编 码 器 (encoder)选型参数简介
- 格式:doc
- 大小:1.55 MB
- 文档页数:4
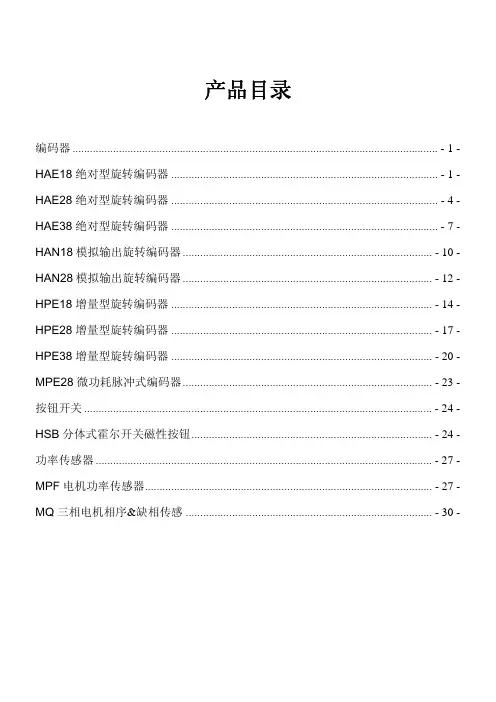
产品目录编码器..............................................................................................................................- 1 - HAE18绝对型旋转编码器............................................................................................- 1 - HAE28绝对型旋转编码器............................................................................................- 4 - HAE38绝对型旋转编码器............................................................................................- 7 - HAN18模拟输出旋转编码器......................................................................................- 10 - HAN28模拟输出旋转编码器......................................................................................- 12 - HPE18增量型旋转编码器..........................................................................................- 14 - HPE28增量型旋转编码器..........................................................................................- 17 - HPE38增量型旋转编码器..........................................................................................- 20 - MPE28微功耗脉冲式编码器......................................................................................- 23 - 按钮开关........................................................................................................................- 24 - HSB分体式霍尔开关磁性按钮...................................................................................- 24 - 功率传感器....................................................................................................................- 27 - MPF电机功率传感器...................................................................................................- 27 - MQ三相电机相序&缺相传感.....................................................................................- 30 -编码器HAE18绝对型旋转编码器特点● 非接触式传感技术 ● 绝对值8、10、12位 ● 电源电压3V 或5V ● 串行数据输出SSI● 本体与外壳一体化结构、强度高 ● 耐环境、耐振、防护等级高● 结构紧凑、体积小、壳体直径仅18mm ● 内置两组滚珠轴承、适合工业环境电气参数机械参数轴承 启动力矩转子惯量 轴容许载荷 容许转速 材质 重量 2组密封 滚珠轴承≤3Ncm≤1gcm 2径向10N 轴向5N3600rpm (机械承受)壳体:铝合金或 不锈钢或铜镀镍 轴:不锈钢铝合金约30g 铜或不锈钢约40g (含标准线)环境条件使用环境温度保存环境温度防护等级耐振动耐冲击-40~+85℃ -40~+85℃IP65 10g(10~2000Hz) 100g (6mS )时序图z 8位:CLK 1 2 3 4 5 67 8910111213141516 17 18 192021读DO L OCK D7D6D5 D4 D3 D2D1D0注释状态位1有效角度值分辨率 电气转角 输出信号 上电响应读取时钟电源屏蔽线 256(8位) <2mS 5V ±10%、16mA 1024(10位) <60mS 4096(12位)360° (机械转角无停止位)串行数据 SSI<80mS≤1MHz3.3V ±10%或 5V ±10%、20mA标准0.3m 特殊0.5mz 10位:z 12位:状态位具有下列配置时才有效OCF COF LIN MagINC MagDEC EvenPAR0 00 11 0 0 1 01~15位的偶校验和符号最小 最大 单位t DO active 100 ns t CLK FE 500 ns T CLK/2 500 ns t DO valid 375 ns t DOtristate 100 ns t CSn 500 ns f CLK >0 1 MHz输出接口电路VDO CLK CS V / V P接线定义电源正Vc电源负0V输入CS 输入CLK输出DO 屏蔽线EAR红黑黄蓝绿粗黑注:屏蔽线内部未接壳体。
编码器技术参数编码器是一种用于测量物理量并将其转换为数字信号的设备,广泛应用于工业自动化、机械领域等。
编码器的技术参数取决于其具体类型和应用场景。
以下是一些常见的编码器技术参数,这些参数可能在不同的编码器类型中有所差异:1.分辨率:定义:分辨率是编码器能够区分的最小位移或角度的量度。
单位:通常以每圈的脉冲数或每毫米的脉冲数表示。
2.精度:定义:精度表示编码器输出值与实际位置之间的误差。
单位:以百分比或特定单位(如角度或长度)表示。
3.脉冲输出类型:定义:脉冲输出的类型,常见的有两相正交信号、单路脉冲、SSI(Synchronous Serial Interface)等。
特点:不同的输出类型适用于不同的应用场景,例如位置控制或速度控制。
4.工作电压:定义:编码器工作所需的电源电压。
范围:典型的工作电压包括 5V、12V 或 24V。
5.工作温度范围:定义:编码器能够正常工作的温度范围。
范围:通常在摄氏度或华氏度下表示,例如 -20°C 到 +85°C。
6.防护等级:定义:编码器外壳的防护等级,表示其对于灰尘、水分、震动等环境的抵抗能力。
示例:IP65 表示防尘、防喷水。
7.最大转速:定义:编码器能够测量的最大转速。
单位:典型的单位包括 RPM(每分钟转数)。
8.安装方式:定义:编码器的安装方式,例如轴向安装、法兰盘安装等。
特点:不同的安装方式适用于不同的机械结构。
9.输出信号类型:定义:编码器输出的信号类型,例如 TTL、HTL 等。
特点:不同的输出信号类型适用于不同的控制系统。
10.抗干扰性能:定义:编码器对于外部干扰的抵抗能力。
特点:对于工业环境中可能存在的电磁干扰具有重要意义。
11.寿命:定义:编码器的使用寿命,通常以小时或循环数表示。
取决于:受材料、工作条件等多个因素影响。
12.通信接口:定义:编码器与其他设备通信的接口,例如 Modbus、Profinet 等。
特点:通信接口决定了编码器的可集成性。
编码器(encoder)选型参数简介传感器—将要测量的物理量转换成可读取、处理的另一个物理量,现代控制中最常用的就是电信号。
如果把计算机、可编程控制器比喻为自动化控制的“大脑”,那么传感器就是自动化控制的“眼睛”,是机电一体化的信息反馈装置.由计算机、执行机构、执行机构内部反馈构成的控制系统,称为开环控制;由计算机、执行机构、执行机构内部反馈、执行效果外部传感器信息反馈构成的控制系统,称为闭环控制。
传感器的电信号有模拟量型和数字量型,模拟量就是电流或电压的大小变化模拟被测量物理量的大小,如果传感器输出的模拟量电信号已经是标准的信号,例如4—20mA、0—20mA、1—5V、0—10V等,这样的传感器有时也称为变送器。
传感器的电信号有时也用电压、电流高于某个域置或低于某个域置来代表1或0的数字信息,或用光信号的通、暗来传递信息,这样的传感器就是数字量输出型。
编码器—角位移,线位移及转速传感器.编码器是以数字化信息将角度、长度的信息以编码的方式输出的传感器,其具有高精度,大量程测量,反应快,数字化输出特点;体积小,重量轻,机构紧凑,安装方便,维护简单,工作可靠。
编码器以测量方式来分,有直线型编码器,角度编码器,旋转编码器。
如以信号原理来分,有增量型编码器,绝对型编码器。
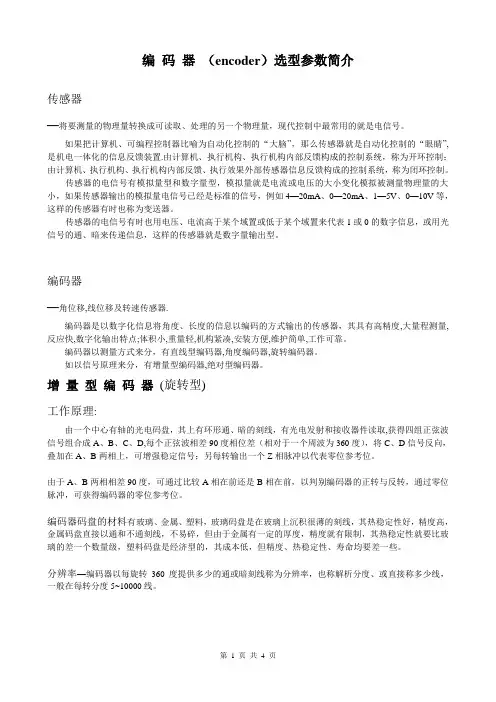
增量型编码器(旋转型)工作原理:由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。
编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。
电机编码器参数1. 什么是电机编码器?电机编码器是一种用于测量电机旋转位置和速度的装置。
它通常由一个光学或磁性传感器和一个编码盘组成。
编码盘上有许多刻线,当电机旋转时,传感器可以通过检测刻线的数量和位置来确定电机的角度和速度。
2. 电机编码器的参数2.1 分辨率电机编码器的分辨率是指它可以测量的最小角度或位置变化。
分辨率通常以每转的刻线数来表示,也可以以每弧度的刻线数来表示。
分辨率越高,编码器的测量精度就越高。
2.2 脉冲数脉冲数是指编码器在一次完整旋转中输出的脉冲数量。
脉冲数可以通过编码盘上的刻线数量来确定,通常以每转的脉冲数来表示。
脉冲数越多,编码器可以提供更精确的位置和速度信息。
2.3 电压输出电机编码器的输出通常是一个模拟电压信号,它的幅度和频率与电机的位置和速度相关。
电压输出可以通过模数转换器(ADC)转换为数字信号,以供控制系统使用。
2.4 接口类型电机编码器的接口类型是指它与控制系统之间的通信方式。
常见的接口类型包括模拟输出、脉冲输出和数字通信接口(如RS-485、CAN等)。
不同的接口类型适用于不同的应用场景,选择合适的接口类型可以提高系统的性能和可靠性。
2.5 工作温度范围电机编码器的工作温度范围是指它可以正常工作的温度范围。
工作温度范围通常由最低工作温度和最高工作温度来表示。
在选择电机编码器时,需要根据实际应用场景的工作温度来确定合适的工作温度范围。
2.6 防护等级电机编码器的防护等级是指它对外界环境的防护能力。
防护等级通常由IP (Ingress Protection)等级来表示,包括两个数字,第一个数字表示对固体物体的防护能力,第二个数字表示对液体物体的防护能力。
选择合适的防护等级可以确保电机编码器在恶劣环境下的可靠性和稳定性。
3. 电机编码器的选择与应用在选择电机编码器时,需要考虑以下几个因素:•应用场景:不同的应用场景对电机编码器的要求不同,需要根据具体应用场景来确定合适的编码器参数。
旋转编码器—基础及注意事项P+F FA 2009.03内容一、编码器分类1.1 增量式编码器 1.2 绝对值编码器 1.3 防爆编码器二、编码器选型注意事项2.1 机械因素 2.2 环境因素 2.3 电气因素三、编码器使用注意事项3.1 安装注意事项 3.2 供电注意事项 3.3 软件设置 3.4 屏蔽的铺设2009.03P+F FAPage 2编码器简介• 什么是旋转编码器?– 把旋转机械参数转换为电气信号输出的数字式传感电子设备 ; – 用于旋转或直线等运动的监测,反馈角度、位置、速度和加速 度等机械参数。
ϕ, ω, n调制光调制电流频率脉冲2009.03P+F FAPage 3一、编码器分类旋转编码器增量型 绝对值单圈 轴套型 实心轴 半空轴 轴套型 实心轴多圈 半空轴防爆编码器:隔爆型、本安型、 防爆编码器:隔爆型、本安型、无火花型2009.03P+F FAPage 41.1 增量式编码器• 增量式编码器– 轴旋转一定角度,提供相应数量的脉冲;单位时间内的脉冲数可以用来 测量轴的转速; – 增量式编码器检测旋转中的相对位置变化时,需要一个参考起点,并进 行脉冲数的累加; 供电或电气受到扰动干扰时,脉冲计数将产生错误; 故障停车后,无法找回事故发生时的位置。
