- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对于给定的传递函数为 G ( S ) 为 1. 5/ [ ( 5 S
+ 1) ( S + 1) (3 S + 1) ]的控制对象 ,采用模糊控制 器对其进行控制 ,其中模糊控制器的控制规则采
用上述遗传算法进行寻优 。
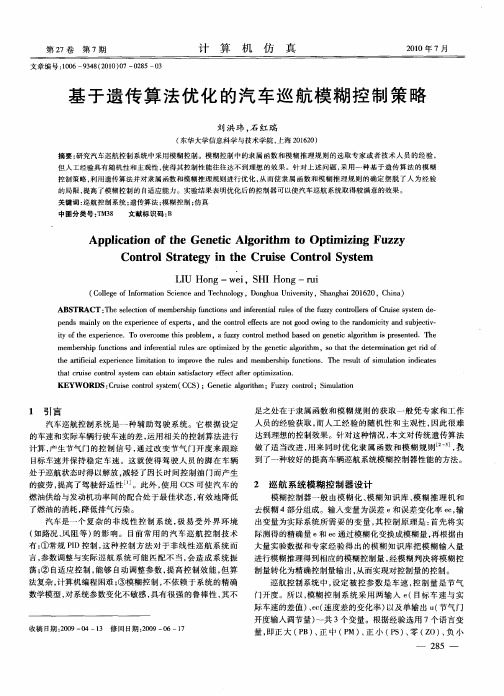
表 1 群体进化表
序号
1 2 3
初始群体
30. 63 58. 15 76. 21
第 20 代 11. 98 13. 80 14. 08
随机地互换部分串位形成后代串 。 变异 。以一定的概率 Pm 改变串的某个位置
的值 。
3 用于模糊控制规则寻优的基本步骤
3. 1 模糊控制规则寻优操作流程 根据遗传算法的运行过程可知 , 群体 X ( t)
在遗传算子的作用下变为群体 X ( t + 1) , 因此 , 可将遗传算法看作如图 1 所示的系统 。
其中 , f ( x ) 为适值函数 ; q 为遗传算法的控 制参数集合 ,如交叉概率 、变异概率等 ; N = | X | 为群体大小 。
简单遗传算法的操作流程如图 2 所示 。当用 于模糊控制规则寻优时 ,其操作流程如下 :
3. 2 模糊规则的编码译码 一组模糊规则可看作一组输入输出变量模糊
度的排列组合 。一个 n - 规则模糊系统 (指有 n 个 规则的系统 ,且规则数目不大于最大可列规则数 ε) ,输入变量为 n 个 ,每一输入变量 x i 有εi 档语 言变量 , 则可列举的规则组合数为ε1ε2 …εn ,在 输入变量的模糊度组合排列次序确定的情况下 , 只需记录输出变量在该组合排列次序下的模糊规 则结论的模糊度 。而输出变量的模糊度很容易用
第 40 代 6. 53 7. 04 7. 24
初始群体通过随机方式确定参数 ,初始化群 体的个数 N = 50 ,采样周期 T = 0. 1 s。将初始状 态以及进化到第 20 代和第 40 代时的适应值在前 几位的目标函数和阶跃响应曲线 (1 ,2 ,3 分别为 前 3 位的响应曲线) 分别表示在表 1 及图 3 、4 中 。
[4 ] Potts J C , Gidens T D , Yadav S B. The Development and Evaluation of an Improved Genetic Algorit hm Based on Migrtion and Artificial Selection [J ] . IEEE Trans. on Systems , Man , and Cybemetics. 1994 , 24 (1) :73 - 86.
⑦由最大适值的样本解码 ,得到优化的控制 规则 。
4 模糊控制系统仿真实例
从图 3 、4 以及表 1 可知 ,采用遗传算法寻优 , 对象的阶跃响应可以很快收敛于稳定值 。而且进 化到第 20 代时相对于初始种群控制效果已明显 提高 ,进化到第 40 代时已经达到很好的效果 。
5 结束语
在介绍了遗传算法的基本原理的同时 ,采用 遗传算法进行模糊控制规则的寻扰 。并通过实验 表明 ,遗传算法作为一种有效的优化技术运用于 规则自学习取得了良好的效果 。
36 武汉理工大学学报·信息与管理工程版 2002 年 6 月
代的种群 ,然后计算出各样本的目标函数值及其 最大值和适值 ;
⑤计算新一代种群的适值总和 、最大值 、平均 值 、最小值及最大值样本序号 ;
⑥判断是否满足终止条件 (一般迭代 20 次则 种群稳定) ,在次选择终止条件为迭代 40 次 ,若不 满足 ,则返回到 ③;
∫ 此选择的目标函数为 : J = t | e | d t ,考虑到目
标函数优化方向应对应适值增加的方向 ,可以将 目标函数 J 转换成如下适值函数 :
F = FMAX - J
式中 , FMAX表示本生育代目标函数 J 的最大值 。 3. 4 计算过程
程序框图与简单遗传算法流程图类似 。 ①随机初始化初始群体的参数 ,初始群体的 个数取 N = 20 ,根据目标函数计算出目标函数值 J 及相应的适值 ; ②计算出初始群种的适值总和 、最大值 、平均 值 、最小值及最大值样本序号 ; ③繁殖操作 。根据优胜劣汰原则 ,计算出每 个样本的适值与平均适值之比 ,将其四舍五入取 整 ,如果小于 1 则淘汰 ,反之 ,则用最大适值的样 本繁殖 ,最后保持种群样本个数不变 ,即 N = 20 不变 ; ④交叉和变异操作 。从上一代种群中随机的 两两配对 ,以交叉概率为 0. 8 随机地选取交叉位 进行交叉操作 ,变异概率为 0. 01 。由此产生新一
文章编号 :1007 - 144X(2002) 03 - 0034 - 03
遗传算法在模糊控制规则优化中的应用
施青平
(武汉理工大学自动化学院 ,湖北 武汉 430070)
摘 要 :对于给出的一种模糊控制系统 ,基于遗传算法 ,对模糊规则进行了优化 。并通过仿真表明 ,采用遗传 算法寻优能获得较好的控制效果 。 关键词 :遗传算法 ;模糊控制 ;规则优化 中图法分类号 : TP 273. 4 文献标识码 :A
