长春理工大学DSP课本课后习题答案
- 格式:docx
- 大小:55.35 KB
- 文档页数:6
DSP原理及应用课后习题答案简述DSP芯片的主要特点哈彿结构•一将程序和数据存储在不同的存赭空河中.即程序存储器和数据存储器足两个相互独立的存赭器.毎个存储器独立编址.独立访问.多总线结构…保证在一个机器周期内可以多次访问程序存僦空何和数据存储空何.揣令系统的流水线操作••减少描令执行时仙・增强处理器的处理能力•取址.译码.取操作和执行四个阶段。
少用的礎件乘法器••使乘法累加运畀能在单个周期内完成.特殊的DSP描令.抉速的描令周期、玦件配18强。
详细描述冯诺依曼结构和哈佛结构,并比较不同?河诺依曼结构••数据和程序共用总线和存储空间.在某一时刻.只能谀写程序或者饯写数据.将播令.数据、地址存储在同一个存储器统一編址.依鏗折令计数器提供的地址来区分是描令•数据还是地址•取揣令和IR操作数都访问同一存鯨器.数据吞叶率低.哈佛结构••一将程用和数据存储在不同的存赭空徇中.即程序存储器和数据存储器足两个相互独立的存锚器.每个存储器独立编址.独立访问.改进的还允许在程序存储空何和数据存赭空何之间相互传送数据。
DSP系统的设讣过程?确定DSP系统设计的性能描标进行览浓优化与模拟:选择DSP芯片和外用芯片:进行皱件电路的设计:进行软件设计: 逬行软硕件综合调试.请描述TMS320C54X的总线结构?C54X采用先进的哈佛结沟并具有八组总线•其曲立的程序总线和数据总线允许同时渎取描令和操作数.实现高度的并行操作’ 程序总线PB传送从程序存储器来的指令代码和立即数.3组数据总线连按各种元器件.CB和DB总线传送从数据存储器读出的操作数.EB总线传送写入到存储器中的数据•(1分)4组地址总线PAB\CAB\DAB\E.AB传送执行抬令所滞的地址。
TMS320C54X片内存储器一般包括哪些种类?如何配置片内存储器?C54X片内存僦器一般包括两种类型:ROM(只优存锚器).RAM{随机访何存储器人RAM又町分为双访何DARAM和单访问SARAM .简述TMS320C54X芯片的CPU外组成部分及其功能。
非标准答案,仅供参考!简答题非绿色部分的自己组织答案!y(n)为输出。
1、设系统差分方程为y(n)=ay(n-1)+x(n),其中x(n)是输入,当y(0)=0时,试判断系统是否是线性时不变的。
解:按照线性是不变系统定义判断。
由题意可归纳出y(n)=∑an-1-ix(i)i=0n对于线性时不变系统应有线性性:T[α1x1(n)+α2x2(n)]=α1y1(n)+α2y2(n)时不变性:T[x(n-k)]=y(n-k)对于y(n)=∑an-1-ix(i),分别验证是否满足线性性和时不变性。
i=0nT[α1x1(n)+α2x2(n)]=∑an-1-i[α1x1(i)+α2x2(i)]i=0n=∑an-1-iα1x1(i)+∑an-1-iα2x2(i)=α1y1(n)+α2y2(n)i=0i=0nn故知满足线性性。
T[x(n-k)]=∑a(n-k)-1-ix(i)=y(n-k)i=0n-k故知满足时不变性。
所以该系统是线性时不变系统。
y(n)为输出。
2、设系统差分方程为y(n)=ay(n-1)+x(n),其中x(n)是输入,当y(0)=0时,试判断系统是否是线性时不变的。
3、用FFT来分析信号的频谱,若已知信号的最高频率为f h =1.25kHz,要求频率分辨率为△F≤5Hz,试确定:(1)采样间隔 T ;(2)采用基-2FFT的最小样点数 N ,以及与此相对应的最小记录长度;(3)按您确定的参数所获得的实际分辨率。
解:(1)由那奎斯特采样定理知fC≥2fH=2⨯1 .25kHz=2.5kHz,且fC=T,所以T≤4⨯10-5s。