– 最大分辨率5000PPR,200kHz2009.03P+F FAPage 51.1 增量式编码器 – 信号输出• 反向通道– 用于抑制噪声干扰,改善了信号的传输可靠性,选型时优先选择6 通道 输出的编码器;干扰脉冲 信号 反向信号 耦合后的无干扰信号2009.03P+F FAPage 61.1 增量式编码器 – 信号输出• 推挽式输出 推挽式输出:组合了NPN和PNP输出方式– 提高了脉冲的上升沿宽度,改善了脉冲输出特性; – 具有较好的抗干扰能力,高速传输,距离更远; – 适用于中等开关频率范围的应用;• RS 422 线驱动:数据通过互补的两差分通道进行传输和接收 线驱动:– 用于干扰较严重的场合或长距离传输; – 用来替换TTL输出方式时,不使用反向通道;2009.03P+F FAPage 71.2 绝对值编码器• 绝对值编码器– 不产生脉冲,而是一串数据码,为每一个轴的位置提供一个 独一无二的编码数字值; ☺ 减轻了电子接收设备的计算任务; ☺ 当机器合上电源或电源故障后,有位置记忆功能; – 单圈分辨率最高16位(65536步) – 多圈分辨率最高14位(16384圈),总分辨率30位2009.03P+F FAPage 81.2 绝对值编码器 接口分类 绝对值编码器–接口分类: 接口分类: – SSI – AS-I – CANOPEN – DEVICENET – ETHERNET – 并行 – PROFIBUS-DP2009.03P+F FAPage 91.3 防爆编码器• 隔爆型 (Ex d)– 隔爆外壳可以承受爆炸性混合气体爆炸产生的压力,并且可以阻止 爆炸从壳体内传播到壳体外; – 设备可能含有易产生电弧、火花或易燃部件,但能保证爆炸仅限于 设备内部; – 1 区防爆,应用于正常运行时可能会出现气体、粉尘形式的爆炸性混 合物的场所。
code128encoder的options参数摘要:code128编码器的options参数概述正文:code128是一种高性能的连续式条码符号,它可以表示数字、字母和符号。
在使用code128编码器时,我们可以通过设置options参数来调整编码器的性能和特性。
一、code128编码器简介code128编码器是一种高效、可靠的条码生成工具,它可以将文本信息转换为code128条码。
在物流、仓储、生产等领域具有广泛的应用。
二、options参数的作用1.字符集:设置code128编码器支持的字符类型,包括数字、字母、符号等。
常用的字符集有:- ASCII:支持标准ASCII字符集;- Windows-1252:支持扩展ASCII字符集;- ISO-8859-1:支持拉丁文、希腊文等欧洲语言字符;- UTF-8:支持多种语言字符,包括中文、日文、韩文等。
2.纠错级别:设置code128编码器的纠错能力。
根据需要,可以选择不同的纠错级别,以保证在一定程度上的错误情况下,条码仍可被正确识别。
纠错级别分为:- L(最低):纠错能力较低,适用于错误率较低的应用场景;- M(中等):纠错能力适中,适用于一般应用场景;- Q(高):纠错能力较高,适用于错误率较高的应用场景;- H(最高):纠错能力最高,适用于对识别准确性要求极高的场景。
3.编码方式:设置code128编码器生成条码的类型。
编码方式包括:- Code128:标准code128编码,适用于大多数场景;- Code128A:code128A编码,适用于字母和数字较多的场景;- Code128B:code128B编码,适用于字母和数字较少的场景。
4.附加参数:根据实际需求,设置附加参数以满足特定应用场景。
例如:- 设置条码的尺寸、颜色、边框等外观属性;- 设置条码的旋转角度;- 设置是否添加校验码等。
三、options参数的设置方法在使用code128编码器时,根据实际需求,通过调整options参数的值来设置相应的性能和特性。
code128encoder的options参数摘要:code128编码器的options参数介绍与实战应用一、概述code128编码器二、options参数的定义与作用1.字符集2.编码方式3.附加参数三、实战应用案例1.字符集设置2.编码方式选择3.附加参数调整四、总结与展望正文:一、概述code128编码器Code128编码器是一种高效、可靠的条码编码工具,它可以将字符信息转化为可供扫描仪读取的条码图像。
在众多编码器中,code128编码器以其高密度、高信息容量的特点脱颖而出,广泛应用于各种行业。
二、options参数的定义与作用1.字符集字符集是code128编码器中的一个重要参数,它决定了编码后的条码中所包含的字符类型。
常见的字符集包括:ASCII、ISO-8859-1、UTF-8等。
根据实际需求选择合适的字符集,可以确保条码的正确识别。
2.编码方式编码方式指的是code128编码器将字符信息转化为条码的方式。
常见的编码方式有:自动、手动、UTF-8等。
自动编码方式可以根据字符集自动选择合适的编码规则,而手动编码方式则需要用户手动选择编码规则。
3.附加参数附加参数是code128编码器中的一些其他设置,如:符号尺寸、符号颜色、背景颜色等。
这些参数可以根据实际需求进行调整,以满足不同的应用场景。
三、实战应用案例1.字符集设置以UTF-8字符集为例,假设我们要将“你好,世界!”这句诗句编码为条码,可以使用如下代码:```pythonfrom code128encoder import Code128Encoderencoder = Code128Encoder(char_set="UTF-8")encoded_data = encoder.encode("你好,世界!")```2.编码方式选择假设我们要使用自动编码方式,可以使用如下代码:```pythonfrom code128encoder import Code128Encoderencoder = Code128Encoder(auto_encode=True)encoded_data = encoder.encode("你好,世界!")```3.附加参数调整假设我们要将符号尺寸设置为200%,背景颜色设置为白色,可以使用如下代码:```pythonfrom code128encoder import Code128Encoderencoder = Code128Encoder(char_set="UTF-8",auto_encode=True,scale=2,background_color="white")encoded_data = encoder.encode("你好,世界!")```四、总结与展望code128编码器的options参数为用户提供了丰富的设置选项,使得编码后的条码更能满足实际需求。
HT48E06Hopping Encoder(滚动编码器) 文件编码:HA0094S简介Hopping Encoder是将Address Data, Key Data和Rolling Data(hdata)采用DES24加密算法的一种编码方式。
从而实现遥控加密的功能。
其中Key每按一次Rolling Data就会加1。
此次设计采用HT48E06作为控制芯片。
功能介绍Code Format• All CodeLead Code + idata(24-bit) + hdata(24-bit)• Lead Codelow part (8.96ms) + high part(4.48ms)• idata(24-bit)address data(20-bit) + key status data(4-bit)• hdatahdata is rolling data, 每按一次键,hdata加1。
• idata(24-bit) & hdata(24-bit)logic 0low part (560us) + h igh part(560us)• l ogic 1low part (560us) + h igh part (1.68ms)• Repeat Codelow part (8.96ms) + high part (2.24ms) + low part (560us)1应用电路图2流程图3SCAN_KEY Procedure Flowchart4CODE_EDIT Procedure Flowchart5SEND_CODE Procedure Flowchart6程序说明;;***************************************************************;@***** Filename : HOPING_ENCODER.ASM (Remote 4KEY) *****;@************** OSC: 4MHz ********************************;@****************** HT48E06 ***************************;;***************************************************************include ht48e06.inc;@------------------------------------------------;;--- I/O Pin define ---#define pn_RF PC.0 ; Carry Output Port#define pn_RF_C PCC.0 ; Carry Output Port ;;--- Address Define ---HT48E06;#define DATA_RAM 60h;;--- Instruction Define ---123456H#define KEY_DATA_0 56H;#define KEY_DATA_1 34H#define KEY_DATA_2 12H;01234H#define ID_DATA_0 34H#define ID_DATA_1 12H#define ID_DATA_2 00Hdebouce_const equ 1000hdata_ee_start_adr equ 00h;@------------------------------------------------include DE24_1_MEMORY.ASMinclude DE24_1_Encryption.ASMinclude ht48e06_eeprom.ASM;@------------------------------------------------SAMPLE .SECTION 'DATA';; --- Temp RAM ---;;--------- Program RAM --------Accbak db ?Statusbak db ?data_num db ?a_PREV_KEY dB ? ;;Save Previous Key Number a_KEY_NUM dB ? ;;Scan Key NumberdB ?a_KEY_TMPdebouce_counter db 2 dup(?);;--- User FLAG define ---tmr0_flag dbitfg_REPEAT DBIT ;;REPEAT KEY Flag7;;============================================================================== ;@============================== Main Program ================================== ; file name: hoping_encoder.ASM;;============================================================================== SAMPLE_CODE .SECTION at 00h 'CODE'wdtclrMAINjmporg 08haccbak,a ;PUSHmovstatus ;a,movstatusbak,a ;movtmr0_intjmpint_ext:POPstatusbak ;a,movstatus,a ;movaccbak ;a,movreti;@----------------------------------------------------------------------------- tmr0_int:flagsetsettmr0_flag ;jmp int_ext;@----------------------------------------------------------------------------- MAIN:mov