西门子 FM 350-1_FM 450-1 功能模块使用手册
- 格式:pdf
- 大小:201.37 KB
- 文档页数:7
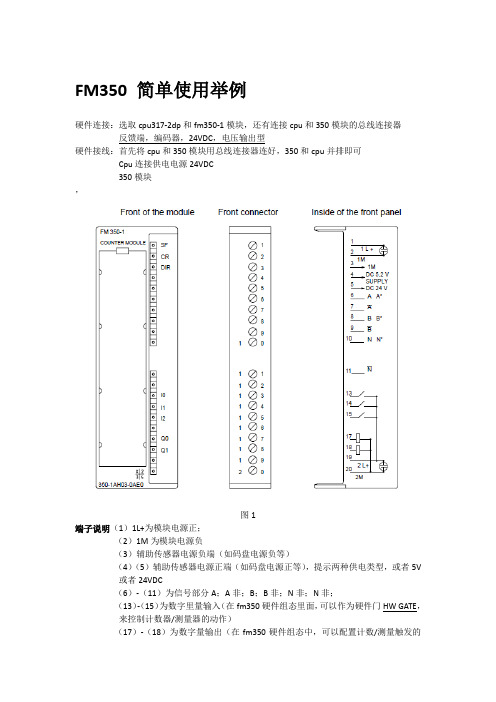
FM350 简单使用举例硬件连接:选取cpu317-2dp和fm350-1模块,还有连接cpu和350模块的总线连接器反馈端,编码器,24VDC,电压输出型硬件接线:首先将cpu和350模块用总线连接器连好,350和cpu并排即可Cpu连接供电电源24VDC350模块,图1端子说明(1)1L+为模块电源正;(2)1M为模块电源负(3)辅助传感器电源负端(如码盘电源负等)(4)(5)辅助传感器电源正端(如码盘电源正等),提示两种供电类型,或者5V或者24VDC(6)-(11)为信号部分A;A非;B;B非;N非;N非;(13)-(15)为数字里量输入(在fm350硬件组态里面,可以作为硬件门HW GATE,来控制计数器/测量器的动作)(17)-(18)为数字量输出(在fm350硬件组态中,可以配置计数/测量触发的极限状态输出;计数器是两个比较值;测量是作为上下极限,同样触发17端子和18端子有时间限制,最大保持时间为0.5s)补充说明:这些都可以在硬件组态中进行修改(19)2L+电源正(20)2M电源负为数字量输入输出的供电电源,如果采用数字量必须连接电源试验中,1L+ 和2L+接电源正;1M与2M接电源负;cpu与fm350共用一个电源传感器接线:端子5(24V)和3(M);信号端为端子6(A)和8(B)笔记本安装调试软件,把fm350随机光盘插入光驱,双击光驱安装FM350-1的配置包,路经为X:/setup/setup.exe (X为光驱盘符)调试1.建立项目打开,然后新建一个项目,命名为“350test”。
回车在新的项目窗口,右键点击“350test”,选择2.硬件配置选择刚才建立的300站,打开右边的硬件配置第一步:选取300站的导轨第二步:选取cpu317第三步:选取FM350硬件配置插槽位置如图:第四步;配置350双击fm350打开编辑画面(1)配置操作模式;双击选择,连续计数;控制方式为软件控制(2)配置传感器:双击选择编码器形式(3)其他配置数字量输入信号配置:可以配置输入信号滤波数字量输出信号配置:配置计数/测量事件,2个输出点还可以配置事件中断:主要是中断事件的触发硬件组态完毕,编译保存3.软件调试:打开setp7 manager窗口,点击打开,选择fm350库”FMx50LIB”,点击“ok”新窗口,同时选择FC0 和UDT1,复制切换回,原来新建的“350test”项目,粘贴在”Blocks”里。
目录1 安全信息 (1)术语定义 (1)前言 (1)2定位器的供货范围 (2)3组装…………………………………………………………………概述…………………………………………………………………定位器在潮湿环境中的使用……………………………………定位器在易受到强加速作用力或震动场合的使用……………直行程执行机构的连接附件………………………………………组装顺序……………………………………………………………角行程执行机构的连接附件………………………………………组装顺序………………………………………………………………4可选附件的安装……………………………………………………5电气连接……………………………………………………………6气动连接……………………………………………………………注入仪表空气开关………………………………………………..限流器………………………………………………………………7调试(见散页“操作—简要说明”)………………………………直行程执行机构调试准备…………………………………………直行程执行机构的自动初始化…………………………………直行程执行机构的手动初始化…………………………………角行程执行机构调试准备…………………………………………角行程执行机构的自动初始化…………………………………角行程执行机构的手动初始化…………………………………故障校正……………………………………阀门定位器的简明操作指南………………..