(2)归一化角频率与物理角频率的关系ω=ΩT,其中T为采样周期,自然有 1∆ω=∆ΩT,且∆Ω=2π⨯∆F,由频域采样理论知∆ω=2πN,最终得到:∆ω=2πN=2π⨯∆FT=2π⨯5⨯T⇒N=(5T)显然,当T越大N越小,故而此处取T=4⨯10-5s,上式后得到N=5⨯103。

对数据和函数的存储类别可分为:自动的(auto)、静态的(static)、寄存器的(register)、外部的(extern)。
非线性运算的方法:级数展开法、查表法、混合法DSP实现的一般方法:(1)、在通用的计算机上用软件实现。
(2)、在通用的计算机系统上加上专用的加速处理机实现(3)、在通用的单片机上实现。
(4)、在通用的可编程DSP芯片实现(5)、在专用的DSP芯片实现、(2)简述DSP应用系统的典型构成和特点答:DSP系统的典型结构其工作过程①对输入信号进行带限滤波和抽样;②进行A/D变换,将信号变换成数字比特流;③根据系统要求,DSP芯片对输入信号按照特定算法进行处理;④D/A转换,将处理后的数字样值转换为模拟信号;⑤平滑滤波,得到连续的模拟信号波形特点:接口方便编程方便稳定性好精度高可重复性好集成方便(3)简述DSP应用系统的一般设计过程DSP系统的设计流程:1. 定义系统性能指标 2. 采用高级语言进行性能模拟3. 设计实时DSP应用系统4. 借助开发工具进行软硬件调试 5. 系统集成与独立系统运行设计流程图:TMS320系列DSP芯片的特点:1.采用哈佛结构实现内部总线;2.采用流水线操作实现指令操作;3.乘法采用专用的硬件乘法器实现;4.具有高效的DSP指令哈佛结构的特点:将程序和数据存储在不同的存储空间流水线的特点:采用流水线操作,处理器可以并行处理多条指令,提高CPU工作效率DSP芯片的运算速度指标:指令周期 MAC时间 FFT执行时间 MIPS:每秒执行百万条指令 MOPS:每秒执行百万条操作 MFLOPS:每秒执行百万条浮点操作 BOPS:每秒执行十亿次操作(8)设计DSP应用系统时,如何选择合适的DSP芯片答:DSP芯片的选择要根据实际系统的需要来选择DSP芯片,已达到系统最优化的设计。
所以一般选择DSP芯片要考虑以下因素:芯片运行速度、DSP芯片的价格、DSP芯片的硬件资源、DSP芯片的运算精度、DSP芯片的开发工具、DSP芯片的功耗等因素。

习题1外设接口有通用I/O接口、串行接口、串行外设接口、CAN总线接口、外部总线接口、模数转换接口。
片内外设有事件管理器模块,模数转换模块、串行通信模块、串行外设接口模块、CAN总线模块。
复位后,置MP/MC 引脚为高电平可以选择外部程序存储器。
可扩展的外部存储器总共有192KW空间,由64KW程序存储空间、64KW数据存储空间、64KW I/O寻址空间三部分组成。
2407片内有10位A/D转化器,最小转换时间500ns.程序存储器SARAM 32KW,起地址范围是0000~0FFFFH.若访问了非法保留的空间,DSP会产生NMI中断。
内核电压是3.3V,I/O口电压是3.3V存储器映射寄存器大部分应设在数据存储器空间中。
外部数据存储器选通引脚DS 低电平有效;外部程序存储器选通引脚PS 低电平有效;外部I/O空间选通引脚IS 低电平有效。
2407是16位定点DSP芯片。
运行的最高时钟频率是40MHz,单机器周期是25ns.片内FLASH是32KW;其数据总线为16根;其地址总线为16根。
习题2可屏蔽中断分两级管理的。
流水线的4个独立操作阶段是取指,译码,取操作数,执行。
PM位移位(乘积移位)的方式是:PM=00:乘积不移位即送到CALU或数据存总线;PM=01:将乘积左移一位,这时实现小数算术运算或小数乘积的调整非常有用;PM=10:将乘积左移四位,这时实现小数算术运算或小数乘积的调整非常有用;PM=11:可使乘积右移六位程序地址产生逻辑使用的硬件有:程序计数器、程序地址寄存器、堆栈、微堆栈和重复计数器。
