振动盘基础知识 -直线送料器简介
- 格式:ppt
- 大小:1.89 MB
- 文档页数:6
振动盘技术协议书范本《振动盘技术协议书》甲方(买方):____________乙方(卖方):____________根据《中华人民共和国合同法》及相关法律法规的规定,甲乙双方在平等、自愿、公平、诚实信用的原则基础上,就振动盘技术的转让和技术服务事宜,达成如下协议:一、技术转让内容1.1 乙方将其所拥有的振动盘技术(以下简称“技术”)转让给甲方,包括但不限于振动盘的设计、制造、安装、调试、维护等方面的技术资料、操作手册、软件程序等。
1.2 乙方应确保所转让的技术完整、真实、有效,且不侵犯任何第三方的知识产权。
二、技术服务内容2.1 乙方负责对甲方人员进行技术培训,确保甲方能够独立、熟练地运用所转让的技术。
2.2 乙方应在合同签订后__天内,派遣技术专家到甲方现场进行设备安装、调试和培训工作。
2.3 合同有效期内,乙方应提供7x24小时的电话技术支持,解答甲方在运用中所遇到的问题。
三、技术转让费用及支付方式3.1 甲方向乙方支付技术转让费共计人民币____元(大写:_________________________元整)。
3.2 甲方支付技术转让费后,乙方应及时提供全部技术资料、培训等服务。
四、保密条款4.1 双方应对在合同执行过程中获知的对方商业秘密、技术秘密等保密信息予以严格保密。
4.2 保密期限自合同签订之日起算,至合同终止或履行完毕之日止。
五、违约责任5.1 任何一方违反本协议的约定,导致合同无法履行或造成对方损失的,应承担违约责任,向对方支付违约金,并赔偿损失。
六、争议解决6.1 双方在履行合同过程中发生的争议,应首先通过友好协商解决;协商不成的,任何一方均有权向合同签订地人民法院提起诉讼。
七、其他约定7.1 本协议自双方签字(或盖章)之日起生效,一式两份,甲乙双方各执一份。
甲方(盖章):____________ 乙方(盖章):____________代表(签名):____________ 代表(签名):____________签订日期:____________ 签订日期:____________注:本协议书范本仅供参考,具体内容需根据实际情况调整,并在签订前征求法律人士意见。
可编程控制器毕业设计任务1 了解可编程控制器毕业设计知识链接1 可编程控制器毕业设计总体要求1.毕业设计性质本毕业设计是在学习了PLC基本指令、PLC功能指令和工业控制的人机界面这三门核心毕业设计的基础上,通过毕业设计设计的实践,系统地掌握在工业自动化控制系统中,PLC及计算机控制的设计和应用的知识,为今后从事专业技术工作打下基础。
2.毕业设计目的本毕业设计以工业自动化控制系统的设计为主,设计由一些工业自动化设备组成的生产线的电气自动化控制系统。
整体控制方案可以采用集中分散式控制方案,也可以采用链式分散控制方案。
目的是使整个生产线保持节拍、协调作业,能够高效、稳定的工作,形成现代化的生产规模。
3设计内容工业自动化生产线是由自动化设备组成的,每一台设备在生产线中完成一部分工作,产品加工时通过运输工具在各台设备之间传递,因此这种自动化生产线也称为流水线。
本毕业设计要求通过PLC实验装置模仿这种生产线的工作,一个PLC实验装置仿真一台生产设备,几台PLC实验装置组成整个生产流水线。
根据要求,整个班级分成几个项目组,几个学生组成一个项目组,每个学生完成其中一台设备(一台实验装置)的编程和调试。
毕业设计仿真生产线是一条零件加工流水线,主要由6台设备组成6个工作单元,中间有一些辅助设备和环节,可供6~8名学生组成项目组进行毕业设计设计。
下面简单介绍一些这些设备的加工过程。
第1单元:由传送带运输毛坯零件通过一个长度检测和分类的辅助设备。
正常规格予以通过。
超长的零件也可以通过,但要加以记号。
以便进行2次加工,短的零件则报废剔除。
可以加工的零件到达加工设备后,首先经过定位、夹紧、端面加工,然后再释放到传送带上输送到先一个工位。
有记号的超长零件,则在完成上述加工后,再进行第二次加工进入下一工位。
