计算伺服电机负载转矩
- 格式:doc
- 大小:22.50 KB
- 文档页数:1

伺服电机负载转矩计算公式伺服电机在工业自动化领域中可是个相当重要的角色,而要搞清楚它的负载转矩计算公式,咱们得一步步来。
先来说说啥是负载转矩。
想象一下,你正在费力地推动一个大箱子,这个让你感到费劲的“力”,在电机的世界里,就可以理解为负载转矩。
那伺服电机的负载转矩到底咋算呢?一般来说,它可以通过下面这个公式来计算:负载转矩 = (摩擦力×半径) + (惯性转矩)这里面的摩擦力和半径比较好理解。
就比如说,一辆自行车的轮子,轮子和地面之间的摩擦力,还有轮子的半径,就能算出一部分转矩。
惯性转矩就稍微复杂点啦。
这就好像你要让一个静止的大转盘转起来,一开始得费很大的劲儿,这就是因为有惯性的存在。
给大家讲个我自己的经历。
有一次,我在工厂里看到一台机器出了故障,师傅们在那着急忙慌地找问题。
我凑过去一看,发现就是伺服电机的负载转矩出了差错。
他们按照以前的经验来设置,结果机器运行得磕磕绊绊的。
我就跟他们说,得重新算一下负载转矩。
我们先仔细检查了机器各个部件之间的摩擦力,测量了相关部件的半径。
然后,对于惯性转矩,我们得搞清楚转动部件的质量、形状还有转动速度的变化。
这可真是个细致活儿,一点都不能马虎。
经过一番努力,终于算出了新的负载转矩值。
调整之后,那台机器就像被施了魔法一样,顺畅地运行起来啦!在实际应用中,还有很多因素会影响负载转矩的计算。
比如工作环境的温度变化,会导致部件的摩擦系数改变;还有机器的运行速度不稳定,也会让惯性转矩的计算变得更复杂。
所以啊,要准确计算伺服电机的负载转矩,不仅要熟悉公式,还得对具体的工作场景有深入的了解。
每一个参数都得仔细琢磨,不能有一点儿马虎。
总之,搞清楚伺服电机负载转矩的计算公式,对于让机器高效稳定地运行,那可是至关重要的。
希望大家在实际操作中都能算得准准的,让机器乖乖听话,为我们好好干活!。

伺服电机的转矩惯量计算公式伺服电机的转矩惯量计算公式在探讨伺服电机的转矩和惯量计算公式之前,我们先来了解一下什么是伺服电机。
伺服电机是一种能够精准控制位置、速度和加速度的电机,通常被广泛应用于自动化设备、机器人、数控机床等领域。
它具有高速度、高精度和高可靠性的特点,因此在工业生产中扮演着非常重要的角色。
1. 伺服电机的转矩伺服电机的转矩是指电机在运动时所产生的力矩,通常用来描述电机的输出能力。
伺服电机的转矩大小直接影响着其可驱动的负载,因此在实际应用中,我们需要准确地计算出伺服电机的转矩。
在伺服电机的转矩计算中,有一个重要的概念需要引入,那就是转矩常数。
转矩常数是描述电机输出转矩与输入电流之间关系的参数,通常用KT表示。
它的单位是N·m/A,表示在给定电流下电机能够输出的转矩大小。
转矩常数的计算方法是通过实际测试得到的,可以通过将电机固定在特定的支架上,给定一定的电流,测量电机输出的转矩大小,然后通过计算得到转矩常数。
在实际应用中,获取准确的转矩常数对于伺服电机的控制非常重要。
2. 伺服电机的惯量在伺服电机的转矩计算中,还有一个重要的参数需要引入,那就是惯量。
惯量是描述物体抵抗运动状态改变的能力,通常用J表示,单位是kg·m²。
