第七章 超静定结构
- 格式:doc
- 大小:166.00 KB
- 文档页数:6










第七节超静定结构一、超静定次数超静定结构是具有多余约束的几何不变体系。
超静定结构中多余约束(或多余未知力)的数目称为超静定次数。
由于存在多余约束,超静定结构的反力和内力单靠静力平衡条件不能完全确定,须同时考虑变形协调条件(即位移条件)。
超静定次数也是超静定结构计算中除静力平衡方程以外,尚需补充的反映位移条件的方程的数目。
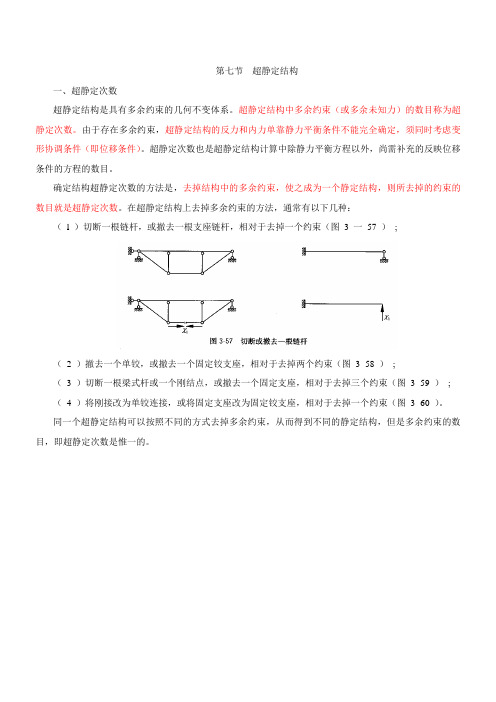
确定结构超静定次数的方法是,去掉结构中的多余约束,使之成为一个静定结构,则所去掉的约束的数目就是超静定次数。
在超静定结构上去掉多余约束的方法,通常有以下几种:(l )切断一根链杆,或撤去一根支座链杆,相对于去掉一个约束(图3 一57 );(2 )撤去一个单铰,或撤去一个固定铰支座,相对于去掉两个约束(图3- 58 );(3 )切断一根梁式杆或一个刚结点,或撤去一个固定支座,相对于去掉三个约束(图 3 -59 );(4 )将刚接改为单铰连接,或将固定支座改为固定铰支座,相对于去掉一个约束(图 3 -60 )。
同一个超静定结构可以按照不同的方式去掉多余约束,从而得到不同的静定结构,但是多余约束的数目,即超静定次数是惟一的。
二、力法计算超静定结构力法计算超静定结构的一般步骤为:( 1 )确定超静定次数(多余约束数)n ,即为基本未知量的数目。
( 2 )去掉多余约束,得到一个静定的基本结构,并以多余未知力代替相应的多余约束。
( 3 )根据基本结构在多余力和原有荷载共同作用下,多余力作用点沿其作用方向的位移与原结构相应位移相等的条件,建立 n 个关于多余未知力的方程,即力法典型方程如下:式中,系数δij 表示基本结构在第 j 个单位多余未知力X 1 单独作用下所引起的X i 方向的位移;自由项ΔiP ,表示基本结构在外荷载单独作用下所引起的X i 方向的位移.( 4 )作出基本结构在各单位多余未知力(12X 1X 1==L ,)和原有荷载单独作用下的内力图:12M M L ,及M p 图。





第七章超静定结构§7.1 超静定结构特性●由于多余约束的存在产生的影响1. 内力状态单由平衡条件不能惟一确定,必须同时考虑变形条件。
2. 具有较强的防护能力,抵抗突然破坏。
3. 内力分布范围广,分布较静定结构均匀,内力峰值也小。
4. 结构刚度和稳定性都有所提高。
●各杆刚度改变对内力的影响1. 荷载作用下内力分布与各杆刚度比值有关,与其绝对值无关。
2. 计算内力时,允许采用相对刚度。
3. 设计结构断面时,需要经过一个试算过程。
4. 可通过改变杆件刚度达到调整内力状态目的。
●温度和沉陷等变形因素的影响1. 在超静定结构中,支座移动、温度改变、材料收缩、制造误差等因素都可以引起内力,即在无荷载下产生自内力。
2. 由上述因素引起的自内力,一般与各杆刚度的绝对值成正比。
不应盲目增大结构截面尺寸,以期提高结构抵抗能力。
3. 预应力结构是主动利用自内力调节超静定结构内力的典型范例。
§7.2 力法原理●计算超静定结构的最基本方法超静定结构是具有多余联系(约束)的静定结构,其反力和内力(归根结底是内力)不能或不能全部根据静力平衡条件确定。
力法计算超静定结构的过程一般是在去掉多余联系的静定基本结构上进行,并选取多余力(也称赘余力)为基本未知量(其个数等于原结构的超静定次数)。
根据基本体系应与原结构变形相同的位移条件建立方程,求解多余力后,原结构就转化为在荷载和多余力共同作用下的静定基本结构的计算问题。
这里,基本体系起了从超静定到静定、从静定再到超静定的过渡作用,即把未知的超静定问题转换成已知的静定问题来解决。
●基本结构的选择(解题技巧)1. 通常选取静定结构;也可根据需要采用比原结构超静定次数低的、内力已知的超静定结构;甚至可取几何可变(但能维持平衡)的特殊基本结构。
2. 根据结构特点灵活选取,使力法方程中尽可能多的副系数δij = 0。
3. 应选易于绘制弯矩图或使弯矩图限于局部、并且便于图乘计算的基本结构。
第七章超静定结构授课学时:6学时一、内容提要1、理解超静定结构中的一些基本概念,即:静定与超静定、超静定次数、多余约束、超静定系统(结构)、基本静定系以及相当系统等。