a, DATA_RAM ; CLEAR RAMa ;mp0,mov00h-DATA_RAM ;mova,r0 ;clrinc mp0 ;sdz acc ;$-3 ;jmpIOINITIALpac ;setpn_RF_C ;clrpn_RF ;setmov a, 05h ; enable timer0 interrupta ;movintc,mov a, 85h ; timer0 counter cycle = 35/(4MHz/64) = 560usa ;mov tmr0c,00h-35 ;a,mova ;movtmr0,POLLING_EVENT:keyscancall key_scan ;8sz a_KEY_NUM ; if no key, skip to sleep part $+2 ;jmpsleep_section ;jmpsnz fg_REPEAT ; if repeat key, skip to send_part call code_edit ;codesendcall send_code ;sleep_section:cpla pa ; if no key, enter halta,0fh ;andsnz z ;jmp POLLING_EVENT ;halt ;POLLING_EVENT ;jmp;@----------------------------------------------------------------------------- key_scan:wdtckearclrwdt ;a_KEY_NUMcleara_KEY_NUM ;clrmov a, pa ; check if key press or not a,0fh ;and0fh ;a,xorz ;snzkey_press ;jmpkey_check ;jmpkey_press:inc a_KEY_NUM ; check if key1 press or notpa ;a,mov0fh ;a,and00001110b ;xora,sz z ;jmpkey_check ;inc a_KEY_NUM ; check if key2 press or nota,pa ;mov0fh ;a,and00001101b ;xora,sz z ;key_check ;jmpinc a_KEY_NUM ; check if key3 press or notpa ;a,mov0fh ;a,and00001011b ;a,xor9sz z ;key_check ;jmpinc a_KEY_NUM ; check if key4 press or notpa ;a,mova,0fh ;and00000111b ;xora,sz z ;key_check ;jmpkey_multi:clr a_KEY_NUM ; clear key rama_KEY_TMP ;clrmov a, low debouce_const ; initial debouce_counterdebouce_counter[0],a ;movmov a, high debouce_const ;a ;movdebouce_counter[1],jmp key_scan ; continue key scankey_check:mov a, a_KEY_TMP ; check if key change or not a,a_KEY_NUM ;xorz ;snzkey_change ;jmpmov a, debouce_counter[0] ; decrease debouce_countersub1 ;a,a ;movdebouce_counter[0],c ;snzdec debouce_counter[1] ;sz debouce_counter[0] ; check if key debouce finish or not key_scan ;jmpsz debouce_counter[1] ;key_scan ;jmpjmpkey_verify ;key_change:mov a, a_KEY_NUM ; store a_KEY_NUM to a_KEY_TMPmova ;a_KEY_TMP,mov a, low debouce_const ; initial debouce_countera ;movdebouce_counter[0],mov a, high debouce_const ;a ;debouce_counter[1],movkey_scan ;jmpkey_verify:mov a, a_PREV_KEY ; check if key repeata_KEY_NUM ;a,xor10snzz ;key_difference ;jmpfg_REPEAT ;setret ; returnkey_difference:mov a, a_KEY_NUM ; store a_KEY_NUM to a_PREV_KEYa ;mova_PREV_KEY,fg_REPEAT ;clrret ; return;@----------------------------------------------------------------------------- code_edit:MOV A, KEY_DATA_0 ; READ key dataA ;MOV key[0],KEY_DATA_1 ;MOV A,A ;MOV key[1],KEY_DATA_2 ;MOV A,A ;MOV key[2],MOV A, ID_DATA_0 ; READ address data to low 20 bit of 24 bit; ID dataA ;MOV idata[0],ID_DATA_1 ;MOV A,MOV idata[1],A ;A,ID_DATA_2 ;MOV0fh ;And a,A ;MOV idata[2],mov a, a_KEY_NUM ; READ key data to high 4 bit of 24 bit; ID dataa ;a_KEY_TMP,mova,00001000b ;movrla acc ;sdz a_KEY_TMP ;jmp $-2 ;orm a,idata[2] ;mov a, offset hdata ; read hdata from eeprommp0,a ;movhdata_ee_start_adr ;a,mova ;movdataaddr,read_loop: ;wdt ;clrcall ht48e_eeprom_read ;data2 ;a,mova ;r0,movinc mp0 ;dataaddr ;inc11movdataaddr ;a,xor a, hdata_ee_start_adr + 3 ;z ;snzjmpread_loop ;hdataincrease mov a, 1 ;hdata[0] ;addm a,mov a, 0 ;hdata[1] ;adcm a,mov a, 0 ;hdata[2] ;adcm a,call ht48e_eeprom_ewen ; write hdata to eeprommov a, offset hdata ;mp0,a;movhdata_ee_start_adr ;a,movdataaddr,a ;movwrite_loop: ;wdt ;clrr0 ;a,mova ;data2,movcall ht48e_eeprom_write ;inc mp0 ;incdataaddr ;dataaddr ;a,movxor a, hdata_ee_start_adr + 3 ;z ;snzwrite_loop ;jmpcall ht48e_eeprom_ewds ;mov a, 24 ; Encryption of codea ;rn,mov1 ;a,mova ;sstep,movWDT ;CLRcall DE24_1_Encryption ;returnret ;;@----------------------------------------------------------------------------- send_code:set tmr1c.4 ; run timer0;lead_low_9ms sectionlowoutputClr pn_RF ;mov a, 16 ; 560us * 16 = 8.96mslead_loop1: ;wdt ;clrsnz tmr0_flag ;jmp lead_loop1 ;12clr tmr0_flag ;sdz acc ;jmp lead_loop1 ;;lead_high_2.5ms sectionoutputhighSet pn_RF ;a,4 ; 560us * 4 = 2.24msmovlead_loop2: ;wdt ;clrsnz tmr0_flag ;jmp lead_loop2 ;clr tmr0_flag ;sdz acc ;jmp lead_loop2 ;sz fg_REPEAT ; check if key repeat or notjmp REPEAT_CODE ;;lead_high_2ms section4 ; 560us * 4 = 2.24msa,movlead_loop3: ;clrwdt ;snz tmr0_flag ;jmp lead_loop3 ;clr tmr0_flag ;sdz acc ;jmp lead_loop3 ;mov a, 48 ; bit of idata + bit of idata = 48a ;mov data_num,data_loop:;data_low sectionlowClr pn_RF ;output560uswaitwdt ;clrsnz tmr0_flag ;jmp $-2 ;clr tmr0_flag ;;data_high sectionset pn_RF ; output highrrc hdata[2] ; shift 48 bit code rightrrc hdata[1] ;rrc hdata[0] ;rrc idata[2] ;rrc idata[1] ;rrc idata[0] ;snz c ;13jmp $+3 ;a,3 ; 1: 3 *560us = 1.68msmovjmp $+2 ;560us0:mov a,1 ;data_high_loop:wdt ;waitclrsnz tmr0_flag ;jmp data_high_loop ;clr tmr0_flag ;sdz acc ;jmp data_high_loop ;sdz data_num ; check if send 48 bit code or notjmp data_loop ;;end sectionlowclr pn_RF ;output560uswaitclrwdt ;snz tmr0_flag ;jmp $-2 ;clr tmr0_flag ;jmp send_finish ;REPEAT_CODE:lowoutputclr pn_RF ;wait560uswdt ;clrsnz tmr0_flag ;jmp $-2 ;clr tmr0_flag ;send_finish:highoutputset pn_RF ;stoptimer0clr tmr1c.4 ;returnret ;;@-----------------------------------------------------------------------------14;==================================================================== ; file name: ht48e06_eeprom.ASM; date:; ROM use:; RAM use:;==================================================================== #define ht48e_eeprom_asm;operate codeoc_read equ 10000000boc_erase equ 11000000boc_write equ 01000000boc_ewen equ 00110000boc_ewds equ 00000000boc_eral equ 00100000boc_wral equ 00010000b;==================================================================== ;modify the definition of CS/SK/DI/DO bit according to the circuit;==================================================================== eecr