第2单元:输送来的零件进入一个三工位设备的上料工位(一工位),零件在上料工位排队,当有加工信号时,送料器同时将该零件送到卸料工位(三工位)。


机器视觉基础知识详解随着工业4.0时代的到来,机器视觉在智能制造业领域的作用越来越重要,为了能让更多用户获取机器视觉的相关基础知识,包括机器视觉技术是如何工作的、它为什么是实现流程自动化和质量改进的正确选择等。
小编为你准备了这篇机器视觉入门学习资料。
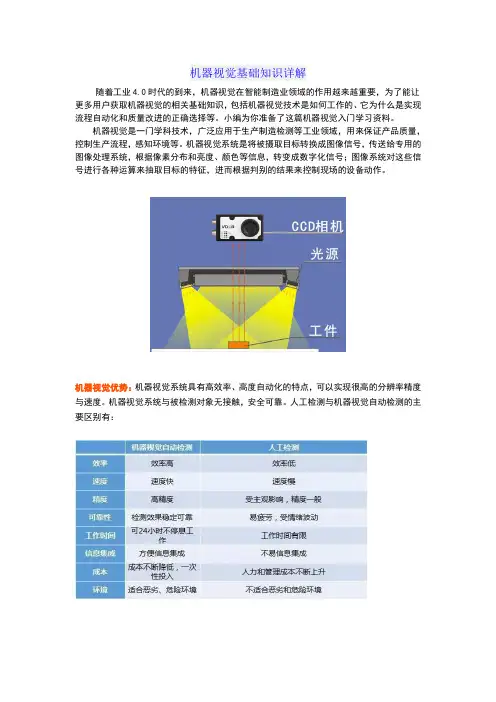
机器视觉是一门学科技术,广泛应用于生产制造检测等工业领域,用来保证产品质量,控制生产流程,感知环境等。
机器视觉系统是将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
机器视觉优势:机器视觉系统具有高效率、高度自动化的特点,可以实现很高的分辨率精度与速度。
机器视觉系统与被检测对象无接触,安全可靠。
人工检测与机器视觉自动检测的主要区别有:为了更好地理解机器视觉,下面,我们来介绍在具体应用中的几种案例。
案例一:机器人+视觉自动上下料定位的应用:现场有两个振动盘,振动盘1作用是把玩偶振动到振动盘2中,振动盘2作用是把玩偶从反面振动为正面。
该应用采用了深圳视觉龙公司VD200视觉定位系统,该系统通过判断玩偶正反面,把玩偶处于正面的坐标值通过串口发送给机器人,机器人收到坐标后运动抓取产品,当振动盘中有很多玩偶处于反面时,VD200视觉定位系统需判断反面玩偶数量,当反面玩偶数量过多时,VD200视觉系统发送指令给振动盘2把反面玩偶振成正面。
该定位系统通过玩偶表面的小孔来判断玩偶是否处于正面,计算出玩偶中心点坐标,发送给机器人。
通过VD200视觉定位系统实现自动上料,大大减少人工成本,大幅提高生产效率。
案例二:视觉检测在电子元件的应用:此产品为电子产品的按钮部件,产品来料为料带模式,料带上面为双排产品。
通过对每个元器件定位后,使用斑点工具检测产品固定区域的灰度值,来判断此区域有无缺胶情况。
该应用采用了深圳视觉龙公司的DragonVision视觉系统方案,使用两个相机及光源配合机械设备,达到每次检测双面8个产品,每分钟检测大约1500个。
总论21世纪是生命科学的世纪,生物化学与分子生物学是当代生命科学领域中一门重要的基础学科,它涵盖的基础理论,基本知识,基本技术与医学研究各学科领域密切相关,其理论与技术的发展,推动了生命科学的发展,对人类的科技进步与文明产生巨大影响。
生物化学实验是医学院校学生必修的一门独立的基础实验技术课程,其研究技术的发展与应用是依据物理学、化学及生物学的基本理论和实验方法而建立起来的。
20世纪20年代微量分析的发展,30年代电子显微镜的出现,40年代层析技术和电泳技术的兴起,以及同位素示踪技术、各种光谱技术、核磁共振技术的应用,激光、超导等新技术的出现,电子计算机技术的突飞猛进,使生物化学实验手段提高到一个崭新的水平,掌握生物化学实验方法和研究技术,对医学院校学生来说是十分重要的。
本门课程主要侧重于给学生以基本的实验方法和技能的训练,让学生了解并掌握生物化学的四大基本实验方法,即:分光光度法、离心法、层析法和电泳法。
同时也注意引进一些新近发展起来的、重要的生物化学及分子生物学研究技术,作为学生学习其他专业课程和进入科学研究领域的准备。
一、实验要求1.实验前必须预习实验指导和有关理论,明确实验目的、原理、预期的结果,操作关键步骤及注意事项。
2.实验时要严肃认真专心进行操作,注意观察实验过程中出现的现象和结果,结果不良时,必须重做。
3.实验中,应及时将实验结果如实记录下来,并请老师当场审核。
根据实验结果进行科学分析,按时将实验报告交教师评阅。
二、实验时注意事项1.进实验室要穿好实验服,以免酸碱腐蚀衣服。
2.进实验室前准备好实验指导、课本、笔记、实验记录本、报告本、文具等。
3.要保持实验台整洁,试剂、仪器应整齐,按次序放置。
实验完毕要按各类仪器的清洗方法和要求将仪器清洗干净。
4.实验室是培养学生独立思考、独立工作能力及良好科学作风的重要场所,操作务必认真不得敷衍,室内应保持肃静,不得吸烟、玩闹,不得随地吐痰,乱丢纸屑。