2、熟练掌握用力法求解超静定结构。
3、掌握对称与反对称性质并能熟练应用这些性质求解超静定结构。
4、了解连续梁的概念以及三弯矩方程。
二、基本内容1、超静定系统中的一些基本概念超静定结构或系统:用静力学平衡方程无法确定全部约束力和内力的结构或结构系统。
静定结构或系统:无多余联系的几何不变的承载结构系统,其全部约束反力与内力都可由静力平衡方程求出的机构或结构系统。
多余约束:在无多余联系的几何不变的静定系统上增加约束或联系。
外超静定:超静定结构的外部约束反力不能全由静力平衡方程求出的情况。
内超静定:超静定结构内部约束(或联系)形成的内力不能单由静力平衡方程求出的情况。
混合超静定结构:对于内、外超静定兼而有之的结构。
基本静定系:解除超静定结构的某些约束后得到静定结构,称为原超静定结构的基本静定系(简称为静定基)。
静定基的选择可根据方便来选取,同一问题可以有不同选择。
相当系统:在静定基上加上外载荷以及多余约束力的系统称为静不定问题的相当系统。
超静定次数:超静定结构的所有未知约束反力和内力的总数与结构所能提供的独立的静力平衡方程数之差。
2、力法与正则方程力法:以多余约束力为基本未知量,将变形或位移表示为未知力的函数,通过变形协调条件作为补充方程求来解未知约束力,这种方法称为力法,又叫柔度法。
应用力法求解超静定问题的步骤:1)根据问题,确定其是静定还是超静定问题,如为后者,则确定超静定次数。
2)确定哪些约束是多余约束,分析可供选择的基本静定系,并注意利用对称性,反对称性,选定合适的静定系统,在静定系上加上外力和多余约束力,形成相当系统。
3)比较相当系统与原系统,在多余约束处,确定变形协调条件,并列写正则方程(对有n 个多余约束的结构)011212111=∆++⋅⋅⋅++F Rn n R R F F F δδδ022222121=∆++⋅⋅⋅++F Rn n R R F F F δδδ.02211=∆++⋅⋅⋅++nF Rn nn R n R n F F F δδδ其中F Ri 表示n 个多余约束力,δij 表示F Rj =1引起i 处沿F Ri 方向的位移,∆iF 表示结构所有已知载荷产生的在i 处沿F Ri 方向的位移。
4)用莫尔积分计算δij ,∆iF在基本系统上的不同多余约束处分别施加单位力(广义力),建立单位载荷系统,作出相应内力图。
在基本系统上加上外载荷,作出相应内力图,用图乘法分别求出δij ,∆iF 。
5)求解正则方程,解出未知多余约束力F Ri ,作出载荷及多余约束力作用于基本静定系上引起的内力图,供进一步分析用。
3、对称与反对称性质对称结构:几何尺寸、形状,构件材料及约束条件均对称于某一轴的结构。
当对称结构受力也对称于结构对称轴,则此结构将产生对称变形。
若外力反对称于结构对称轴,则结构将产生反对称变形。
当对称结构上受对称载荷的作用时,在对称截面上,反对称内力为零或已知;当对称结构上作用反对称载荷时,在对称截面上,对称内力为零或已知。
当对称结构上作用的载荷不是对称或反对称的,但可把它转化为对称和反对称的两种载荷的叠加,则可求出对称和反对称两种情况的解,叠加后即为原载荷作用下的解。
4、连续梁与三弯矩方程1)、连续梁及其超静定次数:一简支梁,在其两支座中间增加若干个辊轴铰支座形成的超静定结构,称为连续梁。
中间支座的个数即其超静定次数。
2)连续梁的静定系与相当系统:将支座上方梁切开改为铰链连结,每一跨都是一个简支梁,即为连续梁的一种静定系。
在静定系上加上外载荷,在中间支座上方铰链处加上一对大小相等、方向相反的力偶矩M 1,M 2,...,M m (设有个m 中间支座),以多余未知力M 1,M 2,...,M m 为基本未知量。
3)变形协调条件与三弯矩方程:比较相当系与原系统,中间支座上方梁的两侧截面相对转角为零(原系统是连续的,在支座处不会折断)。
据此写出正则方程,即三弯矩方程。
()⎪⎪⎭⎫⎝⎛+-=+++++++++-1111111662n n n nn n n n n n n n n l b l a l M l l M l M ωω 其中M n 为第n 个中间支座处的弯矩,l n 为第n 个中间支座左段梁的跨度,ωn 为跨度l n 对应的弯矩图的面积,a n 表示外载荷单独作用下,跨度l n 内弯矩图面积ωn 的形心到左端的距离,b n+1表示外载荷单独作用下,跨度l n+1内弯矩图面积ωn+1的形心到右端的距离。
