第二章直流拖动
- 格式:ppt
- 大小:1.43 MB
- 文档页数:78
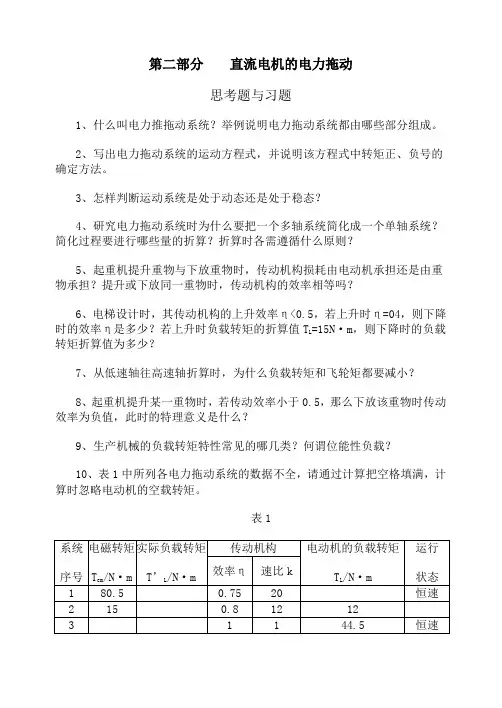
第二部分直流电机的电力拖动思考题与习题1、什么叫电力推拖动系统?举例说明电力拖动系统都由哪些部分组成。
2、写出电力拖动系统的运动方程式,并说明该方程式中转矩正、负号的确定方法。
3、怎样判断运动系统是处于动态还是处于稳态?4、研究电力拖动系统时为什么要把一个多轴系统简化成一个单轴系统?简化过程要进行哪些量的折算?折算时各需遵循什么原则?5、起重机提升重物与下放重物时,传动机构损耗由电动机承担还是由重物承担?提升或下放同一重物时,传动机构的效率相等吗?6、电梯设计时,其传动机构的上升效率η<0.5,若上升时η=04,则下降=15N·m,则下降时的负载时的效率η是多少?若上升时负载转矩的折算值TL转矩折算值为多少?7、从低速轴往高速轴折算时,为什么负载转矩和飞轮矩都要减小?8、起重机提升某一重物时,若传动效率小于0.5,那么下放该重物时传动效率为负值,此时的特理意义是什么?9、生产机械的负载转矩特性常见的哪几类?何谓位能性负载?10、表1中所列各电力拖动系统的数据不全,请通过计算把空格填满,计算时忽略电动机的空载转矩。
表14 17.6 128 0.85 85 78 5.5 16.5 减速11、表2所列电动机拖动生产机械在稳态运行时,根据表中所给数据,忽略电动机的空载转矩,计算表内未知数据并填入表中。
表2生产机械切削力或重物重F,G/N切削速度或升降速度v/m·s-1电动机转速n/r·min传动效率负载转矩TL/N·m电磁转矩Tem/N·m刨床3400 0.42 975 0.80 起重机9800 提升1.4 1200 0.75下降1.4电梯1500 提升1.0 950 0.42下降1.012、如图所示的运动系统中,已知n1/n2=3,n2/n3=2, GD21=80N·m2,GD22=250N·m2,GD 23=750 N·m2,I’L=90 N·m2,(反抗转矩),每对齿轮的传支效率均为η=0.98,求折算到电动机轴上的负载转长和总飞轮矩。
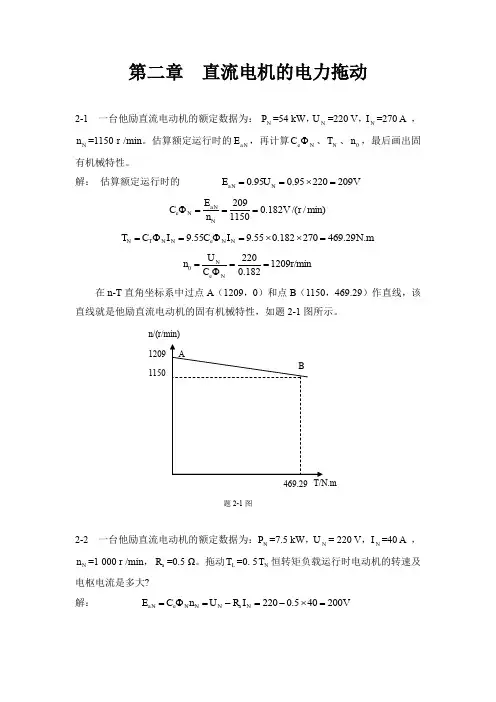
第二章 直流电机的电力拖动2-1 一台他励直流电动机的额定数据为: N P =54 kW ,N U =220 V ,N I =270 A , N n =1150 r /min 。
估算额定运行时的aN E ,再计算N e C Φ、N T 、0n ,最后画出固有机械特性。
解: 估算额定运行时的 V 20922095.095.0=⨯==N aN U Emin)/r /(V 182.01150209===ΦN aN N e n E C N.m 29.469270182.055.955.9=⨯⨯=Φ=Φ=N N e N N T N I C I C Tr/min 1209182.02200==Φ=N e N C U n 在n -T 直角坐标系中过点A (1209,0)和点B (1150,469.29)作直线,该直线就是他励直流电动机的固有机械特性,如题2-1图所示。
2-2 一台他励直流电动机的额定数据为:N P =7.5 kW ,N U = 220 V ,N I =40 A ,N n =1 000 r /min ,a R =0.5 Ω。
