三相异步电动机反接制动PPT
- 格式:ppt
- 大小:2.04 MB
- 文档页数:18


三相异步电动机的制动控制-反接制动反接制动是通过改变电动机定子绕组三相电源的相序,产生一个与转子惯性转动方向相反的旋转磁场,因而产生制动转矩。
反接制动时,转子与定子旋转磁场的相对转速接近电动机同步转速的两倍,所以定子绕组中流过的反接制动电流相当于全压直接启动时的两倍,因此反接制动转矩大,制动迅速。
为了减小冲击电流,通常在电动机定子绕组中串接制动电阻。
另外,当电动机转速接近零时,要及时切断反相序电源,以防电动机反方向启动,通常用速度继电器来检测电动机转速并控制电动机反相序电源的断开。
1.单向运行反接制动下图所示为单向运行反接制动控制线路,接触器 KM 控制接触器单向运行,接触器KM2为反接制动,KS为速度继电器,R为反接制动电阻。
工作过程:接通开关QS,按下启动按钮SB2,接触器KM1通电,电动机M启动运行,速度继电器KS常开触头闭合,为制动作准备。
制动时按下停止按钮SB1,KM1断电,KM2通电(KS常开触头未打开),KM2主触头闭合,定子绕组串入限流电阻R进行反接制动,当M的转速接近0时,KS常开触头断开,KM2断电,电动机制动结束。
2.可逆运行反接制动控制线路下图所示为可逆运行反接制动控制线路,KM1为正转接触器,KM2为反转接触器, KM3为短接电阻接触器,KA1、KA2、KA3为中间继电器,KS1为正转常开触头,KS2为反转常开触头,R为启动与制动电阻。
电动机正向启动和停车反接制动过程如下。
(1)正向启动时,接通开关QS,按下启动按钮SB2,KM1通电自锁,定子串入电阻R正向启动,当正向转速大于120r/min时,KS1闭合,因KM1的常开辅助触点已闭合,所以KM3通电将R短接,从而使电动机在全压下运转。
(2)停止运行时,按下停止按钮 SB1,接触器 KM1、KM3 相继失电,定子切断正序电源并串入电阻R,SB1的常开触头后闭合,KA3通电,常闭触点又再次切断KM3电路。
由于惯性,KS1仍闭合,且KA3(18-10)已闭合,使KA1通电,触点KA1(3-12)闭合,KM2通电,电动机定子串入R进行反接制动;KA1的另一触点(3-19)闭合,使KA3仍通电,确保KM3始终处于断电状态,R始终串入M的定子绕组。
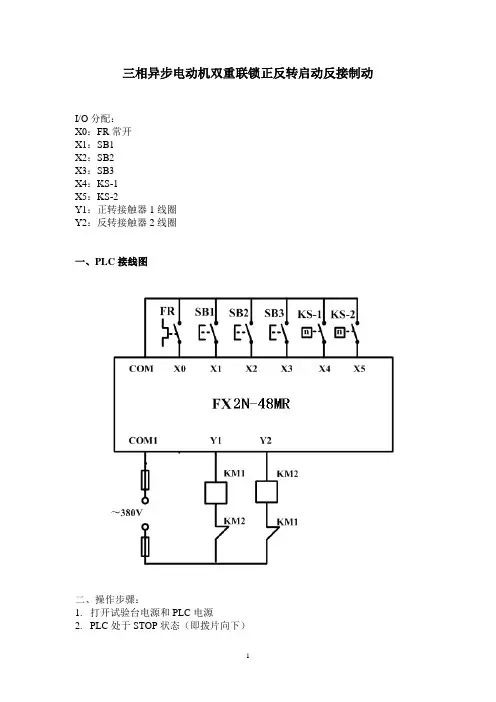
三相异步电动机双重联锁正反转启动反接制动I/O分配:
X0:FR常开
X1:SB1
X2:SB2
X3:SB3
X4:KS-1
X5:KS-2
Y1:正转接触器1线圈
Y2:反转接触器2线圈
一、PLC接线图
二、操作步骤:
1.打开试验台电源和PLC电源
2.PLC处于STOP状态(即拨片向下)
3.打开编程软件FXGPWIN→新文件→PLC类型设置→FX2N
4.画梯形图→转换→保存(文件名及路径不宜用中文,文件名最好以字母
开头,可带上数字;因为C盘有还原,所以文件一定要保存在D盘;文件题头名可随意填)
5.PLC→端口设置(若数据线接在电脑主机后面的上方则选COM1
若数据线接在电脑主机后面的下方则选COM2)PLC→传送→写出→范围设置(范围可在指令表里查)
