通信程序的编写方法。
一、串口介绍串口是一种通信接口,用于在电子设备之间传输数据。
其主要特点是一条通信线路同时只能传输一位数据,因此称为串口。
串口和并口属于不同的通信接口标准。
串口的优点是具有通信距离远、传输速率快、可靠性高等优点,因此广泛应用于各种场合中。
串口有两种工作模式:同步模式和异步模式。
在实际应用中,异步串口通信更为常见。
二、异步串口通信原理在异步串口通信中,数据的传输是通过发送端和接收端的时钟信号不同步实现的。
在发送数据时,发送端会发出一个起始位,接下来是数据位,最后是一个或多个停止位。
在接收端,当检测到起始位时,开始接收数据。
根据通信协议,在接收完数据位后,接收端会判断是否正确,然后再结束本次通信。
1. 硬件连接在51单片机和电脑之间进行串口通信,需要用到串口转USB线。
将串口转USB线的TxD接口与51单片机的P3.1接口相连,RxD接口与P3.0接口相连。
此外,需要一个5V的电源供给51单片机。
2. 准备工作在编写程序之前,需要进行一些准备工作:(1)将P3口设为外部中断P3口的最低2位是外部中断的2个输入端,需要将它们设为中断输入。
EA=1;EX0=1;(2)设置波特率串口通信需要设置波特率。
常见的波特率有9600、19200、38400等。
对应的波特率常数为0xFD、0xFA、0xF4等。
TH1=0xFD;//波特率9600(3)使能串口中断在发送和接收数据时,会不断产生中断,需要将中断使能。
ES=1;//允许串口中断3. 编写程序(1)发送数据void SendData(unsigned char SendBuff[],unsigned int ULength){unsigned int i;for(i=0;i<ULength;i++){SBUF=SendBuff[i];//发送数据while(TI==0); //等待,直到发送完成TI=0;}}(2)接收数据(3)主函数TMOD|=0x20;//定时器1工作方式2TH1=0xFD;//波特率9600TR1=1;//打开定时器1SCON=0x50;//串口方式1,8位数据,无校验,1停止位EA=1;//开总中断ES=1;//开串口中断while(1){SendData(pSendData,4);//发送数据 RecvData(pRecvData,4);//接收数据if(pRecvData[0]=='K'){P0=0x01;//点亮LED}else{P0=0x00;//关闭LED}}}四、总结。
51单片机串口原理
51单片机串口原理是指通过串行通信协议实现数据的发送与
接收的一种通信方式。
串口通信可以用于串联外部设备与单片机进行数据传输,如与计算机、传感器、模块等进行数据交互。
串口通信由发送端与接收端组成。
发送端将要发送的数据转换成串行数据流,通过串行引脚将数据发送到接收端。
接收端接收到串行数据流后,将其转换为并行数据并进行相应的处理。
51单片机的串口通信主要依靠两个寄存器:TBUF(发送缓冲器)和RBUF(接收缓冲器)。
发送端通过向TBUF写入数据
实现数据发送,接收端通过读取RBUF来获取接收到的数据。
串口通信的波特率是指每秒钟传送的位数,它是串口通信中十分重要的参数。
串口通信的波特率由波特发明,并以其名字命名。
常见的波特率有9600、38400、115200等。
串口通信使用的是异步串行通信,即数据以比特为单位依次传送。
在每个数据字节的前后,都有一个起始位和一个或多个停止位。
起始位用于通知接收端数据的到来,停止位用于标记数据的结束。
在51单片机中,通过设置相应的寄存器来配置串口的波特率、数据位数、停止位数和校验位。
通过配置串口通信的参数,可以实现不同设备之间的数据传输。
以上就是51单片机串口通信的基本原理,通过串口通信可以
实现单片机与外部设备之间的数据交互,为嵌入式系统的开发提供了方便和灵活性。
51单片机的串口双机通讯一、什么是串口串口是串行发送数据的接口,是相对于并口来说的,是一个广泛的定义。
本期我们说的串口指的是指UART或是RS232。
二、什么是波特率波特率是指串行端口每秒内可以传输的波特位数。
这里所指的波特率,如标准9600不是每秒种可以传送9600个字节,而是指每秒可以传送9600个二进位。
一个字节需要8个二进位,如用串口模式1来传输,那么加上起始位和停止位,每个数据字节就要占用10个二进位。
9600bps用模式1传输时,每秒传输的字节数是9600÷10=960个字节,发送一个字节大概需要1ms时间。
三、51单片机串口相关寄存器1、SCON串口控制寄存器(1)SM0和SM1:方式选择寄存器SM0 SM1 工作方式功能波特率0 0 方式0 8位同步移位寄存器晶振频率/ 120 1 方式1 10位UART 可变1 0 方式2 11位UART 晶振频率/32或晶振频率/64 1 1 方式3 11位UART 可变多机通信是工作在方式2和方式3的,所以SM2主要用于方式2和方式3,多级通信时,SM2=1,当SM2=1时,只有当接收到的数据帧第9位(RB8)为1时,单片机才把前八位数据放入自己的SBUF中,否则,将丢弃数据帧。
当SM2=0时,不论RB8的值是什么,都会把串口收到的数据放到SBUF中。
(3)REN:允许接收位REN用于控制是否允许接收数据,REN=1时,允许接收数据,REN=0时,拒绝接收数据。
