大连理工大学非线性分析第三次作业汇编
- 格式:doc
- 大小:1.17 MB
- 文档页数:8

第三章 逐次逼近法1.1内容提要1、一元迭代法x n+1=φ(x n )收敛条件为:1)映内性x ∈[a,b],φ(x) ∈[a,b] 2)压缩性∣φ(x) -φ(y)∣≤L ∣x-y ∣其中L <1,此时φ为压缩算子,在不断的迭代中,就可以得到最终的不动点集。
由微分中值定理,如果∣φ’∣≤L <1,显然它一定满足压缩性条件。
2、多元迭代法x n+1=φ(x n )收敛条件为:1)映内性x n ∈Ω,φ(x n ) ∈Ω 2)压缩性ρ(▽φ)<1,其中▽φ为x n 处的梯度矩阵,此时φ为压缩算子,在不断的迭代中,就可以得到最终的不动点集。
3、当φ(x )= Bx+f 时,收敛条件为,ρ(B )<1,此时x n+1= Bx n +f ,在不断的迭代中,就可以得到线性方程组的解。
4、线性方程组的迭代解法,先作矩阵变换 U L D A --= Jacobi 迭代公式的矩阵形式 f Bx b D x U L D x n n n +=++=--+111)(Gauss-Seidel 迭代公式的矩阵形式 f Bx b L D Ux L D x n n n +=-+-=--+111)()( 超松弛迭代法公式的矩阵形式f Bx b L D x U D L D x k k k +=-++--=--+ωωωωω111)(])1[()(三种迭代方法当1)(<B ρ时都收敛。
5、线性方程组的迭代解法,如果A 严格对角占优,则Jacob 法和Gauss-Seidel 法都收敛。
6、线性方程组的迭代解法,如果A 不可约对角占优,则Gauss-Seidel 法收敛。
7、Newton 迭代法,单根为二阶收敛 2211'''21lim)(2)(lim---∞→+∞→--=-==--k k k k k k k k x x x x f f c x x ξξαα8、Newton 法迭代时,遇到重根,迭代变成线性收敛,如果知道重数m , )()('1k k k k x f x f m x x -=+仍为二阶收敛 9、弦割法)()())((111--+---=k k k k k k k x f x f x x x f x x 的收敛阶为1.618,分半法的收敛速度为(b-a )/2n-110、Aitken 加速公式11211112)(),(),(+----+-+--+---+---===k k k k k k k k k k k x x x x x x x x x x x ϕϕ1.2 典型例题分析1、证明如果A 严格对角占优,则Jacob 法和Gauss-Seidel 法都收敛。
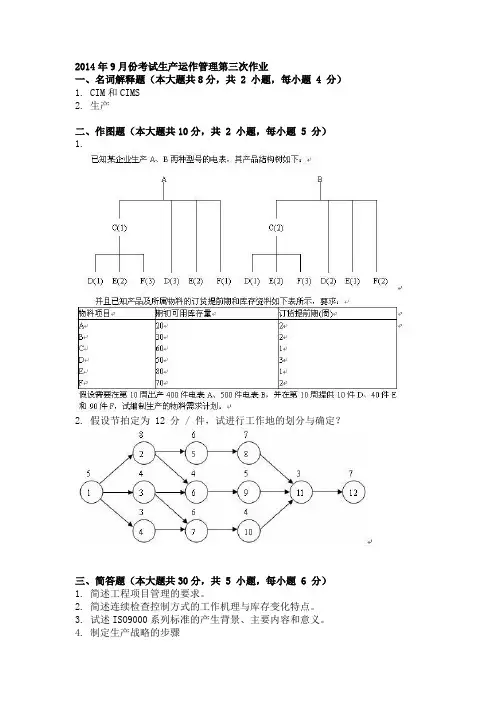
2014年9月份考试生产运作管理第三次作业一、名词解释题(本大题共8分,共 2 小题,每小题 4 分)1. CIM和CIMS2. 生产二、作图题(本大题共10分,共 2 小题,每小题 5 分)1.2. 假设节拍定为 12 分 / 件,试进行工作地的划分与确定?三、简答题(本大题共30分,共 5 小题,每小题 6 分)1. 简述工程项目管理的要求。
2. 简述连续检查控制方式的工作机理与库存变化特点。
3. 试述ISO9000系列标准的产生背景、主要内容和意义。
4. 制定生产战略的步骤5. 衡量生产系统的绩效有哪些指标?说明这些指标的含义。
四、问答题(本大题共40分,共 5 小题,每小题 8 分)1. 影响库存控制决策的因素有哪些?2. MRPⅡ有哪些主要的特点?它与现行计划方式有哪些主要区别?3. 简述你对“库存是万恶之源”这一说法的看法。
我国企业采用JIT减少库存是否可行?4. 虚拟企业有哪些基本类型?实现虚拟企业需要哪些硬件和软件?5. 全面质量管理与ISO9000 系列标准有什么关系?五、案例分析题(本大题共12分,共 1 小题,每小题 12 分)翻阅大连理工大学《生产与运作管理》教材49-52页,“联大玻璃烟缸厂”案例,要求回答下列问题:(1)“板凳师傅”工作的生产过程组织形式是什么,为什么?(2)生产流程有什么问题?用5W1H方法提出改进方案;(3)请绘出改进后的工作路线示意图;答案:一、名词解释题(8分,共 2 题,每小题 4 分)1.参考答案:CIM是一种组织、管理和运行企业的理念。
它将传统的制造技术、管理技术、自动化技术、系统工程技术等有机地结合,借助计算机,使企业产品全生命周期,即市场需求分析、产品定义、研究开发、设计、生产、支持(包括质量、销售、采购、发送、服务)及产品最后报废、环境处理等各阶段活动中有关的人/组织、经营管理和技术三要素及其信息流、物流和价值流(以及产品T、Q、C、S、E等价值指标所体现的企业业务过程流,如成本流等)有机集成,并优化运行,以达到产品上市快、高质、低耗、服务好、环境清洁,进而提高企业的柔性、健壮性、敏捷性,使企业赢得市场竞争。
