现代控制理论课程复习要点
- 格式:docx
- 大小:36.52 KB
- 文档页数:3
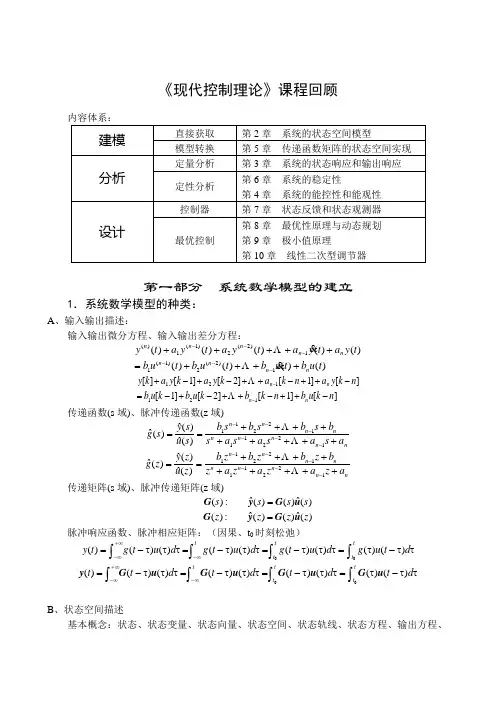
现代控制理论复习要点第二章控制系统的状态空间描述小结一、建模:状态空间描述(现代控制:内部描述)1、对象:① 线性时不变系统;② 离散时间系统;③ 时变系统;④ 非线性系统。
2、模型形式(状态空间表达式):① 一阶微分方程组(一阶差分方程组);② 向量-矩阵形式;③ 系统方框图;④ 状态变量图。
3.方法(途径):①(已知)系统机理→(求)状态空间表达式;②(已知)输入输出描述(经典控制:外部描述)→实现问题(求)状态空间表达式(现代控制:内部描述)a 、(已知)方块图→(求)状态空间表达式;方块图→无零点惯性环节有零点惯性环节二阶振荡环节状态变量图→将积分器的输出作为状态变量状态空间描述b 、(已知)传递函数阵/高阶微分方程(脉冲传递函数阵/高阶差分方程)→(求)状态空间表达式))a b 无零点实现:能控标准型、能观标准型直接分解法:能控标准型、能观标准型最小实现有零点实现串联分解法(串联实现)并联分解法(并联实现或约旦标准型实现):无重极点;有重极点二、状态变量的线性变换1、系统状态空间表达式的非唯一性2、系统的不变性① 特征值不变性/特征多项式系数(特征方程)不变性;② 传递函数矩阵不变性;③ 系统的能控性与能观性不变性。
3、状态空间表达式→约旦标准型三、状态空间表达式(现代控制:内部描述)→传递函数阵(经典控制:外部描述)1. 已知()()()()()()()()()()x t A t x t B t u t y t C t x t D t u t =+= +,求传递函数1()()()adj s s G s s s --+-=-+=-C I A B D I AC I A BD I A四、组合系统1.(已知)若干子系统的并联、串联、输出反馈联结→(求)状态空间描述或传递函数阵第三章状态方程的解小结一、求状态方程的解1、对象:线性系统① 连续时间系统:定常(齐次、非齐次)、时变(齐次、非齐次)② 离散时间系统:定常(齐次、非齐次)、时变(齐次、非齐次)2、解的形式如线性时变连续时间系统非齐次(对象)状态方程的解为:000()(,)()(,)()()t t x t t t x t t B u d ττττ=Φ+Φ?3、求解的关键求解状态方程的关键是求出状态转移矩阵0(,)t t Φ(重点和难点);① 掌握状态转移矩阵的1)定义;2)基本性质;3)如何求;② 注意状态转移矩阵与矩阵指数的区别与相同点;③ 线性定常(时不变)连续时间系统状态转移矩阵(矩阵指数)的求法。
复习重点
第一章控制系统的状态空间描述
1 控制系统状态空间表达式
2 由系统的物理模型建立状态空间表达式
3 由系统的微分方程建立状态空间表达式
4 离散时间系统的状态空间表达式
第二章线性控制系统的分析
1 线性定常系统的运动分析
2 状态转移矩阵
3 线性定常非齐次状态方程的解
4 线性离散时间系统的运动分析
5 线性连续时间系统的离散化
第三章线性控制系统能控性和能观测性
1 线性连续系统的能控性及判据
2 线性连续系统的能观测性及判据
3 对偶原理概念
4 线性系统的能控标准型和能观测标准型
5 线性定常离散系统能控性与能观测性判据
6 线性系统的能控性结构分解和能观测性结构分解
7 传递函数矩阵的(能控、能观测、最小)实现
第四章控制系统的稳定性分析
1 李亚普诺夫稳定性定义
2 李亚普诺夫稳定性基本定理
3 线性系统李亚普诺夫稳定性分析
4 非线性系统李亚普诺夫稳定性分析
第五章线性定常系统综合
1 状态反馈和输出反馈
2 闭环系统的极点配置
3 状态观测器的实现
i。
现代控制理论知识点汇总Revised at 2 pm on December 25, 2020.第一章 控制系统的状态空间表达式1. 状态空间表达式 n 阶DuCx y Bu Ax x+=+= 1:⨯r u 1:⨯m y n n A ⨯: r n B ⨯: n m C ⨯:r m D ⨯:A 称为系统矩阵,描述系统内部状态之间的联系;B为输入(或控制)矩阵,表示输入对每个状态变量的作用情况;C 输出矩阵,表示输出与每个状态变量间的组成关系,D直接传递矩阵,表示输入对输出的直接传递关系。