equ 140h#define cs iar1.4#define sk iar1.5#define di iar1.6#define do iar1.7;==================================================================== ;can't be modify;==================================================================== ifndef ht48e_eeprom_asmextern dataaddr :byteextern data2 :byteextern ht93lc46_write :nearextern ht93lc46_read :nearextern ht93lc46_ewen :nearextern ht93lc46_ewds :nearextern ht93lc46_eral :nearextern ht93lc46_wral :nearextern ht93lc46_erase :nearendif;==================================================================== public dataaddr ; data addresspublic data2 ; byte of datapublic ht48e_eeprom_eral ;public ht48e_eeprom_wral ;public ht48e_eeprom_ewen ;public ht48e_eeprom_ewds ;public ht48e_eeprom_write ;public ht48e_eeprom_read ;public ht48e_eeprom_erase ;15;==================================================================== ht48e_eeprom_data .section 'data'?dataaddr db?data2 db?data1 dbmovb db ?reg db ?reg1 db ?;==================================================================== ht48e_eeprom_code .section 'code';==================================================================== ; READ--read data out; description read data from appointed address of eeprom; input: dataaddr:appointed address; output data2 :byte of data; stack use 1;==================================================================== ht48e_eeprom_read proc call ht48e_eeprom_start ; start bitoc_readmov a,amov data1,mov a,2 ; write 2 bit op-code call wbitdataaddrmov a,amov data1,rl data1mov a,7 ; write 7 bit dataaddr call wbitnopcall rbitclr csretht48e_eeprom_read endp;==================================================================== ; WRITE--write data in; description: write data to appointed address of eeprom; input dataaddr:appointedaddress; data2 :byte of data; output nothing; stack use 1;==================================================================== ht48e_eeprom_write proccall ht48e_eeprom_startoc_writemov a,amov data1,mov a,2 ; write 2 bit op-code call wbitdataaddrmov a,mov data1,a16rl data1mov a,7 ; write 7 bit dataaddrcall wbitnopmov a,data2amov data1,mov a,8call wbitclr cscall delaycall mverifyclr csretht48e_eeprom_write endp;====================================================================; ERASE--erase data; description: write 1 to appointed address of eepromaddress; input dataaddr:appointed; output: nothing; stack use 1;====================================================================ht48e_eeprom_erase proccall ht48e_eeprom_startoc_erasemov a,amov data1,mov a,2 ; write 2 bit op-codecall wbitdataaddrmov a,amov data1,rl data1mov a,7 ; write 7 bit dataaddrcall wbitclr cscall delaycall mverifyclr csretht48e_eeprom_erase endp;====================================================================; EWDS暙; description: disable eeprom write; stack use: 1;====================================================================ht48e_eeprom_ewds proccall ht48e_eeprom_startoc_ewdsmov a,amov data1,mov a,9 ; write 4 bit op-code and 5 bit x-code call wbit17clr skset sknopclr skclr csretht48e_eeprom_ewds endp;====================================================================; EWEN暙; description: enable eeprom write; stack use 1;====================================================================ht48e_eeprom_ewen proccall ht48e_eeprom_startoc_ewenmov a,amov data1,mov a,9 ; write 4 bit op-code and 5 bit x-code call wbitclr skset sknopclr skclr csretht48e_eeprom_ewen endp;====================================================================; ERAL--erase all; description: write 1 to all of eeprom; stack use: 1;====================================================================ht48e_eeprom_eral proccall ht48e_eeprom_startmov a,oc_eralamov data1,mov a,9 ; write 4 bit op-code and 5 bit x-code call wbitclr skset sknopclr skclr cscall delaycall mverifyclr csretht48e_eeprom_eral endp;====================================================================; WRAL--write all; description: write data to all of eeprom18; input data2 :bytedataof; output: nothing; stack use 1;====================================================================ht48e_eeprom_wral proccall ht48e_eeprom_startoc_wralmov a,amov data1,mov a,9 ; write 4 bit op-code and 5 bit x-code call wbitclr skset sknopclr skdata2mov a,amov data1,mov a,8call wbitclr cscall delaycall mverifyclr csretht48e_eeprom_wral endp;====================================================================; start signal;====================================================================ht48e_eeprom_start proceecrmov a,highamov bp,mov a, low eecramov mp1,set csclr skset dinopnopset sknopclr skretht48e_eeprom_start endp;====================================================================; write n bit data subroutine, n is decided by acc;====================================================================wbit procamov movb,loop1:clr sk19rl data1snz data1.0jmp loop1_1set dijmp loop1_2loop1_1:clr diloop1_2:nopset sknopsdz movbjmp loop1clr skretwbit endp;==================================================================== ;read 8 bit data subroutine;==================================================================== rbit proc08hmov a,amov movb,loop_r:rl data2set sknopsnz dojmp loops_0set data2.0jmp loops_1loops_0:clr data2.0loops_1:clr sksdz movbjmp loop_rretrbit endp;==================================================================== ;detect DO=HIGH?