输入定标部分的作用:输入定标部分把来自存储器的16位数据移位调整后送到32位的CALU中央算术逻辑部分的组成:由中央算数逻辑单元、32位累加器和输出数据定标移位器组成进位位C的进位方式:当相减产生错位,相加不产生进位时,进位C清零;当相加产生进位,相减不产生借位时,进位位C置一软件非屏蔽中断有:INTR,NMI,TRAP.非屏蔽中断有:硬件非屏蔽中断和软件非屏蔽中断应用微堆栈的一些指令:BLDD,BLPD,MAC,MACD,TBLR,TBLW.常见的片内外设模块名称:事件管理器模块、模数转换模块、串行通信模块、串行外设接口模块、CAN总线模块影响中断响应延时的因素是:外设同步接口时间、CPU响应时间和IRS转移时间中央处理单元(CPU)包括:输入定标部分、乘法部分、中央算术逻辑部分、辅助寄存器算术单元和状态寄存器2407有8级硬件堆栈,默认状态下,STACK段的大小是400字2407有1级,16位宽的硬件微堆栈。
](https://uimg.taocdn.com/de7b1837647d27284a73510a.webp)
第一章引言1. 一个存储单元有哪两个属性?寄存器与存储器有什么不同?一个存储单元的两个属性是:地址与值。
寄存器是特殊的存储器,读写寄存器可引发相关电路的动作。
2. 由单片机构成的最小系统有哪几部分构成?由单片机构成的最小系统包括电源和晶体振荡器。
3. DSP是哪三个英文词的缩写?中文意义是什么?DSP是Digital Signal Processor的缩写,中文意义是数字信号处理器。
4. 哈佛结构计算机与冯∙诺伊曼结构计算机有什么差别?哈佛结构计算机有独立的数据总线和程序总线,冯∙诺伊曼结构计算机数据和程序共用一套总线。
5. 微控制器与微处理器有什么不同?微控制器内部可固化程序,而微处理器内部不含程序。
6. TMS320LF24xA系列单片机有几套总线?分别起什么作用?总线中数据线和地址线分别有多少条?最大可以访问多少存储单元?每个存储单元由多少位组成?TMS320LF24xA系列单片机有三套总线,分别是程序读总线、数据读总线和数据写总线。
每套总线中各有16条数据线和16条地址线,最大可以访问64K个存储单元,每个存储单元由16位组成。
7. 什么是操作码?什么是操作数?操作码用于表示指令所要执行的动作,操作数表示指令所涉及的数据。
8. 实现一条指令的功能要经过哪四个阶段?CPU为什么要采用流水线结构?实现一条指令的功能要经过“取指”、“译码”、“取操作数”和“执行”四个阶段,CPU采用流水线结构可以同时使多条指令处于不同的处理阶段,实现并行处理,提高CPU的指令吞吐率。
第二章寻址方式与主要寄存器操作1. 有哪三种寻址方式?三种寻址方式是:立即数寻址、直接寻址和间接寻址。
2. 指令LACL #10与LACL 10有什么区别?各为什么寻址方式?含义是什么?指令LACL #10将常数10装载到累加器,指令LACL 10将地址10(假设DP为0)处的值装载到累加器。
前者是立即数寻值,操作数在指令中;后者是直接寻址,操作数的地址最低7位在指令中。
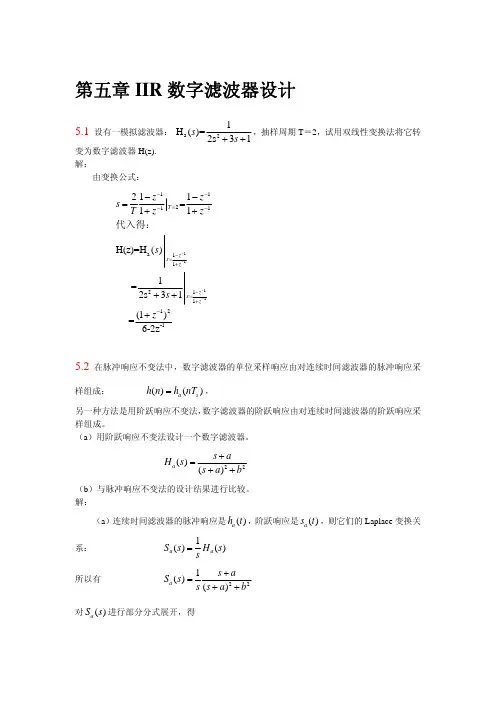
第一章1.简述典型实时数字信号处理系统组成部分。
答:包括:抗混叠滤波器(Anti-aliasing filter)、模数转换器ADC(Analog-to-Digital Converter)、数字信号处理、数模转换器DAC(Digital-to-Analog Converter)和抗镜像滤波器(Anti-image filter) 。
2.简述X86处理器完成实时数字信号处理的优缺点。
答:利用X86处理器完成实时数字信号处理。
特点是处理器选择范围宽,主板及外设资源丰富,有多种操作系统可供选择,开发、调试较为方便;缺点是数字信号处理能力不强,硬件组成较为复杂,系统体积、重量较大,功耗较高,抗环境影响能力较弱。
3.简述数字信号处理器的主要特点。
