第5章轮系及其设计
- 格式:doc
- 大小:99.50 KB
- 文档页数:2
机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
《机械设计基础》习题解答机械工程学院目录第0章绪论-------------------------------------------------------------------1第一章平面机构运动简图及其自由度----------------------------------2第二章平面连杆机构---------------------------------------------------------4第三章凸轮机构-------------------------------------------------------------6第四章齿轮机构------------------------------------------------------- -----8第五章轮系及其设计------------------------------------------------------19第六章间歇运动机构------------------------------------------------------26第七章机械的调速及平衡------------------------------------------------29第八章带传动---------------------------------------------------------------34第九章链传动---------------------------------------------------------------38第十章联接------------------------------------------------------------------42第十一章轴------------------------------------------------------------------46第十二章滚动轴承---------------------------------------------------------50第十三章滑动轴承-------------------------------------------------------- 56第十四章联轴器和离合器------------------------------- 59第十五章弹簧------------------------------------------62第十六章机械传动系统的设计----------------------------65第0章绪论0-1机器的特征是什么?机器和机构有何区别?[解] 1)都是许多人为实物的组合;2)实物之间具有确定的相对运动;3)能完成有用的机械功能或转换机械能。
绪论构件机器中的各运动单元零件不能再分拆的单个物体(独立的制造单元)机构已知运动变换成其他构件所需要运动的构件组合体。
机构,是两个以上的构件通过可动联接形成的构件系统。
各构件之间具有确定的相对运动机器是一种能实现预期运动的构件组合系统,用以代替人工完成能量、信息的转换或作出有用的机械功运动链两个以上构件通过运动副的连接而构成的构件系统如何从运动链得到机构运动链中其余构件都能得到确定的相对运动构件是机械运动的最小单元,零件是机械制造的最小单元。
作空间和平面运动的独立构件,其自由度数分别为3和6。
运动副是两个构件以一定形状的运动副元素直接接触,限制了某些自由度,而又保留了某些自由度的一类可动连接,运动副是以它们所提供的数来划分其级别的,因此共有I到V级运动副。
一个封闭运动链,若已知其构件数为 N,运动副数为 p,则其闭合回路数k=p+1-N基本杆组是不可再分的自由度为零的构件组。
常用的基本杆组有 RRR 组、RRP 组和 RPR 组第一章机构的结构设计一.自由度计算F = 3n - 2PL – PHn 为活动构件PL 为低副PH为高副计算自由度时应注意的问题:1.复合铰链二个以上构件在同一轴线上构成的多个转动副时,称为复合铰链若有m个构件,则有m-1个转动副2.虚约束对机构的运动不起独立限制作用的重复约束。
计算自由度时要去除掉出现场合:1)两构件构成多个运动副两构件构成多个移动副导路重合或平行两构件组成多个转动副,同轴两构件构成高副,两处接触,法线重合目的:改善构件的受力情况2)运动过程中,两构件上的两点距离始终不变3)联接点与被联接点轨迹重合4)对运动不起作用的对称部分3.局部自由度处理方法:钉死目的:减少高副的磨损二.高副低代方法:1.在高副两个曲率中心之间画出替代构件2.替代构件分别与组成高副的两个构件相联3.组成高副的两个构件应去掉高副、简化成杆三.基本杆组的拆分(拆分时提前高副低代)杆组: F=01)II级组 n=2 PL=3RRR RRP RPR PRP PPRR为转动副 P为移动副结构特征:两个含有外接副的构件直接(用运动副)联接2)Ⅲ级组 n=4 PL=6结构特征:三个含有外接副的构件与同一构件(用运动副)联接3)Ⅳ级组(n=4,PL=6)结构特征:两个含有外接副的构件通过两个构件间接相联拆分步骤1.计算F;确定原动件;去掉虚约束、局部自由度;注意复铰。
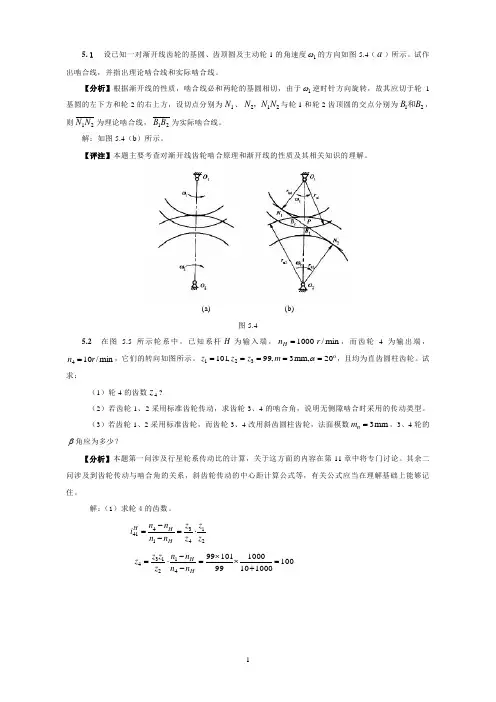
5.1 设已知一对渐开线齿轮的基圆、齿顶圆及主动轮1的角速度1ω的方向如图5.4(a )所示。
试作出啮合线,并指出理论啮合线和实际啮合线。
【分析】根据渐开线的性质,啮合线必和两轮的基圆相切,由于1ω逆时针方向旋转,故其应切于轮1基圆的左下方和轮2的右上方,设切点分别为1N 、212N N N ,与轮1和轮2齿顶圆的交点分别为21B B 和,则21N N 为理论啮合线,21B B 为实际啮合线。
解:如图5.4(b )所示。
【评注】本题主要考查对渐开线齿轮啮合原理和渐开线的性质及其相关知识的理解。
(a) (b)图5.45.2 在图 5.5所示轮系中,已知系杆H 为输入端,1000=H n min /r ,而齿轮4为输出端,min /104r n =,它们的转向如图所示。
20mm,3,99,101321=====αm z z z ,且均为直齿圆柱齿轮。
试求:(1)轮4的齿数4z ?(2)若齿轮1、2采用标准齿轮传动,求齿轮3、4的啮合角,说明无侧隙啮合时采用的传动类型。
(3)若齿轮1、2采用标准齿轮,而齿轮3、4改用斜齿圆柱齿轮,法面模数mm 3=n m ,3、4轮的β角应为多少?【分析】本题第一问涉及行星轮系传动比的计算,关于这方面的内容在第11章中将专门讨论。
其余二问涉及到齿轮传动与啮合角的关系,斜齿轮传动的中心距计算公式等,有关公式应当在理解基础上能够记住。
解:(1)求轮4的齿数。
21431441z z z z n n n n i H H H⋅=--=10010001010009910199412134=+⨯⨯=--⋅=HH n n n n z z z z图5.5(2)计算啮合角。
1,2为标准齿轮 mm 30023)10199(2)(2112=⨯+=+=mz z a而 mm 5.29823)10099(2)(4334=⨯+=+=mz z a要使轮系满足同心条件,则mm,300'34=a 故3,4轮的啮合角'34a 为 ︒=︒==773.2030020cos 5.298cos arccos1234'34a a a α由于mm 5.2983003412'34=>==a a a 故为正传动。