(operation complete);==================================================================== mverify procset csnopnopnopcheck:snz do20jmp checkretmverify endp;==================================================================== delay procset reg106hmov a,amov reg,lpy:sdz reg1jmp lpysdz regjmp lpyretdelay endp;====================================================================21;===============================================================================; DE24_1_Encryption SWIP Program; file name: DE24_1_Encryption.ASM;===============================================================================DE24_1_Encryption .section 'code'DE24_1_Encryption:clearwdtClr wdt1 ;wdt2 ;clrmov a,sstep ; store shift step number to shift_step shift_step,a ;movmov a, hdata[0] ; store hdata to(de24_1_tmp[3]~de24_1_tmp[5]);mov de24_1_tmp[3],a ; store (hdata + key) to;(de24_1_tmp[0]~de24_1_tmp[2]) add a, key[0] ;mov de24_1_tmp[0],a ;hdata[1] ;a,movde24_1_tmp[4],a ;movkey[1] ;adc a,mov de24_1_tmp[1],a ;hdata[2] ;mova,de24_1_tmp[5],a ;movkey[2] ;adc a,mov de24_1_tmp[2],a ;left_rotation_loop1:wdtclr wdt1 ;clearwdt2 ;clrclr c ; (de24_1_tmp[3]~de24_1_tmp[5]) << sstepsz hdata[2].7 ;set c ;rlc de24_1_tmp[3] ;rlc de24_1_tmp[4] ;rlc de24_1_tmp[5] ;sdz shift_step ;jmp left_rotation_loop1 ;(de24_1_tmp[3]~de24_1_tmp[5]+key)^storekey[0] ;mov a,(de24_1_tmp[0]~de24_1_tmp[2])to;(de24_1_tmp[0]~de24_1_tmp[2]);de24_1_tmp[3] ;add a,de24_1_tmp[0] ;xorm a,mov a,key[1] ;de24_1_tmp[4] ;adc a,de24_1_tmp[1] ;xorm a,mov a,key[2] ;22de24_1_tmp[5] ;adc a,de24_1_tmp[2] ;xorm a,mov a, de24_1_tmp[0] ; store (idata +to;(de24_1_tmp[0]~de24_1_tmp[2])) idataaddm a,idata[0] ;de24_1_tmp[1] ;a,movidata[1] ;adcm a,a,de24_1_tmp[2] ;movidata[2] ;adcm a,;------------------------------------------------------------------------------- mov a, sstep ; store shift step number to shift_step shift_step,a ;movmov a, idata[0] ; store idata to(de24_1_tmp[3]~de24_1_tmp[5]);mov de24_1_tmp[3],a ; store (idata + key) to(de24_1_tmp[0]~de24_1_tmp[2]);key[0] ;add a,mov de24_1_tmp[0],a ;idata[1] ;mova,de24_1_tmp[4],a ;movkey[1] ;adc a,mov de24_1_tmp[1],a ;idata[2] ;mova,de24_1_tmp[5],a ;movkey[2] ;adc a,mov de24_1_tmp[2],a ;left_rotation_loop2:wdtclearclr wdt1 ;wdt2 ;clrclr c ; (de24_1_tmp[3]~de24_1_tmp[5]) << sstepsz idata[2].7 ;set c ;rlc de24_1_tmp[3] ;rlc de24_1_tmp[4] ;rlc de24_1_tmp[5] ;sdz shift_step ;jmp left_rotation_loop2 ;store(de24_1_tmp[3]~de24_1_tmp[5]+key)^ key[0] ;mov a,to;(de24_1_tmp[0]~de24_1_tmp[2])(de24_1_tmp[0]~de24_1_tmp[2]);add a, de24_1_tmp[3] ;de24_1_tmp[0] ;xorm a,mov a, key[1] ;23adc a,de24_1_tmp[4] ;de24_1_tmp[1] ;xorm a,mov a, key[2] ;adc a, de24_1_tmp[5] ;de24_1_tmp[2] ;xorm a,mov a, de24_1_tmp[0] ; store (hdata +to(de24_1_tmp[0]~de24_1_tmp[2]));hdataaddm a,hdata[0] ;de24_1_tmp[1] ;mova,hdata[1] ;adcm a,movde24_1_tmp[2] ;a,hdata[2] ;adcm a,;------------------------------------------------------------------------------- Sdz rn ;decrease rn, check if round number is zeroJmp DE24_1_Encryption ; continue roundreturnret ;;===============================================================================;===============================================================================; DE24_1_Encryption Register Define Program; file name: DE24_1_MEMORY.ASM;===============================================================================;;==============================================================================DE24_1_data .section 'data'rn db ? ; round numberstepshiftsstep db ? ;idata db 3 dup(?) ; id_data,24-bithdata db 3 dup(?) ; hop_data,24-bitkey db 3 dup(?) ; 24-bit key;------------------------------------------------------------------------------- shift_step db ?de24_1_tmp db 6 dup(?);;==============================================================================24。
编码器的资料参数有哪些选型应注意三方面的参数:1、械安装尺寸:包含定位止口,轴径,安装孔位;电缆出线方式;安装空间体积;工作环境防护等级是否充足要求。
2、判别率:即P+F编码器工作时每圈输出的脉冲数,是否充足设计使用精度要求。
3、电气接口:P+F编码器输出方式常见有推拉输出(F型HTL格式),电压输出(E),集电极开路(C,常见C为NPN型管输出,C2为PNP型管输出),长线驱动器输出。
其输出方式应和其掌控系统的接口电路相匹配。
常见故障1、P+F编码器自身故障:是指P+F编码器自身元器件显现故障,导致其不能产生和输出正确的波形。
这种情况下需更换P+F编码器或维护和修理其内部器件。
2、P+F编码器连接电缆故障:这种故障显现的几率zui高,维护和修理中常常碰到,应是优先考虑的因素。
通常为P+F编码器电缆断路、短路或接触不良,这时需更换电缆或接头。
还应特别注意是否是由于电缆固定不紧,造成松动引起开焊或断路,这时需卡紧电缆。
3、P+F编码器+5V电源下降:是指+5V电源过低,通常不能低于4.75V,造成过低的原因是供电电源故障或电源传送电缆阻值偏大而引起损耗,这时需检修电源或更换电缆。
4、式P+F编码器电池电压下降:这种故障通常有含义明确的报警,这时需更换电池,假如参考点位置记忆丢失,还须执行重回参考点操作。
5、P+F编码器电缆屏蔽线未接或脱落:这会引入干扰信号,使波形不稳定,影响通信的精准性,必须保证屏蔽线牢靠的焊接及接地。
6、P+F编码器安装松动:这种故障会影响位置掌控精度,造成停止和移动中位置偏差量超差,甚至刚一开机即产生伺服系统过载报警,请特别注意。
7、光栅污染这会使信号输出幅度下降,必须用脱脂棉沾无水酒精轻轻擦除油污。
安装使用型旋转P+F编码器的机械安装使用:型旋转P+F编码器的机械安装有高速端安装、低速端安装、辅佑襄助机械装置安装等多种形式。
高速端安装:安装于动力马达转轴端(或齿轮连接),此方法优点是判别率高,由于多圈P+F编码器有4096圈,马达转动圈数在此量程范围内,可充足用足量程而提高判别率,缺点是运动物体通过减速齿轮后,来回程有齿轮间隙误差,一般用于单向高精度掌控定位,例如轧钢的辊缝掌控。
电机编码器参数电机编码器是用于测量电机转动位置和速度的装置。
编码器参数的选择取决于应用的具体要求和性能标准。
以下是一些常见的电机编码器参数和相关术语:1. 分辨率(Resolution):•分辨率表示编码器输出值与实际位置之间的关系,通常以每转的脉冲数(PPR)或线数表示。
较高的分辨率通常提供更准确的位置信息。
2. 脉冲数(Pulses Per Revolution,PPR):• PPR 是编码器每旋转一周输出的脉冲数。
它与分辨率有关,但通常用于描述旋转编码器的性能。
3. 电压(Voltage):•编码器通常有特定的电源电压要求。
确保电机和编码器的电源匹配,以确保正常运行。
4. 电流(Current):•电机编码器可能需要额外的电流供应。
在选择时,请考虑系统中的电流要求。
5. 接口类型(Interface Type):•编码器的输出可以通过不同的接口传递,例如模拟输出、数字脉冲、SSI(Synchronous Serial Interface)等。
选择与你的控制系统兼容的接口。
6. 工作温度范围(Operating Temperature Range):•编码器应该能够在系统操作的温度范围内正常工作。
7. 防护等级(Ingress Protection,IP Rating):• IP 等级表示编码器对灰尘、水分和其他环境因素的防护能力。
例如,IP65 表示编码器对尘土和喷水具有一定的防护能力。
8. 反馈类型(Feedback Type):•编码器的反馈类型通常有增量型和绝对型。
增量型提供相对运动信息,而绝对型提供绝对位置信息。
9. 最大转速(Maximum Speed):•编码器能够测量的最大转速。
超过此速度可能导致测量误差。
10. 重量(Weight):•编码器的重量可能在某些应用中是一个重要的考虑因素,特别是在需要考虑负载的情况下。
请注意,选择合适的电机编码器参数需要综合考虑你的具体应用需求、系统要求和性能标准。
