起重机基本结构及原理
- 格式:ppt
- 大小:5.36 MB
- 文档页数:34

起重机的原理
起重机主要依靠杠杆原理和机械能转化原理实现货物的搬运和举升。
首先,起重机中的杠杆原理指的是利用杠杆的力矩平衡来实现力的传递和平衡。
起重机由一个主杠杆(臂杆)和一个副杠杆(顶杆)组成。
当起重机吊钩下方存在一定重物时,主杠杆和副杠杆之间的杠杆平衡关系使得吊钩上方的重物受到一对等大的力的支撑,从而实现吊钩对重物的悬挂和举升。
其次,起重机还利用机械能转化原理,将人力或电力等形式的能量转化为机械能从而实现吊钩的升降和工作。
起重机通常配备电动机或液压系统,通过提供动力和能量,使起重机的液压缸或绞车等机械装置正常工作。
电动机或液压系统的能量输入经过各种机械传动装置转化为机械能,从而实现吊钩的上升、下降及货物的水平移动等。
综上所述,起重机主要利用杠杆原理平衡力矩和机械能转化原理实现货物的举升和搬运,从而实现工程施工、物流运输等方面的工作。
起重机原理
起重机是一种用于吊装重物的机械设备,主要由机架、起重机械制动器、起升机械制动器、驱动装置和控制系统等部分组成。
起重机的工作原理是通过起升机械制动器和驱动装置来实现对重物的垂直和水平运动。
起升机械制动器由电机、减速器和制动器组成,通过控制电机的启停和制动器的脱开和接合来控制重物的升降。
驱动装置主要包括电动机和传动装置,电动机通过传动装置将旋转动力传递给各个机械部件,使其能够运动。
传动装置通常采用齿轮机构或链条传动等方式,可根据需要选择不同的传动比例和速度。
控制系统是起重机的核心部分,用于实现对起重机的控制和操作。
控制系统通常由电气控制柜、操纵台和传感器等组成,通过控制柜中的电路和按钮来控制起升和移动等动作。
起重机在工作时,操作人员通过操纵台上的按钮来控制起重机的运动和停止。
当需要升降重物时,操作人员按下相应的按钮,控制电机启动并使起升机械制动器脱开,重物开始向上运动;当需要移动重物时,操作人员通过控制按钮控制驱动装置的启动,使重物沿指定方向移动。
总之,起重机的基本原理是通过起升机械制动器和驱动装置来实现对重物的垂直升降和水平移动,通过控制系统实现对起重
机的控制和操作。
它在许多行业中广泛应用,能够提高工作效率和减少人力劳动。
起重机的组成及工作原理起重机由驱动装置、工作机构、取物装置、操纵控制系统和金属结构组成。
通过对控制系统的操纵,驱动装置将动力的能量输入,转变为机械能,在传递给取物装置。
取物装置将被搬运物体与起重机联系起来,通过工作机构单独或组合运动,完成物体搬运任务。
可移动金属结构将各组成部分连接成一个整体,并承载起重机的自重和吊重。
起重机的组成及工作原理图2-3 起重机的工作原理一、驱动装置驱动装置是用来驱动工作机构的动力设备。
常见的驱动设备有电力驱动、内燃机驱动和人力驱动等,电能是清洁、经济的能源,电力驱动是现代起重机的主要驱动方式。
二、工作机构工作机构包括:起升机构、运行机构。
a)起升机构是用来实现物体的垂直升降的机构是任何起重机部可缺少的部分,因此它是起重机最主要、最基本的机构。
b)运行机构是通过起重机或起升小车来实现水平搬运物体的机构,可分为有轨运行和无轨运行。
三、取物装置取物装置是通过吊钩将物体与起重机联系起来进行物体吊运的装置。