2. 状态空间描述的特点①考虑了“输入-状态-输出”这一过程,它揭示了问题的本质,即输入引起了状态的变化,而状态决定了输出。
②状态方程和输出方程都是运动方程。
③状态变量个数等于系统包含的独立贮能元件的个数,n 阶系统有n 个状态变量可以选择。
④状态变量的选择不唯一。
⑤从便于控制系统的构成来说,把状态变量选为可测量或可观察的量更为合适。
⑥建立状态空间描述的步骤:a 选择状态变量;b 列写微分方程并化为状态变量的一阶微分方程组;c 将一阶微分方程组化为向量矩阵形式,即为状态空间描述。
⑦状态空间分析法是时域内的一种矩阵运算方法,特别适合于用计算机计算。
3. 模拟结构图(积分器 加法器 比例器)已知状态空间描述,绘制模拟结构图的步骤:积分器的数目应等于状态变量数,将他们画在适当的位置,每个积分器的输出表示相应的某个状态变量,然后根据状态空间表达式画出相应的加法器和比例器,最后用箭头将这些元件连接起来。
4. 状态空间表达式的建立① 由系统框图建立状态空间表达式:a 将各个环节(放大、积分、惯性等)变成相应的模拟结构图;b 每个积分器的输出选作i x ,输入则为i x;c 由模拟图写出状态方程和输出方程。
② 由系统的机理出发建立状态空间表达式:如电路系统。
通常选电容上的电压和电感上的电流作为状态变量。
利用KVL 和KCL 列微分方程,整理。
《现代控制理论》课程回顾第一部分 系统数学模型的建立1.系统数学模型的种类:A 、输入输出描述:输入输出微分方程、输入输出差分方程:)()()()()()()()()(1)2(2)1(11)2(2)1(1)(t u b t ub t u b t u b t y a t ya t y a t y a t y n n n n n n n n n ++++=+++++------][]1[]2[]1[][]1[]2[]1[][121121n k u b n k b k u b k u b n k y a n k a k y a k y a k y n n n n -++-++-+-=-++-++-+-+--传递函数(s 域)、脉冲传递函数(z 域)nn n n nn n n n a s a s a s a s b s b s b s b s u s y s g +++++++++==------1221112211)(ˆ)(ˆ)(ˆ n n n n n n n n n a z a z a z a z b z b z b z b z uz yz g +++++++++==------1221112211)(ˆ)(ˆ)(ˆ 传递矩阵(s 域)、脉冲传递矩阵(z 域))(ˆ)()(ˆ:)(s s s s u G yG = )(ˆ)()(ˆ:)(z z z z u G yG = 脉冲响应函数、脉冲相应矩阵:(因果、t 0时刻松弛)⎰⎰⎰⎰ττ-τ=τττ-=τττ-=τττ-=∞-∞+∞-tt tt td t u g d u t g d u t g d u t g t y 0)()()()()()()()()(⎰⎰⎰⎰ττ-τ=τττ-=τττ-=τττ-=∞-∞+∞-tt t t t d t d t d t d t t 0)()()()()()()()()(u G u G u G u G yB 、状态空间描述基本概念:状态、状态变量、状态向量、状态空间、状态轨线、状态方程、输出方程、动态方程(状态空间表达式、状态空间方程、状态方程)线性系统的结构图2.线性系统动态方程的建立A 、由系统机理出发建立系统的状态空间表达式这是最基本的方法实践中这也是主要的甚至是唯一的方法。
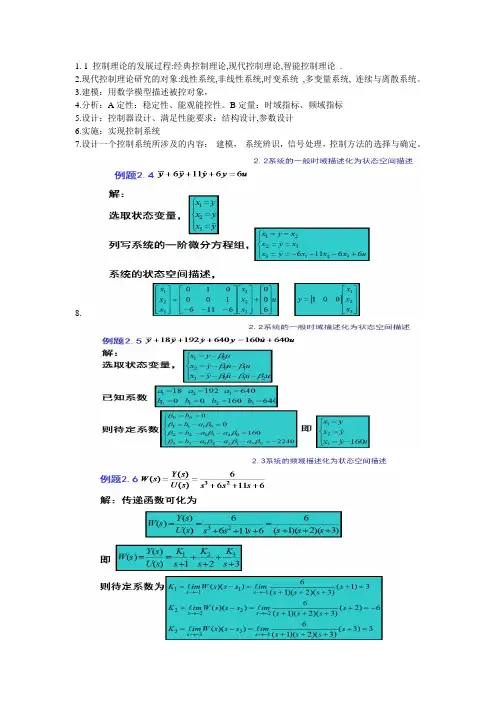
1. 1 控制理论的发展过程:经典控制理论,现代控制理论,智能控制理论.