附录一………………………………………………………………………附录二………………………………………………………………………1 安全信息1.2 前言本操作说明描述了定位器组装、连接、调试的基本步骤,不能取代SIPART PS2电气阀门定位器的操作手册,操作手册中包含了组装、功能、操作的详细信息。
无危险使用关于安全方面,定位器出厂时已达到完美状态,如果要保持此状态,用户必须要遵守本操作说明中安全提示。

应用于高速计数模块的编码器基础1 编码器基础1.1光电编码器编码器是传感器的一种,主要用来检测机械运动的速度、位置、角度、距离和计数等,许多马达控制均需配备编码器以供马达控制器作为换相、速度及位置的检出等,应用范围相当广泛。
按照不同的分类方法,编码器可以分为以下几种类型:根据检测原理,可分为光学式、磁电式、感应式和电容式。
根据输出信号形式,可以分为模拟量编码器、数字量编码器。
根据编码器方式,分为增量式编码器、绝对式编码器和混合式编码器。
光电编码器是集光、机、电技术于一体的数字化传感器,主要利用光栅衍射的原理来实现位移——数字变换,通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
典型的光电编码器由码盘、检测光栅、光电转换电路(包括光源、光敏器件、信号转换电路)、机械部件等组成。
光电编码器具有结构简单、精度高、寿命长等优点,广泛应用于精密定位、速度、长度、加速度、振动等方面。
这里我们主要介绍SIMATIC S7系列高速计数产品普遍支持的增量式编码器和绝对式编码器。
1.2增量式编码器增量式编码器提供了一种对连续位移量离散化、增量化以及位移变化(速度)的传感方法。
增量式编码器的特点是每产生一个输出脉冲信号就对应于一个增量位移,它能够产生与位移增量等值的脉冲信号。
增量式编码器测量的是相对于某个基准点的相对位置增量,而不能够直接检测出绝对位置信息。
如图1-1所示,增量式编码器主要由光源、码盘、检测光栅、光电检测器件和转换电路组成。
在码盘上刻有节距相等的辐射状透光缝隙,相邻两个透光缝隙之间代表一个增量周期。
检测光栅上刻有A、B两组与码盘相对应的透光缝隙,用以通过或阻挡光源和光电检测器件之间的光线,它们的节距和码盘上的节距相等,并且两组透光缝隙错开1/4节距,使得光电检测器件输出的信号在相位上相差90°。
当码盘随着被测转轴转动时,检测光栅不动,光线透过码盘和检测光栅上的透过缝隙照射到光电检测器件上,光电检测器件就输出两组相位相差90°的近似于正弦波的电信号,电信号经过转换电路的信号处理,就可以得到被测轴的转角或速度信息。

编码器输出信号类型一般情况下,从编码器的光电检测器件获取的信号电平较低,波形也不规则,不能直接用于控制、信号处理和远距离传输,所以在编码器内还需要对信号进行放大、整形等处理。
经过处理的输出信号一般近似于正弦波或矩形波,因为矩形波输出信号容易进行数字处理,所以在控制系统中应用比较广泛。
增量式光电编码器的信号输出有集电极开路输出、电压输出、线驱动输出和推挽式输出等多种信号形式。
1集电极开路输出集电极开路输出是以输出电路的晶体管发射极作为公共端,并且集电极悬空的输出电路。
根据使用的晶体管类型不同,可以分为NPN集电极开路输出(也称作漏型输出,当逻辑 1 时输出电压为0V,如图2-1所示)和PNP集电极开路输出(也称作源型输出,当逻辑 1 时,输出电压为电源电压,如图2-2所示)两种形式。
在编码器供电电压和信号接受装置的电压不一致的情况下可以使用这种类型的输出电路。