新代编码器规格说明书匯出日期:2023-05-10修改日期:2022-04-20••••••••••••型号定义(Definition of Encoder Model Number)规格(Specification)编码器线材与Pin 脚定义(Encoder Cable & Pin Define)编码器线材 (Encoder Cable)Pin 脚定义(Pin Define)磁环安装(Encoder Installation)磁环内径与衬套配合尺寸(Table of encoder and recommend motor shaft diameter/ bushing outer diameter)干涉量建议表(Table of encoder and recommend interference range)外型尺寸(External Dimensions)磁环安装(Encoder Installation)磁环内径与衬套配合尺寸(Table of encoder and recommend motor shaft diameter/ bushing outer diameter)干涉量建议表(Table of encoder and recommend interference range)版本號編修日期編修內容Excel 檔作者審查核准V1.02018/09/06新增新代編碼器規格與外型尺寸、安裝須知業務選型-新代編碼器_v1.0.xlsx 劉思伶V1.12021/3/3新增下線產品區,將一代162/242移入下線產品區业务选型-新代编码器_v1.1.xlsx江國維V1.22022/4/20更換326級圖面江國維文件目录文件履历文件目录文件履历1.1 型号定义(Definition of Encoder Model Number)2.2 规格(Specification)3.a.b.3 编码器线材与Pin 脚定义(Encoder Cable & Pin Define)3.1 编码器线材 (Encoder Cable)3.2 Pin 脚定义(Pin Define)4.a.b.4 磁环安装(Encoder Installation)4.1 磁环内径与衬套配合尺寸(Table of encoder andrecommend motor shaft diameter/ bushing outer diameter)4.2 干涉量建议表(Table of encoder and recommendinterference range)5.5 外型尺寸(External Dimensions)编码器型号Encod er Model Numb er 外型尺寸External DimensionsS08-GSKM□-□□□-□mmGSKM(T)-64-□□GSKM-64GSKMT-64GSKMT-64-23GSKMT-64-30GSKM(T)-82GSKM-82GSKMT-82X XX XGSKM( T)-102GSKM-102GSKMT-102XX1.X XGSKM-124GSKM-124X X X XXXGSKM-326-□GSKM-326-S X X X XXX已下線專區规格(Specification)2.a.b.3.6 磁环安装(Encoder Installation)6.1 磁环内径与衬套配合尺寸(Table of encoder andrecommend motor shaft diameter/ bushing outer diameter)6.2 干涉量建议表(Table of encoder and recommendinterference range)编码器型号Encod er Model Numb er 外型尺寸External DimensionsS08-GSKM □-□□□-□mmGSKM -162-□GSKM-162GSKM-162-S X X XXGSKM -242 -□GSKM-242GSKM-242-S X XXX伺服產品/Servo Products–新代编码器规格说明书新代編碼器規格說明書-文件履歷 – 117 新代編碼器規格說明書-文件履歷版本號編修日期編修內容Excel 檔作者審查核准V1.02018/09/06新增新代編碼器規格與外型尺寸、安裝須知業務選型-新代編碼器_v1.0.xlsx 劉思伶 V1.12021/3/3新增下線產品區,將一代162/242移入下線產品區业务选型-新代编码器_v1.1.xlsx 江國維 V1.22022/4/20更換326級圖面江國維。
编码器技术参数说明1、增加式输出波形与信号位置精度90°相位差两信号与零位信号从轴端看,顺时针旋转(CW)时的波形图波形比:X1+X2=180°±15°X3+X4=180°±15°相位差:Xn=90°±15°(n=1,2,3,4)信号位置精度:准确度≤10°周期误差±0.01T零位信号:Tz=360°±15°电角度周期:TD =360°冲脉周期:T=360°/N(N为每转输出脉冲数)A、B相与Z相的位置关系不作规定。
2、电气参数形式记号输出方式电源电压(V)消耗电流(mA)输出电压(V)注入电流(mA)最小负载阻(Ω)上升下降时间(us)响应频率(KHz)VH VL05C集电极开路5±0.25≤100--≤30-≤10~200 05E电压5±0.25≤100≥3.5≤0.5--≤10~200 05F推挽互补5±0.25≤100≥3.5≤0.5--≤10~200 05L驱动器26LS315±0.25≤100≥2.5≤0.5--≤0.20~200 05D驱动器MC34875±0.25≤100≥2.5≤0.5--≤0.20~200 05P驱动器751835±0.25≤100≥2.5≤0.5--≤0.20~200 12C集电极开路12±1.2≤100--≤30-≤10~200 12E电压12±1.2≤100≥8.0≤0.5--≤10~200 12F推挽互补12±1.2≤100≥8.0≤0.5-≥500≤10~200 15C集电极开路15±1.5≤100--≤30-≤10~200 15E电压15±1.5≤100≥10.0≤0.5--≤10~200 15F推挽互补15±1.5≤100≥10.0≤0.5-≥500≤10~200 24C集电极开路24±2≤150--≤30-≤20~200 24E电压24±2≤150≥3.5≤0.5--≤20~200 24F推挽互补24±2≤150≥20.0≤0.5-≥500≤20~200 24M驱动器MM88C3024±2≤150≥18.0≤0.5--≤0.20~200。
编码器参数_编码器型号说明导语:编码器一种很常见的人机交互信息输入元器件,主要分为两大类一类是光电编码器一类是接触式的编码器,今天主要跟大家分享一下接触式旋转编码器型号以及命名规则。
编码器参数编码器主要参数如下:1、械安装尺寸:包括定位止口,轴径,安装孔位;电缆出线方式;安装空间体积;工作环境防护等级是否满足要求。
2、分辨率:即编码器工作时每圈输出的脉冲数,是否满足设计使用精度要求。
3、电气接口:编码器输出方式常见有推拉输出(F型HTL格式),电压输出(E),集电极开路(C,常见C为NPN型管输出,C2为PNP型管输出),长线驱动器输出。
其输出方式应和其控制系统的接口电路相匹配。
4、电源输入信号和输出信号,电流、电压等等。
编码器型号说明编码器一种很常见的人机交互信息输入元器件,主要分为两大类一类是光电编码器一类是接触式的编码器,今天主要跟大家分享一下接触式旋转编码器型号以及命名规则。
这类编码器生产厂家很多在编码器型号跟命名上并没有行业的统-标准,都是由厂家自行编立统一的型号,接下来就以下图旋转编码器型号为例,给大家做一个型号命名规格的讲解同样适用于旋转编码器命名规则。
如下图:RE1103IC1-H01-0006(15P30,AA9F4)这是一个典型的完整的编码器型号。
A:RE是编码器大的代号,厂家的命名规则不同前面代号也有所不同林积为取RE则是旋转编码器rotaryencoder英文首字母。
B:外观关键尺寸大小11则为某一个面的尺寸11mm 左右。
C:03是薄型底座带开关产品,还有如00厚型底座不带开关、01厚型底座带开关产品等等。
D:轴套的形状代号,则为35mm长度无螺纹轴套,还有7mm、5mm、10mm有无螺纹等等这些信息。
E:支架代号,C支架代表安装方式为插件方式,支架脚的宽度为2.0mm支架脚总跨度为13.2mm,还有宽2.5mm跨度12.9跟贴片支架脚等等。
F:代表底盖有无定位柱,1代表无柱子。
光电编码器型号参数的含义一、前言光电编码器是一种广泛应用于工业自动化领域的传感器,主要用于测量和控制旋转角度、线性位移等物理量。
在选择和使用光电编码器时,我们需要了解其型号参数的含义,以便正确地进行选型和应用。
二、型号参数光电编码器的型号通常由多个参数组成,包括分辨率、脉冲数、供电电压、输出信号类型等。
下面将逐一介绍这些参数的含义。
1. 分辨率分辨率是指光电编码器能够测量的最小角度或位移变化量。
通常以每圈或每毫米的脉冲数来表示。
例如,一个分辨率为1000脉冲/圈的光电编码器表示它能够将360度角度变化分成1000份进行测量。
2. 脉冲数脉冲数是指每个输出周期内产生的脉冲数量。
通常以每圈或每毫米的脉冲数来表示。
例如,一个脉冲数为2000/圈的光电编码器表示它在每个输出周期内会产生2000个脉冲信号。
3. 供电电压供电电压是指光电编码器的工作电压范围。
通常以直流电压表示,例如5V、12V、24V等。
在选择光电编码器时,需要根据实际应用中的供电条件来确定合适的供电电压。
4. 输出信号类型输出信号类型是指光电编码器产生的脉冲信号类型,常见的有两种:开关量和模拟量。
开关量输出通常是指具有高低电平两种状态的数字信号,常用于控制系统中的开关量输入或输出。
例如,一个光电编码器可以通过脉冲信号来控制机器人臂的运动。
模拟量输出通常是指具有连续变化范围的模拟信号,常用于测量系统中需要连续变化输出信号的场合。
例如,一个光电编码器可以通过模拟信号来测量机械臂末端位置和速度。
5. 接口类型接口类型是指光电编码器与外部设备连接时所使用的接口标准。
目前市面上常见的接口标准有RS-485、CAN、Ethernet等。
选择合适的接口类型可以方便地将光电编码器与其他设备进行连接和数据传输。
三、结论以上就是光电编码器型号参数含义的详细介绍。
在实际应用中,我们需要根据具体的应用场景来选择合适的光电编码器型号,以确保测量精度和控制效果。
同时,还需要注意光电编码器的安装和调试,以确保其正常工作。
编码器型号说明编码器型号大全编码器型号选型编码器型号说明编码器型号大全编码器型号选型编码器型号说明范例:EC 11 B H S - D3 - 24 C OO PC -15 KQ B1 2 3 4 5 6 7 8 9 10 11 1.系列:EC 编码器2.直经:11mm , 12mm , 16mm3.转轴材料:E: 膠柄B: 铝柄4.端子型式:□ 标准 Standard H: 曲端子5.开关型式:带按键开关6. 轴套型式:XD( 侧铆型 )B( 平铆型 )特征14.04.0带螺纹25.05.0带螺纹37.07.0带螺纹45.05.0不带螺纹57.07.0不带螺纹7.编码定位点:12,20,248.无定位感:00: 表示没有定位手感H: 表示重手感L: 表示轻手感9.轴长:15mm , 20mm , 25mm , 30mm10.轴型:KQ:18 齿花轴承 F: 半月轴11.油脂代号:A ~ Z( 表示手感轻重 )编码器型号选型首先选择旋转编码器的类型:1. 确定检测对象,测速、测距、测角位移还是计数等。
2.仅用于动态过程还是包含静态位置或状态。
3.确定对象的运动范围。
4.确定对象的最高速度或频率。
5.确定对象的精度要求。
6. 使用环境。
根据1,2,选择增量型旋转编码器还是绝对型旋转编码器。
根据3,选择单圈绝对型旋转编码器还是多圈绝对型旋转编码器。
根据4,5,选择旋转编码器应用参数。
根据6,选择旋转编码器的接口方式和保护等级。
其他因素略。
而后选择旋转编码器的型号:一.服务。
备件方便,有技术支持团队。
当出现问题时,有技术后盾。
二.品牌。
口碑好的厂商,有相应的替代产品,不至于被一家供应商约束。
三.成本。
能接受即可。
四.交流。
同行或近邻有使用的先例。
少走弯路。
五.要求。
满足应用即可。
如,精度过高反而会影响处理速度;保护等级过高会提高成本等。
仅供参考。