大连理工大学优化方法上机作业本页仅作为文档页封面,使用时可以删除This document is for reference only-rar21year.March优化方法上机大作业学院:电子信息与电气工程学部姓名:学号:指导老师:上机大作业(一)%目标函数function f=fun(x)f=100*(x(2)-x(1)^2)^2+(1-x(1))^2;end%目标函数梯度function gf=gfun(x)gf=[-400*x(1)*(x(2)-x(1)^2)-2*(1-x(1));200*(x(2)-x(1)^2)]; End%目标函数Hess矩阵function He=Hess(x)He=[1200*x(1)^2-400*x(2)+2,-400*x(1);-400*x(1), 200;];end%线搜索步长function mk=armijo(xk,dk)beta=0.5; sigma=0.2;m=0; maxm=20;while (m<=maxm)if(fun(xk+beta^m*dk)<=fun(xk)+sigma*beta^m*gfun(xk)'*dk) mk=m; break;endm=m+1;endalpha=beta^mknewxk=xk+alpha*dkfk=fun(xk)newfk=fun(newxk)%最速下降法function [k,x,val]=grad(fun,gfun,x0,epsilon)%功能:梯度法求解无约束优化问题:minf(x)%输入:fun,gfun分别是目标函数及其梯度,x0是初始点,% epsilon为容许误差%输出:k是迭代次数,x,val分别是近似最优点和最优值maxk=5000; %最大迭代次数beta=0.5; sigma=0.4;k=0;while(k<maxk)gk=feval(gfun,x0); %计算梯度dk=-gk; %计算搜索方向if(norm(gk)<epsilon), break;end%检验终止准则m=0;mk=0;while(m<20) %用Armijo搜索步长if(feval(fun,x0+beta^m*dk)<=feval(fun,x0)+sigma*beta^m*gk'*dk) mk=m;break;endm=m+1;endx0=x0+beta^mk*dk;k=k+1;endx=x0;val=feval(fun,x0);>> x0=[0;0];>> [k,x,val]=grad('fun','gfun',x0,1e-4)迭代次数:k =1033x =0.99990.9998val =1.2390e-008%牛顿法x0=[0;0];ep=1e-4;maxk=10;k=0;while(k<maxk)gk=gfun(x0);if(norm(gk)<ep)x=x0miny=fun(x)k0=kbreak;elseH=inv(Hess(x0));x0=x0-H*gk;k=k+1;endendx =1.00001.0000miny =4.9304e-030迭代次数k0 =2%BFGS方法function [k,x,val]=bfgs(fun,gfun,x0,varargin) %功能:梯度法求解无约束优化问题:minf(x)%输入:fun,gfun分别是目标函数及其梯度,x0是初始点,% epsilon为容许误差%输出:k是迭代次数,x,val分别是近似最优点和最优值N=1000;epsilon=1e-4;beta=0.55;sigma=0.4;n=length(x0);Bk=eye(n);k=0;while(k<N)gk=feval(gfun,x0,varargin{:});if(norm(gk)<epsilon), break;enddk=-Bk\gk;m=0;mk=0;while(m<20)newf=feval(fun,x0+beta^m*dk,varargin{:});oldf=feval(fun,x0,varargin{:});if(newf<=oldf+sigma*beta^m*gk'*dk)mk=m;break;endm=m+1;endx=x0+beta^mk*dk;sk=x-x0;yk=feval(gfun,x,varargin{:})-gk;if(yk'*sk>0)Bk=Bk-(Bk*sk*sk'*Bk)/(sk'*Bk*sk)+(yk*yk')/(yk'*sk);endk=k+1;x0=x;endval=feval(fun,x0,varargin{:});>> x0=[0;0];>> [k,x,val]=bfgs('fun','gfun',x0)k =20x =1.00001.0000val =2.2005e-011%共轭梯度法function [k,x,val]=frcg(fun,gfun,x0,epsilon,N)if nargin<5,N=1000;endif nargin<4, epsilon=1e-4;endbeta=0.6;sigma=0.4;n=length(x0);k=0;while(k<N)gk=feval(gfun,x0);itern=k-(n+1)*floor(k/(n+1));itern=itern+1;if(itern==1)dk=-gk;elsebetak=(gk'*gk)/(g0'*g0);dk=-gk+betak*d0; gd=gk'*dk;if(gd>=0),dk=-gk;endendif(norm(gk)<epsilon),break;endm=0;mk=0;while(m<20)if(feval(fun,x0+beta^m*dk)<=feval(fun,x0)+sigma*beta^m*gk'*dk) mk=m;break;endm=m+1;endx=x0+beta^m*dk;g0=gk; d0=dk;x0=x;k=k+1;endval=feval(fun,x);>> x0=[0;0];[k,x,val]=frcg('fun','gfun',x0,1e-4,1000)k =122x =1.00011.0002val =7.2372e-009上机大作业(二)%目标函数function f_x=fun(x)f_x=4*x(1)-x(2)^2-12;%等式约束条件function he=hf(x)he=25-x(1)^2-x(2)^2;end%不等式约束条件function gi_x=gi(x,i)switch icase 1gi_x=10*x(1)-x(1)^2+10*x(2)-x(2)^2-34;case 2gi_x=x(1);case 3gi_x=x(2);otherwiseend%求目标函数的梯度function L_grad=grad(x,lambda,cigma)d_f=[4;2*x(2)];d_g(:,1)=[-2*x(1);-2*x(2)];d_g(:,2)=[10-2*x(1);10-2*x(2)];d_g(:,3)=[1;0];d_g(:,4)=[0;1];L_grad=d_f+(lambda(1)+cigma*hf(x))*d_g(:,1);for i=1:3if lambda(i+1)+cigma*gi(x,i)<0L_grad=L_grad+(lambda(i+1)+cigma*gi(x,i))*d_g(:,i+1);continueendend%增广拉格朗日函数function LA=lag(x,lambda,cee)LA=fun(x)+lambda(1)*hf(x)+0.5*cee*hf(x)^2;for i=1:3LA=LA+1/(2*cee)*(min(0,lambda(i+1)+cee*gi(x,i))^2-lambda(i+1)^2); endfunction xk=BFGS(x0,eps,lambda,cigma)gk=grad(x0,lambda,cigma);res_B=norm(gk);k_B=0;a_=1e-4;rho=0.5;c=1e-4;length_x=length(x0);I=eye(length_x);Hk=I;while res_B>eps&&k_B<=10000dk=-Hk*gk;m=0;while m<=5000if lag(x0+a_*rho^m*dk,lambda,cigma)-lag(x0,lambda,cigma)<=c*a_*rho^m*gk'*dkmk=m;break;endm=m+1;endak=a_*rho^mk;xk=x0+ak*dk;delta=xk-x0;y=grad(xk,lambda,cigma)-gk;Hk=(I-(delta*y')/(delta'*y))*Hk*(I-(y*delta')/(delta'*y))+(delta*delta')/(delta'*y);k_B=k_B+1;x0=xk;gk=y+gk;res_B=norm(gk);end%增广拉格朗日法function val_min=ALM(x0,eps)lambda=zeros(4,1);cigma=5;alpha=10;k=1;res=[abs(hf(x0)),0,0,0];for i=1:3res(1,i+1)=norm(min(gi(x0,i),-lambda(i+1)/cigma)); endres=max(res);while res>eps&&k<1000xk=BFGS(x0,eps,lambda,cigma);lambda(1)=lambda(1)+cigma*hf(xk);for i=1:3lambda(i+1)=lambda(i+1)+min(0,lambda(i+1)+gi(x0,1)); endk=k+1;cigma=alpha*cigma;x0=xk;res=[norm(hf(x0)),0,0,0];for i=1:3res(1,i+1)=norm(min(gi(x0,i),-lambda(i+1)/cigma)); endres=max(res);endval_min=fun(xk);fprintf('k=%d\n',k);fprintf('fmin=%.4f\n',val_min);fprintf('x=[%.4f;%.4f]\n',xk(1),xk(2));>> x0=[0;0];>> val_min=ALM(x0,1e-4)k=10fmin=-31.4003x=[1.0984;4.8779]val_min =-31.4003上机大作业(三)A=[1 1;-1 0;0 -1];n=2;b=[1;0;0];G=[0.5 0;0 2];c=[2 4];cvx_solver sdpt3cvx_beginvariable x(n)minimize (x'*G*x-c*x)subject toA*x<=bcvx_enddisp(x)Status: SolvedOptimal value (cvx_optval): -2.40.40000.6000A=[2 1 1;1 2 3;2 2 1;-1 0 0;0 -1 0;0 0 -1]; n=3;b=[2;5;6;0;0;0];C=[-3 -1 -3];cvx_solver sdpt3cvx_beginvariable x(n)minimize (C*x)subject toA*x<=bcvx_enddisp(x)Status: SolvedOptimal value (cvx_optval): -5.40.20000.00001.600011。