根据被吊物体不同的种类、形态、体积大小,采用不同种类的取物装置。
合适的取物装置可以减轻工作人员的劳动强度,大大提高工作效率。
防止吊物坠落,保证工作人员的安全和吊物不受损伤时对取物装置安全的基本要求。
四、金属结构金属结构是以金属材料轧制的型钢和钢板做为基本构件,通过焊接、铆接、螺栓连接等方法,按一定的组成规则连接,承受起重机的自重和载荷的钢结构。
金属结构的重量大约是整台起重机的40% -70%左右,重型起重机可达到90%;金属结构按照它的构造可分为实腹式和格构式两类,组成起重机的基本受力构件。
起重机金属结构的工作特点有受力复杂、自重大、耗材多和整体可移动性。
起重机的金属结构是起重机的重要组成部分,它是整台起重机的骨架,将起重机的机械和电气设备连接组合成一个有机的整体,承受和传递作用在起重机上的各种载荷并形成一定的作业空间,以便使起吊的重物搬运到指定的地点。
五、控制操纵系统通过电气系统控制操纵起重机各机构及整机的运动,进行各种起重作业。
起重机的机械组成及工作原理
起重机使用原理:滑轮组由定滑轮和动滑轮组成,每个定滑轮改变一次力的方向,每个动滑轮节省一半力,不同的起重机使用不同的原理,施工起重机的工作原理是杠杆原理。
驱动(桥式起重机)的工作原理是桥串的原理。
或者可以说是抛物线原理。
起重机是指在一定范围内对重物进行垂直升降和水平升降的多作用起重机械。
又名鹤。
起重机按结构通常分为悬臂式起重机和桥式起重机。
臂式起重机:包括塔式起重机、门式起重机、浮式起重机、自行起重机、由桅杆和臂架组成的桅杆起重机、沿墙运行的壁式起重机和安装在船舶甲板上的甲板起重机等。
桥式起重机:包括桥式起重机、门式起重机、托架桥式起重机和缆索桥式起重机(用载重缆索代替桥式起重机)等。
起重机是如何工作的?起重机主要由起升机构、运行机构、变幅机构、回转机构和金属结构组成。
起升机构是起重机的基本工作机构,多由悬挂系统和卷扬机组成,也可通过液压系统起吊重物。
起重机应用的机械原理图1. 起重机的基本原理•起重机是一种用来搬运重物的机械设备,通过应用机械原理来实现。
•起重机通常由底座、井架、起重机械、起重机臂和配重器等部分组成。
•起重机的原理是利用杠杆原理和拉绳原理来实现货物的悬挂、升降和前后移动。
2. 基于杠杆原理的起重机设计•起重机的主要部件包括井架、起重机臂和配重器。
•井架是起重机的支撑结构,通过利用杠杆原理来支撑重物的悬挂和移动。
•起重机臂是起重机的升降和伸缩部分,利用杠杆原理来实现货物的升降。
•配重器是起重机的平衡装置,利用杠杆原理来平衡和稳定起重机的运行。
3. 基于拉绳原理的起重机设计•起重机的拉绳系统主要包括卷筒、钢丝绳和滑轮等部分。
•卷筒是起重机的动力装置,通过卷绕钢丝绳来实现升降和前后移动。
•钢丝绳是起重机的悬挂和运输装置,通过受力和松弛来实现货物的悬挂和运输。
•滑轮是起重机的拉绳导向装置,通过减少摩擦力来提高起重机的工作效率。
4. 起重机的工作原理•起重机的工作原理是将物体从低处提升到高处或从高处降下来,通过应用机械原理来实现。
•起重机通常通过起重机械和起重机臂的协同工作来完成货物的悬挂、升降和前后移动。
•起重机的操作员通过控制起重机的控制装置来实现起重机的运行和工作。