编码器型号大全PEPPERL+FUCHS编码器型号大全AVS58N-011AAROGN-0012 AVM58N-011AAROBN-1212 RVI50N-09BK0A3TN-01000 RVI50N-09BKOA3TN-0600 AVS58I-011AAROBN-0012 AVM58I-011AAROBN-1212 AVM58N-011K1R0GN-1213 AVM58N-032K1R0GN-1212 AVM58N-011K1R0GN-1212 RVI58N-011AAA66N-01024 RVI78N-10CK2A31N-3000 RVI58N-011K1R61N-01024 AVM58N-011AAKHGN-1212 FVM58N-011K2R3GN-1213 RVI58N-032K1R61N-5000 RVI58N-011AAR6XN-5000 RVI58N-032AAR66N-01024 RHI58N-OBAK1R61N-1024HI58N-OBAK1R6XN-1024 RVI58N-032K1R31N-00600 RVI58N-032K1R31N-00500 RHI90N-OHAAAR61N-1024 PVS58N-011AGROBN-0013 AVM58N-011K1RHCN-1212 RHI58N-0BAR1R61N-1000 RVI50N-09BK0A3TN-01000 RVI58N-011K1R61N-5000 RVI50N-09BK0A3TN-1000PVM58N-011AGROBN-1213 RVI78N-10CK2A31N-0100 FHS58N-0BAK2RR4GN-0013 RVI58N-011AAR6XN-01024 DVM58N-011AGROBN-1213 RVI50N-09BK0A3TN-00500 RVI50N-09BK0A3TN-0500 AVS58N-011AAROGN-0012 AVM58N-011AAROBN-1212 RVI50N-09BK0A3TN-01000 RVI50N-09BKOA3TN-0600 AVS58I-011AAROBN-0012 AVM58I-011AAROBN-1212 AVM58N-011K1R0GN-1213 AVM58N-032K1R0GN-1212 AVM58N-011K1R0GN-1212 RVI58N-011AAA66N-01024 RVI78N-10CK2A31N-3000 RVI58N-011K1R61N-01024 AVM58N-011AAKHGN-1212 FVM58N-011K2R3GN-1213 RVI58N-032K1R61N-5000 RVI58N-011AAR6XN-5000 RVI58N-032AAR66N-01024 RHI58N-OBAK1R61N-1024 HI58N-OBAK1R6XN-1024 RVI58N-032K1R31N-00600 RVI58N-032K1R31N-00500 RHI90N-OHAAAR61N-1024AVM58N-011K1RHCN-1212 RHI58N-0BAR1R61N-1000 RVI50N-09BK0A3TN-01000 RVI58N-011K1R61N-5000 RVI50N-09BK0A3TN-1000 PVM58N-011AGROBN-1213 PVM58N-011AGROBN-1213 RVI78N-10CK2A31N-0100 FHS58N-0BAK2RR4GN-0013 RVI58N-011AAR6XN-01024 DVM58N-011AGROBN-1213 RVI50N-09BK0A3TN-0500 RVI50N-09BK0A3TN-00500 RVI50N-09BKOA3TN-500 RVI50N-09BK0A3TN-600 RVI50N-09BKOA3TN-1000 RVI50N-09BKOA3TN-1024 RVI50N-09BKOA3TN-2000 RVI50N-09BKOA3TN-2048 RVI58N-011K1R61N-360 RVI58N-011K1R61N-1000 RVI58N-011K1R61N-1024 RVI58N-011K1R61N-2048 RVI78N-10CK2A31N-600 RVI78N-10CK2A31N-1000 RVI78N-10CK2A31N-1024 RVI78N-10CK2A31N-5000 AVM58N-011AGROBN-1213 AVM58N-011AGROGN-1213PVM58N-011AGROBN-1213 PVS58N-011AGROBN-0012 PVS58N-011AGROGN-0013 FVM58N-011K2R3GN-0013 ASM58N-F1AK1R0BN-1213 ASM58N-F1AK1R0GN-1212 ASM58N-F2AAARHGN-1213 ASM58N-F2AK1R0GN-1213 ASM58N-F2AK1RHGN-1212 ASM58N-F2AK1RHGN-1213 ASM58N-F3AAAR0GN-1213 ASS58N-F1AK1RHGN-0012 ASS58N-F2AK1R0GN-0012 AVM14N-05MK2A0GN-1212 AVM58I-011AAAHGN-1213 AVM58I-011AAR0BN-1212 AVM58I-011AAR0GN-1212 AVM58I-011K1AHBN-1212 AVM58I-032K1AHGN-1213 AVM58N-011AAR0BN-1212 AVM58N-011AAR0GN-1212 AVM58N-011AARHGN-1213 AVM58N-011K1AHBN-1212 AVM58N-011K1R0BN-1213 AVM58N-011K1R0GN-1213 AVM58N-011K1RHGN-1212 AVM58N-011K1RHGN-1213 AVM58N-032K1R0BN-1212 AVM58N-032K1RPGN-1212AVS58I-032AAA0GN-0016 AVS58N-011AAR0BN-0012 AVS58N-011AAR0GN-0012 AVS58N-011AARHGN-0012 AVS58N-011K1AHGN-0016 AVS58N-011K1R0BN-0016 AVS58N-011K1R0GN-0012 AVS58N-011K1R0GN-0013 AVS58N-011K1RHBN-0013 AVS58N-011K1RHGN-0016 DVM58N-011AGR0BN-1212 DVM58N-011AGR0BN-1213 DVM58N-032AGR0BN-1213 DVS58N-011AGR0BN-0013 FVM58N-011AEA3BN-0813 FVM58N-011AEA3GN-0813 FVM58N-011K2A3GN-1213 FVM58N-011K2R3BN-0813 FVM58N-011K2R3BN-1213 FVM58N-011K2R3GN-1213 FVM58N-01LAEAABN-0812 FVM58N-02LAEAAGN-0808 FVS58N-011ADR3GN-0013 FVS58N-011K2R3BN-0013 FVS58N-011K2R3GN-0013 FVS58N-021ACR1EN-00SD FVS58N-032K2R3GN-0013 PSM58I-F2AAGR0BN-1213 PSM58N-F2AAGR0BN-1213PSS58N-F2AAGR0BN-0013 PSS58N-F3AAGR0BN-0013 PVM58I-011AGR0BN-1213 PVM58I-032AGR0BN-1213 PVM58N-011AGR0BN-1213 PVM58N-011AZR0BN-1213 PVM58N-032AGR0BN-1213 PVS58I-011AGR0BN-0013 PVS58N-011AGR0BN-0013 PVS58N-023AGR0BN-0013 RHI58N-0AAK1R61N-00100 RHI58N-0AAK1R61N-01024 RHI58N-0BAK1R31N-01024 RHI58N-0BAK1R61N-00100 RHI58N-0BAK1R61N-00300 RHI58N-0BAK1R61N-00360 RHI58N-0BAK1R61N-00500 RHI58N-0BAK1R61N-01000 RHI58N-0BAK1R61N-01024 RHI58N-0BAK1R61N-02048 RHI58N-0BAK1R61N-03600 RHI58N-0BAK1R61N-05000 RHI58N-0BAK1R66N-00100 RHI58N-0BAK1R66N-01024 RHI58N-0BAK1R66N-02500 RHI58N-0BAK1R6XN-01024 RHI90N-0EAAAR61N-01024 RHI90N-0EAAAR61N-02048 RHI90N-0HAAAR61N-01024 RHI90N-0HAAAR61N-02048RHI90N-0HAK1R61N-01024 RHI90N-0HAK1R61N-02048 RHI90N-0HAK1R66N-01024 RHI90N-0IAK1R61N-01024 RHI90N-0IAK1R66N-01024 RHI90N-0LAAAR61N-01024 RHI90N-0LAK1R61N-01000 RHI90N-0LAK1R61N-01024 RHI90N-0LAK1R66N-01024 RHI90N-0NAAAR61N-01024 RHI90N-0NAK1R61N-01024 RHI90N-0NAK1R66N-01024 RSI58N-02AK1R61N-01024 RVI50N-09BAAA3TN-01000 RVI50N-09BK0A3TN-00050 RVI50N-09BK0A3TN-00060 RVI50N-09BK0A3TN-00200 RVI50N-09BK0A3TN-00360 RVI50N-09BK0A3TN-00500 RVI50N-09BK0A3TN-00600 RVI50N-09BK0A3TN-01000 RVI50N-09BK0A3TN-01024 RVI50N-09BK0A3TN-01500 RVI50N-09BK0A3TN-02000 RVI50N-09BK6A3TN-00500 RVI50N-09BK6A3TN-01000 RVI50P-09BK0A3TN-01000 RVI50P-09BK0A3TN-02000 RVI58N-011AAA61N-00500RVI58N-011AAR31N-02500 RVI58N-011AAR61N-00500 RVI58N-011AAR61N-01024 RVI58N-011AAR61N-01250 RVI58N-011AAR61N-02048 RVI58N-011AAR66N-010 RVI58N-011AAR6XN-01000 RVI58N-011AAR6XN-01024 RVI58N-011ABR6XN-01000 RVI58N-011K1A61N-00100 RVI58N-011K1A61N-00500 RVI58N-011K1A61N-01000 RVI58N-011K1A61N-01024 RVI58N-011K1A61N-01250 RVI58N-011K1A61N-01500 RVI58N-011K1A61N-02048 RVI58N-011K1A61N-02500 RVI58N-011K1A61N-05000 RVI58N-011K1A66N-02500 RVI58N-011K1R61N-00100 RVI58N-011K1R61N-00360 RVI58N-011K1R61N-00500 RVI58N-011K1R61N-01000 RVI58N-011K1R61N-01024 RVI58N-011K1R61N-01500 RVI58N-011K1R61N-05000 RVI58N-011K1R66N-01024 RVI58N-011K1R66N-02048 RVI58N-011K1R6XN-00500RVI58N-012K1R61N-00500 RVI58N-032AAA6XN-03600 RVI58N-032AAR31N-02048 RVI58N-032AAR61N-02500 RVI58N-032AAR66N-02500 RVI58N-032AAR6XN-01000 RVI58N-032ABR61N-01024 RVI58N-032ABR6XN-10000 RVI58N-032K1A61N-00100 RVI58N-032K1R31N-00050 RVI58N-032K1R31N-00600 RVI58N-032K1R61N-01024 RVI58N-032K1R66N-01024 RVI58N-032K3R66N-01024 RVI78N-10CALA31N-01000 RVI78N-10CALA31N-01024 RVI78N-10CALA31N-05000 RVI78N-10CK2A31N-00100 RVI78N-10CK2A31N-00250 RVI78N-10CK2A31N-00600 RVI78N-10CK2A31N-01000 RVI78N-10CK2A31N-01024 RVI78N-10CK2A31N-02000 RVI78N-10CK2A31N-02500 RVI78N-10CK2A31N-03600 RVI84N-10CK2A2NN-00025 RZI58N-S12K1R31N-00050 THI40N-0SAK2R6TN-00500 