答:(1)存储器采用哈佛或者改进的哈佛结构;(2)内部采用了多级流水;(3)具有硬件乘法累加单元;(4)可以实现零开销循环;(5)采用了特殊的寻址方式;(6)高效的特殊指令;(7)具有丰富的片内外设。
4.给出存储器的两种主要结构,并分析其区别。
答:存储器结构分为两大类:冯·诺依曼结构和哈佛结构。
冯·诺依曼结构的特点是只有一个存储器空间、一套地址总线和一套数据总线;指令、数据都存放在这个存储器空间中,统一分配地址,所以处理器必须分时访问程序和数据空间。
哈佛结构程序存储器空间和数据存储器空间分开,具有多套地址、数据总线,哈佛结构是并行体系结构,程序和数据存于不同的存储器空间,每个存储器空间独立编址、独立访问。
5.简述选择数字信号处理器所需要考虑的因素。
答:应考虑运算速度、算法格式和数据宽度、存储器类型、功耗和开发工具。
6.给出数字信号处理器的运算速度指标,并给出其具体含义。
答:常见的运算速度指标有如下几种:(1)指令周期:执行一条指令所需的最短时间,数值等于主频的倒数;指令周期通常以ns(纳秒)为单位。
例如,运行在200MHz的TMS320VC5510的指令周期为5ns。
一.填空题(本题总分12 分,每空1 分)1.累加器A 分为三个部分,分别为;;。
1.AG,AH,AL2.TMS320VC5402 型DSP 的内部采用条位的多总线结构。
2.8,163.TMS320VC5402 型DSP 采用总线结构对程序存储器和数据存储器进行控制。
3.哈佛4.TMS329VC5402 型DSP 有个辅助工作寄存器。
4.8 个5.DSP 处理器TMS320VC5402 中DARAM 的容量是字。
5.16K 字6.TI 公司的DSP 处理器TMS320VC5402PGE100 有个定时器。
6.27.在链接器命令文件中,PAGE 1通常指存储空间。
7.数据8.C54x 的中断系统的中断源分为中断和中断。
8.硬件、软件1.TI 公司DSP 处理器的软件开发环境是。
1.答:CCS(Code Composer Studio)2.DSP 处理器TMS320VC5402 外部有根地址线。
2.答:20 根3.直接寻址中从页指针的位置可以偏移寻址个单元。
3.答:1284.在链接器命令文件中,PAGE 0 通常指存储空间。
4.答:程序5.C54x 系列DSP 处理器中,实现时钟频率倍频或分频的部件是。
5.答:锁相环PLL6.TMS320C54x 系列DSP 处理器上电复位后,程序从指定存储地址单元开始工作。
6.答:FF80h7.TMS320C54x 系列DSP 处理器有个通用I/O 引脚,分别是。
7.答:2 个,BIO 和XF8.DSP 处理器按数据格式分为两类,分别是;。
8.答:定点DSP 和浮点DSP9.TMS329VC5402 型DSP 的ST1 寄存器中,INTM 位的功能是。
9.答:开放/关闭所有可屏蔽中断10.MS320C54X DSP 主机接口HPI 是位并行口。
10.答:81.在C54X 系列中,按流水线工作方式,分支转移指令的分为哪两种类型:;。
1.答:无延迟分支转移,延迟分支转移3.C54x 的程序中,“.bss”段主要用于。
1 .1 数字信号处理器与一般通用计算机和单片机的主要差别有哪些答:在通用的计算机上用软件实现该方法速度太慢, 适于算法仿真;在通用计算机系统上加上专用的加速处理机实现该方法专用性较强,应用受限制,且不便于系统的独立运行;用通用的单片机实现这种方式多用于一些不太复杂的数字信号处理,如简单的PID控制算法;用通用的可编程DSP芯片实现与单片机相比,DSP芯片具有更加适合于数字信号处理的软件及硬件资源,可用于复杂的数字信号处理算法;用专用的DSP芯片实现在一些特殊场合, 要求信号处理速度极高, 用通用的DSP 芯片很难实现,而专用的DSP 芯片可以将相应的信号处理算法在芯片内部用硬件实现,不需要编程。