4)求出由m 个中间支座组成的连续梁的联立方程组,解出多余约束力M n (n=1,2,…m )。
最后,问题化为基本静定系的求解。
三、典型例题分析1、 抗弯刚度为EI 的梁AB 的支承及受力情况如图(a )所示,试求约束反力。
( )( )( )解:图(a )所示结构是关于梁中点对称的结构,结构上的载荷既非对称又非反对称,但我们可将其分解成对称和反对称两种载荷的叠加。
我们先来研究对称载荷的情况。
将图示梁沿对称截面E 切开,对于平面问题,对称截面上将有三对内力。
由于对称载荷只有对称内力,则作为反对称的剪力为零。
其次,在没有水平方向载荷的情况下,由于梁的弯曲变形很微小,横截面的水平位移为二阶微量,可以忽略,因此,水平方向的约束反力也可忽略不计,于是约束反力仅有一对,即力偶F R1(图(b ))。
注意到对称截面的转角为零,研究其中一半,正则方程可写成01111=∆+F R F δ (1)式中,∆1F 是由于F 引起的E 截面的转角;δ11为F R1=1时引起的E 截面的转角,由图(b )不难得到EIa EIFa F2,21121=-=∆δ将∆1F 和δ11代入正则方程(1)中,可得41FaF R =由此求得图(b )中A 点的约束反力43)(''FaM F F A A =↑= 同理可得B 点得约束反力43)(''FaM F F B B =↑= 其次,再研究反对称载荷。
沿结构得对称截面E 切开,截面只有反对称内力,即剪力F R1(图(c ))。
注意到,对称截面得垂直位移为零,研究其中一半结构,其正则方程同(1)式,由图(c )可得EIa EI Fa F38,6531131=-=∆δ将∆1F 和δ11代入正则方程(1)中,可得1651FF R =由此求得图(c )中A 点和B 点的约束反力83)(1611''''FaM FF A A =↑=83)(1611''''Fa M F F B B =↓=由叠加法可知,结构A 端和B 端得约束分别为89)(1627''''''FaM M M FF F F A A A A A A =+=↑=+= 83)(165''''''Fa M M M F F F F B B B B B B =+=↑=+=2、求解图(a )所示连续梁。
解:支座编号如图所示。
l 1=6m ,l 2=5m ,l 3=4m 。
基本静定系得每个跨度皆为简支梁,这些简支梁在外载荷作用下得弯矩图如图(c )所示。
由此求得2114464821m kN ⋅=⨯⨯=ω 222555.732m kN ⋅=⨯⨯=ω236043021m kN ⋅=⨯⨯=ω( )( )( )( )( )同时可求得以上弯矩图面积得形心得位置m a 383261=+=m b a 2522==m b 353143=+=梁在左端有外伸部分,支座0上梁截面得弯矩显然是m kN M ⋅-=⨯⨯-=4222120对跨度l 1和跨度l 2写出三弯矩方程。
这时n=1,M n-1=M 0=-4kN ⋅m ,M n =M 1,M n+1=M 2,l n =l 1=6m ,l n+1=l 2=5m ,a n =a 1=8/3m ,b n+1=b 2=5/2m 。
代入三弯矩方程,得25525636814465)56(26421⨯⨯⨯-⨯⨯⨯=⨯++⨯⨯+⨯-M M再对跨度l 2和跨度l 3写出三弯矩方程。
这时n=2,M n-1=M 1,M n =M 2,M n+1=M 3=0,l n =l 2=5m ,l n+1=l 3=4m ,a n =a 2=5/2m ,b n+1=b 3=5/3m 。
代入三弯矩方程,得34560625525640)45(2521⨯⨯⨯-⨯⨯⨯-=⨯++⨯⨯+⨯M M整理上面得两个三弯矩方程,得2251854355222121-=+-=+M M M M解以上联立方程组,得出.7m-,0718.⋅=49M=mkN-M⋅kN12求得M1和M2以后,连续梁三个跨度得受力情况如图(b)所示。
可以把它们看作是三个静定梁,而且载荷和端载荷都是已知得。
对每一跨都可以求出反力并作剪力图和弯矩图,把这些图联接起来就是连续梁得剪力图和弯矩图。
进一步可以进行强度和变形计算。
返回。