5. 起重机的应用领域•起重机广泛应用于工厂、港口、仓库和建筑工地等场所。
•在工厂中,起重机可用于装卸货物、搬运重物和维护设备。
•在港口中,起重机可用于装卸货船、集装箱和货物堆栈。
•在仓库中,起重机可用于堆垛、拣选和运输货物。
•在建筑工地中,起重机可用于吊装建筑材料和运输设备。
6. 起重机的发展趋势•随着科技的发展,起重机逐渐实现了自动化控制和智能化管理。
•现代起重机采用电子控制系统和传感器来实现精确控制和监测。
•起重机的结构和材料也在不断改进,以提高起重机的承载能力和工作效率。
•同时,起重机的安全性和可靠性也得到了大幅提升,以确保操作员和周围环境的安全。
综上所述,起重机应用的机械原理图是基于杠杆原理和拉绳原理来设计和实现的。
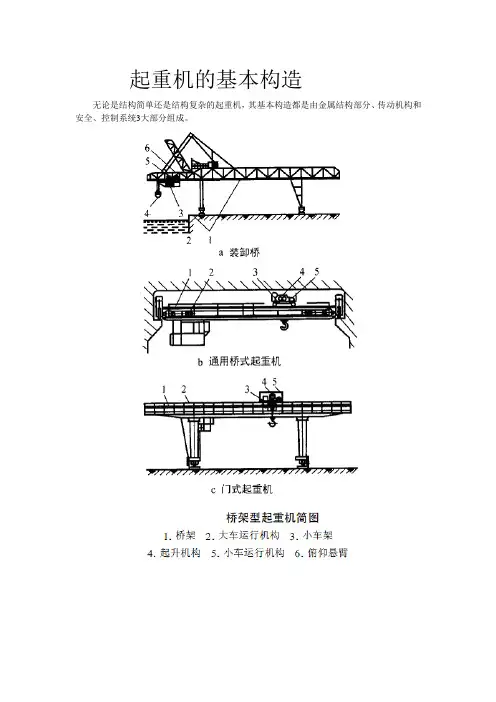
起重机的基本构造无论是结构简单还是结构复杂的起重机,其基本构造都是由金属结构部分、传动机构和安全、控制系统3大部分组成。
能使起重机发生某种动作的传动系统,统称为起重机的机构。
因起重运输作业的需要,起重机要做升降、移动、旋转、变幅、爬升及伸缩等动作,而这些动作必须由相应的机构来完成。
起重机的基本机构有起升、运行、回转和变幅4个机构。
另外,还有塔吊的塔身爬行机和汽车、轮胎等起重机专用的支腿伸缩机构。
起重机的每个机构均由4种装置组成,即驱动装置、制动装置、传动装置和与机构作用直接相关的专用装置。
驱动装置分人力、机械和液压驱动装置。
制动装置是制动器。
不同类型的起重机使用各种不同型式的块式、盘式、带式、内张蹄式和锥形等制动器。
传动装置是减速器。
不同类型的起重机使用各种不同形式的斜齿轮、蜗轮和行星减速器。
一、起重机的起升机构起升机构的驱动装置采用电力驱动时为电动机。
其中,葫芦起重机多用异步鼠笼式电动机,其他电动起重机多采用绕线式异步电动机,或直流电动机。
履带、铁路起重机的起升驱动装置为内燃机。
汽车、轮胎起重机的起升机构驱动装置是由原动机带动的液压泵、液压油缸或液压电动机。
起升机构包括起升卷筒(或链轮)、钢丝绳(或链条)、定滑轮、动滑轮、吊钩(或抓斗、吊环、吊梁、电磁吸盘)等。
二、起重机的运行机构起重机的运行机构可分为轨行式运行机构和无轨行式运行机构(轮胎、履带式运行机构),这里只介绍轨行式运行机构。
轨行式运行机构除了铁路起重机以外,基本上都是电动机驱动形式。
此运行机构是由电动机、制动器、减速器和车轮四部分组成。
车轮装置由车轮、车轮轴、轴承及轴承箱等组成。
采用无轮缘车轮,是为了将轮缘的滑动摩擦变为滚动摩擦,此时应增设水平导向轮。
车轮与车轮轴的连接可采用单键、花键或锥套等多种方式。
起重机的运行机构分为集中驱动和分别驱动2种形式。
集中驱动是由一台电动机通过传动轴驱动两边车轮转动运行的运行机构形式,集中驱动只适合小跨度的起重机或起重小车的运行机构。
起重机的运用原理
起重机的运用原理主要基于物理学中的几个基本原理:
1. 杠杆原理:起重机中的臂杆是一个典型的杠杆结构。
通过调整臂杆长度和角度,可以实现对物体的力矩的调节,从而实现对物体的运输和起重。
2. 力的平衡原理:起重机通过加入适当的配重和调整配重的位置,使得起重机的重心与吊重物的重心保持一致,以实现稳定的平衡状态。