图2-1 NPN 集电极开路输出图2-2 PNP集电极开路输出对于PNP型的集电极开路输出的编码器信号,可以接入到漏型输入的模块中,具体的接线原理如图2-3所示。
注意:PNP型的集电极开路输出的编码器信号不能直接接入源型输入的模块中。
图2-3 PNP型输出的接线原理对于NPN型的集电极开路输出的编码器信号,可以接入到源型输入的模块中,具体的接线原理如图2-4所示。
注意:NPN型的集电极开路输出的编码器信号不能直接接入漏型输入的模块中。
图2-4 NPN型输出的接线原理2.2 电压输出型电压输出是在集电极开路输出电路的基础上,在电源和集电极之间接了一个上拉电阻,这样就使得集电极和电源之间能有了一个稳定的电压状态,如图2-5。
一般在编码器供电电压和信号接受装置的电压一致的情况下使用这种类型的输出电路。
图2-5 电压输出型2.3 推挽式输出推挽式输出方式由两个分别为PNP 型和NPN 型的三极管组成,如图2-6所示。
当其中一个三极管导通时,另外一个三极管则关断,两个输出晶体管交互进行动作。

编码器输出信号类型一般情况下,从编码器的光电检测器件获取的信号电平较低,波形也不规则,不能直接用于控制、信号处理和远距离传输,所以在编码器内还需要对信号进行放大、整形等处理。
经过处理的输出信号一般近似于正弦波或矩形波,因为矩形波输出信号容易进行数字处理,所以在控制系统中应用比较广泛。
增量式光电编码器的信号输出有集电极开路输出、电压输出、线驱动输出和推挽式输出等多种信号形式。
1集电极开路输出集电极开路输出是以输出电路的晶体管发射极作为公共端,并且集电极悬空的输出电路。
根据使用的晶体管类型不同,可以分为NPN集电极开路输出(也称作漏型输出,当逻辑1时输出电压为0V,如图2-1所示)和PNP集电极开路输出(也称作源型输出,当逻辑1时,输出电压为电源电压,如图2-2所示)两种形式。
在编码器供电电压和信号接受装置的电压不一致的情况下可以使用这种类型的输出电路。
图2-1 NPN集电极开路输出图2-2 PNP集电极开路输出对于PNP型的集电极开路输出的编码器信号,可以接入到漏型输入的模块中,具体的接线原理如图2-3所示。
注意:PNP型的集电极开路输出的编码器信号不能直接接入源型输入的模块中。
图2-3 PNP型输出的接线原理对于NPN型的集电极开路输出的编码器信号,可以接入到源型输入的模块中,具体的接线原理如图2-4所示。
注意:NPN型的集电极开路输出的编码器信号不能直接接入漏型输入的模块中。
图2-4 NPN型输出的接线原理2.2电压输出型电压输出是在集电极开路输出电路的基础上,在电源和集电极之间接了一个上拉电阻,这样就使得集电极和电源之间能有了一个稳定的电压状态,如图2-5。
一般在编码器供电电压和信号接受装置的电压一致的情况下使用这种类型的输出电路。
图2-5电压输出型2.3推挽式输出推挽式输出方式由两个分别为PNP型和NPN型的三极管组成,如图2-6所示。
当其中一个三极管导通时,另外一个三极管则关断,两个输出晶体管交互进行动作。
西门子FM350—1在同步控制系统中的应用随着我国科技的不断发展,我国的飞机制造业在不断的进步。
在生产中,科技水平越来越先进,为了能够实现对飞机生产性中两天输送链板的情况进行实时监控和实时控制,通过西门子FM350-1模块与高速编码器共同完成,建立起西门子控制器以及SIMOTION控制系统。
可以实现西门子FM350-1的同步控制功能,对于如何实现西门子FM350-1模块的高精度控制和运输,本文通过对西门子FM350-1在同步控制中的应用,分析和探讨同步控制系统的高精度和可靠性的实现。
标签:西门子FM350-1;同步控制系统;飞机运输;高精度随着我国科技的不断发展,在飞机制造中,飞机结构的装配是一项非常复杂的工作,对于目前的飞机装配工艺,已经不能适应时代的发展,适应不了多重型号的飞机装配。