目前遗传算法的研究主要分为工作原理[5 ] 、 计算模型[6 ] 、编码方式[7 ] 、操作符[8 ] 、早熟收敛问 题 、问题结构类型等领域[9 ] 。根据编码方式的不 同 ,遗传算法主要分为二进制编码遗传算法和实 数编码遗传算法两种形式 。二进制编码遗传算法 适合用在组合优化方面 ,而实数编码主要适用于 方程优化 。
二进制数来表示 ,因此 ,一组模糊规则可用一个二 进制数串来表示 。例如 ,对于 2 输入 1 输出的模 糊控制器 ,每个变量分别划分为 3 个模糊度 ( S , M , L ) , S , M , L 可分别用二进制数 01 ,10 ,11 来 表示 。9 条规则可转化为一长度为 18 的二进制 串 ,同样给定一长度为 18 的二进制串可转化为 9 条模糊规则 。在规则转化为二进制串的过程中 , 只需将相应的模糊规则一一串联即可 。例如 ,模 糊规则串 111001010111101011 表示的模糊规则 组合为
模糊控制是以模糊数学为基础的新型智能控 制方法[10 ] 。模糊系统是对人类处理模糊性概念 机及其推理机制的模拟 。最初在模糊系统的设计 中 ,推理方法的选取 、隶属函数形状及参数的选 取 、相关权重的确定以及规则库的确定 ,均是由专 家根据实际经验指定的 ,这也曾被认为是模糊系
统较之经典解析模型的一大优点 。但是人们也发 现 ,对设计好的模糊系统中的一些参数基于数据 进行调谐可以大大提高模糊系统的性能 ,同时大 量学者研究了基于经典优化的模糊系统训练学 习 ,大部分可归纳入模糊神经网络框架 。遗传算 法与模糊系统的相互融合也是今天人们所关注的 话题 。遗传算法已应用于隶属函数形状与参数设 计 ,系统相关权重的优化等方面 。
[ 7 ] Louis S J , Fang Z. Doman Knowledge for Genetic Slgorit hms [ R ] . Nevada : Department of Computer and Science , Mackay School of Mines , University of Nevada ,Reno - NV89557 ,1989.
1 前 言
遗传算法是近年来发展起来的基于生物界自 然选择和自然遗传机制的随机化搜索算法 。它属 于直接法 ,其主要特点是群体搜索策略和群体中 个体 之 间 的 信 息 交 换 , 搜 索 不 依 赖 于 梯 度 信 息[1 ] 。它尤其适用于处理传统方法难于解决的 复杂和非线性问题 ,可广泛应用于结构优化设 计[2 ] 、机器学习[3 ] 、计算机网络[4 ] 、自适应控制 、 规划设计和人工生命的领域 。它是模拟自然界中 的进化过程或演变过程的算法模型 ,它把适者生 存与结构化 ,随机化的信息交换结合在一起 ,形成 一种搜索算法 。它与传统搜索算法有很多不同之 处 ,主要是遗传算法直接使用问题参数的适当编 码 ,从问题的解组成的群体开始搜索寻找最优解 , 使用目标函数值的信息进行搜索而不考虑目标函 数的数学特性并以一定的概率使用三种遗传操作 进行搜索而不用确定规则 。
[ 3 ] Louis S J . Working from Blueprints : Evolutionary Learning for Design [ R ] . Nevada : Department of Computer Science , Unigersity of Negad , Reng 89557 ,1989. 1 - 13.
第 24 卷 第 3 期 武汉理工大学学报·信息与管理工程版 Vol. 24 No. 3 2002 年 6 月 JOURNAL OF WU T ( INFORMA TION & MANA GEMEN T EN GIN EERIN G) J u法 ,庄镇泉 ,王东生. 遗传算法及其应 用[ M ] . 北京 :人民邮电出版社 ,1996.
[ 2 ] Louis S J . Genetic Algorit hm as a Computational Tool for Design[ D ] . Indiana :Department of Computer Sci2 ence , Indiana Unigersity ,1993.
模糊规则的设定是模糊控制器开发的核心 , 但对于 2 个以上输入或每个输入超过 3 个模糊度 的控制对象 ,人工设定模糊规则是很困难的 。目 前 ,在模糊控制推理中大多采用 min 、max 、重心 法 ,但这种方法由于使用 min 、max 这种非线性很 强的运算 ,推理过程不一定满足直感的推断 ,因 此 ,提出了用代数积代替 min 、用加法代替 max 的 代数积 - 加法 - 重心法等模糊推理算法 。近年 来 ,为了简化计算和分析 ,提出了函数型推理等简 化算法 。研究模糊规则的自动生成有着重要的学 术和应用价值 。遗传算法以其优良的寻优特性被 用于模糊规则的自动生成 。