1 .4 什么是冯·诺埃曼结构计算机, 什么是哈佛结构计算机, 二者的特点是什么答:冯.诺曼结构:将指令、数据存储在同一个存储器中,统一编址,译稿指令计数器提供的地址来区分是指令还是数据。
取指令和取数据都访问统一存储器,数据吞吐率低。
哈佛结构:程序和数据存储在不同的存储空间,程序存储空间和数据存储空间是两个相互独立的存储空间,每个存储空间独立编址,独立访问。
1 .8 DSP的工作电压越来越低,内核电压已低至1V,这样做有何意义为什么DSP内核工作电压和I/O工作电压不一样答:集成电路速度越来越快,随之而来,功耗越来越大,这样散热就是很大的问题.在芯片走线尺寸不变的情况下,内部阻抗也不变,降低工作电压会降低功耗,这样能再较高频率下芯片发热较少。
内核不容易受到外部干扰,所以电压可以做的较低,但IO容易受外部信号干扰,保持较高电压容易是器件工作稳定,这是功耗和稳定性的折中。
1 .10 定点DSP和浮点DSP有什么区别在具体应用中, 应如何选择答:在浮点DSP中,数据即可以表示成整数,也可以表示成浮点数。
浮点数在运算中,表示数的范围由于其指数可自动调节,因此可避免数的规格化和溢出等问题。
但浮点DSP 一般比定点DSP 复杂, 成本也较高。
第一章F28x简介1. 什么是DSP,它有什么用处?答:DSP是数字信号处理器(Digital Signal Processor ),是特别适合于实现各种数字信号处理运算的微处理器。
主要应用场合:(1)数字信号处理运算,(2)通信,(3)网络控制及传输设备,(4)语音处理,(5)电机和机器人控制,(6)激光打印机、扫描仪和复印机,(7)自动测试诊断设备及智能仪器仪表、虚拟仪器,(8)图像处理,(9)军事,(10)自动控制等。
2. 写出以下缩写词的中英文全称DSP、MIPS、MOPS、MFLOPS、MACS、XINTF、JTAG、MSPS、UART 答:DSP :Digital Signal Processor,数字信号处理器。
MIPS:Millions of Instruction Per Second,即每秒执行的百万条指令MOPS:Millions of Operation Per Second,每秒执行的百万条操作MFLOPS:Millions of Float Operation Per Second,每秒执行的百万次浮点运算MACS:MACS是指DSP在1秒内完成乘-累加运算的次数XINTF:External Interface ,外部接口。
JTAG:Jiont Testable Action Group,联合测试行动组。
MSPS:Million Samples per Second,每秒采样的百万次数。
UART:Universal Asynchronous Receiver/Transmitter,通用异步接收/发送器。
3. 什么是定点DSP芯片和浮点DSP芯片,各有什么优缺点?答:定点DSP芯片按照定点的数据格式进行工作,其数据长度通常为16位、24位、32位。
定点DSP的特点:体积小、成本低、功耗小、对存储器的要求不高;但数值表示范围较窄,必须使用定点定标的方法,并要防止结果的溢出。
第一章:答:数字信号处理的实现是用硬件软件或软硬结合的方法来实现各种算法。
(1 在通用的计算机上用软件实现;(2 在通用计算机系统中加上专用的加速处理机实现;(3 用通用的单片机实现,这种方法可用于一些不太复杂的数字信号处理,如数字控制;(4 用通用的可编程DSP 芯片实现。
与单片机相比,DSP 芯片具有更加适合于数字信号处理的软件和硬件资源,可用于复杂的数字信号处理算法;(5 用专用的DSP 芯片实现。
在一些特殊的场合,要求的信号处理速度极高,用通用DSP 芯片很难实现(6)用基于通用dsp 核的asic 芯片实现。
答:第一阶段,DSP 的雏形阶段(1980年前后)。
代表产品:S2811。
主要用途:军事或航空航天部门。
第二阶段,DSP 的成熟阶段(1990年前后)。