对于伺服电机来说,惯量越大,表示电机对于速度和位置的改变越难,因此其加速度和减速度就会越小。
在伺服电机的惯量计算中,通常有两种情况需要考虑,一种是转动惯量,另一种是质量惯量。
转动惯量描述了物体绕其旋转轴旋转的惯性,通常用Jr表示;而质量惯量描述了物体对于线性运动的惯性,通常用Jm表示。
在实际应用中,我们需要根据伺服电机的实际结构和运动方式来计算出相应的惯量值。
3. 伺服电机的转矩惯量计算公式在实际应用中,我们需要根据伺服电机的转矩和惯量参数来计算其所需的控制参数,从而实现精准的控制。
伺服电机的转矩和惯量计算公式如下:控制所需的转矩 = 负载转矩 + 加速度转矩 + 摩擦转矩 + 重力转矩其中,负载转矩表示外部负载对电机所产生的转矩,通常由实际应用中的载荷参数计算得到;加速度转矩表示电机在加速和减速过程中产生的转矩,可以通过伺服电机的惯量和加速度参数来计算得到;摩擦转矩表示电机在运动中克服摩擦力所产生的转矩;重力转矩表示电机在垂直方向上所受到的重力影响所产生的转矩。
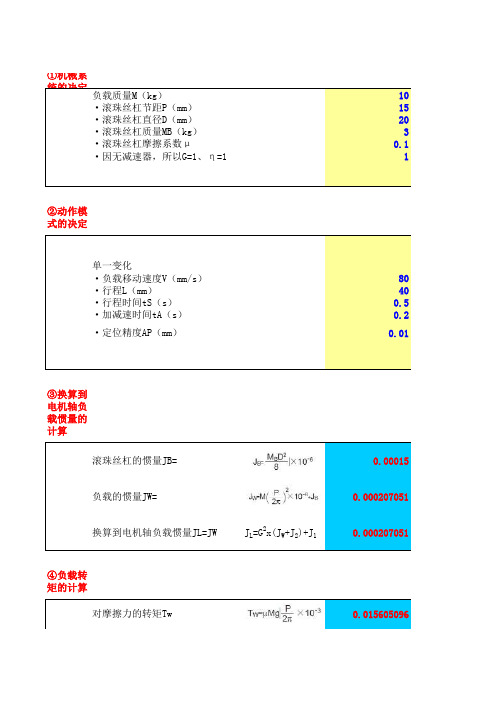

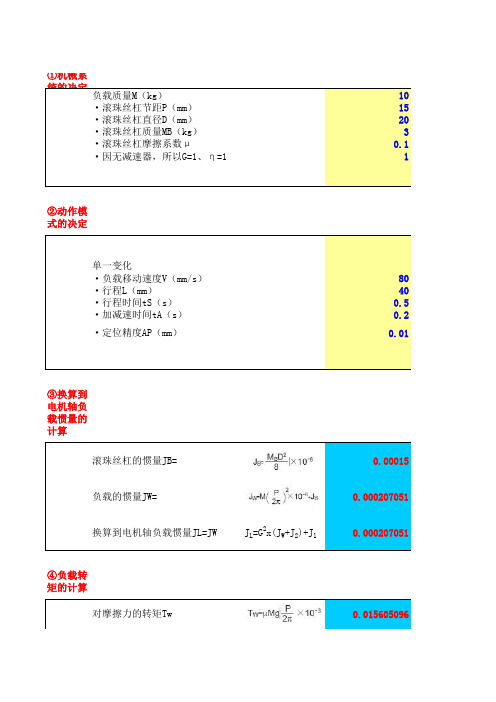
一、计算折合到电机上的负载转矩的方法如下:1、水平直线运动轴:9.8*μ·W·P BT L=2π·R·η(N·M)式P B:滚珠丝杆螺距(m)μ:摩擦系数η:传动系数的效率1/R:减速比W:工作台及工件重量(KG)2、垂直直线运动轴:9.8*(W-W C)P BT L=2π·R·η(N·M)式W C:配重块重量(KG)3、旋转轴运动:T1T L=R·η(N·M)式T1:负载转矩(N·M)二:负载惯量计算与负载转矩不同的是,只通过计算即可得到负载惯量的准确数值。
不管是直线运动还是旋转运动,对所有由电机驱动的运动部件的惯量分别计算,并按照规则相加即可得到负载惯量。
由以下基本公式就能得到几乎所有情况下的负载惯量。
1、柱体的惯量D(cm)L(cm)由下式计算有中心轴的圆柱体的惯量。
如滚珠丝杆,齿轮等。
πγD4L(kg·cm·sec2)或πγ·L·D4(KG·M2)J K=32*980J K=32式γ:密度(KG/CM3)铁:γ〧7.87*10-3KG/CM3=7.87*103KG/M3铝:γ〧2.70*10-3KG/CM3=2.70*103KG/M3JK:惯量(KG·CM·SEC2)(KG·M2)D:圆柱体直径(CM)·(M)L:圆柱体长度(CM)·(M)2、运动体的惯量用下式计算诸如工作台、工件等部件的惯量WP B2J L1=9802π(KG·CM·SEC2)P B2=W2π(KG·M2)式中:W:直线运动体的重量(KG)PB:以直线方向电机每转移动量(cm)或(m)3、有变速机构时折算到电机轴上的惯量1、JJOZ1KG ·CN :齿轮齿数 Z 12 JL1=Z 2*J 0(KG ·CM ·SEC 2)(KG ·M 2) 三、运转功率及加速功率计算在电机选用中,除惯量、转矩之外,另一个注意事项即是电机功率计算。