3. 滑轮原理:起重机中的滑轮系统可以改变物体的运动方向,减小移动力的大小,并且提供了所需的运动速度和力的增益。
4. 斜面原理:起重机中的斜面结构允许物体在斜坡上升或下降,通过调整斜面的角度,可以改变物体受到的重力作用的大小。
5. 动能守恒原理:起重机中的动能守恒原理指的是通过减小物体的动能来提高物体的高度,或者通过增加物体的动能来提高物体的速度。
利用这个原理,起重机可以完成物体的起升、放下、移动等操作。
综上所述,起重机的运用原理主要包括杠杆原理、力的平衡原理、滑轮原理、斜面原理和动能守恒原理。
根据这些原理,起重机可以实现对物体的悬挂、起升、
下降、平移等操作。
起重机的构造和工作原理起重机是一种用于在建筑工程、物流、货物搬运等领域进行起重作业的机械设备。
起重机的构造包括基础架、起重机械臂、输送装置、控制系统等组成部分。
起重机的工作原理是利用电动机或其他动力源驱动起重机械臂运动,通过滚动、回转或起吊货物的运动方式提升、装卸货物。
起重机的构造主要包括以下几个组成部分:1. 基础架:起重机械设备的基础,通常由混凝土浇筑而成,用于支撑整个起重机的重量和提供稳定的工作平台。
2. 起重机械臂:负责进行货物起升和搬运工作的主要组成部分。
起重机械臂通常由钢材制成,具有一定的承载能力和强度。
3. 输送装置:用于在起重机械臂上移动并进行物料输送的装置。
常见的输送装置包括无轨电动平车、提升机等。
4. 控制系统:起重机的控制核心,用于控制起重机的运动和操作。
控制系统通常采用电气控制方式,通过控制按钮、遥控器或计算机等进行操控。
起重机的工作原理主要分为以下几个步骤:1. 货物定位:起重机在悬空运输货物之前,需要对货物进行准确定位,将起重机械臂放置在正确的位置上。
2. 起升货物:起重机械臂通过电动机或液压系统驱动,将起重装置(如起重钩、夹具等)降低至货物位置,然后进行货物的起升,将货物提升到指定的高度。
3. 拖动或旋转:起重机械臂通过驱动装置进行货物拖动或旋转。
拖动通常通过输送装置实现,旋转则通过起重机械臂的回转装置实现。
4. 放置货物:起重机将货物移动到指定的位置,并进行放置。
放置时要注意货物的稳定性和安全性,避免货物掉落或损坏。
在起重机的工作过程中,需要注意以下几个方面的问题:1. 起重机的安全性:起重机在工作过程中需要确保操作人员的安全,同时还要注意货物的安全,避免发生事故。
2. 负载限制:起重机在起升和搬运货物时,需要根据起重机的规格和承载能力,合理控制货物的重量,避免超负荷运输。
3. 操作规范:起重机操作人员需要熟悉和遵守相关操作规范和安全操作流程,确保安全高效地完成工作任务。
起重机的工作原理
起重机是一种能够快速、高效地起重和搬运重物的机械设备。
它的工作原理主要是通过应用物理学中的杠杆原理和机械传动原理实现的。
起重机通常由起升机构、变幅机构、行驶机构和控制系统等几个主要部分组成。
起升机构是起重机的核心部分,它负责提升和降低重物。
起升机构中主要包括电动机、液压系统、齿轮和钢丝绳等。
当起重机需要提升重物时,电动机启动并通过液压系统或电动机带动齿轮旋转,使钢丝绳缠绕在齿轮上。
随着齿轮的旋转,钢丝绳逐渐上升,从而提起重物。
当需要降低重物时,电动机反向运转,使钢丝绳缓慢放松,从而实现重物的下降。
起升机构的设计使得起重机能够承受和操控各种重量级的物体。