(4)TB8:要发送的第9位数据位在方式2和方式3中,TB8是要作为数据帧第9位被发送出去的,在多机通信中,可用于判断当前数据帧的数据是地址还是数据,TB8=0为数据,TB8=1为地址。
(5)RB8:接收到的第9位数据位当单片机已经接收一帧数据帧时,会把数据帧中的第9位放到RB8中。
方式0不使用RB8,在方式2和方式3中,RB8为接收到的数据帧的第9位数据位。
(6)TI:发送中断标志位方式0中,不用管他。
51单片机的基本结构及其主要组成部分51单片机是一种非常常见的嵌入式微控制器芯片,其被广泛应用于各种电子设备中。
其基本结构及其主要组成部分既是设计开发嵌入式系统的基础,也是学习51单片机的关键。
一、51单片机基本结构51单片机的基本结构主要包括存储器、CPU、输入输出接口以及时钟电路四个部分。
1. 存储器存储器是51单片机系统的一个重要组成部分。
其中包括的存储器主要有ROM、RAM和EEPROM,ROM用来存储程序代码,RAM用来存储变量和中间结果,EEPROM则可实现数据的存储。
2. CPUCPU是整个51单片机系统的核心部分,其主要功能是执行指令,负责程序的控制和各种数据的处理。
在51单片机中,CPU主要通过时钟信号不断地获取并执行程序指令。
3. 输入输出接口输入输出接口是将51单片机与外界连接的一个重要部分,也是实现嵌入式系统功能的关键。
其中包括并口、串口、SPI接口、I2C接口等等,用于处理外设的输入和输出信号。
4. 时钟电路51单片机的时钟电路用来提供时钟信号给CPU,并且用于控制各种外围设备和CPU执行指令的同步。
二、51单片机主要组成部分1. 程序存储器程序存储器是指ROM,其存储了单片机的程序代码。
在51单片机中,程序存储器可以分为两种类型:OTP(一次可编程)ROM和Flash ROM (可被反复擦写)。
在OTP ROM中,编程后的程序无法修改,而Flash ROM则可被反复擦写。
2. 数据存储器数据存储器是指RAM和EEPROM,用来存储程序中的变量和中间结果。
其中RAM用来存储临时数据,EEPROM则用于数据的存储,这些数据在掉电情况下也不会丢失。
3. 中央处理器中央处理器(CPU)是单片机最核心的部分,它负责执行程序中的指令并且控制其它硬件设备的工作。
4. 输入输出接口输入输出接口是将单片机与外部设备相互连接的途径。
在这些接口中,包括并口、串口、SPI、I2C等。
这些接口是为特定的设备开发的,包括LCD显示器、键盘及调制解调器等。
51单片机串口变并口汇编程序51单片机是一种常用的微控制器,它具有高性能、低功耗、丰富的外设和广泛的应用领域。
其中,串口和并口是常见的通信接口方式。
本文将详细介绍51单片机串口变并口汇编程序的实现方法。
## 1. 串口和并口介绍### 1.1 串口串行通信接口(Serial Communication Interface),简称串口,是一种将数据以连续位的形式传输的通信方式。
它只需要两根线(发送线和接收线)即可实现数据传输,适用于远距离传输和多设备连接。
### 1.2 并口并行通信接口(Parallel Communication Interface),简称并口,是一种将数据以多个位同时传输的通信方式。
它需要多根线同时传输数据,适用于高速数据传输和短距离连接。
## 2. 串行通信与并行通信转换原理在51单片机中,通过软件编程可以实现串行通信与并行通信之间的转换。
下面是其基本原理:### 2.1 串行转并行在将串行数据转换为并行数据时,需要一个移位寄存器来存储接收到的串行数据,并通过时钟信号按位移出到并行总线上。
具体步骤如下:1. 初始化串口参数,包括波特率、数据位、停止位等。
2. 等待串口接收到数据。
3. 将接收到的串行数据写入移位寄存器。
4. 通过时钟信号依次将移位寄存器中的数据按位移出到并行总线上。
### 2.2 并行转串行在将并行数据转换为串行数据时,需要一个移位寄存器来存储要发送的并行数据,并通过时钟信号按位读取并发送出去。
具体步骤如下:1. 初始化串口参数,包括波特率、数据位、停止位等。
2. 将要发送的并行数据写入移位寄存器。
3. 通过时钟信号依次从移位寄存器中读取数据,并发送出去。
## 3. 51单片机串口变并口汇编程序实现下面是一个示例程序,演示了如何在51单片机中实现串口变并口的功能。
```assembly; 定义串口接收和发送函数USART_Rx: ; 串口接收函数MOV A, SBUF ; 读取SBUF中的接收数据RETUSART_Tx: ; 串口发送函数MOV SBUF, A ; 将A寄存器中的数据写入SBUFRET; 主程序入口MAIN:MOV TMOD, #20H ; 设置定时器1为工作模式2,用于串口通信 MOV TH1, #FDH ; 设置波特率为9600SETB TR1 ; 启动定时器1; 初始化串口参数MOV SCON, #50H ; 设置串口工作模式为8位数据位、1位停止位、可变波特率; 接收数据并转换为并行数据发送CALL USART_Rx ; 调用串口接收函数,将接收到的数据存入A寄存器MOV P0, A ; 将A寄存器中的数据写入P0,并行总线; 并行数据转换为串行数据发送MOV A, P1 ; 从P1并行总线读取要发送的数据,存入A寄存器CALL USART_Tx ; 调用串口发送函数,将A寄存器中的数据发送出去SJMP MAIN ; 无限循环END```上述汇编程序通过调用USART_Rx和USART_Tx函数实现了串口接收和发送功能。