代表产品:TI 公司的TMS320C20 主要用途:通信、计算机领域。
第三阶段,DSP 的完善阶段(2000年以后)。
代表产品:TI 公司的TMS320C54主要用途:各个行业领域。
答:1、采用哈佛结构(1)冯。
诺依曼结构,(2)哈佛结构(3)改进型哈佛结构2、采用多总线结构3. 采用流水线技术4、配有专用的硬件乘法-累加器5、具有特殊的dsp 指令6、快速的指令周期7、硬件配置强8、支持多处理器结构9、省电管理和低功耗答:哈佛结构:该结构采用双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,大大地提高了数据处理能力和指令的执行速度,非常适合于实时的数字信号处理。
冯。
诺依曼结构:该结构采用单存储空间,即程序指令和数据共用一个存储空间,使用单一的地址和数据总线,取指令和取操作数都是通过一条总线分时进行。
当进行高速运算时,不但不能同时进行取指令和取操作数,而且还会造成数据传输通道的瓶颈现象,其工作速度较慢。
区别:哈佛:该结构采用双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,大大地提高了数据处理能力和指令的执行速度,非常适合于实时的数字信号处理。
习题1外设接口有通用I/O接口、串行接口、串行外设接口、CAN总线接口、外部总线接口、模数转换接口。
片内外设有事件管理器模块,模数转换模块、串行通信模块、串行外设接口模块、CAN总线模块。
复位后,置MP/MC 引脚为高电平可以选择外部程序存储器。
可扩展的外部存储器总共有192KW空间,由64KW程序存储空间、64KW数据存储空间、64KW I/O寻址空间三部分组成。
2407片内有10位A/D转化器,最小转换时间500ns.程序存储器SARAM 32KW,起地址范围是0000~0FFFFH.若访问了非法保留的空间,DSP会产生NMI中断。
内核电压是3.3V,I/O口电压是3.3V存储器映射寄存器大部分应设在数据存储器空间中。
外部数据存储器选通引脚DS 低电平有效;外部程序存储器选通引脚PS 低电平有效;外部I/O空间选通引脚IS 低电平有效。
2407是16位定点DSP芯片。
运行的最高时钟频率是40MHz,单机器周期是25ns.片内FLASH是32KW;其数据总线为16根;其地址总线为16根。
习题2可屏蔽中断分两级管理的。
流水线的4个独立操作阶段是取指,译码,取操作数,执行。
PM位移位(乘积移位)的方式是:PM=00:乘积不移位即送到CALU或数据存总线;PM=01:将乘积左移一位,这时实现小数算术运算或小数乘积的调整非常有用;PM=10:将乘积左移四位,这时实现小数算术运算或小数乘积的调整非常有用;PM=11:可使乘积右移六位程序地址产生逻辑使用的硬件有:程序计数器、程序地址寄存器、堆栈、微堆栈和重复计数器。
输入定标部分的作用:输入定标部分把来自存储器的16位数据移位调整后送到32位的CALU中央算术逻辑部分的组成:由中央算数逻辑单元、32位累加器和输出数据定标移位器组成进位位C的进位方式:当相减产生错位,相加不产生进位时,进位C清零;当相加产生进位,相减不产生借位时,进位位C置一软件非屏蔽中断有:INTR,NMI,TRAP.非屏蔽中断有:硬件非屏蔽中断和软件非屏蔽中断应用微堆栈的一些指令:BLDD,BLPD,MAC,MACD,TBLR,TBLW.常见的片内外设模块名称:事件管理器模块、模数转换模块、串行通信模块、串行外设接口模块、CAN总线模块影响中断响应延时的因素是:外设同步接口时间、CPU响应时间和IRS转移时间中央处理单元(CPU)包括:输入定标部分、乘法部分、中央算术逻辑部分、辅助寄存器算术单元和状态寄存器2407有8级硬件堆栈,默认状态下,STACK段的大小是400字2407有1级,16位宽的硬件微堆栈。