非线性环节实验报告引言非线性系统在现实生活中的广泛应用引起了研究者们的极大关注。
非线性环节作为其中的重要组成部分,对系统的稳定性和性能起着至关重要的作用。
本实验通过建立一个非线性环节的模型,探究其对系统行为的影响,并分析非线性环节的性能和稳定性特性。
实验目的1. 建立一个非线性环节的数学模型;2. 分析非线性环节对系统行为的影响;3. 考察非线性环节的性能和稳定性特性。
实验原理非线性环节是指输入与输出之间不满足线性关系的部分。
在控制系统中,非线性环节可能会导致系统产生不确定性和非稳定的行为。
为了研究非线性环节的特性,本实验使用了一个常见的非线性函数作为实验模型,即sigmoid函数。
Sigmoid函数定义如下:f(x) = \frac{1}{{1+e^{-ax}}}其中,x代表输入,a代表一个可调节的参数,f(x)代表经过非线性环节后的输出。
实验步骤1. 首先,我们需要选择合适的参数a值来控制sigmoid函数的形状。
较小的a 值将导致sigmoid函数的输出变化更缓慢,而较大的a值则会使函数的曲线更陡峭。
本次实验选择a=2作为sigmoid函数的参数。
2. 在Matlab或Python等工具中编写代码,根据sigmoid函数的表达式计算输入x对应的输出f(x)。
3. 绘制x与f(x)之间的关系曲线,观察并分析非线性环节对系统行为的影响。
实验结果根据实验步骤所给出的sigmoid函数表达式和参数,我们得到了如下结果:import numpy as npdef sigmoid(x, a):return 1 / (1 + np.exp(-a * x))x = np.linspace(-10, 10, 100)a = 2y = sigmoid(x, a)import matplotlib.pyplot as pltplt.plot(x, y)plt.xlabel('Input (x)')plt.ylabel('Output (f(x))')plt.title('Nonlinear Link Function')plt.grid(True)plt.show()如上所示的代码及其运行结果,绘制了sigmoid函数的输入和输出之间的关系曲线。
目录一、设计任务书及原始数据 (2)二、根据已知条件计算传动件的作用力 (3)2.1计算齿轮处转矩T、圆周力F t 、径向力F r及轴向力F a .. 3 2.2计算链轮作用在轴上的压力 (3)2.3计算支座反力 (4)三、初选轴的材料,确定材料的机械性能 (4)四、进行轴的结构设计 (5)4.1确定最小直径 (5)4.2设计其余各轴段的直径和长度,且初选轴承型号 (5)4.3选择连接形式与设计细部结构 (6)五.轴的疲劳强度校核 (6)5.1轴的受力图 (6)5.2绘制弯矩图 (7)5.3绘制转矩图 (8)5.4确定危险截面 (9)5.5计算当量应力,校核轴的疲劳强度 (9)六、选择轴承型号,计算轴承寿命 (10)6.1计算轴承所受支反力 (10)6.2计算轴承寿命 (11)七、键连接的计算 (11)八、轴系部件的结构装配图 (12)一、设计任务书及原始数据题目二:二级展开式斜齿圆柱齿轮减速器输出轴组合结构设计表1 设计方案及原始数据二、根据已知条件计算传动件的作用力2.1计算齿轮处转矩T、圆周力F t、径向力F r及轴向力F a已知:轴输入功率P=4.3kW,转速n=130r/(min)。
(1)齿轮上的力转矩计算公式:T=9.550×106P/n将数据代入公式中,得:T=315885(N·mm)圆周力计算公式:Ft=2T/,==416(mm) (认为是法面模数)将转矩T带入其中,得:Ft=1519(N)径向力计算公式:Fr =Ft×tanα/cos,=将圆周力Ft 带入其中,得:Fr=558(N)轴向力计算公式:Fa = Ft×tan将圆周力Ft 带入其中,得:Fa=216(N)2.2计算链轮作用在轴上的压力链轮的分度园直径链速v=链的圆周力F=链轮作用在轴上的压力2.3计算支座反力1、计算垂直面(XOZ)支反力根据受力分析图,我们可以利用垂直面力矩平衡原理(ΣMY=0)得出求解A点垂直面支反力Rz1:R z1= Ft1- Rz2ΣM a= R Z2× l AC- F t1× l AB=0即ΣMa =1519 ×135-RZ2× 215=0RZ2=954 NRz1=565 N2、计算水平面(XOY)支反力根据受力分析图,我们可以利用水平面力矩平衡原理(ΣMZ=0)得出求解A点水平面支反力Ry1的计算公式:R y1= FQ- Ry2–FrΣM Z= R y2× l AC+ F r× l AB +F a×r- F Q× l ADΣM Z=R y2× 215+558×135+216×135-×315=0Ry2=4437NRy1=- 4437 –558=-1635 N三、初选轴的材料,确定材料的机械性能初选材料及机械性能见表四、进行轴的结构设计4.1确定最小直径按照扭转强度条件计算轴的最小值d min。