随着数字化的不断深入,在飞机装配中引入数字化,能够有效地提高生产效率。
对于飞机制造领域来说,提高飞机装配的质量和装配周期,同时降低飞机的制造成本是一项重要的研究话题,通过数字化技术进行深入探讨。
1 西门子FM350-1模块简介和应用在飞机的生产过程中,由于飞机的制造中运输距离较长,对运输的精度要求非常高,同时需要很大的关系,所以对整个系统的要求也相对比较高,西门子控制系统在飞机的运输过程中主要是的以SIMOTION为控制系统,通过FM350-1模块进行编码的。
西门子FM350-1模块在编码中,通过对四根轴的编码计数,与四根轴的间接检测保持同步。
西门子功能模块一般是通过S7-300或M7-300的编程控制器进行高速编程,通过对软件的设置,使计数器的计数范围保持标准技术。
计数器的最大频率是500KHz;西门子模块可以实现连续计数、周期计数、单一计数、转速测量、频率测量以及周期测量等。
同时,西门子FM350-1功能模块一般用于高频信号和触发预设状态自动应答技术,主要有包装设备、分类设备以及定量给料设备等。
通过软门和硬门控制系统的启动和停止。
应用于高速计数模块的编码器基础1 编码器基础1.1光电编码器编码器是传感器的一种,主要用来检测机械运动的速度、位置、角度、距离和计数等,许多马达控制均需配备编码器以供马达控制器作为换相、速度及位置的检出等,应用范围相当广泛。
按照不同的分类方法,编码器可以分为以下几种类型:根据检测原理,可分为光学式、磁电式、感应式和电容式。
根据输出信号形式,可以分为模拟量编码器、数字量编码器。
根据编码器方式,分为增量式编码器、绝对式编码器和混合式编码器。
光电编码器是集光、机、电技术于一体的数字化传感器,主要利用光栅衍射的原理来实现位移——数字变换,通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
典型的光电编码器由码盘、检测光栅、光电转换电路(包括光源、光敏器件、信号转换电路)、机械部件等组成。
光电编码器具有结构简单、精度高、寿命长等优点,广泛应用于精密定位、速度、长度、加速度、振动等方面。
这里我们主要介绍SIMATI C S7系列高速计数产品普遍支持的增量式编码器和绝对式编码器。
1.2增量式编码器增量式编码器提供了一种对连续位移量离散化、增量化以及位移变化(速度)的传感方法。
增量式编码器的特点是每产生一个输出脉冲信号就对应于一个增量位移,它能够产生与位移增量等值的脉冲信号。
增量式编码器测量的是相对于某个基准点的相对位置增量,而不能够直接检测出绝对位置信息。
如图1-1所示,增量式编码器主要由光源、码盘、检测光栅、光电检测器件和转换电路组成。
在码盘上刻有节距相等的辐射状透光缝隙,相邻两个透光缝隙之间代表一个增量周期。
检测光栅上刻有A、B两组与码盘相对应的透光缝隙,用以通过或阻挡光源和光电检测器件之间的光线,它们的节距和码盘上的节距相等,并且两组透光缝隙错开1/4节距,使得光电检测器件输出的信号在相位上相差90°。
FM350-1功能模块
使
用
说
明
书
FM350-1概述
单通道智能计数模板,可连接5V增量编码器、24V增量编码器、带方向信号的脉冲传感器, 5V信号最大500Hz, 24V 信号最大200Hz,具有软件门和硬件门控制计数和测量,带比较值输出。
FM350-1可以在IM153-1、IM153-2、S7-300系统中使用。
安装和接线
在选择好计数传感器后需要确认模板侧面的跳线块, A对应5V信号,D对应24V信号。
操作方式
首先安装FM350-1软件,在SIMATIC Manager中打开库FMx50LIB。
复制所有的块进入自己的项目。
仅仅6ES7 350-1AH03-0AE0具有测量功能。
下面描述几个功能块的性能和区别
FC0 计数和测量功能,使用UDT1生成的数据块
FC1 诊断FM模板