2407中,ARO作为间接寻址寄存器,可寻址的数据存储器空间是64KW,寻址的地址空间范围是0000H~0FFFFH2407有8个辅助寄存器。
2407的RS信号为低电平系统复位。
DSP有16位地址总线,通过该地址总线可访问3个可独立访问的空间,分别是:程序存储器64KW,数据存储器64KW,输入/输出空间64KW.2407中,有3个DARM块,分别是B0,B1,B22407中,B0 DARAM块可配置成数据存储单元或程序存储单元。
2407中,DARAM共有544字。
2407中,数据存储器分为512页,数据页面指针DP的取指范围是0~511优先级最高的中断是复位中断。
如果DP=8,可访问的数据存储器范围是0400~047FHCPU提供了6个可屏蔽中断。
DSP采用一个16*16位的硬件乘法器,可以在1个机器周期内产生一个32位的乘积结果的有符号数或无符号数。
(选择)数据存储器中存储的最大的有符号正整数是7FFFH.(选择)当OVM=0时,(ACC)=80000000H,执行ABS指令,则ACC的值为80000000H(选择)2407中,有两个外部引脚XINT1和XINT2,可以是上升沿或者下降沿产生中断。
(选择)重复计数器RPTC是8或16位。
(选择)XF态位可以是硬件引脚(选择)2407中,PREG寄存器是32位的习题3简述几种指令寻址方式并举例说明:三种寻址方式:立即寻址,直接寻址,间接寻址立即寻址:RPT #99直接寻址:ADD 9H,5间接寻址:ADD*+,8,AR4(选择)2407中,应用外部总线扩展I/O口空间时,可应用的I/O口地址范围是0000H~FEFFH 运用汇编语言,将数据存储器0060H中的数据高八位和低八位进行交换,将结果村人0061H:LAR AR0,#60HLARP 0LACC *,8SACH *OR *+SACL *运用汇编语言,将数据存储单元006H~0067H的内容进行累加,并将结果存入006EH起始地数据存储器,先低后高:LAR AR0,#60HLAR AR1,#7LARP #0LACC #0LOO,P: ADD *+,AR1BANZ LOOP,AR0LAR AR0,#6EHSACL *+SACH *运用汇编语言,将数据存储器0060H~006FH的内容传到第四页的0070H~007FH数据存储器中:LAR AR0,#60HLAR AR1,#270HLAR AR2,#15LARP #0LOOP: LACL *+,AR1SACL *+,AR2BANZ LOOP,AR0系统时钟周期25ns,编写在XF引脚输出方波的程序段,方波信号频率为0.2MHz:STAAT: SETC XFRTP #99NOPCLRC XFRTP #99NOPB START习题52407C语言中,解释ioport 关键字的含义,并举例说明,并对所举例子简单说明:关键字的含义:定义由数据总线和地址总线扩展的外部I/O口。
例如:ioport unsigned int port0000:由数据总线和地址总线扩展的外部I/O口地址是OXOOOO240X设计以改进的哈佛结构为基础;存储空间可由三组16位的并行总线访问,分别是程序地址总线,数据读地址总线,数据写地址总线(选择)2407中,IN,OUT指令可以访问的空间是外扩的64KW I/O空间用6414分别设计2407的64K*16的数据存储器和程序存储器数据存储器程序存储器习题6看门狗复位关键字寄存器*WDKEY,写出复位看门狗语言程序段:*WDKEY=0X55;*WDKEY=0XAA;看门狗(WD)定时器的工作原理及作用:看门狗定时器模块用来监视软件和硬件操作,在软件进入不正确的循环或CPU出现暂时性异常时,WD定时器溢出以产生一个系统复位。
大多数芯片的异常操作和CPU非正常工作的情况,都能通过看门狗的功能清楚和复位。
因此,看门狗的监视功能可能增强CPU的可靠性,以确保系统运行的安全和稳定。