数字电路与系统_大连理工大学中国大学mooc课后章节答案期末考试题库2023年1.ASM图是数字系统控制过程的算法流程图,表示了所有操作的准确时间序列,精确到一个时钟周期。
参考答案:正确2.把256×2的RAM,扩展成256×4的RAM,需要2片256×2的RAM。
参考答案:正确3.设计三种图案彩灯控制系统的控制器。
三种图案彩灯依次循环亮,其中苹果形图案灯亮16 s,香蕉形图案灯亮12 s,葡萄形图案灯亮9 s。
用逻辑变量A、B、G分别表示苹果灯、香蕉灯、葡萄灯。
用逻辑变量X、Y、Z分别表示计时信号16s、12s、9s。
下列ASM图正确表示了该灯光控制系统。
【图片】参考答案:错误4.计数器不是时序逻辑电路。
参考答案:错误5.已知有DAC电路,如下图所示。
其中【图片】,【图片】=5伏,当输入二进制数为110时,输出电压是多少?【图片】参考答案:-3.75 伏6.观察下列电路,Vref=10伏,如果输入二进制数为1000000000时,输出电压多少?【图片】参考答案:0 伏7.一般来说,时序逻辑电路由组合电路和触发器两部分组成。
参考答案:正确8.74161是一款模15的计数器。
参考答案:错误9.74163是异步清零、同步置数的计数器。
参考答案:错误10.如果用卡诺图化简逻辑函数,拟得到最简或与式,应该在卡诺图上圈0。
参考答案:正确11.具有直接输入端的触发器,其直接输入端有最高优先权,可以直接决定触发器的状态。
参考答案:正确12.在用卡诺图求逻辑函数的最简与或式的时候,如果有一个圈中的1都被别的圈包含了,那么可以断定:这个圈是多余的。
参考答案:正确13.用74290实现模40的计数器,至少需要2片74290。
参考答案:正确14.把石英晶体加入多谐振荡器电路中,其目的是让频率更稳定。
参考答案:正确15.观察下图,该多路数据选择器完成的逻辑函数是【图片】【图片】参考答案:正确16.已知一个数字系统,有5个独立状态。

大连理工大学2022数学分析考研真题试卷简答题(每题6分,共60分)1 1对任意的正整数k,存在正熬数N,当n>N时,有Ia n -al<-)此是否可以什为hm O,n =a的k n-oc, 定义?为什么?2.求f(x )=沪|尤-11在[-1,1]上的极值点与极值3证明J(x)= cos沪在(-OO )+OO)上不一致连续4设f(x )在[a ,叶上至多有第一类间断点证明j位)在[a ,b]上有界5试构造收敛的正项级数〉:an,使得lirn supn 加21仰=+O O”-+3C,It=l 6设封闭曲线f:x 3+沪=3xy,X 2: 0, y之0,求r 所包围区域的面积7设J(x)在[a ,b]上连续,在(a,b)上可微,f(b) > f (a),且J(x)不是一次函数证明存在�E (a, b), 使得!'(�)> J(b ) -f(a) b -aX -!丿8.求极限lim ;t...OO 泸-叨+l2''!J...OO 9设f(x )在(-OO,+OO)上连续,定义g(t)=f 位-t)勺(t )dt求g "'(x)。
10证明函数f 伈)=区n2 x ''·在-泸+2 (-e, e)上有任总阶导数n=l 二计算题(每题10分,共30分)+OO 1设bE凡计算!产cos bxdx.() 2设曲面I:: 9沪+4沪+z2= 1,方向朝外,计符曲而积分j x d ydz + y dzdx + z d 兀dy $ !但+2沪+3丑)}3 设向觉场F(x ,y,z)= 1 沪+沪+z 2+ 2功(兀十!尸+y,z),z>O ,求F的势函数,三证明题(每题12分,共60分)1设f(x)是[0,+o o )上的连续可微的凸函数,定义h(x)=J 。
:'f (l ) d t , X > 0时证明.h(兀)是冗(0, +oo)上的凸函数2设儿(沈)均在[a ,b]上可微,n = 1, 2, 3, • • 且存在正常数!V I >0,使得I J :1(x)I � M, n = 1, 2, 3, •• •, XE [a ,b]若函数列{f )l ,位)}在[a ,b]上逐点收敛证明函数列{儿(尤)}在Ia,bl上一致收敛3设B,C都是n阶实的常数矩阵,且C是非奇异的定义映射f 厌'i---t 脱'l 为f位)=Cx+B(x @x)这里xox定义为兀0兀=(叶,马`,点)T E贮.证明f 的值域至少包含一个内点.4设f (午)在[a ,,b]上有二阶连续导数,且f(a ) = f (b) = 0,证明max |f(午)|三(b -a )2 max |f r 心扛51)8 心还/15设瓜)住[a,+oo )上单调递减JI广义积分「00f(x) d 扎.