2.现代控制理论研究的对象:线性系统,非线性系统,时变系统,多变量系统, 连续与离散系统。
3.建模:用数学模型描述被控对象,
4.分析:A定性:稳定性、能观能控性。
B定量:时域指标、频域指标
5.设计:控制器设计、满足性能要求:结构设计,参数设计
6.实施:实现控制系统
7.设计一个控制系统所涉及的内容:建模,系统辨识,信号处理,控制方法的选择与确定。
8.
系统的状态空间描述为
系统的状态空间描述为
§5.1 状态反馈
7.3.李亚普诺夫稳定性。
现代控制理论课程复习要点现代控制理论课程复习要点第一章1.已知系统的状态方程和输出方程(以线性方程组的形式给出),如何写出其向量-矩阵方程并画出状态变量图。
2. 已知系统的状态空间模型表达式,如何将其转换为对角线规范型。
(注意复习3*3矩阵的求逆、行列式计算的方法,切记)该类题目具体做法有两种:(1)方法一:求出该系统特征值,特征向量,利用特征向量构成非奇异转换矩阵P ,然后利用线性转换公式:11,,A P AP B P B C CP --=== 求出对应对角线规范型。
(2)方法二:求出该系统特征值,利用特征值,构成范德蒙德矩阵,并将该矩阵作为非奇异转换矩阵P ,然后利用线性转换公式:11,,A P AP B P B C CP --=== 求出对应对角线规范型。
第二章1. 已知系统状态转移矩阵()t Φ,如何求出该系统状态方程中的系统矩阵A 的值;该题的主要考点在于:()t Φ的一阶导数在t=0时的值为A ,即t 0()|A t ==Φ。
2.已知状态空间模型,如何求输入()u t 为单位阶跃函数时,该状态空间表达式的解;(利用非齐次状态空间模型的解公式求就可以了)3. 已知线性定常系统齐次状态方程,试利用特征值规范型方法求出状态转移矩阵()t Φ。
具体解法:(1)先求出该系统的特征值:s -0I A = ,特征值分别为123λλλ,, ;(2)根据特征值123λλλ,,求对应的特征向量123,,p p p ,并以此构成非奇异转换矩阵[]123=P p p p ;(3)根据特征值规范型的特性可知,特征值规范型系统的状态转移矩阵为12300(t)000tt t e e e λλλΦ=?? (4)最后将该状态转移矩阵转换回普通形式的状态转移矩阵1(t)P (t)P -Φ=Φ .第三章1. 已知线性定常系统的状态方程(该方程中含未定参数),试确定系统在平衡状态处大范围渐进稳定时,这些未定参数应满足的条件。
第二章线性系统的数学描述数学模型可以有许多不同的形式,较常见的有三种:第一种是:把系统的输入量和输出量之间的关系用数学方式表达出来,称之为输入输出描述,或外部描述;第二种是:不仅可以描述系统输入、输出之间的关系,而且还可以描述系统的内部特性,称之为状态空间描述或内部描述;第三种是:用比较直观的方块图(结构图)和信号流图模型进行描述。
910 2.1 线性系统的时域数学模型()(1)(2)121()()()()()n n n n n c t a c t a c t a c t a c t ---+++++()(1)(2)0121()()()()()m m m m m b r t b r t b r t b r t b r t ---=+++++ (2.1) 式中,()r t 和()c t 分别是系统的输入信号和输出信号,()()n c t 为()c t 对时间t 的n 阶导数;i a (1,2,)i n =和j b (0,1,)j m =是由系统的结构参数决定的系数。
2.2 传递函数11m n b s a s --++++++11 式中1011()m m m m M s b s b s b s b --=++++1011()nn n n N s a s a s a s a --=++++()M s 和()N s 分别称为传递函数()G s 的分子多项式和分母多项式。