拖动L T =0. 5N T 恒转矩负载运行时电动机的转速及电枢电流是多大?解: V 200405.0220=⨯-=-=Φ=N a N N N e aN I R U n C En /(r/min)1209 1150 T/N.m469.29 题2-1图1V/r.min 2.01000200-===ΦN aN N e n E C r/min 11002.02200==Φ=N e N C U n 由a N T I C T Φ=可知,当L T =0.5N T 时,A 20405.05.0=⨯==N a I Ir/min 10505011002.0205.0110000=-=⨯-=Φ-=∆-=a N e a I C R n n n n2-3 写出题2-3图所示各种情况下系统的运动方程,并说明系统的运行状态。
电机与拖动绪论一、名词解释1. 磁场:电流周围的效应2.磁动势(磁通势、磁势):产生磁场的源泉3.磁场强度:表征距离磁源即磁动势一定位置的地方,磁动势影响强度的一个物理量。
4.磁场感应强度(磁通密度):表征距离磁源即磁动势一定位置的地方,磁动势感应能力强弱的一个物理量。
5.磁通量Φ:垂直穿过某一截面(面积为S)磁力线的数目6.磁阻:就是磁力线通过磁路时所遇到的阻碍,磁阻与磁路的长度成正比,与磁路的磁导率成反比,并与磁路的截面积成反比7电感:其实质表征的就是电磁装置电与磁转换能力的大小。
二、填空1、在电机中磁场的几个常用量分别是磁动势、磁场强度、磁感应强度、磁通等。
2、进行磁路分析和计算时,常用到磁路的基本定律有全电流定律、磁路的欧姆定律、磁路的基尔霍夫定律。
3、电机的电流有交、直流之分,所以,旋转电机也有直流电机与交流电机两大类。
4、旋转电机是一种机电能量转换的机电装置。
5、把电能转换机械能的电机称为电动机; 把机械能转换电能的电机称为电发电机。
三、判断题1、垂直穿过线圈的磁通量随时间变化,必然会在线圈中产生感应电动势。
(√)2、棱次定律表明垂直穿过线圈的变化磁通,会在线圈中产生电动势。
(√)3、棱次定律表明线圈中的感生磁场的方向始终是与原磁场变化率的方向一致的。
(×)4、棱次定律表明线圈中的感生磁场的方向始终是与原磁场方向一致的。
(×)六、问答题 1.电磁作用原理的综述有电流必定产生磁场,即“电生磁” ;磁场变化会在导体或线圈中产生感应电动势,即“动磁生电” ;载流导体在磁场中要受到电磁力的作用,即“电磁生力”第一章直流电机的原理与结构一、名词解释(一)1.电枢:在电机中能量转换的主要部件或枢纽部分2.换向:直流电机电枢绕组元件从一条支路经过固定不动的电刷短路,后进入另一条支路,元件中的电流方向改变的过程。
3.额定值:在正常的、安全的条件下,电气设备所允许的最大工作参数。
(二) 1.电机:机电能量(或机电信号)转换的电磁装置2.直流电机:直流电能与机械能量进行转换的电磁装置3.直流发电机:把机械能量转换为直流电能的电磁装置4.直流电动机:把直流电能转换为机械能量的电磁装置5.交流电机:交流电能与机械能量进行转换的电磁装置6.交流电动机:把交流电能转换为机械能量的电磁装置7.交流发电机:把机械能量转换为交流电能的电磁装置(三)第一节距:同一元件的两个元件边在电枢圆周上所跨的距离(四)极距:相邻两个磁极轴线之间的距离(五)电角度:磁场在空间变化一周的角度表示二、填空1、铁心损耗一般包括磁滞损耗、涡流损耗。