收敛证明lim叶(:r ;)= 0 "x->+oo (a:) I大连理工大学 2022 年数学分析考研试题解答-简答题(每题6分,共60分)1对任意的正整数k,存在正整数N,当n>N时有, � Ia n -al<-,此是否可以作为k lim a n = a的定n➔oo 义?为什么? 1 解答可以一方面,若Jim 钰=a,那么对任意的正桴数k,取e=- > 0,则存在正整数1V,当n>N ')心k 时,有回-al<c: =-、k 1 另一方面,若对任意的正整数k,存在正整数N,当n>N时,有I仰-a|< -特别地,对任意的€> 0, l l k 任取大丁-的正整数ko,则存在正整数No,当九>No时.有I a n -al<—< e这就说明Jim a 九=a 0 k () 1➔OO 2求f(x)= X 旬x -11在[一1月上的极伯点与极伯解答当XE[一1,11[t,l ,有j(x)= X 灯1-x) = xi一xi,显然J(x)在[一1月上连续,在[一1,0)U (0月可导,且2压)=曰5 2 1 3 -- -卢=-曰(2-5x ).3 3由此可知土XE (-1 0)时2l'(x) < 0当X �2 (0; �)时f'(动>0,当x 2E q ,l )时f '(x )< 0所以f位)在(-1,0]严格递减在f 』严格递增)在[r 1]严格递减丁是0和5分别为J 的极小值占与极大值点且极小值为J (O)= 0,极大值为f (勹=:(:)令口但是3证明f(x)= cos产在(-:::,0,+00)上不一致连续解答取(-:::,0,+00)中的数列X n = ✓:玩兄加=v'2吓+1r(n=l,2,··),由于( -7f lim (X n -如)=lim � = 0. 九:=...oc ,~·,•. .,,., n ➔00 ✓芦+J2n7f十7f ,浊¥[j(Xn)-f(如)]=,抑�(cos(2n1r )一c os (2n1r + 1r)] = 2 =/= 0所以J位)仕(-oo,+oo)上不一致连续4设f(x)在[a,b]上至多有第一类间断点,证明:f(x)在(a,bJ上有界 D 解答对任意的1、oE [a, b ],由已知,J位)在xo处存在左极限与右极限(端点只考虑单侧极限),进而由极限的局部有界性,存在0:,:0>0与M 吓>0,使得`X E (xo -O re o'xo + D x o) n la, b ]时,有l f (x )I :s; M立。
第三章 逐次逼近法1.1内容提要1、一元迭代法x n+1=φ(x n )收敛条件为:1)映内性x ∈[a,b],φ(x) ∈[a,b] 2)压缩性∣φ(x) -φ(y)∣≤L ∣x-y ∣其中L <1,此时φ为压缩算子,在不断的迭代中,就可以得到最终的不动点集。
由微分中值定理,如果∣φ’∣≤L <1,显然它一定满足压缩性条件。
2、多元迭代法x n+1=φ(x n )收敛条件为:1)映内性x n ∈Ω,φ(x n ) ∈Ω 2)压缩性ρ(▽φ)<1,其中▽φ为x n 处的梯度矩阵,此时φ为压缩算子,在不断的迭代中,就可以得到最终的不动点集。
3、当φ(x )= Bx+f 时,收敛条件为,ρ(B )<1,此时x n+1= Bx n +f ,在不断的迭代中,就可以得到线性方程组的解。
4、线性方程组的迭代解法,先作矩阵变换 U L D A --=Jacobi 迭代公式的矩阵形式 f Bx b D x U L D x n n n +=++=--+111)(Gauss-Seidel 迭代公式的矩阵形式 f Bx b L D Ux L D x n n n +=-+-=--+111)()(超松弛迭代法公式的矩阵形式f Bx b L D x U D L D x k k k +=-++--=--+ωωωωω111)(])1[()(三种迭代方法当1)(<B ρ时都收敛。
5、线性方程组的迭代解法,如果A 严格对角占优,则Jacob 法和Gauss-Seidel 法都收敛。
6、线性方程组的迭代解法,如果A 不可约对角占优,则Gauss-Seidel 法收敛。
7、Newton 迭代法,单根为二阶收敛 2211'''21lim)(2)(lim---∞→+∞→--=-==--k k k k k k k k x x x x f f c x x ξξαα8、Newton 法迭代时,遇到重根,迭代变成线性收敛,如果知道重数m , )()('1k k k k x f x f m x x -=+仍为二阶收敛 9、弦割法)()())((111--+---=k k k k k k k x f x f x x x f x x 的收敛阶为1.618,分半法的收敛速度为(b-a )/2n-110、Aitken 加速公式11211112)(),(),(+----+-+--+---+---===k k k k k k k k k k k x x x x x x x x x x x ϕϕ1.2 典型例题分析1、证明如果A 严格对角占优,则Jacob 法和Gauss-Seidel 法都收敛。
第七章 非线性控制系统分析习题与解答7-1 设一阶非线性系统的微分方程为3x x x+-= 试确定系统有几个平衡状态,分析平衡状态的稳定性,并画出系统的相轨迹。
解 令 x=0 得 -+=-=-+=x x x x x x x 321110()()()系统平衡状态x e =-+011,,其中:0=e x :稳定的平衡状态;1,1+-=e x :不稳定平衡状态。