FC2 计数和测量功能,支持等时模式,能够在操作中改变参数和置位、复位输出。
使用UDT2生成的数据块。
FC3 功能和FC2基本一样,但仅仅使用在等时模式,对等时模式进行了优化,运算速度在等时模式比FC2快
计数模式
首先生成应用程序数据块。
FM 350-1常见问题分析
目录
1高速计数器FM350-1是连结增量型编码器的功能模板。
如何做到断电保持上次的计数值 (2)
2升级FM350-1(6ES7 350-1AH03-0AE0)的固件版本,从V1.0.0 到 V1.0.2 (3)
3已经通过CD正确安装配置FM350-1模板的软件,但是在“STEP 7 V5.1 +
SP6”的硬件组态中,无法发现硬件FM350-1 (6ES7 350-1AH03-0AE0) (3)
4FM350-1 (6ES7 350-1AH03-0AE0)电子手册 (3)
5FM350-1 (6ES7 350-1AH03-0AE0)的产品信息 (3)
6下载配置FM350-1,FM450-1的软件包V5.1(03.2003) (3)
7当使用IM365扩展接口模板做系统配置时,是否可以使用FM350-1模板 (3)
8数据块部分信息介绍(DATA BLOCK) (3)
9如何快速预装载计数值 (5)
10是否在FM450-1组态包里,用于显示硬件门控制器的图像是颠倒的 (6)
11FM450-1在仅仅使用通道0时,模板总报告通道1的信号有错误,外部错误··6
12FM450-1的电子手册 (6)
13FM450-1的快速入门手册“GETTING STARTED MANUAL” (7)
1 高速计数器FM350-1是连结增量型编码器的功能模板。
如何做到断电
保持上次的计数值
高速计数模板的计数当前值,都是存储在CPU的数据块DB中,不会丢失。
可以如下编程处理:
i. 在每次CPU上电时候,OB100中进行初始化程序处理——传递CPU数据块DB中的
当前计数值DBD34,放置到装载数值DBD14中。
调用功能块“CNT_CTL1
Function”,置位操作“L_PREPAR”;
ii. 在OB1中调用功能块“CNT_CTL1 Function”,使用脉冲上升沿信号触发操作“L_DIRREC”;
iii. 即可以做到断电保持上次的计数值,开始正常的高速计数操作。
2 升级FM350-1(6ES7 350-1AH03-0AE0)的固件版本,从V1.0.0 到
V1.0.2
请点击:/WW/view/en/1086726在线阅读
“Firmware Updates for FM350-1 (6ES7 350-1AH03-0AE0)”。
3 已经通过CD正确安装配置FM350-1模板的软件,但是在“STEP 7
V5.1 + SP6”的硬件组态中,无法发现硬件FM350-1 (6ES7 350-
1AH03-0AE0)
请点击:/WW/view/en/16910947 在线阅读“FM 350-1 is not parametrizable with STEP 7 smaller than V5.2”。
4 FM350-1 (6ES7 350-1AH03-0AE0)电子手册
请点击:/WW/view/en/1086726在线“下载”或者“阅读”。
5 FM350-1 (6ES7 350-1AH03-0AE0)的产品信息
请点击:/WW/view/en/14747043在线阅读。
6 下载配置FM350-1,FM450-1的软件包V5.1(03.2003)
请点击:/WW/view/en/14732973在线下载。
7 当使用IM365扩展接口模板做系统配置时,是否可以使用FM350-1模
板
请点击:/WW/view/en/7815221和
/WW/view/en/19182754在线阅读FAQ。
8 数据块部分信息介绍(Data Block)