第二章直流电机2.1直流电机的基本工作原理及结构一、基本工作原理(一)直流电机的构成(1)定子:主磁极、换向磁极、机座、端盖、电刷装置;(2)转子:电枢铁心、电枢绕组、换向装置、风扇、转轴(3)气隙**注意:同步电机—旋转磁极式;直流电机—旋转电枢式。
1.直流发电机的工作原理:实质上是一台装有换向装置的交流发电机;(1)原理:导体切割磁力线产生感应电动势(2)特点:e=BLV;a、电枢绕组中电动势是交流电动势b、由于换向器的整流作用,电刷间输出电动势为直流(脉振)电动势c、电枢电动势——原动势;电磁转矩——阻转矩(与T、n反向)2.直流电动机的工作原理:实质上是一台装有换向装置的交流电动机;(1)原理:带电导体在磁场中受到电磁力的作用并形成电磁转矩,推动转子转动起来(2)特点:f=BiLa、外加电压并非直接加于线圈,而是通过电刷和换向器再加到线圈b、电枢导体中的电流随其所处磁极极性的改变方向,从而使电磁转矩的方向不变。
c、电枢电动势——反电势(与I反向);电磁转矩——驱动转矩(与n同向)**说明:直流电机是可逆的,它们实质上是具有换向装置的交流电机。
3、脉动的减小——电枢绕组由许多线圈串联组成(二)直流电机的基本结构1、主磁极——建立主磁场(N、S交替排列)a、主极铁心——磁路,由1.0~1.5mm厚钢板构成b、励磁绕组——电路、由电磁线绕制2、机座——磁路的一部分(支承)框架,钢板焊接或铸刚3.电枢铁心——磁路,0.5mm厚硅钢片叠压而成(外圆冲槽)4.电枢绕组——电路。
电磁线绕制(闭合回路,由电刷分成若干支路)换向器——换向片间相互绝缘(用云母或塑料)电刷装置a、电刷——石墨或金属石墨b、刷握、刷杆、连线(铜丝辨)5.换向极——改善换向,由铁心、绕组构成(放置于主极之间或绕组与电枢绕组串联)(三)励磁方式1.定义:主磁极的激磁绕组所取得直流电源的方式;2.分类:以直流发电机为例分为:他励式和自励式(包括并励式、串励式和复励式)他励:激磁电流较稳定;并励:激磁电流随电枢端电压而变;串励:激磁电流随负载而变,由于激磁电流大,激磁绕组的匝数少而导线截面积较大;复励:以并激绕组为主,以串激绕组为辅。

《电力拖动自动控制系统》-第二章转速、电流双闭环直流调速系统和调节器的工程设计方法第二章转速、电流双闭环直流调速系统和调节器的工程设计方法内容提要:转速、电流双闭环控制的直流调速系统是应用最广性能很好的直流调速系统。
本章着重阐明其控制规律、性能特点和设计方法,是各种交、直流电力拖动自动控制系统的重要基础。
我们将重点学习:●转速、电流双闭环直流调速系统及其静特性●双闭环直流调速系统的数学模型和动态性能分析●调节器的工程设计方法●按工程设计方法设计双闭环系统的调节器●弱磁控制的直流调速系统2.1 转速、电流双闭环直流调速系统及其静特性问题的提出:第1章中表明,采用转速负反馈和PI调节器的单闭环直流调速系统可以在保证系统稳定的前提下实现转速无静差。
但是,如果对系统的动态性能要求较高,例如:要求快速起制动,突加负载动态速降小等等,单闭环系统就难以满足需要。
1. 主要原因是因为在单闭环系统中不能随心所欲地控制电流和转矩的动态过程。