变幅机构用来控制起重机的幅度,即工作半径。
它常常采用伸缩臂或变幅桁架等结构,通过液压系统的收缩和伸展来调整臂的长度或桁架的展开程度。
这样可以使得起重机在不同的工作场景中灵活自如地完成起升和搬运任务。
行驶机构用来实现起重机在工作场地的移动。
它通常由驱动装置、轮胎或履带等构成。
驱动装置可以是内燃机或电动机,通过控制驱动轮的旋转实现起重机的前进、后退以及转弯等动作。
最后,起重机还需要配备相应的控制系统,用来对起升、变幅和行驶等操作进行精密控制。
控制系统可以采用遥控或操作平
台来实现人机交互,操作人员可以根据实际需要调整起重机的运行状态和任务。
总的来说,起重机的工作原理是基于杠杆原理和机械传动原理,通过电动机、液压系统、齿轮和钢丝绳等组件的相互配合,实现对重物的起升、降低、移动和调整等功能。
起重机的高效运行使其在工业、建筑和物流等领域中得到广泛应用。
起重机的工作原理
起重机是一种用于搬运重物的机械设备,它的工作原理是通过电动机或其他动力源驱动机械部件,将重物从一个地方移动到另一个地方。
起重机的工作原理可以分为以下几个方面:
1. 机械部件的运动原理
起重机的机械部件包括起重臂、钩、滑轮、钢丝绳等。
这些部件的运动原理是通过电动机或其他动力源驱动,使起重臂上的钩和钢丝绳向上或向下运动,从而实现重物的搬运。
2. 电动机的工作原理
起重机的电动机是起重机的动力源,它的工作原理是将电能转化为机械能,驱动机械部件运动。
电动机的转速和扭矩可以通过控制电流大小和方向来实现。
3. 控制系统的工作原理
起重机的控制系统包括电气控制系统和液压控制系统。
电气控制系统通过控制电动机的电流大小和方向来控制机械部件的运动。
液压控制系统通过控制液压油的流量和压力来控制机械部件的运动。
控制系统的工作原理是将操作员的指令转化为电气信号或液压信号,通过控制电动机或液压系统来实现机械部件的运动。
4. 安全保护系统的工作原理
起重机的安全保护系统包括限位器、重载保护器、断电保护器等。
这些保护器的工作原理是通过检测机械部件的位置、重量、电流等参数,当超过设定值时,自动停止机械部件的运动,保护起重机和操作员的安全。
起重机的工作原理是通过电动机或其他动力源驱动机械部件,将重物从一个地方移动到另一个地方。
控制系统和安全保护系统的作用是保证起重机的安全和稳定运行。
龙门式起重机的结构与工作原理分析龙门式起重机是一种常见的起重设备,其结构和工作原理非常重要。
本文将对龙门式起重机的结构和工作原理进行详细分析。
一、结构分析龙门式起重机主要由以下几部分组成:1. 上部结构:上部结构由主梁、主梁支撑和配重系统组成。
主梁是起重机的主要承重部分,上面安装有起重机的起重机构。
主梁支撑系统主要用于支撑和稳定上部结构。
配重系统用于平衡起重机吊钩和负载的重量,确保起重机的稳定性。
2. 起重机构:起重机构在龙门上移动,并且用于吊起和放下重物。
起重机构包括主钩、副钩、起升机构和运行机构。
主钩主要负责吊起和放下重物,副钩用于辅助吊运重物。
起升机构用于控制主钩和副钩的上升和下降。
运行机构包括起重机的移动和平移机构,用于将起重机移动到需要的位置。
3. 控制系统:控制系统是龙门式起重机的核心部分,包括电气控制系统和液压控制系统。