6.PLC处于RUN状态(即拨片向上),电脑关机
7.接主电路图和PLC接线图,接完线后通电,按控制按钮
因为有些同学接错线导致跳闸,所以最好是先把程序传到PLC,再把电脑关闭,以免损坏电脑。
三、PLC梯形图
按钮顺序
正转→停止:
X2(SB2)→X5 (KS-2) →X1(SB1)→X5 (KS-2)
正转启动通停止断
反转→停止:
X3(SB3)→X4 (KS-1) →X1(SB1)→X4 (KS-1)
反转启动通停止断。
教学设计
教学过程
教学环节教师讲授、指导(主导)内容
学生学习、
操作(主体)活动
时间
分配
一、二、组织教学 (师生问候)
教师确保设备已经调好,学生能够听见声音
新授知识
新课引入
一、实验目的
1、通过对接触器正、反转联锁控制线路的安装接线,掌握根
据原理图安装接线的方法;
2、掌握三相异步电机正、反转的工作原理
二、实验步骤
电路图
师生问好
作业设计:
用三个按钮控制一台电动机的启动停止,当按下绿色按钮时电动机正传,按下红色按钮时电动机停止。
再按下黑色按钮时电动机反转,按下红色按钮时电动机停止。
布置作业
完成习题册布置作业
三、。
三相异步电动机的制动控制原理制动:就是给电动机一个与转动方向相反的转矩使它迅速停转(或限制其转速)。
制动的方法一般有两类:机械制动和电气制动。
机械制动:利用机械装置使电动机断开电源后迅速停转的方法叫机械制动。
机械制动常用的方法有:电磁抱闸和电磁离合器制动。
电气制动:电动机产生一个和转子转速方向相反的电磁转矩,使电动机的转速迅速下降。
三相交流异步电动机常用的电气制动方法有能耗制动、反接制动和回馈制动。
一、反接制动1.反接制动的方法异步电动机反接制动有两种,一种是在负载转矩作用下使电动机反转的倒拉反转反接制动,这种方法不能准确停车。
另一种是依靠改变三相异步电动机定子绕组中三相电源的相序产生制动力矩,迫使电动机迅速停转的方法。
反接制动的优点是:制动力强,制动迅速。
缺点是:制动准确性差,制动过程中冲击强烈,易损坏传动零件,制动能量消耗大,不宜经常制动。
因此反接制动一般适用于制动要求迅速、系统惯性较大,不经常启动与制动的场合。
2.速度继电器(文字符号KS)速度继电器是依靠速度大小使继电器动作与否的信号,配合接触器实现对电动机的反接制动,故速度继电器又称为反接制动继电器。
感应式速度继电器是靠电磁感应原理实现触头动作的。
从结构上看,与交流电机类似,速度继电器主要由定子、转子和触头三部分组成。
定子的结构与笼型异步电动机相似,是一个笼型空心圆环,有硅钢片冲压而成,并装有笼型绕组。
转子是一个圆柱形永久磁铁。
速度继电器的结构原理图速度继电器的符号速度继电器的轴与电动机的轴相连接。
转子固定在轴上,定子与轴同心。
当电动机转动时,速度继电器的转子随之转动,绕组切割磁场产生感应电动势和电流,此电流和永久磁铁的磁场作用产生转矩,使定子向轴的转动方向偏摆,通过定子柄拨动触头,使常闭触头断开、常开触头闭合。
当电动机转速下降到接近零时,转矩减小,定子柄在弹簧力的作用下恢复原位,触头也复原。
常用的感应式速度继电器有JY1和JFZ0系列。