用户所需要的模板状态信息,CPU通过功能块FC CNT_CTL1对FM350-1模板的控制,均需要通过库中的UDT2生成的Data Block来完成。
每一个FM350-1都需要一个相对应的Data Block,里面包含FM350-1的逻辑地址、功能、状态信息,等等。
在模板参数配置之前,必须给该Data Block中的重要数据分配数据,如:模板地址(DBW6),通道地址(DBD8),等等。
地址变量名称数据类型初始值功能描述
模板参数,地址信息
0.0 AR1_BUFFER DWORD DW#16#0AR1缓冲区
4.0 FP BYTE B#16#0 标志位
6.0 MOD_ADR WORD W#16#0 模板地址
8.0 CH_ADR DWORD DW#16#0通道地址
12.0 U_D_LGTH BYTE B#16#0 用户数据长度
用于“写操作”的数据区
14.0 LOAD_VAL DINT L#0 新的计数装载值
18.0 CMP_V1 DINT L#0 新的比较值1
22.0 CMP_V2 DINT L#0 新的比较值2
用于“控制操作”的数据区
27.0 ENSET_UP BOOL FALSE 使能操作:计数方向为“上”
27.1 ENSET_DN BOOL FALSE 使能操作:计数方向为“下”
28.0 CTRL_DO0 BOOL FALSE 使能操作“DO0输出”有效
28.1 CTRL_DO1 BOOL FALSE 使能操作“DO1输出”有效
用于“读操作”的数据区
30.0 LATCH_LOAD DINT L#0 当前的装载值,测量值
34.0 ACT_CNTV DINT L#0 当前的高速计数值
用于显示“出错信息”的数据区
38.0 DA_ERR_W WORD W#16#0 数据错误信息
40.0 OT_ERR_B BYTE B#16#0 操作错误信息
用于显示模板“反馈信息”的数据区
41.4 DATA_ERR BOOL FALSE 数据出错
41.7 PARA BOOL FALSE 模板已经被正确参数化配置
43.0 STS_RUN BOOL FALSE 高速计数器正在工作否?
43.1 STS_DIR BOOL FALSE 高速计数的计数方向?
43.2 STS_ZERO BOOL FALSE 经过“零”脉冲信号
43.3 STS_OFLW BOOL FALSE 计数值上溢出
43.4 STS_UFLW BOOL FALSE 计数值下溢出
43.5 STS_SYNC BOOL FALSE 计数器同步
43.6 STS_GATE BOOL FALSE 内部门的状态
43.7 STS_SW_G BOOL FALSE 软件门的状态
44.0 STS_SET BOOL FALSE 数字量输入点的状态
44.1 STS_LATCH BOOL FALSE (仅仅用于时钟同步模式),新的44.2 STS_STA BOOL FALSE 用于“开始”功能数字量输入点状态44.3 STS_STP BOOL FALSE 用于“停止”功能数字量输入点状态44.4 STS_CMP1 BOOL FALSE “比较值1”数字量输出点状态44.5 STS_CMP2 BOOL FALSE “比较值2”数字量输出点状态44.6 STS_COMP1 BOOL FALSE 比较器1的状态
44.7 STS_COMP2 BOOL FALSE 比较器2的状态
用于功能块“FC DIAG_INF”的模板诊断信息
54.0 MDL_DEFECT BOOL FALSE 模板出错
54.1 INT_FAULT BOOL FALSE 内部错误
54.2 EXT_FAULT BOOL FALSE 外部错误
54.3 PNT_INFO BOOL FALSE 通道错误
54.4 EXT_VOLTAGE BOOL FALSE 辅助电压错误
54.5 FLD_CONNCTR BOOL FALSE 前联结器错误
54.6 NO_CONFIG BOOL FALSE 没有参数化
54.7 CONFIG_ERR BOOL FALSE 参数配置错误
其余,参见手册“第10 章节”(DB Assignments)。
9 如何快速预装载计数值
为了尽可能快速地完成预装载计数值到高速计数器的寄存器中,可以分两部分来做:
i. 传递新的装载值到数据块DB中的装载数值DBD14中;
ii. 调用功能块“CNT_CTL1 Function”,置位操作“L_PREPAR”;
iii. 通过模板的数字量输入点“DI Set”,完成装载计数值的快速操作。
10 是否在FM450-1组态包里,用于显示硬件门控制器的图像是颠倒的
在FM450-1组态包里的“输入”窗口中,用于显示硬件门控制器的图像是颠到的。
“边缘-控制的硬件门(DI 启动, DI 停止)”所用的图像被分配给了参数选项“电平-控制的硬件门 (DI 启动)”。
而“电平-控制的硬件选通 (DI 启动)”用的图像被分配给了参数选项“边缘-控制的硬件选通(DI 启动, DI 停止)”。
这种显示纯属组态包里的图形错误,并不影响模块功能或模块的参数化。
该输入的选定的参数化在FM450-1上实施。
图 1:在FM450-1用的组态包里图像的颠倒。
请点击:/WW/view/en/12307112在线阅读FAQ。
11 FM450-1在仅仅使用通道0时,模板总报告通道1的信号有错误,外
部错误
请点击:/WW/view/en/10657112在线阅读FAQ。
12 FM450-1的电子手册
请点击:/WW/view/en/1118412下载或者在线阅读。
13 FM450-1的快速入门手册“Getting Started Manual”
请点击:/WW/view/en/5574978下载或者在线阅读。