电气控制系统用于控制机械操作,如起升、行走和平移。
液压控制系统用于控制液压缸的运动,以实现机械的升降、伸缩和夹紧。
二、工作原理分析1. 吊重物:起重机的工作原理是通过起升机构将钩子下降到需要的位置,然后吊起重物。
起升机构通过电机和传动装置提供动力,控制钩具的运动。
当起升机构启动时,电机驱动传动装置带动钢丝绳或链条的升降,使得钩具在垂直方向上完成升降动作。
2. 移动和平移:龙门式起重机可以通过运行机构在工作场地上灵活移动和平移。
运行机构包括起重机的移动和平移机构。
移动机构使起重机沿轨道或轮胎行走,从一个工作区域移动到另一个工作区域。
平移机构使起重机在主梁范围内水平平移,以适应不同的工作需求。
3. 稳定性和安全性:龙门式起重机的结构设计保证了其稳定性和安全性。
主梁和主梁支撑系统能够承受起重机的重量和吊载荷的重量,确保起重机在工作过程中不会倾覆。
配重系统用于平衡起重机的重心,保持其稳定性。
此外,起重机还配备了安全装置,如限位器、重载保护器和防止碰撞的装置,以保障操作人员和设备的安全。
起重机的原理
本文介绍了起重机的原理,包括其工作原理、构造原理及安全原理等。
起重机工作原理:
起重机是一种用来提升重物的机器,它的工作原理是:将重物放在起重机的滑车上,然后拉动起重机的起升机构,滑车就会把重物提升到指定高度。
构造原理:
起重机主要由起重机主机、滑车、起升机构组成,起重机主机主要由发动机、起升机构及控制板组成;滑车由轴承、滑轨及滑车组成,用来支撑、滑运和固定物料;起升机构又以电动葫芦和行星减速机组成,它们的统一控制下,可以控制起重机的升降运动。
安全原理:
起重机的安全原理主要是双重保护,通过设置安全装置来保证起重机在运行过程中的安全。
起重机安全装置一般有液压减震装置、安全缓冲装置、制动装置、漏电保护装置、防护装置等,它们对起重机的安全操作起到了重要作用。
总之,起重机的工作原理、构造原理及安全原理都很重要,为保证起重机的安全使用,在使用起重机的时候,应该特别注意安全操作。
- 1 -。
起重机的结构与运作原理起重机是一种用于在狭小或高空环境下进行物品搬运的机械设备,在工业领域中得到了广泛应用。
不同类型的起重机,其结构和运作原理也各不相同。
本文将简要介绍起重机的结构和运作原理。
一、起重机的结构起重机的结构主要由以下几个部分组成:1.起重机的主体起重机的主体通常由钢结构和滑轮系统组成,钢结构是承受全机载荷、传递荷载和自重的骨架。
而滑轮系统是起重机起升货物的关键部分,滑轮通过链条或钢丝绳与货物连接,当电机带动滑轮系统旋转时,货物就会被提升或下降。
2.起重机的电机起重机的电机是起重机动力系统的核心,它的功率大小影响到起重机的起重能力。
电机一般分为交流电机和直流电机,其中直流电机的转速可以控制,因此在大型起重机中得到广泛应用。
起重机的电机通常采用过载保护开关、位移限制开关等控制装置。
3.起重机的控制系统起重机的控制系统通常由控制柜、按钮和各种安全开关组成。
控制柜是起重机的大脑,能够控制和监测电机和传动系统的工作状态,通过按钮可以实现起升、下降、前后移动等操作。
4.起重机的配重系统起重机的配重系统一般由铁块和水泥块等物料组成,它的主要作用是平衡滑轮组的倾斜力矩,保证起重机在工作时稳定可靠。