计算列表,画出相轨迹如图解7-1所示。
可见:当x ()01<时,系统最终收敛到稳定的平衡状态;当x ()01>时,系统发散;1)0(-<x 时,x t ()→-∞; 1)0(>x 时,x t ()→∞。
注:系统为一阶,故其相轨迹只有一条,不可能在整个 ~xx 平面上任意分布。
7-2 试确定下列方程的奇点及其类型,并用等倾斜线法绘制相平面图。
(1) x xx ++=0 (2) ⎩⎨⎧+=+=2122112x x xx x x解 (1) 系统方程为图解7-1 系统相轨迹⎩⎨⎧<=-+I I >=++I )0(0:)0(0:x x x x x x x x令0x x ==,得平衡点:0e x =。
系统特征方程及特征根:21,221,21:10,()2:10, 1.618,0.618()s s s s s s I II ⎧++==-±⎪⎨⎪+-==-+⎩稳定的焦点鞍点(, ) , , x f x x x x dxdxxx x dx dx x x x x x==--=--==--=-+=ααβ111⎪⎪⎩⎪⎪⎨⎧<-=>--=)0(11:II )0(11:I x x βαβα计算列表用等倾斜线法绘制系统相平面图如图解7-2(a )所示。
图解7-2(a )系统相平面图(2)xx x 112=+ ① 2122x x x+= ② 由式①: x xx 211=- ③ 式③代入②: ( )( )x x x x x 111112-=+- 即 x x x 11120--= ④ 令 x x110== 得平衡点: x e =0 由式④得特征方程及特征根为 ⎩⎨⎧-==--414.0414.20122,12λs s (鞍点) 画相轨迹,由④式x xdxdx x x x 1111112===+α xx 112=-α 计算列表用等倾斜线法绘制系统相平面图如图解7-2(b )所示。
请在左侧装订成册大连理工大学Array本科实验报告课程名称:电工学实验A/B(一)学院(系):专业:班级:学号:学生姓名:联系电话:2013 年~ 2014 年第1 学期实验项目列表姓名:学号:注意:3 学时实验请按下面时间上课(其他学时实验仍按教务处规定时间上课)第一节:(1.2节课)7:30 第二节:(3.4节课)10:05 第三节:(5.6节课)13:00 第四节:(7.8节课)15:30 第五节:(9.10节课)17:50 第六节:(11.12节课)20:00电工学实验须知一、选课要求实验选课前需确认在教务选课系统中选择该课程。
电工学实验实行网上选课,选课网址:http://58.155.210.208,请按选课时间上课,有特殊情况需事先请假,无故选课不上者按旷课处理,不给补做,缺实验者不给成绩。
二、预习要求1.课前认真阅读实验教程,复习相关理论知识,学习本节实验预备知识,回答相关问题。
按要求写好预习报告,注意实验内容有必做实验和选做实验;2.课前在实验报告中绘制电路原理图及实验数据表格(用铅笔、尺作图);3.课前在实验报告中列出所用实验设备及用途、注意事项(设备型号课后填写);4.设计性实验和综合性实验要求课前完成必要的电路设计和实验方案设计;5.没有预习报告或预习报告不合格者不允许做实验。
三、实验课上要求1.每个实验均须独立完成,抄袭他人数据记0分;2.认真完成实验操作和观测;3.所有实验记录均需指导教师确认(盖印),否则无效;4.请遵守《电工实验安全规则》。
四、实验报告1.请按实验教材中的要求提交预习报告;2.所有绘图必须用坐标纸绘图,并自行粘贴在报告上;3.没有按要求提交报告者不给成绩;4.抄袭报告记0分。
五、实验成绩评定(满分100分)1.实验课的考核方式:平时实验成绩70%+期末考核成绩30%。
平时成绩:完成必做实验任务满分记良好,完成必做实验任务和选做实验任务满分记优秀。
2.实验课考核成绩确定:平时实验成绩:预习20%+实际操作50%+实验总结+实验总结30%期末考核成绩:笔试40%+独立操作60%实验结束提交实验心得体会。
1)分叉图为:
程序为:
muv=0:0.002:3; %%%分叉参数
m=length(muv);
for k=1:m
mu=muv(k);
n=1000;x=zeros(n,1);x(1)=0.1;
for kk=2:n
x(kk)=mu*x(kk-1)*(1-x(kk-1)*x(kk-1)); %%%映射end
figure(5)
plot(zeros(50,1)+mu,x(301:350),'r.'); hold on; xlabel('a');ylabel('x_n');title('分叉图')
grid on
end
Lyapunov 图
程序为:
n=400;
xn=zeros(1,n);
aa=2.4:0.01:4;
N=1;
hold on ;box on ;xlim([min(aa),max(aa)]);
XL(1)=ylabel('\itx');
for a=aa;
x=0.1;
for q=1:80;
x=a*x*(1-x);
end
s=0;
for q=1:n;
xn(q)=x;
df=a-2*a*x;
s=s+log(abs(df));