一、计算折合到电机上的负载转矩的方法如下:1、水平直线运动轴:9. 8* 卩• W • P BT L=2n • R • n ( N • M) 式P B:滚珠丝杆螺距(m)U :摩擦系数n :传动系数的效率1/R:减速比W:工作台及工件重量(KG)2、垂直直线运动轴:9.8* (W-Wc) P BT2 JI ■—L=式%配重块重量(KG)3、旋转轴运动:T1TL=R • q ( N • M)式T1:负载转矩(N・M)二:负载惯量计算与负载转矩不同的是,只通过计算即可得到负载惯量的准确数值。
不管是直线运动还是旋转运动,对所有由电机驱动的运动部件的惯量分别计算,并按照规则相加即可得到负载惯量。
由以下基本公式就能得到几乎所有情况下的负载惯量。
1、柱体的惯量't-'t'kg' • cm • sec2)或皿Y • L • D (KG • M)JT丫DJ K二32*980J式Y:密度(KG/CM3)铁:丫±7.87*10 _3KG/CM3=7. 87*103KG/M3铝:丫±2. 70*10「'KG/CM'二2. TO^IOWM3JK:惯量(KG • CM • SEC2) (KG • M)圆柱体直径(CM) • (M)L :圆柱体长度(CM ) • (W 2、运动体的惯量用下式计算诸如工作台、工件等部件的惯量式中:W 直线运动体的重量(KG )PB :以直线方向电机每转移动量(cm )或(ni )3、有变速机构时折算到电机轴上的惯量1、JL1 二Z2*J° ( KG • CM • SEC) (KG • M 三、运转功率及加速功率计算在电机选用中,除惯量、转矩之外,另一个注意事项即是电机功率计算。
一般可按下式求得。
1、转功 -------------2 兀• Nm • T LPo=6O (W )式中:PO :运转功率(酚Nm :电机运行速度(rpm )TL :何载转矩(N ・F2、速功率计算 ___________2兀• NnJLKG • CN :齿轮齿数222)Z1式Pd:加速功率(妙Nm:电机运行速度(rpm)2J1:负载惯性(KG-M)Ta:加速时间常数(sec)电机扭矩计算公式旋转物体的扭矩计算公式T=9550P/nP是功率,单位是kW, n是转速,单位是转/分,r/min扭矩单位为Nm功率二力*速度p 二F*v—-公式1转矩(T)二扭力(F)*作用半径(R) ----------- 推出F二T/R-一公式2线速度(V)二2 Ji R*每秒转速(n秒)二2 n R*每分转速(n分)/60= n R*n分/30---公式3将公式2、3代入公式1得:P二F*V二T/R* Ji R*n分/30二肌/30*T*n分- P二功率单位W, T二转矩单位Nm, n分二每分钟转速单位转/分钟如果将P的单位换成KW,那么就是如下公式:P*1000二Ji /30*T*n30000/ Ji *P=T*n30000/3. 1415926*P=T*n9549.297*P=T*n伺服电机扭矩计算公式:伺服五機扭矩計畀公式:F*R •(減速比戶T(扭矩)比如:偌動IOOKG的物惴・R-5OMM・減速比為I: 50計算為:100*9.8 (逼力加速度)*0.05*0.02=0.98 (N.M)。
伺服电机选型计算实例伺服电机是一种控制器控制的电机,具有高精度和高速度的特点,广泛应用于机械设备中。
在选型伺服电机时,需要考虑多个参数来满足具体的应用要求。