2.5 线性系统的状态空间描述A Buy C du =+⎧⎨=+⎩x x x(2.3) 2.5.2 状态空间表达式与传递函数的关系1()()G s C sI A B D -=-+(2.4)12 2.5.3 状态空间表达式的建立情形一: 线性微分方程中不含输入的导数项,传递函数没有零点()(1)11n n n n y a y a y a y u --++++= (2.5)情形二 线性微分方程含有输入的导数(不超过3阶),传递函数有零点 ()(1)()(1)11011n n n n n n n n y a y a y a y b u b u b u b u ----++++=++++ (2.6) 1011111()()n n n nn n n nb s b s b s b Y s U s s a s a s a ----++++=++++(2.7)13 Chp.9 状态空间系统响应、可控性与可观性9.1 线性定常系统的响应已知线性定常连续系统状态方程的一般形式为0()()(), (0)t A t B t =+=x x u x x(2.8) 状态变量的初始值为0x ,控制作用为()t u 。
现代控制理论知识点归纳现代控制理论是指20世纪后半叶发展起来的控制理论,其主要特点是运用数学、电子和计算机等高科技手段解决实际控制问题,在控制理论研究和应用方面取得了巨大成就。
本文将对现代控制理论的知识点进行归纳,以便更好地理解和掌握该学科。
1. 控制系统的基本概念。
控制系统指通过对被控对象施加控制以达到预期目的的系统,由输入信号、控制器、被控对象和输出信号组成。
其中输入信号指控制器对被控对象的输入,包括指令信号、干扰信号和噪声信号;控制器是控制系统的核心,通常使用反馈控制器、前馈控制器和组合控制器等;被控对象是控制系统中被控制的对象,包括机械系统、电力系统、化学系统等;输出信号是被控对象的响应信号,可分析其稳定性、动态性能和鲁棒性等。
2. 系统建模和分析。
将实际控制系统抽象为数学模型是现代控制理论的基础。
系统建模的方法包括基于物理原理的建模、基于经验的建模和基于统计学的建模等。
针对特定的控制问题可采用不同的建模方法。
系统的分析包括稳定性分析、动态性能分析和鲁棒性分析等。
稳定性是控制系统的基本要求,通过判断系统是否稳定可以避免系统崩溃或振荡。
动态性能是指控制系统对输入信号的响应能力,包括动态误差、响应时间、超调量等性能指标。
鲁棒性是指控制系统对参数变化或外界干扰的鲁棒性,越强的控制系统对各种不确定因素的适应能力越强。
3. 控制器设计。
现代控制理论的目的是设计出满足控制要求的控制器,设计控制器的方法包括传统方法和现代方法。
传统方法是指使用PID控制器、状态反馈控制器、最优控制器等传统方法设计控制器。
现代方法是指使用神经网络、模糊控制、滑动模式控制等现代方法设计控制器。
设计控制器需要综合考虑系统的稳定性、动态性能和鲁棒性等因素。
4. 联合控制系统。
现代控制理论还涉及联合控制系统的研究,即将机械、电气、电子、计算机等多方面因素融合在一起,实现更加复杂的控制任务。
联合控制系统的研究需要考虑各种子系统之间的协同和交互作用,同时要保证系统的稳定性和鲁棒性。
现代控制理论复习总纲判断题部分 5题×2=10一、(10分,每小题1分)试判断以下结论的正确性,若结论是正确的,则在括号里打√,反之打×。
1、具有对角标准形状态空间描述的系统可以看成是由多个一阶环节串联组成的系统。
(× ) 2、传递函数的状态空间实现不唯一的一个主要原因是状态变量选取不唯一。
(√ ) 3、状态变量是用于完全描述系统动态行为的一组变量,因此都具有物理意义。
( × ) 4、输出变量是状态变量的部分信息,因此一个系统状态能控意味着系统输出能控。
(× ) 5、等价的状态空间模型具有相同的传递函数。
(√ )6、若传递函数存在零极相消,则对应的状态空间模型描述的系统是不能控的。
(× )7、若线性系统是李雅普诺夫意义下稳定的,则它是大范围渐近稳定的。
( √ )8、若一线性定常系统的平衡状态是渐近稳定的,则从系统的任意一个状态出发的状态轨迹随着时间的推移都将收敛到该平衡状态。
(√ )9、状态反馈控制可改变系统的稳定性、动态性能,但不改变系统的能控性和能观性。
(× ) 10、如果一个系统的李雅普诺夫函数确实不存在,那么我们就可以断定该系统是不稳定的。