配重系统根据不同型号的起重机,其重量和形状也是不一样的。
二、起重机运作的原理起重机的运作原理非常复杂,它的主要原理包括电气控制原理、机械原理、液压原理和空气传动原理等。
以下是几种常见类型的起重机的运作原理:1.桥式起重机的原理桥式起重机的原理和汽车起重机和塔式起重机较为相似。
它在一侧架起一个抵平支柱式的铁路架空桥,通过电驱动装置沿轨道移动,将货物从一侧方向运输到另一侧,起升限度与跨度相关。
2.门式起重机的原理门式起重机通过结构稳定的铰链门框,电机吊装钢丝绳、钩具等物料,从门框之间移动并升降,将物品吊装到需要的高度。
3.塔式起重机的原理塔式起重机是一种独立式的起重设备,其主要由塔架、起重臂和起重机主机几个部分组成。
起重机的机械运动原理
起重机的机械运动原理基本上是通过力的平衡来实现的。
起重机有许多不同的种类,但它们都包含以下几个基本组成部分,这些组成部分协同工作以使起重机能够完成提升货物的任务。
1. 主梁(Boom):主梁是起重机的基本框架,它由坚固的钢材构成,用于支撑其他组件。
主梁可以上下移动,使起重机具备变幅的能力。
2. 升降机构:升降机构是起重机提升货物的关键部分,它通常由一个起重机钩和钢丝绳组成。
电动机通过转动齿轮传动系统使钢丝绳上升或下降,从而提升或放下货物。
3. 变幅机构:变幅机构使起重机的主梁能够左右移动,改变作业范围。
变幅机构通常由电动机和齿轮传动系统驱动,使主梁能够360度无限制的旋转。
4. 行走机构:行走机构使起重机能够在作业场地内移动。
它通常由汽车引擎或电动机驱动,通过轮胎或履带等装置使起重机前进、后退和转动。
5. 驱动系统:起重机的驱动系统主要由电动机、减速器、液压系统等组成。
电动机提供动力,减速器减速传递动力,液压系统实现各个部件的精确控制。
通过这些组成部分的协同工作,起重机能够实现货物的提升、放下、移动和旋转
等操作。
不同类型的起重机可能具有不同的机械运动原理,但基本原理通常是相似的。
起重机的原理
起重机的原理是利用机械、电气和液压等力学原理,通过各种组件协同工作,实现物体的升降、水平移动和运输等功能。
起重机的基本组成包括以下部分:起重机架、起重机臂、起重机钩、起重机大车、小车和行走机构等。
起重机架是起重机的基础支撑结构,通常由钢材焊接而成。
起重机臂是起重机用来伸展和收缩的装置,通过伸缩杆和其他联动机构实现。
起重机钩是用来悬挂和固定物体的附件,固定在起重机臂的末端部位。
起重机大车是指横跨在起重机架上的移动装置,可以使起重机做水平移动,用来调整钩的位置。
小车是安装在大车上的装置,用来使起重机钩做纵向移动,从而实现物体的升降。
行走机构是起重机的行走装置,可以使起重机在工地各处灵活移动。
起重机的工作原理是通过电机或液压装置提供动力,驱动各个组件协同工作。
起重机大车和小车通过电机驱动滑轮或齿轮,使起重机臂和钩进行升降和水平移动。
行走机构通过电机或液压助力,推动起重机在地面上行走。
起重机的操作通常由操作员通过遥控器或控制台进行控制。
操作员可以通过控制器控制起重机的各个组件的运动方向、速度和停止等动作,从而实现对起重机的精确控制。
总而言之,起重机的原理是通过机械、电气和液压等力学原理,
通过协同工作的各个组件,实现物体的升降、水平移动和运输等功能。