下面以一个选型计算实例来详细介绍伺服电机的选型过程。
假设我们需要选型一台伺服电机用于驱动一个线传动机构,具体要求如下:1.最大负载力为2000N,工作速度范围为0-10m/s。
2. 线传动机构的负载惯量为500kg·m²。
3. 需要保证驱动精度在±0.2mm范围内。
4.工作环境温度范围为0-40℃。
首先,我们需要计算所需的转矩。
根据公式:转矩=负载力×工作半径,其中工作半径等于线传动机构的负载惯量÷2、由于我们没有具体的线传动机构参数,假设负载惯量为500kg·m²,即工作半径为0.25m。
则最大转矩=2000N×0.25m=500N·m。
考虑到一般情况下,峰值转矩为最大转矩的2倍,即1000N·m。
接下来,我们需要计算伺服电机的速度要求。
根据给定的工作速度范围0-10m/s,我们可以选择合适的额定转速。
假设我们选择的额定转速为2000rpm,则转速范围为0-2000rpm。
考虑到加速度和减速度的要求,一般额定转速的选择会略高于平均线速度,假设为2200rpm。
接下来,我们需要选择合适的伺服电机型号。
在选型之前,我们还需要考虑工作环境的温度范围。
根据给定的工作环境温度范围为0-40℃,我们需要选择具备合适温度范围的伺服电机。
一般伺服电机的温度范围为0-50℃,因此我们可以选择标准型号的伺服电机。
在选择伺服电机型号时,我们需要参考厂家提供的电机性能参数。
主要包括额定转矩、额定转速、额定电压、额定电流、额定功率等。
根据我们的要求,我们可以对比不同型号的伺服电机并选择合适的型号。
最后,我们需要根据具体应用需求考虑伺服电机的控制方式、接口类型以及其他附件等。
伺服电机选型计算公式伺服电机选型计算公式是指通过一系列的计算公式来确定伺服电机的合适参数,以满足特定需求。
伺服电机选型的主要目标是确定伺服电机的额定转矩、额定电流、额定功率等参数,以及选择合适的伺服驱动器。
下面将介绍一些常用的伺服电机选型计算公式。
1.负载的转矩计算公式:负载的转矩是伺服电机选型的基础,通过计算负载的转矩,可以确定伺服电机的额定转矩。
负载的转矩可以通过以下公式计算:负载转矩=(负载力*负载半径)/(传动效率*减速比)2.伺服电机的额定转矩计算公式:伺服电机的额定转矩是指在额定转速下,电机能够提供的最大转矩。
额定转矩可以通过以下公式计算:额定转矩=(负载转矩+加速扭矩)/传动效率3.伺服电机的额定电流计算公式:伺服电机的额定电流是指在额定转矩下,电机所需的额定电流。
额定电流可以通过以下公式计算:额定电流=额定转矩*电流系数/额定转速4.伺服电机的额定功率计算公式:伺服电机的额定功率是指在额定转矩和额定转速下,电机所提供的对外功率。
额定功率可以通过以下公式计算:额定功率=额定转矩*额定转速/9.555.伺服驱动器的额定功率计算公式:伺服驱动器的额定功率是指驱动器所能提供的最大功率。
额定功率可以通过以下公式计算:额定功率=伺服电机的额定功率/驱动器的效率除了上述几个常用的伺服电机选型计算公式外,还需要考虑一些其他因素,例如:负载的加速时间、负载的惯性矩、伺服系统的控制精度等,这些因素都会对伺服电机的选型产生影响,需要综合考虑。
同时,还需要根据具体的应用环境和需求,选择合适的伺服电机和驱动器型号,以确保系统的性能和可靠性。