(× ) 11.描述系统的状态方程不是唯一的。
√12.用独立变量描述的系统状态向量的维数不是唯一的。
×13.对单输入单输出系统,如果1()C sI A B --存在零极点对消,则系统一定不可控或者不可观测。
√ 14.对多输入多数出系统,如果1()sI A B --存在零极点对消,则系统一定不可控。
× 15.李雅普诺夫直接法的四个判定定理中所述的条件都是充分条件。
√16.李雅普诺夫函数是正定函数,李雅普诺夫稳定性是关于系统平衡状态的稳定性。
√ 17.线性定常系统经过非奇异线性变换后,系统的可控性不变。
√ 18.用状态反馈进行系统极点配置可能会改变系统的可观测性。
现代控制理论课程复习要点
第一章
1.已知系统的状态方程和输出方程(以线性方程组的形式给出),如何写出其向量-矩阵方程并画出状态变量图。
2. 已知系统的状态空间模型表达式,如何将其转换为对角线规范型。
(注意复习3*3矩阵的求逆、行列式计算的方法,切记)
该类题目具体做法有两种:
(1) 方法一:求出该系统特征值,特征向量,利用特征向量构成非奇异转换矩
阵P ,然后利用线性转换公式:11,,A P AP B P B C CP --=== 求出对应对角线规范型。
(2) 方法二:求出该系统特征值,利用特征值,构成范德蒙德矩阵,并将该矩
阵作为非奇异转换矩阵P ,然后利用线性转换公式:11,,A P AP B P B C CP --=== 求出对应对角线规范型。
第二章
1. 已知系统状态转移矩阵()t Φ,如何求出该系统状态方程中的系统矩阵A 的值; 该题的主要考点在于:()t Φ的一阶导数在t=0时的值为A ,即t 0()|A t ==Φ。
2.已知状态空间模型,如何求输入()u t 为单位阶跃函数时,该状态空间表达式的解;(利用非齐次状态空间模型的解公式求就可以了)
3. 已知线性定常系统齐次状态方程,试利用特征值规范型方法求出状态转移矩阵()t Φ。
具体解法:
(1) 先求出该系统的特征值:s -0I A = ,特征值分别为123λλλ,, ;
(2) 根据特征值123λλλ,,求对应的特征向量123,,p p p ,并以此构成非奇异转
换矩阵[]123=P p p p ;
(3) 根据特征值规范型的特性可知,特征值规范型系统的状态转移矩阵为
12300(t)0
00t
t t e e e λλλ⎡⎤⎢⎥Φ=⎢⎥⎢⎥⎣⎦ (4) 最后将该状态转移矩阵转换回普通形式的状态转移矩阵1(t)P (t)P -Φ=Φ .
第三章
1. 已知线性定常系统的状态方程(该方程中含未定参数),试确定系统在平衡状态处大范围渐进稳定时,这些未定参数应满足的条件。
(该类题目,第一步先要求出系统的平衡状态是什么,这一步不能缺)
该类题目具体做法有两种:
方法一:线性定常系统在平衡状态处大范围渐进稳定,则其系统特征值应该在左半平面。
从这个思路可以去判断。
方法二:可根据教材P149页,第10题的做法去判断。
(利用线性定常系统的李雅普诺夫稳定性判据进行判断,即利用T A P PA Q +=- 求出矩阵P,然后根据P 是正定时,确定未定参数应该满足什么条件)
2. 给定系统的状态方程,分析系统平衡状态的稳定性。
(构建能量函数,利用李亚普诺夫第二方法进行判断)
第四章
1. 已知系统状态空间模型表达式,如何将其转换为可控标准型;
2. 已知系统状态空间模型表达式,如何求该系统传递函数矩阵;
3. 已知系统状态空间模型表达式,判断系统的能控性,若完全能控,则将系统化为能控规范型;若不完全能控,则将系统按能控性分解。
第五章
1. 给定系统状态空间模型表达式,如何判断该系统的极点是否可以任意配置(即可控性判断);
2.如果极点可以任意配置,则当指定具体配置极点时,如何求出对应的状态反馈
矩阵。
3.给定系统的传递函数,写出系统的能控标准型的状态方程和输出方程;
4.如何画出反馈系统状态变量图。
第六章
1.已知系统状态空间模型表达式,如何判断该系统的可控性和可观测性;
2.如何设计一个全维状态观测器,使闭环系统极点位于指定的位置;
3.如何画出带状态观测器的系统状态变量结构图。