THI58N-0BAK0R6TN-01000TVI40N-14TK0T6TN-00360 TVI50N-09BK0A6TN-01024 TVI50N-09BK0R6TN-01000 TVI50N-09BK0R6TN-01024 TVI50T-09BK0R6TN-00100 RVI50N-09BKOA3TN-500 RVI50N-09BK0A3TN-600 RVI50N-09BKOA3TN-1000 RVI50N-09BKOA3TN-1024 RVI50N-09BKOA3TN-2000 RVI50N-09BKOA3TN-2048 RVI58N-011K1R61N-360 RVI58N-011K1R61N-1000 RVI58N-011K1R61N-1024 RVI58N-011K1R61N-2048 RVI78N-10CK2A31N-600 RVI78N-10CK2A31N-1000 RVI78N-10CK2A31N-1024 RVI78N-10CK2A31N-5000 AVM58N-011AGROBN-1213 AVM58N-011AGROGN-1213 AVM58N-011AGROGN-1212 PVM58N-011AGROBN-1213 PVS58N-011AGROBN-0012 PVS58N-011AGROGN-0013 RVI50N-09BKOA3TN-500 RVI50N-09BK0A3TN-600 RVI50N-09BKOA3TN-1000 RVI50N-09BKOA3TN-1024RVI50N-09BKOA3TN-2048 RVI58N-011K1R61N-360 RVI58N-011K1R61N-1000 RVI58N-011K1R61N-1024 RVI58N-011K1R61N-2048 RVI78N-10CK2A31N-600 RVI78N-10CK2A31N-1000 RVI78N-10CK2A31N-1024 RVI78N-10CK2A31N-5000 AVM58N-011AGROBN-1213 AVM58N-011AGROGN-1213 AVM58N-011AGROGN-1212 PVM58N-011AGROBN-1213 PVS58N-011AGROBN-0012 PVS58N-011AGROGN-0013 FVM58N-011K2R3GN-0013 RVI50N-09BKOA3TN-500 RVI50N-09BK0A3TN-600 RVI50N-09BKOA3TN-1000 RVI50N-09BKOA3TN-1024 RVI50N-09BKOA3TN-2000 RVI50N-09BKOA3TN-2048 RVI58N-011K1R61N-360 RVI58N-011K1R61N-1000 RVI58N-011K1R61N-1024 RVI58N-011K1R61N-2048 RVI78N-10CK2A31N-600 RVI78N-10CK2A31N-1000 RVI78N-10CK2A31N-1024AVM58N-011AGROBN-1213 AVM58N-011AGROGN-1213 AVM58N-011AGROGN-1212 PVM58N-011AGROBN-1213 PVS58N-011AGROBN-0012 PVS58N-011AGROGN-0013 FVM58N-011K2R3GN-0013 RVI78N-10CK2A31N-01000 RVI50N-09BKOA3TN-500 RVI50N-09BK0A3TN-600 RVI50N-09BKOA3TN-1000 RVI50N-09BKOA3TN-1024 RVI50N-09BKOA3TN-2000 RVI50N-09BKOA3TN-2048 RVI58N-011K1R61N-360 RVI58N-011K1R61N-1000 RVI58N-011K1R61N-1024 RVI58N-011K1R61N-2048 RVI78N-10CK2A31N-600 RVI78N-10CK2A31N-1000 RVI78N-10CK2A31N-1024 RVI78N-10CK2A31N-5000 AVM58N-011AGROBN-1213 AVM58N-011AGROGN-1213 AVM58N-011AGROGN-1212 PVM58N-011AGROBN-1213 PVS58N-011AGROBN-0012 PVS58N-011AGROGN-0013 FVM58N-011K2R3GN-0013RVI50N-09BK0A3TN-600 RVI50N-09BKOA3TN-1000 RVI50N-09BKOA3TN-1024 RVI50N-09BKOA3TN-2000 RVI50N-09BKOA3TN-2048 RVI58N-011K1R61N-360 RVI58N-011K1R61N-1000 RVI58N-011K1R61N-1024 RVI58N-011K1R61N-2048 RVI78N-10CK2A31N-600 RVI78N-10CK2A31N-1000 RVI78N-10CK2A31N-5000 AVM58N-011AGROBN-1213 AVM58N-011AGROGN-1213 AVM58N-011AGROGN-1212 PVM58N-011AGROBN-1213 PVS58N-011AGROBN-0012 PVS58N-011AGROGN-0013 FVM58N-011K2R3GN-0013 AVM58N-011ABR0GN-1213 FVM58N-011K2R3GN-0013 德国倍加福(安全栅 )KFD2-STC4-Ex1KFD2-CD-EX1.32KFD2-SR2.Ex1.WKFD2-UFC-EX1.DKFD2-SR2-Ex2.WKFD2-GU-Ex1KFD2-STC4-Ex1.2OKFD2-CRG-Ex1.DKFD2-UT2-Ex1KFD2-STC4-Ex2KFD2-STC3-Ex1KFD2-EB2.R4A.B Z 960 a.c. Z 787.H UPR-03 KFD2-SL2-EX1.BKFD2-SL2-EX1KFD2-SL2-Ex2KFD2-SCS-EX1.55KFD2-VR2-EX1.50mKFD2-VR4-EX1.26KFD2-RR-Ex1KFD2-PT2-Ex1-5KFD2-SCD-Ex1.LKKFD2-UT2-1KFD2-UT2-1 Z 728 + Z 954 a.c.KCD2-SR-EX1.LBKFD2-SR2.EX1.WKFD2-SOT2-EX1.NKFD2-DU-EX1.DKFD2-SL2-EX1KFD2-SL2-EX1.LKKFD2-SL2-EX2KFD2-SL2-EX2.BKCD2-STC-EX1KFD2-STC3-EX1KFD2-STC4-EX2KFDO-CC-EX1KFD2-UT2-EX1KFDO-RSH-1KFD2-SL-4KFD2-CR-1.3000KFD2-CR4-1KFD2-CR4-2KFD2-DWB-1.DKFA6-SR2-EX1.WKFA5-SR2-EX1.WKHA6-SH-EX1KFD2-SR2-2.2SKFA6-SR-2.3LKFA6-DWB-1.DK-LB-1.30K-LB-1.30GK-LB-2.30 FS-LB-I FP-LB-I P-LB-1.A.13 UPR-03 UPR-05 KFD2-EB2KFD2-EB2.R4A.B。
编码器(encoder)选型参数简介
传感器
—将要测量的物理量转换成可读取、处理的另一个物理量,现代控制中最常用的就是电信号。
如果把计算机、可编程控制器比喻为自动化控制的“大脑”,那么传感器就是自动化控制的“眼睛”,是机电一体化的信息反馈装置.由计算机、执行机构、执行机构内部反馈构成的控制系统,称为开环控制;由计算机、执行机构、执行机构内部反馈、执行效果外部传感器信息反馈构成的控制系统,称为闭环控制。
传感器的电信号有模拟量型和数字量型,模拟量就是电流或电压的大小变化模拟被测量物理量的大小,如果传感器输出的模拟量电信号已经是标准的信号,例如4—20mA、0—20mA、1—5V、0—10V等,这样的传感器有时也称为变送器。
传感器的电信号有时也用电压、电流高于某个域置或低于某个域置来代表1或0的数字信息,或用光信号的通、暗来传递信息,这样的传感器就是数字量输出型。
编码器
—角位移,线位移及转速传感器.
编码器是以数字化信息将角度、长度的信息以编码的方式输出的传感器,其具有高精度,大量程测量,反应快,数字化输出特点;体积小,重量轻,机构紧凑,安装方便,维护简单,工作可靠。
编码器以测量方式来分,有直线型编码器,角度编码器,旋转编码器。
如以信号原理来分,有增量型编码器,绝对型编码器。
增量型编码器(旋转型)
工作原理:
由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。
编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。
分辨率—编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。
编码器机械外型—编码器以转轴类型分,有轴型和轴套型;以外形特征和安装法兰分,有同步法兰,夹紧法兰,紧凑型;轴套型又有半空型、全空型、大轴径型。
编码器轴径—编码器轴径有6毫米*、8毫米、10毫米*、12毫米,轴套型的有8毫米、10毫米、12*毫米、大口径20—50*毫米,带*号的是常规规格。
机械转速和电气转速
编码器的机械转速以每分钟最大可以旋转多少圈表示—rpm;
编码器的电气转速也称为开关频率,是读取每个脉冲信号的反应速度,以每秒多少次表示--Hz
最大工作速度应同时兼顾编码器的机械转速、电气转速以及编码器后续接收设备的开关频率。
Nmax=Fmax×60/Z ; N—min-1 ;F—Hz
编码器的工作温度和防护等级
编码器的最高最低工作温度代表了编码器内部机械和电子零件的水平,较好的编码器工作温度从-40到100℃,事实上低温情况下,受限制的是内部电子零件和外部的电缆以及密封特性。
防护等级是指编码器的防尘、防水性能,以国际标准IP的两位数表示,第一位0—6代表防尘,第二位0—7代表防水,IP54是最低的有限制条件的防尘防水标准,IP67可防水浸。
并非在室内恒温条件下工作就不需要防水,因为编码器在工作和停机两种情况下,内部空气会热胀冷缩,密封不好,在停机是会有压缩性水气进入。
专业的编码器的防护等级分电气外壳部分和转轴部分,有不同。
转轴部分由于编码器的旋转要求,往往要略低。
工作电压、耗电流—工作电压一般有10—30Vdc和5Vdc±10%两种,电压和耗电流决定供电电源的功率。
信号输出:
信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形
式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。
信号连接—编码器的脉冲信号一般连接计数器、PLC、计算机,PLC和计算机连接的模块有低速模块与高速模块之分,开关频率有低有高。
如单相联接,用于单方向计数,单方向测速。
A、B两相联接,用于正反向计数、判断正反向和测速。
A、B、Z三相联接,用于带参考位修正的位置测量。
A、A-,
B、B-,Z、Z-连接,由于带有对称负信号的连接,电流对于电缆贡献的电磁场为0,衰减最小,抗干扰最佳,可传输较远的距离。
对于TTL的带有对称负信号输出的编码器,信号传输距离可达150米。
对于HTL的带有对称负信号输出的编码器,信号传输距离可达300米。
倍频技术
信号二倍频
二倍频信号通过A相和B相的”异或”转换获得
信号四倍频
四倍频信号通过A信号和B信号的正跳沿及负跳沿获得
分辨率与精度—分辨率是指传感器可以分辨读数的最小单位,而精度是指每个读数与标准位置的最大误差,两者不是一个概念,精度由码盘刻线、转轴同心度、材料的温度特性、电子读数的即时等各方面因数决定。
电子细分技术—利用编码器的正弦波信号的相位变化,由电子设备在一条刻线上再分出多个位置,此为电子细分技术,这样原来的编码器分辨刻线可以成倍的增加,但是细分只是提高了分辨刻线,并没有改变原来的精度。
内插细分—有一些“高分辨数”的编码器是由内插的电子细分以提高每圈的刻线,但是其精度并不高,不能以其提供的高线数而理解成高精度编码器。
内置电池—有一些编码器以内置电池来避免断电的信号丢失,也有一些编码器以单圈是绝对信号,而多圈圈数信号是内置电池与电路用增量计数的方法来获得,此为伪绝对型编码器,其受电池寿命、电池低温失效、受振电池触点不良等因数影响,而大大降低可靠性。
其他主要参数根据需要参看样本:
电缆或插座,最大传输距离,最大轴负载,振动,冲击,启动力矩,转子瞬间惯性等
增量式编码器的问题:
增量型编码器存在零点累计误差,抗干扰较差,接收设备的停机需断电记忆,开机应找零或参考位等问题,这些问题如选用绝对型编码器可以解决。
增量型编码器的一般应用:
测速,测转动方向,测移动角度、距离(相对)。