x=a*x*(1-x);
end
L(N)=s/n;
N=N+1; 2.4 2.6 2.83 3.2 3.4 3.6 3.84
a
a,pause(0.01)
end
plot(aa,L);
hold on ;box on ;
grid on;
xlim([min(aa),max(aa)]);
2
求解方程13
1n n
n n n n x y y bx dy y ++=⎧⎪⎨=-+-⎪⎩ 可得到固定点 ()()11,0,0x y = 当10d b -->时,
(
)22,y x =,(
)(33,y x =,
求得特征值表达式为
, 利用相图,观察strange attractor :
当b=0.2,d=2.5或2.65时,不存在奇异吸引子;
当b=0.2,d=2.77时,存在奇异吸引子,奇异吸引子图为:
234)3(222d y b d y ----±=
λ
程序为:
clear all
N=1000;
b=0.2;
d=2.5;
q=1;
for k=1:N;
x=zeros(1,N);
y=zeros(1,N);
x(1)=rand;
y(1)=rand;
for L=1:N-1;
x(L+1)=y(L);
y(L+1)=2.77*y(L)-0.2*x(L)-y(L)*y(L)*y(L);
end
if abs(x(end))<2; % if abs(x(end))<2;
Xp(q)=x(end);
Yp(q)=y(end);
q=q+1;
end
end
% Draw figure for Henon maping:
figure(1); plot(Xp,Yp,'b.','markersize',3);
grid on;
xlabel('x_n');
ylabel('y_n');
title('Strange attractor')
2)当b=0.2,d=2.77时,对于平衡点(1.2530,1.2530),调节参数d,
Jacobi矩阵为
01
-0.2-1.94
æ
èç
ö
ø÷,
其特征值为l s=-0.1092,l u=-1.8307,
其中g=
¶x
F
¶p
¶y
F
¶p
æ
è
ç
ö
ø
÷=
1.2530
æ
èç
ö
ø÷
,
f u =
l
u
-l
s
)
-l
u
-l
s
)ù
û
l
s
æ
è
ç
ç
ç
ö
ø
÷
÷
÷
=
-1.2117
-0.1323
æ
èç
ö
ø÷
,
K=
l
u
l
u
-1
f
u
T
f
u
T g
= 4.72640.5161
()
,
控制律为d
n =2.77+4.7264(x
n
-1.2530)+0.5161(y
n
-1.2530);
3)由于d=2.65,b=0.2时,系统为Period-4的周期轨道,由Lyapunov exponent的性质可知,周期性对应的指数l
1
=0,
又l
1+l
2
=log(det J)=log(b)=-1.6094,所以l
2
=-1.6094。
3.
1)因为该系统的Lyapunov exponent有大于0和小于0的指数。
大于0的指数使系统进入混沌,小于0的指数使不同初始值的轨道相互吸引。
所以形成奇异吸引子。
固定a,b,变化c,得到相应的相图,观察吸引子:
C=1相迹图
程序为:
t0=[0,40];
[t,x]=ode45('rossler',t0,[0,0,0]);
subplot(1,2,1);
plot(t,x(:,1),'y',t,x(:,2),'g',t,x(:,3),'b'); title('x 黄色 y 绿色 z 蓝色') ;
xlabel('t');
subplot(1,2,2);
plot3(x(:,1),x(:,2),x(:,3))
title('c=1相图');
xlabel('x');ylabel('y');zlabel('z');
% pause
function r=rossler(t,x)
a=0.25;
b=1;
c=1;
r=[-x(2)-x(3);x(1)+a*x(2);b+x(3)*(x(1)-c)];
end
C=6相迹图
程序为:
t0=[0,40];
[t,x]=ode45('rossler',t0,[0,0,0]);
subplot(1,2,1);
plot(t,x(:,1),'y',t,x(:,2),'g',t,x(:,3),'b'); title('x 黄色 y 绿色 z 蓝色') ;
xlabel('t');
subplot(1,2,2);
plot3(x(:,1),x(:,2),x(:,3))
title('c=6相图');
xlabel('x');ylabel('y');zlabel('z');
% pause
function r=rossler(t,x)
a=0.25;
b=1;
c=6;
r=[-x(2)-x(3);x(1)+a*x(2);b+x(3)*(x(1)-c)]; end
2)分岔图:由方程组可以得到c 与x,y,z 间的表达式为
,
分岔图为:
3)
当c=5.5时,解得l 1=0.064285,l 2=0.015416,l 3=-5.103405; lyapunov 指数谱图为:
414114z z x x y y c +=+=--
=。