2407中,清WD的过程是先写入55H,再写入AAH,如果CLKOUT=40MHz,则WD最小复位时间是3.28ms看门狗定时器模块的所有寄存器都是8位的习题7通用I/O口功能和特殊功能的设置方法:MCRx(x=A、B、C)相应的位是1,设置成特殊功能;MCRx(x=A、B、C)相应的位是0,设置成I/O功能.DSP共有6个数据和方向控制寄存器PXDATDIR,其功能是高八位决定相应的引脚是输入还是输出,低八位为输出方式时相应的引脚输出电平或输入方式相应的引脚电平。
通用I/O口配置成输入或输出的方法:PxDATDIR(x=A,B,C,DE,F)高8位:0:配置相应的引脚为输入方式。
1:配置相应的引脚为输出方式。
低8位:高8位为0,即为输入式。
0:读相应引脚的值为低电平。
1:读相应的引脚为高平。
低8位:高8位为1,即为输出式;0:置相应引脚的输出为低电平。
1:置相应引脚的输出为高电平。
某系统设计中需要应用到串行通信,外部中断1,并且A口的高5位为输出,初始化后,A口的高5位为输出高电平,B口为输入,初始化之后读入B口状态为低电平,编写通用I/O口A,B口的初始化程序:*MCRA=0X07;*PADATDIR=0XF8F8:*PBDATDIR=0X00;2407有6组数字量I/O端口,分别是A~F,共40个I/O口习题82407中,输入正交编码脉冲电路的两路相位相差90°的方波脉冲,是如何实现四倍频计数的:两列正交输入脉冲的两个边沿都被正交编码脉冲电路计数,因此产生的时钟频率是每个输入序列的4倍,并把这个时钟作为通用定时器2或4的输入时钟。
2407中,连续增减计数模式与定向增减计数模式的主要区别是:连续增减计数模式下计数方向不受引脚TDIRA的状态影响。
2407中,PWM中死区单元的作用:用于保证在任何情况下,每个比较单元相关的2路PWM输出,控制一对正向导通和负向导通设备时没有重叠,即在一个器件未完全关断时,另一个器件不导通。
通用定时器产生的中断有以下几种:上溢,下溢,比较匹配,周期匹配。
DSP事件管理器所包含的模块:通用定时器GP,比较单元,捕获单元CAP,正交编码脉冲电路QEPDSP事件管理器中断组分3组,分别是中断组A,B,CDSP通用定时器有以下几种工作模式:停止/保持模式,连续增计数模式,连续增减计数模式,定向增减计数模式。
应用捕获单元应该注意:(1)不知都捕获对象宽度时,应尽量使用定时器定时最长,如不倍频或128预分频;(2)如超过DSP的最大捕获时间,则用定时器溢出的方法再加软件计数;(3)TMS3202407为3.3V供电,因此捕获引脚输入电平应不超过3.3V(初始化)通用定时器1工作在连续增减计数模式下,预分频系数为128,定时器使能,比较使能,采用内部时钟源,定时器的周期寄存器的值为1000H,计数器初值为0,运用C语言编写定时器1的初始化程序:*GPTCONA=0X41;*TIPR=0X4000;*TICMPR=0X1000;*TICNT=0X0;*TICON=0X0F4E;连续增减计数模式下产生对称的脉宽调制波形;连续增计数模式下产生非对称脉宽调制波形。
运用PWM单元可以产生非对称的脉宽调制波形和对称的脉宽调制波形。
PWM单元的可编程死区时间是0~16微秒PWM单元最小死亡区时间为1个时钟周期。
每个捕获单元都有一个专用的16位的2级FIFO栈,称为顶层栈和底层栈。
正交编码脉冲电路的时基可由通用定时器2或4提供,通用定时器必须工作在定向增/减计数模式下。
捕获单元可定义的跳变检测方式有上升沿,下降沿,上升或下降沿每个事件管理器都有一个QEP电路,QEP电路的外部输入引脚与输入捕获引脚共享,在使能QEP功能时,必须禁止捕获功能。
对于EVA,使用的是通用定时器2,对于EVB,使用的是通用定时器4,且通用定时器必须工作在定向增减计数模式下,并以正交编码脉冲电路作为时钟输入源。
DSP具有4个通用定时器,都采用16位计数器,计数范围是65536个脉冲。
PWM单元的死区单元是3个4位减计数定时器。