龙门式起重机结构与工作原理分析龙门式起重机是一种常见的起重设备,它具有稳定性强、运行灵活、承重能力大等特点。
下面将为您分析龙门式起重机的结构和工作原理。
一、结构分析:龙门式起重机主要由龙门架、主横梁、起重机构、电气控制系统等组成。
1. 龙门架:龙门架是起重机的主体结构,由上部和下部构成,上部通常由两根立柱和横梁组成,下部由轨道、支撑架、传动装置等组成。
龙门架的结构具有足够的强度和刚度,能够承受起重机的工作负荷。
2. 主横梁:主横梁位于龙门架上方,它是起重机的承载梁,能够沿龙门架上下移动。
主横梁的两端设有小车,起重机通过小车沿主横梁水平移动,从而实现载重物体的左右移动。
3. 起重机构:起重机构是起重机的核心部分,主要由起重机钩、卷筒、钢丝绳等组成。
起重机通过起重机钩将重物吊起,升降等操作通过卷筒和钢丝绳来实现。
起重机具有多种工作制式,如行车式、悬挂式、可移式等,能够适应不同的工作要求。
4. 电气控制系统:电气控制系统是起重机的控制中心,主要由电动机、传感器、控制柜等组成。
通过电气控制系统,可以实现起重机的启停、运行速度的调节、重物的升降等功能,提高了起重机的安全性和稳定性。
二、工作原理分析:龙门式起重机的工作原理是基于机械原理和杠杆原理的。
1. 起重机的起重原理:当起重机启动时,电动机通过传动装置驱动卷筒将钢丝绳卷起使起重机钩上升,实现对重物的吊起。
卷筒上的防抱死装置可以防止钢丝绳抱死,保障起重过程的安全。
2. 起重机的横向移动原理:起重机的横向移动主要通过主横梁上的小车来实现。
小车由电动机驱动,通过传动装置带动起重机沿主横梁水平移动。
小车的驱动方式可以是电动驱动或手动驱动,可以根据不同工作环境和要求进行选择。
3. 起重机的纵向移动原理:起重机的纵向移动主要通过龙门架上的升降装置来实现。
升降装置通常由液压缸或电动机驱动,通过起重机的运行控制实现起重机的升降。
起重机的升降速度可以通过控制装置进行调节,以满足不同的工作需求。
起重机结构原理
起重机是一种用于吊运重物的机械设备,其结构由吊臂、起重机构、行走机构和控制系统组成。
起重机的吊臂是起重机的主体部分,通常由一根或多根可以伸缩的臂杆组成。
吊臂上安装有由轮组成的起升机构,用于吊装和卸载物体。
起重机的起重机构包括卷扬机构和钢丝绳组成。
卷扬机构是用来操纵起重钩的装置,它通过电动机或液压系统提供动力,带动起重钩卷起或放出钢丝绳,实现物体的升降运动。
钢丝绳是用于吊装物体的关键部件,通过卷扬机构和起重钩将其固定在吊臂的终端。
起重机的行走机构是用来移动起重机的装置,通常由履带、车轮或脚轮组成。
行走机构通过电动机或液压系统提供动力,使起重机能够在工地上自由移动。
起重机的控制系统是用来控制起重机的运动和操作的系统,包括控制柜、电气设备和传感器。
操作人员通过控制柜中的按钮和杆杆,对起重机的起重机构和行走机构进行控制,实现起重作业的安全和高效进行。
起重机的工作原理是利用重力和力学原理进行的。
起重机构通过升降物体的方式改变物体所受的重力,通过行走机构将物体从一个位置转移到另一个位置。
整个起重机的结构和工作原理相互配合,使得起重机能够完成吊运重物的任务。
总之,起重机的结构原理包括吊臂、起重机构、行走机构和控制系统。
它们相互配合,通过重力和力学原理实现起重作业的功能。