需要注意的是,伺服电机选型计算公式只是一个参考,实际选型过程中还需要考虑一系列的工程参数和实际情况,同时也需要借助一些专业的伺服电机选型软件,以更准确地确定伺服电机的参数。
伺服电机计算完整版伺服电机是一种可以实现高精度运动控制的电机。
它采用了闭环控制系统,通过反馈信号不断调整输出,以实现对位置、速度和加速度的精确控制。
伺服电机在自动化控制、工业机械、机器人等领域有着广泛的应用。
伺服电机的运动控制可以通过数学模型来描述。
一般情况下,可以将伺服电机的运动控制建模为一个二阶系统。
在建立数学模型之前,需要了解一些关键参数,包括电机的转矩常数Kt、电机的动态阻尼比ζ、滤波器的角频率ωn以及PID控制器的增益参数Kp、Ki和Kd。
伺服电机的数学模型可以用以下差分方程来描述:Tm*(θm(k+1)-θm(k))/T=Kt*(Ti/R)*Vi(k)-Td*(θm(k)-θ(k))J*(θ(k+1)-2θm(k)+θ(k-1))/T^2=T*(θm(k+1)-θm(k))/T其中,Tm为电机的转矩,θm(k)为电机的角度,Vi(k)为控制输入,Ti和R分别为电机的转矩常数和电阻,Td为电机的动态阻尼比,J为负载的转动惯量,θ(k)为负载的角度,T为采样周期。
根据以上差分方程,可以推导得到伺服电机的传递函数:G(s)=(Kt*(Ti/R))/(J*s^2+(Td+J)*s+(Kt*(Ti/R)))可以根据传递函数来设计伺服电机的控制器。
一种常见的控制器设计方法是PID控制,它是通过对误差进行比例、积分和微分处理来调整输出。
PID控制器的输出可以表示为:U(s)=Kp*e(s)+Ki*1/s*e(s)+Kd*s*e(s)其中,U(s)为控制器的输出,Kp、Ki和Kd分别为比例、积分和微分增益参数,e(s)为误差信号,s为Laplace变换中的频率变量。
通过将传递函数和控制器的输出进行连接,可以得到整个系统的传递函数:T(s)=G(s)*U(s)=(Kt*(Ti/R))/(J*s^2+(Td+J)*s+(Kt*(Ti/R)))*(Kp*e(s)+Ki*1/s*e(s)+Kd*s*e(s))根据传递函数T(s),可以进行系统的频域和时域分析,以评估系统的稳定性和动态性能。
计算伺服电机负载转矩
在选购伺服电机时担心切削力不够,往往选择较大规格的马达,这不但会增加机床的制造成本,而且使之体积增大,结构布局不够紧凑。
原则上应该根据负载条件来选择伺服电机,在电机轴上所有的负载有两种,即阻尼转矩和惯量负载。
这两种负载都要正确地计算,其值应满足下列条件:
1、当机床作空载运行时,在整个速度范围内,加在伺服电机轴上的负载转矩应在电机连续额定转矩范围内,即应在转矩速度特性曲线的连续工作区。
2、较大负载转矩,加载周期以及过载时间都在提供的特性曲线的准许范围以内。
3、伺服电机在加速/减速过程中的转矩应在加减速区(或间断工作区)之内。
4、对要求频繁起,制动以及周期性变化的负载,必须检查它的在一个周期中的转矩均方根值。
并应小于电机的连续额定转矩。
5、加在伺服电机轴上的负载惯量大小对电机的灵敏度和整个伺服系统的精度将产生影响。
通常,当负载小于电机转子惯量时,上述影响不大。