在单闭环直流调速系统中,电流截止负反馈环节是专门用来控制电流的,但它只能在超过临界电流值 Idcr 以后,靠强烈的负反馈作用限制电流的冲击,并不能很理想地控制电流的动态波形。
2.理想的启动过程a) 带电流截止负反馈的单闭环调速系统b) 理想的快速起动过程 2-1直流调速系统起动过程的电流和转速波形性能比较:带电流截止负反馈的单闭环直流调速系统起动过程如图所示,起动电流达到最大值Idm 后,受电流负反馈的作用降低下来,电机的电磁转矩也随之减小,加速过程延长。
理想起动过程波形如图所示,这时,起动电流呈方形波,转速按线性增长。
这是在最大电流(转矩)受限制时调速系统所能获得的最快的起动过程。
3. 解决思路为了实现在允许条件下的最快起动,关键是要获得一段使电流保持为最大值Idm的恒流过程。
按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么,采用电流负反馈应该能够得到近似的恒流过程。
第二章双闭环直流调速系统2-1在转速、电流双闭环调速系统中,若要改变电动机的转速,应调节什么参数?改变转速调节器的放大倍数行不行?改变电力电子变换器的放大倍数行不行?改变转速反馈系数行不行?若要改变电动机的堵转电流,应调节系统中的什么参数?答:改变电机的转速需要调节转速给定信号Un※;改变转速调节器的放大倍数不行,改变电力电子变换器的放大倍数不行。
若要改变电机的堵转电流需要改变ASR的限幅值。
2-2(1(2(1(2(3(42-3是多少?答:=βId=Ui,Uc=U d02-4如果转速、电流双闭环调速系统的转速调节器不是PI调节器,而是比例调节器,对系统的静、动态性能会有什么影响?答:若采用比例调节器可利用提高放大系数的办法使稳态误差减小即提高稳态精度,但还是有静差的系统,但放大倍数太大很有可能使系统不稳定。
2-5在转速、电流双闭环系统中,采用PI调节器,当系统带额定负载运行时,转速反馈线突然断线,系统重新进入稳态后,电流调节器的输入偏差电压△Ui是否为0,为什么?答:反馈线未断之前,Id=In,令n=n1,当转速反馈断线,ASR迅速进入饱和,Un※=Un※max,Uc↑,Id↑至Idm,Te>T l,n↑,Id↓,△Ui出现,Id↑至Idm,n↑,Id↓,此过程重复进行直到ACR饱和,n↑,Id↓,当Id=In,系统重新进入稳态,此时的速度n2>n1,电流给定为Un※max=Idmaxβ>电流反馈信号Un=Inβ,偏差△Ui不为0。
2-6在转速、电流双闭环系统中,转速给定信号Un※未改变,若增大转速反馈系数α,系统稳定后转速反馈电压Un是增加还是减少还是不变?为什么?答:Un不变,因为PI调节器在稳态时无静差,即:Un※=Un,Un※未改变,则,Un也不变。
2-7Unm*试求:(1(2解:(1α=Unm*(22-8Uim=8V(1)Ui(2)Uc解:(1电流为电流为(2)Uc增加。
2-9在双闭环直流调速系统中,电动机拖动恒转矩负载在额定工作点正常运行,现因某种原因电动机励磁下降一半,系统工作情况将会如何变化?(λ=1.5)答:设突发状况之前的磁通为?1,令此时的磁通为?2,之前的电磁力矩为Te1,此刻的电磁力矩为Te2,负载转矩恒为T l,电机励磁下降一半,则?2=0.5?1,Te2=Cm(?2)Id=0.5Te1<T l,n↓,Id↑甚至到Idm,Te2=Cm(?2)Idm=0.75Te1<T l,n会一直下降到0。